传感器第三章 例题
教科版高中物理选修3-2练习:第三章传感器第3(1)

[推荐]教科版高中物理选修3-2练习:第三章传感器第3第4节实验探究:简单的光控和温控电路1.在家用电器中使用最多的是______传感器,其次是______、______、____、磁、压力、烟雾、声敏等传感器.2.模糊洗衣机中的传感器有:______传感器、________传感器、________传感器、______传感器、________传感器、脏污程度传感器、脱水传感器等.3.集成电路又称IC,是在______上集合各种电子器件,实现某种特定功能的电路模块,它是__________中最重要的部分.4.传感器的种类多种多样,其性能也各不相同,空调机在室内温度达到设定的温度后,会自动停止工作,空调机内使用的传感器是( )A.生物传感器 B.红外传感器C.温度传感器 D.压力传感器5.下列器件是应用力传感器的是( )A.鼠标器 B.火灾报警器C.测温仪 D.电子秤6.用遥控器调换电视机频道的过程,实际上是电视机中的传感器把光信号转化为电信号的过程.下列属于这类传感器的是( )A.红外报警装置B.走廊照明灯的声控开关C.自动洗衣机中的压力传感装置D.电饭锅中控制加热和保温的温控器【概念规律练】知识点一生活中的传感器1.如图1所示为某种电冰箱内温度控制器的结构.铜制的测温泡1、细管2和弹性金属膜盒3连通成密封的系统,里面充有氯甲烷和它的蒸气,构成了一个温度传感器.膜盒3为扁圆形(图中显示它的切面),右表面固定,左表面通过小柱体与弹簧片4连接.盒中气体的压强增大时,盒体就会膨胀.测温泡1安装在冰箱的冷藏室中.5、6分别是电路的动触点和静触点,控制制冷压缩机的工作.拉簧7的两端分别连接到弹簧片4和连杆9上.连杆9的下端是装在机箱上的轴.凸轮8是由设定温度的旋钮(图中未画出)控制的,逆时针旋转时凸轮连杆上端右移,从而加大对弹簧7的拉力.(1)为什么当冰箱内温度较高时压缩机能够自动开始工作,而在达到设定的低温后又自动停止工作?(2)为什么用凸轮可以改变设定的温度?图12.温度传感器是应用最广泛的传感器之一,一般由半导体材料的热敏电阻制成,它可以把热信号转换为电信号,进行自动控制,电饭锅、电饭煲的自动加热和保温就是借助于温度传感器来完成的.电饭锅中应用了温度传感器,它的主要元件是感温铁氧体.感温铁氧体是用氧化锰、氧化锌和氧化铁粉末混合烧结而成的,它的特点是:常温下具有铁磁性,能够被磁体吸引,但是温度上升到约103℃时,就失去了铁磁性,不能被磁体吸引了.这个温度在物理学中称为该材料的“居里温度”或“居里点”.电饭锅的结构如图2所示,试回答以下问题:(1)开始煮饭时为什么要压下开关按钮?手松开后这个按钮是否会恢复到图示的状态?为什么?(2)煮饭时水沸腾后锅内是否会大致保持一定的温度?为什么?(3)饭熟后,水分被大米吸收,锅底的温度会有什么变化?这时电饭锅会自动地发生哪些动作?(4)如果用电饭锅烧水,能否在水沸腾后自动断电?图2知识点二简单的光控电路和温控电路3.路灯晚上为我们照亮道路,天亮之后熄灭,它是通过光线来实现自动控制的,使电路在天亮时自动切断,天黑则自动导通,图3可以模拟光控自动照明电路,其中各元件的参数如下,其中发光二极管相当于路灯.图3如何调试来实现天暗时自动发光,天亮时自动熄灭?4.使用电熨斗时,必须控制电加热过程,以免过热损坏衣服.这就要求,电熨斗的温度低于指定值时电加热器供电加热,温度高于指定值时要将电源关闭,请仿照上题中的光控电路设计一个温控电路.【方法技巧练】传感器问题的分析技巧5.电熨斗在达到设定的温度后就不再升温,当温度降低时又会继续加热,使它总与设定的温度相差不多.在熨烫不同的织物时,设定的温度可以不同,进行这样的控制,靠的是温度传感器.电熨斗中装有双金属片温度传感器,这种双金属片的作用是控制电路的通断,如图4所示为电熨斗的结构图,图中双金属片上层金属的膨胀系数大于下层金属的膨胀系数,请结合所学知识回答以下问题:图4(1)常温下,上、下触点应当是接触的还是分离的?当温度过高时双金属片将起怎样的作用?(2)熨烫棉麻衣物和熨烫丝绸衣物需要设定不同的温度,这是如何利用调温旋钮来实现的?6.如图5所示为某种电子秤的原理示意图,AB为一均匀的滑线电阻,阻值为R,长度为L,两边分别有P1、P2两个滑动头,P1可在竖直绝缘光滑的固定杆MN上保持水平状态而上下自由滑动,弹簧处于原长时,P1刚好指着A端,P1与托盘固定相连,若P1、P2间出现电压,该电压经过放大,通过信号转换后在显示屏上将显示物体重力的大小.已知弹簧的劲度系数为k,托盘自身质量为m0,电源电动势为E,内阻不计,当地的重力加速度为g.求:图5(1)托盘上未放物体时,在托盘自身重力作用下,P1离A的距离x1;(2)托盘上放有质量为m的物体时,P1离A的距离x2;(3)在托盘上未放物体时通常先校准零点,其方法是:调节P2,使P2离A的距离也为x1,从而使P1、P2间的电压为零.校准零点后,将物体m放在托盘上,试推导出物体质量m与P1、P2间的电压U之间的函数关系式.1.如图6所示,将一光敏电阻连入多用电表两表笔上,将多用电表的选择开关置于欧姆挡,用光照射光敏电阻时表针的偏角为θ,现用手掌挡住部分光线,表针的偏角变为θ′,则可判断( )A.θ′=θ B.θ′<θC.θ′>θ D.不能确定θ和θ′的关系2.在电梯门口放置一障碍物,会发现电梯门不停地开关,这是由于在电梯门上装有的传感器是( )A.光传感器 B.温度传感器C.声传感器 D.压力传感器3. 惯性制导系统已广泛应用于弹道式导弹工程中,这个系统的重要元件之一是加速度计.加速度计构造和原理的示意图如图7所示:沿导弹长度方向安装的固定光滑杆上套一质量为m的滑块,滑块两侧分别与劲度系数均为k的弹簧相连;两弹簧的另一端与固定壁相连.滑块原来静止,弹簧处于自然长度,滑块上有指针,可通过标尺测出滑块的位移,然后通过控制系统进行制导.设某段时间内导弹沿水平方向运动,指针向左偏离O点的距离为x,则这段时间内导弹的加速度( )图7A.方向向左,大小为kx/mB.方向向右,大小为kx/mC.方向向左,大小为2kx/mD.方向向右,大小为2kx/m 4.某小型电磁继电器,其中L为含铁芯的线圈.P为可绕O点转动的铁片,K为弹簧,S为一对触头,A、B、C、D为四个接线柱.电磁继电器与传感器配合,可完成自动控制的要求如图8所示.其工作方式是( )A .A 与B 接信号电压,C 与D 跟被控电路串联B .A 与B 接信号电压,C 与D 跟被控电路并联C .C 与D 接信号电压,A 与B 跟被控电路串联D .C 与D 接信号电压,A 与B 跟被控电路并联5.下列器件不是应用温度传感器的是( )A .电熨斗B .话筒C .电饭锅D .测温仪6.某市为了节约能源,合理适时地使用路灯,要求夜晚亮、白天熄,利用半导体的某种特性制成自动点亮、熄灭的装置,实现了自动控制.这是利用半导体的( )A .压敏性B .光敏性C .热敏性D .三种特性都利用了7.如图9所示为一种自动跳闸的闸刀开关,O 是转动轴,A 是绝缘手柄,C 是闸刀卡口,M 、N 接电源线,闸刀处于垂直纸面向里、B =1 T 的匀强磁场中,CO 间距离为10 cm ,当磁场力为0.2 N 时,闸刀开关会自动跳开.则要使闸刀开关能跳开,CO 中通过的电流的大小和方向为( )图9A .电流方向C→O B.电流方向 .电流大小为.电流大小为8.利用传感器和计算机可以研究快速变化的力的大小.实验时,把图10甲中的小球举高到绳子的悬点O 处,然后让小球自由下落.用这种方法获得的弹性绳的拉力随时间的变化图线如图乙所示.根据图线所提供的信息,以下判断正确的是( )图10A.t2时刻小球所处位置是运动中最高点B.t1~t2期间小球速度先增大后减小C.t3时刻小球动能最小D.t2与t5时刻小球速度大小不同9.如图11所示,两块水平放置的金属板距离为d,用导线、电键K与一个n匝的线圈连接,线圈置于方向竖直向上的变化磁场B中.两板间放一台小压力传感器,压力传感器上表面静止放置一个质量为m、电荷量为+q的小球.K断开时传感器上有示数,K闭合时传感器上恰好无示数.则线圈中的磁场B的变化情况和磁通量变化率分别是( )图11A.正在增加,= B.正在减弱,=mgdnqC.正在减弱,= D.正在增加,=mgdnq10.一般的电熨斗用合金丝做发热元件,合金丝电阻随温度t变化的关系如图12中实线①所示.由于环境温度以及熨烫的衣服厚度、干湿等情况不同,熨斗的散热功率不同,因而熨斗的温度可能会在较大的范围内波动,易损坏衣物.有一种用主要成分为BaTiO3,被称为“PTC”的特殊材料做发热元件的电熨斗,具有升温快、能自动控制温度的特点.PTC材料的电阻随温度变化的关系如图12中实线②所示.图12根据图线分析:(1)为什么处于冷态的PTC熨斗刚通电时比普遍电熨斗升温快?(2)通电一段时间后电熨斗温度t自动地稳定在______<t<______范围之内.11.青岛奥运会帆船赛场采用风力发电给蓄电池充电,为路灯提供电能.用光敏电阻作为传感器控制路灯电路的开关,实现自动控制.光敏电阻的阻值随照射光的强弱而变化,作为简化模型,可以近似认为,照射光较强(如白天)时电阻几乎为0:照射光较弱(如黑天)时电阻接近于无穷大.利用光敏电阻作为传感器,借助电磁开关,可以实现路灯自动在白天关闭,黑天打开.电磁开关的内部结构如图13所示.1、2两接线柱之间是励磁线圈,3、4两接线柱分别与弹簧片和触点连接.当励磁线圈中电流大于50 mA时,电磁铁吸合铁片,弹簧片和触点分离,3、4断开;电流小于50 mA时,3、4接通.励磁线圈中允许通过的最大电流为100 mA.图13(1)利用以下器材设计一个自动控制路灯的电路,画出电路原理图.光敏电阻R1,符号灯泡L,额定功率40 W,额定电压36 V ,符号保护电阻R2,符号电磁开关,符号蓄电池E,电压36 V,内阻很小;开关S,导线若干.(2)回答下列问题:①如果励磁线圈的电阻为200 Ω,励磁线圈允许加的最大电压为__________V,保护电阻R2的阻值范围为________Ω.②在有些应用电磁开关的场合,为了安全,往往需要在电磁铁吸合铁片时,接线柱3、4之间从断开变为接通.为此,电磁开关内部结构应如何改造?请结合本题中电磁开关内部结构图说明.答:________________________________________________________________________ ________________________________________________________________________.③任意举出一个其它的电磁铁应用的例子.答:________________________________________________________________________.第3节生活中的传感器第4节实验探究:简单的光控和温控电路答案课前预习练1.温度湿度气体光2.水位负载量水温布质洗涤粉3.硅板电子设备4.C [空调机根据温度调节工作状态,所以内部使用了温度传感器,故C正确.] 5.D [鼠标器中的传感器是红外线接收管,属于光传感器;火灾报警器中传感器是光电三极管,属于光传感器;测温仪用的是温度传感器;电子秤的敏感元件是应变片,是力传感器,D正确.] 6.A [遥控器发出红外线,电视中的传感器感知红外线,是红外线传感器,所以A选项正确.]课堂探究练1.见解析解析(1)冰箱内温度较高时,密封系统中的压强增大,盒体膨胀,膜盒 3通过小柱体带动弹簧片4,使动触点5与静触点6接触,控制压缩机自动开始工作,而在达到设定的温度时弹簧带动弹簧片4将触点5、6断开,使压缩机停止工作.(2)凸轮逆时针转动会加大连杆9对弹簧7的拉力,该拉力与弹性金属膜盒3共同控制弹簧片4的运动,而弹簧7上弹力的变化会改变设定的温度.2.见解析解析(1)开始煮饭时用手压下开关按钮,永磁体与感温磁体相吸触点接通,电热板通电加热;手松开后,由于永磁体与感温磁体的吸引,按钮不会恢复到图示状态.(2)煮饭时,水沸腾后锅内保持100℃不变,因为水的沸点为100℃,只要有水温度就不变.(3)水分被大米吸收后,锅底温度升高,当温度升至“居里点103℃”时,感温磁体失去磁性,在弹簧作用下,永磁体被弹开,触点分离,切断电源,从而停止加热.(4)如果用电饭锅烧水,水沸腾后,锅内保持100℃不变,温度低于“居里点103℃”电饭锅不能自动断电,只有水烧干后,温度升高到103℃才能自动断电.3.见解析解析将光敏电阻用黑纸包住使它不被光照亮,如果发光二极管不亮,则调节电位器R1,直到发光二极管发光为止.然后将包裹光敏电阻的黑纸打开,看它是否熄灭,如果此时发光二极管不熄灭,则再调节电位器.反复使光敏电阻遮光或见光,直到可以实现发光二极管在光敏电阻有光照时熄灭,无光照时发光为止.4.见解析解析只需将上题光控电路中的光敏电阻RG换成热敏电阻RT即可,用讯响器发声代表电加热器通电,电路如下图所示调试时:调试R1使RT的温度低于某一指定值时M741后面的电路接通,使RT的温度高于某一指定值时M741后面的电路断开.5.(1)常温下,上、下触点应是接触的,但温度过高时,由于双金属片上、下表面受热膨胀系数不同,上部金属膨胀大,下部金属膨胀小.则双金属片向下弯曲,使触点分离,从而切断电源,停止加热,温度降低后,双金属片恢复原状,重新接通电路加热,这样循环进行,起到自动控制温度的作用.(2)熨烫棉麻衣物和熨烫丝绸衣物需要设定不同的温度,此时可通过调温旋钮调节升降螺丝,升降螺丝带动弹性铜片升降,从而改变触点接触的位置,达到控制不同温度的目的.6.(1) (2)m+m0g,k) (3)m=U解析托盘的移动带动P1移动,使P1、P2间出现电势差,电势差的大小反映了托盘向下移动距离的大小,由于R为均匀的滑线电阻,则其阻值与长度成正比.(1)由力的平衡知识知m0g=kx1,解得x1=m0gk(2)放上重物重新平衡后m0g+mg=kx2解得x2=m+m0g,k)(3)由闭合电路欧姆定律知E=IR,由部分电路欧姆定律知U=IR串,由=,其中x为P1、P2间的距离,则x=x2-x1=mgk联立解得m=U方法总结分析传感器问题要注意四点(1)感受量分析要明确传感器所感受的物理量,如力、热、光、磁、声等.(2)输出信号分析明确传感器的敏感元件,分析它的输入信号及输出信号,以及输入信号与输出信号间的变化规律.(3)电路结构分析认真分析传感器所在的电路结构,在熟悉常用电子元件工作特点的基础上,分析电路输出信号与输入信号间的规律.(4)执行机构工作分析传感器的应用,不仅包含非电学量如何向电学量转化的过程,还包含根据所获得的信息控制执行机构进行工作的过程.课后巩固练1.B [光敏电阻的阻值随光照强度的增强而减小,开始时有光照射,光敏电阻的阻值较小,当手掌挡住部分光线时,光敏电阻的阻值增大,因为欧姆表的零刻度在表盘的右侧,所以欧姆表测电阻时,阻值越大,指针张角越小,所以选项B正确.] 2.D [当电梯门碰到人或其他障碍物时立即停止关门以防挤伤人,故为压力传感器.] 3.D [滑块随导弹一起做加速运动,向左偏离O点的距离为x,使左侧弹簧被压缩,右侧弹簧被拉长,则滑块所受合力为2kx,方向向右,故加速度方向向右.由牛顿第二定律得:2kx=ma,滑块加速度大小为:a=2kx/m,故选D.] 4.A [A、B接电磁继电器线圈,所以A、B应接信号电压,线圈随信号电压变化使电磁继电器相吸或释放,从而使C、D接通或断开,进而起到控制作用.故正确答案为A.]5.B 6.B [题目中半导体应能感知光照强度变化,并输出电信号,控制电路通断,所以利用了半导体的光敏性,故B正确.]C,由B=得I==2 A.→C,由B=得I==2 A.]8.B [小球下落的轨迹如右图所示,B处为绳子原长处,C处为小球重力与绳上拉力相等处,D处为小球下落的最低点,在F-t图中,0~t1小球在OB间下落,t1~t2小球在BD间下落,t2~t3小球由D回到B 处,t3~t4小球在BO间上升,而后下落至B点.由F-t图知,小球在t2时刻下落到最大距离,然后最大距离在逐渐减小,由以上分析知,小球的最大速度出现在C点,对应于t1~t2之间,A错,B对.小球动能最小出现在t2时刻或t3~t4间某时刻,C错误.t2和t5分别对应小球先后两次下落过程中经过最低点的时刻,速度大小为零,D错误.] 9.D [K闭合时传感器上恰好无示数,说明小球受竖直向上的电场力,且电场力大小等于重力.由楞次定律可判断磁场B正在增强,根据法拉第电磁感应定律E=n=U,又q=mg得=,故D正确.]10.(1)见解析(2)T6 T7解析(1)由于冷态时PTC材料电阻很小,故由P=知,其发热功率很大,所以升温很快.(2)在T6~T7之间,电熨斗放出的热量和产生的热量才有可能相等,达到热平衡状态,所以电熨斗温度t自动地稳定在T6<t<T7范围之内.11.(1)见解析(2)①20160~320②把触点从弹簧片右侧移到弹簧片左侧,保证当电磁铁吸合铁片时,3、4之间接通;不吸合时,3、4之间断开③电磁起重机解析(1)要使光敏电阻能够对电路进行控制,且有光照时路灯熄灭,光敏电阻应与1、2串联,3、4与路灯串联,则电路图如右图所示.(2)①由U=IR得励磁线圈允许加的最大电压Um=ImR=0.1×200V=20 V;依据允许通过励磁线圈的电流最大值和最小值计算得R2min ==Ω=160 Ω,R2max==Ω=320 Ω,因此保护电阻R2的阻值范围为160~320 Ω;②把触点从弹簧片右侧移到弹簧片左侧,保证当电磁铁吸合铁片时,3、4之间接通;不吸合时,3、4之间断开.③电磁起重机.。
传感器与检测技术第3章 传感器基本特性参考答案
第3章传感器基本特性一、单项选择题1、衡量传感器静态特性的指标不包括()。
A. 线性度B. 灵敏度C. 频域响应D. 重复性2、下列指标属于衡量传感器动态特性的评价指标的是()。
A. 时域响应B. 线性度C. 零点漂移D. 灵敏度3、一阶传感器输出达到稳态值的50%所需的时间是()。
A. 延迟时间B. 上升时间C. 峰值时间D. 响应时间4、一阶传感器输出达到稳态值的90%所需的时间是()。
A. 延迟时间B. 上升时间C. 峰值时间D. 响应时间5、传感器的下列指标全部属于静态特性的是()A.线性度、灵敏度、阻尼系数B.幅频特性、相频特性、稳态误差C.迟滞、重复性、漂移D.精度、时间常数、重复性6、传感器的下列指标全部属于动态特性的是()A.迟滞、灵敏度、阻尼系数B.幅频特性、相频特性C.重复性、漂移D.精度、时间常数、重复性7、不属于传感器静态特性指标的是()A.重复性 B.固有频率 C.灵敏度 D.漂移8、对于传感器的动态特性,下面哪种说法不正确()A.变面积式的电容传感器可看作零阶系统B.一阶传感器的截止频率是时间常数的倒数C.时间常数越大,一阶传感器的频率响应越好D.提高二阶传感器的固有频率,可减小动态误差和扩大频率响应范围9、属于传感器动态特性指标的是()A.重复性 B.固有频率 C.灵敏度 D.漂移10、无论二阶系统的阻尼比如何变化,当它受到的激振力频率等于系统固有频率时,该系统的位移与激振力之间的相位差必为()A. 0°B.90°C.180°D. 在0°和90°之间反复变化的值11、传感器的精度表征了给出值与( )相符合的程度。
A.估计值B.被测值C.相对值D.理论值12、传感器的静态特性,是指当传感器输入、输出不随( )变化时,其输出-输入的特性。
A.时间B.被测量C.环境D.地理位置13、非线性度是测量装置的输出和输入是否保持( )关系的一种度量。
传感器习题及答案第三章

第三章3-8 有一应变式测力传感器,弹性元件为实心圆柱,直径D=40mm 。
在圆柱轴向和周向各贴两片应变片(灵敏度系数s=2.),组成差动全桥电路,供桥电压为10v 。
设材料弹性模量E=2.1⨯1011pa ,泊松比υ=0.3。
试求测力传感器的灵敏度(该灵敏度用μv/kN 表示)。
解:设受压缩 F,轴向贴的应变片 R S R R ξ=∆=∆31 横向贴的应变片:SR R R μξ=∆=∆43设原电阻 4321R R R R === ,则受力F 后:11R R R ∆-= , 33R R R ∆-=, 22R R R ∆-= , 44R R R ∆-= 电桥输出电压变化: x U R R R R R R R R U ))((43214231+-=∆xxxURR R UR R R R R UR R R R R R 22)(21212122121∆+∆-≈∆+∆-∆+∆-=∆++∆-∆+∆-=xUS U U 2)1(ξ+-=∆∴Er FErFAF 22πσξπσ∆=∆=∆=∆=∆∴ 代入上式xUEr FSU U 22)1(π∆+-=∆∴测力传感器灵敏度 Er SU U FU K x22)1(π+=∆∆=)(101.2)(02.0)(1022)3.01(1122Pa m V ⨯⨯⨯⨯⨯+=π又因为: 218.91002.11m N Pa ⨯⨯=- 所以: )(8.9102.1101.202.0)(103.11112N V K ⨯⨯⨯⨯⨯⨯⨯=-πN V 10102.32103.1-⨯⨯⨯=N V 91089.41-⨯= KN V μ4189.0=3-10 一个二阶测试系统,受激励力F o sin ωt 作用,共振时测得振幅为20mm ,在0.8倍的共振频率时测得振幅为12mm ,求系统的阻尼系数ξ(提示,假定在0.8倍的共振频率时,阻尼项可忽略)。
解: 两阶系统22224)1(1)(211)(λξλλξλλλ+-=+-=j H j j H谐振峰 :20122=-ξξF (1)r f 8.0 时,1214)1(202220=-=+-λλξλF F (2))2()1( 得:122012122=--ξξλ)21(64.0218.08.0222ξλξλλ-=-⨯==r 代入上式61012)21(64.0122=---ξξξ即:66.482.36645924=+-ξξ0129.022,1=ξ 或 0.786 0.786 不符合要求,舍去。
现代传感技术第三章课后习题答案
思考题1.传感器一般包括哪些部分,各部分的作用是什么?答:1、敏感元件:直接感受被测量,以确定的关系输出某一物理量(包括电学量)。
2、转换元件:将敏感元件输出的非电量物理量转换为电学量(包括电路参数量)。
3、转换电路:将电路参数(如电阻、电容、电感)量转换成便于测量的电学量(如电压、电流、频率等)。
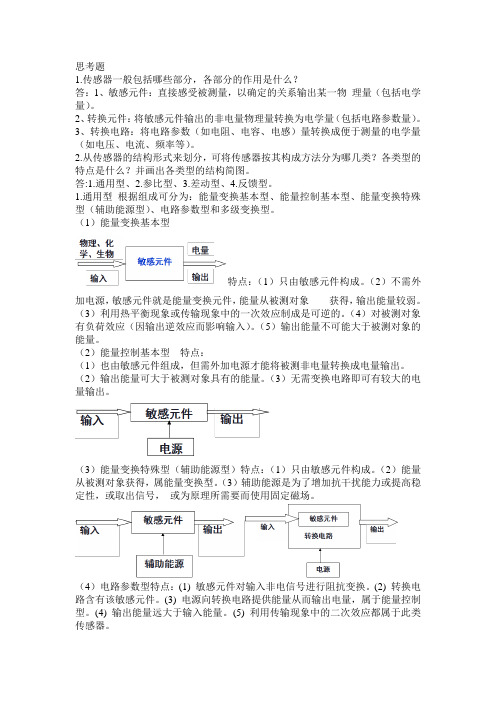
2.从传感器的结构形式来划分,可将传感器按其构成方法分为哪几类?各类型的特点是什么?并画出各类型的结构简图。
答:1.通用型、2.参比型、3.差动型、4.反馈型。
1.通用型根据组成可分为:能量变换基本型、能量控制基本型、能量变换特殊型(辅助能源型)、电路参数型和多级变换型。
(1)能量变换基本型特点:(1)只由敏感元件构成。
(2)不需外加电源,敏感元件就是能量变换元件,能量从被测对象获得,输出能量较弱。
(3)利用热平衡现象或传输现象中的一次效应制成是可逆的。
(4)对被测对象有负荷效应(因输出逆效应而影响输入)。
(5)输出能量不可能大于被测对象的能量。
(2)能量控制基本型特点:(1)也由敏感元件组成,但需外加电源才能将被测非电量转换成电量输出。
(2)输出能量可大于被测对象具有的能量。
(3)无需变换电路即可有较大的电量输出。
(3)能量变换特殊型(辅助能源型)特点:(1)只由敏感元件构成。
(2)能量从被测对象获得,属能量变换型。
(3)辅助能源是为了增加抗干扰能力或提高稳定性,或取出信号,或为原理所需要而使用固定磁场。
(4)电路参数型特点:(1) 敏感元件对输入非电信号进行阻抗变换。
(2) 转换电路含有该敏感元件。
(3) 电源向转换电路提供能量从而输出电量,属于能量控制型。
(4) 输出能量远大于输入能量。
(5) 利用传输现象中的二次效应都属于此类传感器。
5)多级变换型2.参比补偿型特点:(1) 采用两个(或两个以上)性能完全相同的敏感元件。
其中一个感受被测量和环境量,另一个只感受环境量作补偿用。
(2) 两个敏感元件同时接到电桥的相邻两臂或反串。
第三章 电容式传感器

C d 2 C0 d0 非线性误差为: d 3 2 d0 d r 100% 100% d d0 d0
减小
C C0 A 2 2 2 灵敏度: S d d0 d0
提高一倍
18
差动式比单极式灵敏度提高一倍,且非线性误差大为减 小。由于结构上的对称性,它还能有效地补偿温度变化所 造成的误差。
弹性体
绝缘材料 定极板
极板支架
动极板
36
在弹性钢体上高度相同处打一排孔,在孔内形成一排平行 的平板电容,当称重时,钢体上端面受力,圆孔变形,每
个孔中的电容极板间隙变小,其电容相应增大。由于在电
路上各电容是并联的, 因而输出反映的结果 是平均作用力的变化, 测量误差大大减小 F
(误差平均效应)
电容式称重传感器
T1 T2 UA U 1 ,U B U1 T1 T2 T1 T2
UA、UB—A点和B点的矩形脉冲的直流分量; T1、T2 —C1和C2充电至Ur的所需时间; U1—触发器输出的高电位。
29
C1、C2的充电时间T1、T2为:
U1 T1 R1C1 ln U1 U r U1 T2 R2C2 ln U1 U r
0 A
dg
g
d0
云母片的相对介电常数是空气的7倍,其击穿电压不小于 1000 kV/mm,而空气的仅为3kV/mm。 有了云母片,极板间起始距离可大大减小,同时传感器的输 出特性的线性度得到改善。
12
13
14பைடு நூலகம்
差动电容式传感器
定极板 动极板 C1 d1 C2 d2 定极板
15
初始位置时,
3
电容式传感器可分为变极距型、变面积型和变介质型三 种类型。
传感器与检测技术第3章 传感器基本特性参考答案
第3章传感器基本特性一、单项选择题1、衡量传感器静态特性的指标不包括()。
A. 线性度B. 灵敏度C. 频域响应D. 重复性2、下列指标属于衡量传感器动态特性的评价指标的是()。
A. 时域响应B. 线性度C. 零点漂移D. 灵敏度3、一阶传感器输出达到稳态值的50%所需的时间是()。
A. 延迟时间B. 上升时间C. 峰值时间D. 响应时间4、一阶传感器输出达到稳态值的90%所需的时间是()。
A. 延迟时间B. 上升时间C. 峰值时间D. 响应时间5、传感器的下列指标全部属于静态特性的是()A.线性度、灵敏度、阻尼系数B.幅频特性、相频特性、稳态误差C.迟滞、重复性、漂移D.精度、时间常数、重复性6、传感器的下列指标全部属于动态特性的是()A.迟滞、灵敏度、阻尼系数B.幅频特性、相频特性C.重复性、漂移D.精度、时间常数、重复性7、不属于传感器静态特性指标的是()A.重复性B.固有频率C.灵敏度D.漂移8、对于传感器的动态特性,下面哪种说法不正确()A.变面积式的电容传感器可看作零阶系统B.一阶传感器的截止频率是时间常数的倒数C.时间常数越大,一阶传感器的频率响应越好D.提高二阶传感器的固有频率,可减小动态误差和扩大频率响应范围9、属于传感器动态特性指标的是()A.重复性B.固有频率C.灵敏度D.漂移10、无论二阶系统的阻尼比如何变化,当它受到的激振力频率等于系统固有频率时,该系统的位移与激振力之间的相位差必为()A. 0°°° D. 在0°和90°之间反复变化的值11、传感器的精度表征了给出值与( )相符合的程度。
A.估计值B.被测值C.相对值D.理论值12、传感器的静态特性,是指当传感器输入、输出不随( )变化时,其输出-输入的特性。
A.时间B.被测量C.环境D.地理位置13、非线性度是测量装置的输出和输入是否保持( )关系的一种度量。
A.相等B.相似C.理想比例D.近似比例14、回程误差表明的是在( )期间输出-输入特性曲线不重合的程度。
第3章应变式传感器
(c)当试件材料变化时,只需要调整1和2的长度。
23
3.4 测量电路
一.测量电路的作用、组成及分类 1.作用 (1)转化功能:把电阻的变化转化成电压或电流的变化。 (2)放大功能:机械应变一般很小,对应的电阻变化也很小, 就需要放大。 2. 组成 (1)转化功能对应转化电路,由电桥电路实现。 (2)放大功能对应放大电路,由集成运放实现。 本节只讨论转化电路。 3. 电桥电路的分类 根据电源的不同可分为:直流电桥和交流电桥。
说明:
E
(a)当R1和RB变化较小时,A可看成常数。
(b)当R1和RB变化较大时,A可看成常数会带来非线性误差(参 见3.4节)。
20
U 0 A( R1R4 RB R3 )
④补偿电路的工作原理 (a)试件无应变 t=t0时, 令R1=RB=R3=R4=R0 , 则 Uo=A(R1R4-RBR3)=0 t=t0+△t时, ΔRt1=ΔRtB=ΔRt,R1=RB=R0+ΔRt,则 Uo=0 (b)试件存在应变ε R1存在电阻变化:△R1′=KεR0 t=t0时, RB=R3=R4=R0,R1=R0+△R1′=R0+KεR0 则 Uo=AR02K ε∝ ε t=t0+△t时, R1=R0+ KεR0 +ΔRt,RB=R0+ΔRt, 则 Uo=AR02Kε∝ ε 结论:经过线路补偿,输出只与ε成正比,而与t无关。
17
自身因素引起的电阻相对变化:ΔRt /R0=α0Δt 外界因素引起的电阻相对变化: ΔRβ/R0= K0 (βg-βs)Δt
(3)总的温度误差 总电阻相对变化量:
Rt R R R0 R0 R0
[ 0 K 0 ( g s )]t
【 汽车传感器结构原理及典型故障案例】1_第三章 掌握速度和减速度传感器的

1)关闭点火开关。
2)将车支起,使四个轮胎离地10cm左右。
3)拔下轮速传感器的导线插接器插头并用导线将线束插头与轮 速传感器插头的电源端子相连。
4)将万用表(用交流电压档)的两表笔分别搭接在轮速传感器的 信号输出端子(注意+、-极性),测量传感器的输出电压。
5)打开点火开关,用手转动车轮,万用表应显示交流电压在7~ 14V范围。
二、霍尔效应式轮速传感器
1.结构原理
图3-6 霍尔效应式轮速传感器的磁路 a)磁场较弱时 b)磁场较强时
2.检测方法
1)关闭点火开关。 2)将车支起,使四个轮胎离地10cm左右。 3)拔下轮速传感器的导线插接器插头并用导线将线束插头与轮 速传感器插头的电源端子相连。 4)将万用表(用交流电压档)的两表笔分别搭接在轮速传感器的 信号输出端子(注意+、-极性),测量传感器的输出电压。 5)打开点火开关,用手转动车轮,万用表应显示交流电压在7~ 14V范围。
1)检测传感器的电源电压。
2)检测传感器线束的导通性。
图3-15 检测传感器线束的导通性
1.结构原理 2.检测方法
三、光敏式车速传感器
1.结构原理
图3-16 光敏式车速传感器 a)结构示意图 b)实物图
1.结构原理
图3-17 光敏式车速传感器的工作原理 1—遮光板 2—光敏晶体管
1.结构原理
3.检测举例
图3-5 轮速传感器与ECU的连接电路
1)检测传感器的信号电压。
表3-1 各轮速传感器信号电压的标准值
2)检测传感器的电阻值。
表3-2 各轮速传感器电阻值的标准值
3)检测传感器与齿圈的气隙。
表3-3 轮速传感器与齿圈的间隙
4)检测传感器线束的电阻值。