空间大地测量(二)
介绍测绘技术中的大地测量和空间测量
介绍测绘技术中的大地测量和空间测量测绘技术是一门以测量为基础、以数据处理为手段、以地图与产品制作为目标的综合性技术。
在现代社会发展中,测绘技术的应用范围越来越广泛,不仅在国土资源管理、城市规划和建设、环境监测等方面发挥着重要作用,而且在工程建设、航空航天、农业生产等众多领域都起到了不可替代的作用。
大地测量是测绘技术中的重要组成部分,它主要研究地球表面上点的位置、形状和尺寸等问题。
大地测量的起源可以追溯到古代,当时人们通过天文观测来测量地球的尺寸和形状。
随着科学技术的发展,大地测量逐渐借助仪器设备进行,取得了巨大的进展。
在大地测量中,常用的测量方法有三角测量、水准测量和重力测量等。
三角测量是通过测量三角形的边长和角度来计算地球上点的位置和距离的方法,它是大地测量中最常用的方法之一。
水准测量是利用水平面的性质来测量两点之间的高差,进而确定地球表面上点的高度。
重力测量则是通过测量重力场的变化来研究地球尺寸和形状的方法。
除了大地测量外,空间测量也是测绘技术中的重要内容。
空间测量主要研究三维空间中点的位置和形状,并通过数学模型和测量数据进行建模和分析。
空间测量的核心技术是全球定位系统(GPS)和地理信息系统(GIS)。
全球定位系统是一种利用卫星信号进行定位和导航的技术,它由一组卫星、地面接收设备和数据处理系统组成。
通过接收卫星发射的信号,地面接收设备可以确定自身的位置和时间,并将这些数据传输给数据处理系统进行处理。
全球定位系统可以实现高精度的空间定位和导航,广泛应用于交通运输、农业生产、灾害监测等领域。
地理信息系统是一种用于收集、存储、管理和分析地理空间数据的系统。
地理信息系统将地理空间数据与属性数据相结合,通过空间查询和分析功能,为决策者提供可视化的地理信息支持。
地理信息系统可以帮助我们理解地理空间现象,优化资源配置,支持决策和规划。
测绘技术中的大地测量和空间测量相互关联,互为补充。
大地测量提供了地球表面上点的位置和形状等信息,而空间测量则将这些信息整合到三维空间模型中,实现对地球表面的全面描述。
《大地测量学基础》2 大地测量基础知识
大地测量学基础
第二节 常用大地测量坐标系统
一、天球坐标系
用途:描述人造卫星的位臵采用天球坐标系是方便的。也 可以描述天空中的恒星的坐标。
Z
表示方式:球面坐标(r,α,δ) 或者直角坐标(X,Y,Z) 二者具有唯一的坐标转换关系。
X γ O α
P r δ
Y
大地测量学基础
第二节 常用大地测量坐标系统
2 2 2
大地测量学基础
第二节 常用大地测量坐标系统
四、高斯平面直角坐标系
建立过程:如下图
高斯正形投影又称横轴 等角切椭圆柱投影
大地测量学基础
第二节 常用大地测量坐标系统
四、高斯平面直角坐标系
高斯投影的特点: 1.椭球面上角度投影到平面上后保持不变 2.中央子午线投影后为X轴, 在X轴上投影后长度不变 3.赤道投影线为Y轴 4.中央子午线与赤道交点投影后为坐标原点 5.距中央子午线越远, 投影变形越大, 为减少变形应 分带投影
二、大地水准面
特点:地表起伏不平、地壳内部物质密度分布不均匀, 使得重力方向产生不规则变化。由于大地水准面处处与铅 垂线正交,所以大地水准面是一个无法用数学公式表示的 不规则曲面。故大地水准面不能作为大地测量计算的基准 面。
大地测量学基础
第一节 大地测量的基准面和基准线
三、参考椭球面
把形状和大小与大地体相近,且两者之间相对位臵确 定的旋转椭球称为参考椭球。参考椭球面是测量计算的基 准面,椭球面法线则是测量计算的基准线。
大地测量学基础
第二章 大地测量 基础知识
山东科技大学地科学院测绘系
大地测量学基础
第一节 大地测量的基准面和基准线
本节重点研究以下四个表面
地球自然表面
《GPS原理及其应用》习题
《GPS原理及其应用》习题集第一章思考题[1]名词解释:天球;赤经;赤纬;黄道;春分点;岁差;章动;极移;世界时;原子时;协调世界时;儒略日。
[2]简述卫星大地测量的发展历史,并指出其各个发展阶段的特点。
[3]试说明GPS全球定位系统的组成。
[4]为什么说GPS卫星定位测量技术问世是测绘技术发展史上的一场革命?[5]简述GPS、GLONASS与NA VSAT三种卫星导航定位系统工作卫星星座的主要参数。
[6]简述(历元)平天球坐标系、(观测)平天球坐标系以及瞬时极(真)天球坐标系之间的差别。
[7]怎样进行岁差旋转与章动旋转?它们有什么作用?[8]为什么要进行极移旋转?怎样进行极移旋转?[9]简述协议地球坐标系的定义。
[10]试写出由大地坐标到地心空间直角坐标的变换过程。
[11]综述由(历元)平天球坐标系到协议地球坐标系的变换过程。
[12]简述恒星时、真太阳时与平太阳时的定义。
[13]什么是GPS定位测量采用的时间系统?它与协调世界时UTC有什么区别?[14]试述描述GPS卫星正常轨道运动的开普勒三大定律。
[15]试画图并用文字说明开普勒轨道6参数。
[16]简述地球人造卫星轨道运动所受到的各种摄动力。
[17]地球引力场摄动力对卫星的轨道运动有什么影响?[18]日、月引力对卫星的轨道运动有什么影响?[19]简述太阳光压产生的摄动力加速度,并说明它对卫星轨道运动有何影响?[20]综述考虑摄动力影响的GPS卫星轨道参数。
[21]试写出计算GPS卫星瞬时位置的步骤。
第二章思考题[1]名词解释:码;码元(比特);数码率;自相关系数;信号调制;信号解调;SA技术。
[2]试说明什么是随机噪声码?什么是伪随机噪声码?[3]C/A码和P码是怎样产生的?[4]试述C/A码和P码的特点。
[5]试述伪随机噪声码测距原理。
[6]试述导航电文的组成格式。
[7]名词解释:遥测字;交接字;数据龄期;时延差改正;传输参数。
[8]简述导航电文数据块Ⅱ的主要内容。
空间大地测量技术的原理和应用

空间大地测量技术的原理和应用近年来,随着信息技术的飞速发展和社会经济的快速进步,空间大地测量技术逐渐成为人们关注的焦点。
空间大地测量技术是一种利用空间技术手段获取地球大地测量数据的方法,具有重要的理论和应用价值。
一、原理空间大地测量技术的原理主要基于卫星导航定位和精密测量。
卫星导航定位是通过利用卫星系统对地球表面进行测量,得到地球表面点坐标的方法。
目前,全球广泛使用的GNSS系统(全球导航卫星系统)就是其中之一。
GNSS系统通过将大量自主运行的卫星分布在地球轨道上,利用空间信号与地面设备进行通讯,测量地球表面点的位置。
精密测量是利用现代高精度仪器进行测量,通过多种数据处理和数学模型运算,来获得地球表面点的真实坐标。
这些仪器旨在提供高精度、高稳定性、高分辨率的测量结果。
常见的精密测量仪器包括全站仪、测量雷达、激光扫描仪等。
二、应用空间大地测量技术在许多领域有着广泛的应用。
1. 地质灾害监测地质灾害是世界各国面临的共同问题。
通过空间大地测量技术,可以实时监测地质灾害的变化和趋势,为预测和预警提供科学依据。
利用卫星导航定位技术和精密测量仪器,可以监测山体滑坡、地震、地裂缝等地质灾害的发生和演化过程,及时采取措施减少损失。
2. 地理信息系统地理信息系统(GIS)是一种基于计算机和空间大地测量技术的地理信息管理系统。
通过将地球上的各种地理数据与地球表面点的坐标和属性相结合,进行多层次、多元素、高精度的数据集成和空间分析。
3. 基础设施建设空间大地测量技术在基础设施建设中起着重要的作用。
无论是道路、桥梁、隧道还是高铁、机场等建设工程,都需要准确的地理空间数据支撑。
空间大地测量技术可以提供地籍测量、工程测量和形变监测等服务,保证工程的精度和稳定性。
4. 海洋资源勘探海洋是人类的重要资源之一。
利用空间大地测量技术,可以对海洋空间进行广泛的监测和勘探,包括海底地形、洋流、海洋生态系统等。
通过对这些数据进行分析和整理,可以为海洋资源的合理开发和保护提供科学依据。
大地测量学第2章

原子时(AT)
原子时:是一种以原子谐振信号周期为标准。原子时的基本单位是原子时 秒,定义为:在零磁场下,位于海平面的铯原子基态两个超精细能级间跃 迁辐射9192631770周所持续的时间为原子时秒,规定为国际单位制中的 时间单位。
根据原子时秒的定义,任何原子钟在确定起始历元后,都可以提供 原子时。由各实验室用足够精确的原子钟导出的原子时称为地方原子时。
高程参考系统
以大地水准面为参照面的高程系统称为正高,以似大地水准面为参照面的 高程系统称为正常高的高程系统。 正常高H正常及正高H正与大地高有如下关系:
H=H正常+ H=H正+N 式中: ——高程异常,N——大地水准面差距。
大地水准面相对于旋转椭球面的起伏
大地测量参考框架(Geodetic Reference Frame)
大地测量参考系统(Geodetic Reference System)
坐标参考系统:分为天球坐标系和地球坐标系。
天球坐标系:用于研究天体和人造卫星的定位与运动。
地球坐标系:用于研究地球上物体的定位与运动,是以旋转椭球为参照体 建立的坐标系统,分为大地坐标系和空间直角坐标系两种形式
大地坐标系
空间直角坐标
TAI-GPST=19(s) GPST的起点,规定1980年1月6日0时GPS与UTC相等。
2.3 坐标系统
基本概念
1.大地基准
所谓基准是指为描述空间位置而定义的点、线、面,在大地测量中,基准是 指用以描述地球形状的参考椭球的参数(如参考椭球的长短半轴),以及参考 椭球在空间中的定位及定向,还有在描述这些位置时所采用的单位长度的定义。
2. 天球
天轴与天极:地球自转轴的延伸直线为天轴;天轴与天球的交点称为天极( 为北天极 为南天极)。 天球赤道面与天球赤道:通过地球质心 与天轴垂直的平面,称为天球赤道面,它与天球 {相交的大圆,称为天球赤道。 天球子午面与子午圈:包含天轴并通过地球上任一点的平面,称为天球子午面,它与天 球相交的大圆,称为天球子午圈。 时圈:通过天球的平面与天球相交的半个大圆。 黄道:地球公转的轨道面与天球相交的大圆,黄道面与赤道面的夹角 ,称为黄赤空角, 约为23.5 。 黄极:通过天球中心,且垂直于黄道面的直线与天球的交点。其中靠近北天极的交点 称 为北黄极,靠近南天极的交点 为南黄极。 春分点:当太阳在黄道上从天球南半球向北半球运行时,黄道与天球赤道的交点r。
空间大地测量(sar和insar)
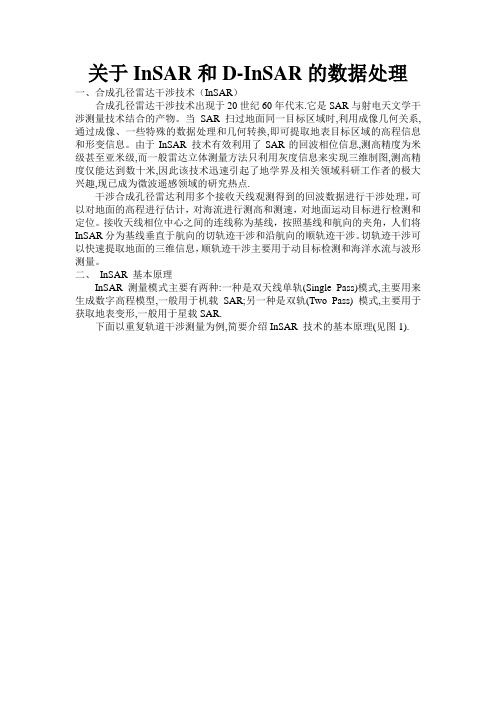
关于InSAR和D-InSAR的数据处理一、合成孔径雷达干涉技术(InSAR)合成孔径雷达干涉技术出现于20世纪60年代末.它是SAR与射电天文学干涉测量技术结合的产物。
当SAR扫过地面同一目标区域时,利用成像几何关系,通过成像、一些特殊的数据处理和几何转换,即可提取地表目标区域的高程信息和形变信息。
由于InSAR 技术有效利用了SAR的回波相位信息,测高精度为米级甚至亚米级,而一般雷达立体测量方法只利用灰度信息来实现三维制图,测高精度仅能达到数十米,因此该技术迅速引起了地学界及相关领域科研工作者的极大兴趣,现已成为微波遥感领域的研究热点.干涉合成孔径雷达利用多个接收天线观测得到的回波数据进行干涉处理,可以对地面的高程进行估计,对海流进行测高和测速,对地面运动目标进行检测和定位。
接收天线相位中心之间的连线称为基线,按照基线和航向的夹角,人们将InSAR分为基线垂直于航向的切轨迹干涉和沿航向的顺轨迹干涉。
切轨迹干涉可以快速提取地面的三维信息,顺轨迹干涉主要用于动目标检测和海洋水流与波形测量。
二、InSAR 基本原理InSAR 测量模式主要有两种:一种是双天线单轨(Single Pass)模式,主要用来生成数字高程模型,一般用于机载SAR;另一种是双轨(Two Pass) 模式,主要用于获取地表变形,一般用于星载SAR.下面以重复轨道干涉测量为例,简要介绍InSAR 技术的基本原理(见图1).假设卫星以一定的时间间隔和轨道偏离(通常为几十米到1km 左右)重复对某一区域成像,并在两次飞行过程中处于不同的空间位置1S 和2S ,则空间干涉基线向量为B,长度为B;基线向量B 与水平方向的夹角为基线倾角α。
1S 和2S 至地面点P 的斜距分别为R 和R+△R;将基线沿视线方向分解,得到平行于和垂直于视线向的分量||B 、'B ;H 为1S 到参考面的高度;从1S 发射波长为λ的信号经目标点P 反射后被1S 接收,得到测量相位1ϕ,114arg{}R u πϕλ=+(1)同样,另一空间位置2S 上测量到相位2ϕ,224()arg{}R R u πϕλ=+∆+(2)式中,arg{1u }和arg{2u }表示不同散射特性造成的随机相位.假设两幅图中随机相位的贡献相同,则1S 和2S 关于目标P 点的相位差124R πφϕϕλ=-=-∆(3) 也称为干涉相位,可由经过配准的两幅SAR SLC 图共扼相乘得到.根据图1中的几何关系并利用余弦定理可得: 222()sin()2R B R R RBθα+-+∆-=(4) cos h H R θ=-(5)由于R R ∆且R B ,则||sin()R B B θα∆≈-=(6) (4)、(5) 两式即为In SAR 确定高程的原理性公式.三、合成孔径雷达差分干涉测量(D-InSAR)D-InSAR 技术是在主动式微波合成孔径雷达 SAR 相干成像基础上发展起来的,它以合成孔径雷达复数据提供的相位信息为信息源,可从包含目标区域地形和形变等信息的一幅或多幅干涉纹图中提取地面目标的微小形变信息。
空间大地测量理论基础

卫星导航定位系统
• 用户用接收机测定至导航卫星的距离或距离变率 并依据观测瞬间卫星在空间的位置采用距离交会 法或距离差交会法来确定自己的位置及运动速度 等要素的无线电导航定位系统称为卫星导航定位 系统。
• 空间大地测量中经常采用的各种坐标实际上是通 过岁差、章动、极移和地球自转而相互联系起来 的。因此掌握岁差、章动、极移和地球自转的知 识就成为正确进行各种坐标系转换的基础。
3.时间系统和坐标系统
• 在空间大地测量中经常要涉及各种时间坐 标(如世界时,原子时,协调世界时,动 力学时及GPS时等)和各种坐标系统(如 天球坐标系,地球坐标系及轨道坐标系 等)。
• 由于这种方法的精度较低,观测受气候条件限制, 资料处理又相当繁杂,故目前在大地定位及测定 重力场等领域已很少使用。
2.卫星激光测距
• 用安置在地面测站上的激光测距仪向专用的激光卫星发射 激光脉冲信号,该信号经安置在卫星表面的反射棱镜反射 后返回测站,精确测定信号往返传播的时间并进而求出从 仪器至卫星的距离的方法和技术称为卫星激光测距。
(二)卫星大地测量
• 利用人造地球卫星来精确确定点的位置; 测定地球的形状、大小及外部重力场;以 及它们的变化状况的理论、方法和技术称 为卫星大地测量。
• 卫星大地测量在空间大地测量中占有极其 重要的作用。它主要包括:卫星摄影测量, 卫星激光测距,卫星导航定位,卫星测高, 卫星跟踪卫星,卫星梯度测量等技术。
1.卫星摄影观测
• 在晴朗的夜晚以恒星为背景用人卫摄影仪对卫皇 进行摄影观测,根据已知的恒星坐标,,以及 相片上恒星与卫星间的相对位置来确定从人卫摄 影仪至该卫星的方向的方法和技术称为卫星摄影 观测。
大地测量学基础知到章节答案智慧树2023年南京工业大学

大地测量学基础知到章节测试答案智慧树2023年最新南京工业大学第一章测试1.下面关于大地测量学叙述错误的是()参考答案:大地测量学的目的是测绘地形图2.大地测量学可以分为,几何大地测量学,物理大地测量学以及___。
参考答案:null3.卫星大地测量学属于大地测量学中的哪一分支()参考答案:空间大地测量学第二章测试1.下列关于地球的自转的说法哪一项是正确的()参考答案:岁差和章动导致地轴方向相对于空间的变化2.天球坐标系用于研究天体和人造卫星的定位与运动,地球坐标系用于研究地球上物体的定位与运动。
()参考答案:对3.以春分点作为基本参考点,由春分点周日视运动确定的时间,称为___。
参考答案:null4.下列关于时间系统的说法中错误的是()参考答案:世界时的时间尺度为地球公转5.下列关于的椭球参数的说法正确的是()参考答案:第一偏心率反应椭球体的扁平程度,它反映椭球的扁平程度,越大椭球体越扁6.下列关于关于的椭球定位和定向的说法错误的是()参考答案:椭球定向是指确定椭球旋转轴的方向以及大地起始子午面的位置,地心定位要满足两个平行条件,局部定位无此要求7.下列关于地球坐标系的说法错误的是()参考答案:站心坐标系为全局坐标系,可以分为垂线站心坐标系和法线站心坐标系,坐标展现形式可以为空间直角坐标系和极坐标系。
第三章测试1.经纬仪的三轴误差不包括()参考答案:垂线偏差2.精密测角的误差影响因素不包括()参考答案:平差方法3.在精密经纬仪中,为了提高望远镜系统的质量,物镜、调焦镜和目镜均为复合透镜。
()参考答案:对4.T3读数测微器两次读数之后需要除以2。
()参考答案:错5.双平行板测微器误差包括隙动差、行差等。
()参考答案:对6.方向观测法又称全圆方向观测法,当测站上的方向观测数在2个或者2个以上时,一般采用方向观测法。
()参考答案:错第四章测试1.下面哪一组为地球椭球的基本几何参数()。
参考答案:长半轴、短半轴、扁率、第一偏心率、第二偏心率2.椭球面上某一点的子午圈曲率半径、卯酉圈曲率半径以及平均曲率半径的大小关系()。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
历书时系统(2)
• 这样定义的时间测量系统称为历书时(简写ET) • 1960年起,测量时间的标准是历书时秒 • 纽康给出的太阳几何平黄经的表达式为:
L 27941 48.04 129602768.13T 1.089T 2 dL / dT 129602768.13 1.089T
UT 2 UT 1 T 0 s.022sin 2 t 0 s.012 cos 2 t 0 s.006sin 4 t 0 s.007 cos 4 t
• T以年为单位,从贝赛尔年岁首起算。
世界时系统(7)
• 长期来,人们将地球自转看成是均匀的,包括哥 白尼。 • 1695年,哈雷在计算古代和中世纪的交食时发现 月球运动长期加速现象。 • 1754年,康德提出海洋潮汐摩擦会使地球自转速 度减慢的假说,可以解释哈雷发现的月球运动长 期加速现象,后续发现太阳、水星、金星也有类 似现象。
世界时系统(3)
• 由于真太阳时的不均匀性,1820年,法国科学院 提出秒长定义为:全年中所有真太阳日平均长度的 1/86400为1s,实际工作中无法实时得到秒长。 • 19世纪末。美国天文学家纽康(S.Newcomb)提出 用假想的太阳代替真太阳,简称平太阳。 • 1886年,在法国巴黎召开的国际讨论会同意采用 纽康方法定义平太阳日,从而产生了真正科学意义 上的平太阳时秒长。
原子时历史回顾(2)
• 普朗克建立了量子理论基础 • 爱因斯坦引进了光子受激发射概念 • 波尔运用光子理论解释原子结构并提出能级概念 • 赫兹奠定了无线电频率检测基础 • 布鲁格利、海森堡和薛定谔创立并发展了波动力学 • 施特恩和格拉赫发现了原子磁性和它的空间量子化 • 二次大战后,无线电技术蓬勃发展,频率测量可以达 到30GHz
力学时系统
• 地球动力学时Terrestrial Dynamic Time(TDT) • 地心历书的独立时间变量,秒长同原子时。 • 地球时Terrestrial Time(TT) • 用一个理想的钟在大地水准面上进行测量的均匀 时间变量。
原子时历史回顾(1)
• 1873年,麦克斯韦提出发射光谱的谱线波长和辐 射周期可以用来确定长度单位和时间单位。 • 20世纪30年代,电磁学、量子物理学、原子物理 学和波谱学的发展导致石英钟的问世。 • 石英钟在短期内测量时间的精度优于天文方法, 天体测量学家利用它发现了地球自转速率的季节 性变化。 • 石英钟的出现孕育了50年代分子钟和原子钟的诞 生。
24 18 10 ~ 10 • 目前人类认识时间的水平为 秒
• 寿命只有 10 24 秒。
度量时间的运动
• 选择一种连续的、均匀的物质运动量度时间, 这种运动必须满足下列要求: • 1.必须是连续的周期性运动。 • 2.运动的周期必须有足够的稳定性。 • 3.这种周期运动必须可复现,即可观测的。 • 目前选择的物质运动有: • 1.地球的自转:世界时系统。 • 2.地球的公转:历书时、力学时系统。 • 3 .原子内部电子跃迁时的电磁波震荡:原子 时系统。
空间大地测量(二) 时间系统
陈义 chenyi@
时间系统 • 1.时间的基本知识 • 2.时间系统 • 3.各种时间系统之间的关系 • 4.时间系统之间的换算
时间:时间间隔与时刻
• 时间:物质存在和运动的基本形式之一。判别事 件发生的先后顺序和运动的快慢程度。 • 时间间隔:是指客观物质运动两个不同状态之间 所经过的时间历程。 • 时刻:是指客观物质在某种运动状态的瞬间与时 间坐标轴的原点之间的时间间隔。
时间频率基础
• 周期过程重复出现一次所需要的时间,记为T • 频率是单位时间内周期性过程重复、循环或振 动的次数,记为f。频率与周期的关系如下:
1 f T
• 过去选择周期比较长的运动来计量时间,如 日、年。 • 现在选择周期非常短、频率非常高的运动来计 量时间,如原子运动。
时钟的主要技术指标
历书时系统(1)
• 历书时Ephemeris Time(ET)秒定义 • 任何一个满足牛顿万有引力定律的天体运行历表都 可以给出这样的秒。 • 1950年,IAU选用纽康给出的反映地球公转的太阳 历表作为定义新时间基础,1956年国际计量委员会 给出如下新时间测量标准的秒定义:1900年1月0 日12时正回归年长度的1/31556925.9747,起点为 1900年初太阳几何平黄经为279°41′48.04″的 瞬间,作为历书时1900年1月0日12时正。
T (m ) m t tm
• 时差等于零: • 4月16日, 6月14日 • 9月2日, 12月25日
平恒星时与平太阳时的转换
• 格林尼治的平太阳时与平恒星时如下
G UT tm 12h , S tG
• 则平太阳时和平恒星时之差为:
G S UT tG tm 12h Am 12h
原子时历史回顾(3)
• 1920年,达尔文第一个把磁场中晶体的旋转与谐振 现象联系起来。1927年,菲普斯等人进行了原子非 绝热跃迁实验。 • 1936年,Rabi提出了分子和原子束谐振理论,并进 行了相应实验,得到了原子跃迁频率只取决于其内部 固有特征而与外界电磁场无关的重要结论,揭示了利 用量子跃迁实现频率控制的可能性。 • 1948年,史密斯在美国国家标准局利用拉比方法做 成了吸收型氨分子钟。 • 1949年,Ramsey提出分离振荡场方法
• 由此历书时的单位可表示为:
dT dL /(129602768.13 1.089T )
历书时系统(3)
• 太阳平黄经每增加360°为一个回归年,相应一个 回归年所包含的历书时秒为:
360 60 60 36525 86400 N 129602768.13 2.178T 31556925.9747 0.5303T
S UT Am 12h UT 6h 38m 45s.836 8640184 s.542T 0 s.0929T 2
• Am为平太阳赤经,T为从1900年起算的儒略世纪数
Am 18h38m 45s.836 8640184s.542T 0 s.0929T 2
• 当UT=0时,格林尼治平太阳0的平恒星时为: S 6h38m 45s.836 8640184 s.542T 0 s.0929T 2
世界时系统(6)
• 恒星时、真太阳时、平太阳时具有地方性,地方时 之差等于两地地理经度之差。 • 本初子午线:1884 年,在美国华盛顿的国际会议上 确定采用英国伦敦格林尼治天文台子午仪所在的子 午圈为本初子午圈,即零子午圈。 • 区时:分区统一的地方平时。美国人Word于1870年 首先提出,加拿大铁路工程师Fleming等完善。 • 日期变更线。 • 中国跨越 5 个时区,目前采用东 8 时区的时间为全国 统一的标准时间。
• 真太阳时系统 • 参考点:真太阳视面中心 • 真太阳日的定义:真太阳视面中心连续两次经 过某地上子午圈所经历的时间间隔称做一个真 太阳日, 1 个真太阳日等分成 86400s 。真太阳 时(视时)与真太阳时角关系如下:
T t 12
h
• 真太阳时是不均匀的,真太阳日的最长日与最 短日相差可达51s。
• 1.频率准确度 • 频率准确度是指振荡器所产生的实际振荡频率与 其理论值(标准值)之间的相对偏差。 • 2.频率漂移率 • 频率准确度在单位时间内的变化量称为频率偏移 率。 • 3.频率稳定度 • 频率稳定度反映频标在一定时间间隔内所输出的 平均频率的随机变化程度。
人造钟的质量比较
时间系统
• 地球自转:世界时(Universal Time)系统 • 恒星时,真太阳时,平太阳时 • 世界时,区时 • 地球公转:历书时(Ephemeris Time)系统 • 历书时,地球动力学时 • 质心动力学时,地球时 • 原子振荡:原子时(Atomic Time)系统 • 国际原子时,协调时 • GPS时间GPST
世界时系统(4)
• 平太阳时系统 • 参考点:平太阳视面中心 • 平太阳日的定义:平太阳视面中心连续两次经过 某地下子午圈所经历的时间间隔称做一个平太阳 日,1个平太阳日等分成86400s 。平太阳时(视 时)与平太阳时角关系如下:
m tm 12
h
世界时系统(5)
• 时差 • 时差达到极值 • 2月11日 • 5月14日 • 7月26日 • 11月3日 -14m24s 3m50s -6m18s 16m21s
世界时系统(1)
• 恒星时系统 • 参考点:春分点 • 恒星时的定义:春分点连续两次经过某地上子 午圈的时间间隔称为一个恒星日 , 1 个恒星日 等分成86400个恒星秒。恒星时与春分点的时间 以及天体的赤经和时角的关系如下:
S t t S S 12h
世界时系统(2)
原子时历史回顾(5)
• 1969年,梅乔提出激光冷却和离子囚禁理论。 • 1979年,美国斯坦福大学汉斯克于利用这一理论在 实验室实现了对钠原子的激光减速。 • 1985年,朱棣文等人利用光学黏团首次实现对钠原 子的激光减速。 • 1989年,威曼在美国科罗拉多大学也实现了上述技 术。 • 1996年,法国国家标准实验室利用激光冷却和囚禁 技术研制出第一台铯原子喷泉频率标准。它的准确 度为±3×10-15,长期稳定度可达±2×10-15。
世界时系统(8)
• 目前发现地球自转不均匀有3个部分: • (1)长期减慢,约日长每世纪增加0.0016s, • (2)不规则变化,时而增加、时而减少几个毫秒, • (3)周期变化,有周年、半年、一月、半月等,周 年、半年项引起每年约±1ms的变化。 • 地球自转不均匀性直接导致平太阳日(世界时) 日长的不规则变化,经过季节等改正,平太阳时 秒在1年中仍然有±0.1μs的变化。
原子时历史回顾(4)
• 1953年,美国哥伦比亚大学Townes和中国学者王天眷 等人利用受激辐射放大原理研制成功激射型氨分子钟。 • 1955年,埃森在英国皇家物理实验室研制成功世界上第 一台铯束原子频率标准,开创了实用型原子钟的新纪 元。同时, Rabi的学生萨卡里斯在MIT研制成功实用型 铯原子钟,并于1956年投入商业化生产。 • 目前,铯束频标的准确度为±1×10-12,长期稳定度可 达±2×10-14。 • 1954-55年, Townes 在美国,Basov、Prokhorov在 原苏联完成氢微波激射器。1956年,氢原子钟在美国生 产。