基于AD2S1200的旋变接口电路设计及信号处理
ADS1200解码芯片测试报告

1.测试项目及名称旋转变压器解码芯片AD2S1200功能测试。
2.试验目的和要求1)芯片功能的测试2)对芯片编程后的测试3)芯片外围电路(CAN通讯)测试3.被测样品的型号、名称及主要性能指标本试验的被测电路板为专门的AD2S1200外围电路的电路板,集成了解码外围电路,主控芯片及CAN通讯电路。
4.测试方法、步骤及测试结果1)电路及线束的连接a)正确连接被测板的电源,给被测供12V电压,待板上电源指示灯亮,显示正常。
b)正确连接旋转变压器与被测板,使六个相应的旋变信号正确接入板内。
c)连接CAN通讯线与被测板的通讯电路,使之能正常通讯2)根据AD2S1200的通讯时序以及外围电路,正确地编写程序,烧入主控芯片,程序明细见附件1.3)硬件电路的调试a) 测量被测板上电源正负极是否短路,正常上电,观察电源批示灯是否点亮。
如点,则进行下一步测试。
b) 将旋转变压器调整到零位置,即输出结果COSIN信号输出为最大值时,而SIN信号输出为0。
c) 给被测板供12V电源,待指示灯亮后,测量被测板上旋变输入信号是否正常输入解码芯片。
4) 程序代码的编写与测试a) 连接仿真器,编写简单代码对DSP的输入输出进行测试,验证DSP工作正常及基础代码程序是否正常。
b) 按照DSP与AD2S1200的通讯时序进行程序代码的编写,同时编写CAN通讯部分的代码,以便验证测试结果。
5)功能测试步骤a) 连接CAN通讯工具,观察是否可以正常通讯,如果通讯正常,正常启动被测板,利用波形记录仪观察DSP与解码芯片通讯的各时序信号是否正确。
b) 将旋转变压器分别旋转到0,45,90,135,180,225,270,315度观察上位机数据解码回来的数据,验证结果的正确性。
测试结果1 当旋转变压器的角度为0度时,测试的芯片输入波形,上位机结果及通讯时序各信号波形如下。
波形说明:a)芯片输入波形中,红色为sin输入信号,黄色为cos输入信号;b)时序信号输入波形中,从上至下信号分别为:DATA(紫色),SCLK(红色),SAMPLE(灰色),CS(蓝色)。
基于AD2S1200的旋转变压器解码电路的设计
⑥
2 1 Si eh E gg 0 2 c T c. nr. .
基 于 A 2 10 D S 20的旋 转 变 压 器 解码 电路 的设计
储 海 燕 许 刚
( 安 航 空 学 院电 气 工 程 系 , 安 7 07 ) 西 西 10 7
摘
要
旋转变压器是一种高分辨率的角度传感器 。系统设 计一种 以 A 2 10 D S 20为核 心 的数 字解码 电路 系统。 它以振荡 电
路产生的正弦波 电压信号作为旋变的激励信 号, 加上相关 的外 围电路 , 构成 了旋 转变压器一 数字 转换 器 , 解算 出旋 变 的轴 角 0
和旋 变的转速 n 并在此基础上 , 析产 生角度解算误差 的各种 因素 。 : 分
关键词 旋转变压器 A 2 10 D S20 解码器
中图法分类号
T 9 9 3 N 1. ;
文献标 志码
A
旋转 变压 器用 于 运动 伺 服 控制 系统 中 , 自动 是
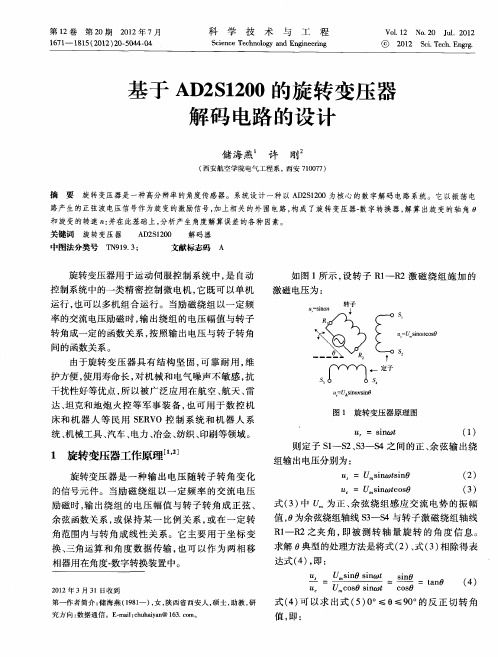
如图 1 示 , 转子 R一R 所 设 1 2激 磁 绕 组 施 加 的
激磁 电压 为 :
控制系统 中的一类精密控制微 电机, 它既可以单机
运行 , 可 以多机 组 合 运行 。当励 磁 绕 组 以一 定 频 也
s
r ^ 、
U
s
3s d
一定 子
s mwtiO sn
图 1 旋 转 变 压 器 原 理 图
统、 机械工具、 汽车 、 电力 、 冶金、 纺织 、 印刷等领域 。
u ,=sn t工作原理 2 . J
旋 转变 压 器 是 一 种 输 出 电 压 随 转 子 转 角 变 化 的信号 元 件 。 当励 磁 绕 组 以 一 定 频 率 的交 流 电压 励 磁 时 , 出绕 组 的 电压 幅值 与 转 子 转 角 成 正 弦 、 输 余 弦 函数关 系 , 保 持 某 一 比例 关 系 , 在 一 定 转 或 或 角范 围 内 与转 角 成 线 性 关 系 。它 主 要 用 于 坐标 变 换、 三角运 算 和 角 度 数 据 传 输 , 可 以作 为 两 相 移 也 相器 用在 角度 . 字转换 装置 中。 数
基于FPGA的双通道多对极旋转变压器的新型测角系统设计_朱其新

图 5 旋变粗、精通道输出的已调理差分正、余弦信号
3 串行通信模式
AD2S1210 可采用 4 线串行接口进行通信,通信 波特率最高可达到 25 MHz,通过配置 AD2S1210 芯 片的 A0、Al 引脚,使芯片在配置模式下工作,在该 模式下可对芯片寄存器进行编程,以设置 AD2S1210 的激励频率、分辨率等信息,写入到寄存器中的数 据可在此配置模式下进行回读,位置寄存器中的数 据也可在此模式下读取。
中图分类号: TP216; TM383. 2
文献标志码: A
文章编号: 1001-6848( 2016) 07-0041-05
DOI:10.15934/ki.micromotors.2016.07.010
Design of Novel Angle Measurement System for Two-channel
第 49 ORS
Vol. 49. No. 7 Jul. 2016
基于 FPGA 的双通道多对极旋转变压器的 新型测角系统设计
朱其新1,2 ,张 正2 ,朱永红3 ,刘红俐1 ,张国平4
( 1. 苏州科技学院 机械工程学院,江苏 苏州 215009; 2. 华东交通大学 电气与电子工程学院,南昌 330013; 3. 景德镇陶瓷学院 机电工程学院,江西 景德镇 333001; 4. 深圳市大族电机科技有限公司,广东 深圳 518058)
作者简介: 朱其新( 1971) ,博士,教授,研究方向为伺服控制与网络控制。 张 正( 1990) ,硕士,研究方向为电机控制。 刘红俐( 1972) ,硕士,副教授,研究方向为机电控制技术。 朱永红( 1963) ,博士,教授,研究方向为网络控制与信息融合技术。 张国平( 1978) ,硕士,高级工程师,研究方向为电机控制与电力电子技术。
旋转变压器信号处理与设计

Because the special Resolver-to-Digital converter generally is very expensive,we designed a new decode method using DSP chip to reduce cost. this paper adopt oversampling technique to improve the resolution.The oversampling technique’s theory and implementation steps had been particularly presented.The realization of FIR digital filter and arctg function were the key points of this method.By the use of MATLAB, we designed and proved the FIR digital filter.on the other hand,we propose a fast and high precision calculation of arctg function,then expounded the theory and the realization steps.After these presentations,lastly this paper designed the hardware and software of the DSP decoding system.
旋转变压器解码电路设计
2
Байду номын сангаас 2013 届本科毕业设计论文
目录
第一章 旋转变压器..................................................................................................5
1.2.1 环形变压器式旋转变压器................................................................................... 5 1.2.2 磁阻式旋转变压器............................................................................................... 6 1.3 正余弦旋转变压器的工作原理...................................................................................... 6 1.4 旋转变压器与光学编码器比较...................................................................................... 8 1.5 旋转变压器的应用.......................................................................................................... 9
第三章 控制器 STM32F103RBT6........................................................................ 14
旋转变压器信号处理的分析与研究

旋转变压器信号处理的分析与研究【摘要】在现代工业控制中,人们对运动对象的精度和速度要求越来越高,伺服控制系统因其稳定性好、精度高、动态响应快、抗干扰能力强等特点,应用越来越广泛。
旋转变压器具有结构坚固、维护方便、抗扰能力强、使用可靠等诸多优点,它能测量出旋转机构的绝对位置信息,在伺服控制系统中得到了广泛的应用。
本文介绍了旋转变压器的工作原理,针对它的信号处理问题,首先设计了基于专用芯片的旋转变压器信号处理方法,给出了硬件电路设计和软件设计,实际测试了伺服控制系统中的电机转子的速度和绝对位置,对测试结果进行了分析。
【关键词】伺服控制系统;旋转变压器;信号处理;绝对位置;观测器1.伺服控制系统介绍伺服控制系统是输出量能精确地跟随或者复现输入变量的一类自动控制系统。
在现代工业控制中,大多数工业设备都需要实现高精度、稳定地控制。
一般情况下,伺服系统由伺服电动机、功率驱动器、控制器和传感器四大部分组成。
对伺服系统,应具有稳定性好、精度高、动态响应快、抗干扰能力强等基本的要求。
而要满足上述最基本的要求,伺服系统最基本的特征应该有:系统中有高精度的传感器,能准确地给出输出量和状态的电信号;功率驱动器及控制系统都必须是可逆的;有足够大的调速范围及足够强的低速带载能力;快速的响应能力和较强的抗干扰能力。
2.旋转变压器的工作原理旋转变压器是一种能够转动的变压器。
早期的旋转变压器(下文中出现的“旋变”是“旋转变压器”的简称)主要用于计算机解答装置,是构成模拟计算机的主要组成部分。
旋转变压器的输出根据转子的转角,输出特定函数变化的电气信号,如正弦、余弦、线性信号等,对变压器的次级绕组进行特殊设计,也可以产生特殊函数的电气信号。
旋转变压器的励磁绕组由单相电源供电,电压为励磁绕组S1~S2通入励磁电流后产生脉振磁场,在次级的输出绕组中产生感生电动势。
当旋变的转子转动时,由于励磁绕组和次级输出绕组的相对位置发生变化,因而次级输出绕组感生的电动势也发生变化,在结构上次级输出的两相绕组在空间上成正交的90°电角度,故两相输出电压为:其中,U1m—励磁电压的幅值,ω—励磁电压的角频率,U2s—正弦相的输出电压,U2c—余弦相的输出电压,U2m—次级输出电压的幅值;θ—旋变转子的转角。
基于AD2S1210的旋变解码电路设计
基于AD2S1210的旋变解码电路设计刘芸邑;郑婕;李燕;田桂平;魏伟;陈洁【摘要】This paper introduces a resolver decoding circuit based on the position detection of a step-stare panoramic imaging platform. Through the use of AD2S1210(revolving transformer/digital converting IC produced by ADI), to decode the resolver J78XFS009, a decoding circuit is designed. The design includes the basic working of ADS2S1210, the interface circuit and the connecting circuit between the micro-controller and resolver and so on. The whole circuit has the advantages of simple structure, high reliability, working stability, high precision and better noise immunity, etc. It can be used under harsh environments, so it has high value of practical use. The experimental results show that the circuit can detect the position signals of the DC motor accurately, so it can contribute to achieve a more precise closed loop control of DC motors.%介绍了在步进凝视扫描成像平台的位置检测中,传感器的解码电路。
ad2s1210旋变励磁驱动电路 差分

ad2s1210旋变励磁驱动电路差分下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by the editor. I hope that after you download them, they can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!AD2S1210旋变励磁驱动电路差分引言在工业控制系统中,旋变(Resolver)是一种常用的传感器,用于测量旋转角度和速度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
12位绝对位置信息和带符号的 11 位速度信息,精确
基于 AD2S1200 的旋变接口电路设计及信号处理
度为±11 r/min;③具有可编程正弦波晶振器;④同时
具有串行通讯接口和并行输出接口;⑤励磁频率为
10 kHz,12 kHz,15 kHz,20 kHz 可编程。
该芯片所需外围电路简单,适用于各种无刷旋
1引言
在常用的光栅编码器、霍尔传感器和旋转变压 器(简称旋变)等转子位置传感器中,旋变抗冲击震 动和温度湿度变化的能力很强,适用于工作环境恶 劣的场合。但是,旋变输出的是模拟信号[1],为了将模 拟信号变换成表示角度的数字信号,以前往往采用 模拟开关、采样/保持、A/D 转换器等组成转换电路。 近年来,已研制出能将旋变输出的交流信号直接变 换成数字信号的器件,即旋变/数字转换器件。通过 旋变/数字转换器配合使用就能够产生转子的绝对 位置信息。位置传感器检测技术的发展极大地提高 了交流电机调速系统的动态响应性能和定位精度。 AD2S1200 便是一款性价比较高的芯片。从应用者角 度介绍了旋变和AD2S1200 的基本原理和功能特性, 并利用该芯片设计了用于旋变位置信号测量的外围 接口电路,最后介绍了绝对位置信号在 DSP 中的检 测和处理过程。
值 A(n- 1),计算两次值的偏差绝对值 deltaA=ABS [A(n)- A(n- 1)];
(3)步骤 3 判断:deltaA<=deltaMAX 且 deltaA>= deltaMIN,则 A (n)有 效 ; deltaA >deltaMAX 或 者
200 !s 采样一次,设定 deltaMAX 为当前电机给定速 度 ωref 在一个采样 周 期 内 角 度 变 化 值 的 两 倍 ,即 deltaMAX=2ωrefTs;设定 deltaMIN 为当前电机给定速 度 ωref 在一个采样周期内角度的变化值的 1/4,即 deltaMIN=0.25ωrefTs。转子数字角度经中位值滤波和微 分限幅补值处理后,消除了由干扰引起的角度数值突
(Hunan University,Changsha 410082,China) Abstr act: The revolver digital converter AD2S1200 is used to transform analog signals of revolver to digital signals for the purpose of digital siginal processing.The basic principle of the resolver is introduced.The interface circuit for resolver,as well as the interface circuit between AD2S1200 and TMS320F2808 DSP controller are designed.A stronger error-tolerant processing method of the position signal is proposed.The expetiment result shows that the design method is featured of high precision and reliability,good anti-jamming capabilities,and can completely meet high-speed motor control system. Keywor ds: transformer;interface;position sensor / revolver;position signal Foundation Pr oject: Supported by Hunan Province Key Project of Science and Technology (No.2006GK1002)
信号从图 2 所示 AD2S1200 的 EXC+和 EXC- 输出,
经过差分放大器后电压峰-峰值变为 8.2×1.575=
12.9 V,该电压作为旋变的初级励磁电压,而次级输
出电压的峰-峰值为:
Upp=12.9×0.286=3.69 V
(2)
旋变的次级输出信号 uNs1 和 uNs3,uNs2 和 uNs4 经滤
由于存在干扰,信号经过 AD2S1200 解码出来 的数字角位置信号与实际电机轴角不一定吻合,旋 变解码芯片会有丢脉冲的现象,进而影响到转子角 度的精确测量。从 CCS2000 软件的观测窗口可以看 到,在角度测量斜坡线上会出现数值突变的情况,如 图 5a 所示。
图 5 故障点处理前后的角度斜坡线
为克服角度测量误差[4],系统采用中位值滤波和 微分限幅补值对位置信号进行处理。实现中位值滤 波方法为:DSP 每隔 5 $s 连续读取位置角 7 次,7 次 采样值按大小排列,取中间第 4 次值作为本次的有 效值。该方法能有效克服由偶然因素引起的波动干 扰,但不能完全消除干扰。因此,对中位值滤波后,再 进一步作微分限幅补值处理,处理算法如下:
中图分类号: TM46; TP334.7
文献标识码: A
文章编号: 1000- 100X(2008)08- 0068- 03
Inter face Cir cuit Design of Resolver and Signal Pr ocessing based on AD2S1200
LUO De-rong, ZHOU Cheng, HUANG Ke-yuan, WANG Yao-nan
理。介绍了旋转变压器的基本原理,设计了 AD2S1200 与旋转变压器及 TMS320F2808 型 DSP 的接口电路,并提出了
一种容错性较强的位置信号数字处理方法。实验证明,该设计方法精度高,可靠性好,抗干扰能力强,完全能够满足
高速电机控制系统的要求。
关键词: 变压器;接口;位置传感器 / 旋转变压器;位置信号
(1)
式中:E0 为励磁最大幅值;ω1 为励磁角频率;K 为旋变的变
比;θ1 为转子旋转角度。
3 AD2S1200 接口电路设计
3.1 AD2S1200 功能特性
AD2S1200 是一款旋变/数字转换芯片,其主要
工作特性和参数为:①(5±5%)V单电源供电;②12位
分辨率的实时输出最高跟踪速率为 1 000 r/s,输出
[1] 陈 慧,马跃强,王 磊.旋转变压器位置检测在 EPS 中 的应用[J].传感器与微系统,2006,25(4):70- 71.
[2] 姜燕平.旋转变压器原理及其应用[J].电气时代,2005, (10):98- 99.
变输出信号的数摸转换,抗干扰能力强,而且功能丰
富,性价比较高。
3.2 模拟接口,它所需的
励磁电压范围为 3~7 V,初、次级电压比为 0.286,而
AD2S1200 输出的励磁信号峰-峰值为 8.2 V,接收的
正余弦信号峰-峰值为(3.6±10%)V,所以励磁电压
图 3 AD2S1200 与 DSP 接口框图
AD2S1200 的 3 线式串行总线引脚为 RD,SCLK 和 SO,SCLK 与 DB10,SO 与 DB11 引脚复用,串行 输出频率最高可达 25 MHz。当 SOE 置低电平时,
图 4 串行通讯时序图
4 信号处理及实验结果
实验电机参数 :额 定 转 速 ne=6 000 r/min,功 率P=42 kW,极对数 p=2;PWM 采样频率 fsam=5 kHz; 旋 变 励 磁 信 号 频 率 fm =10 kHz, 有 效 值 4.6 V; AD2S1200 和 DSP 的串口通讯波特率取为 4 M。
究方向为电力电子与电力传动等。
68
在一定转角范围内与转角成线性关系[2]。旋变主要用 于坐标变换、三角运算和角度数据传输,亦可作为两 相移相器用在角度-数字转换装置中。
如图 1 所示,旋变的初级励磁绕组 Np1,Np2 和二 相正交的次级感应绕组 Ns1 和 Ns3,Ns2 和 Ns4 同在定 子侧,转子侧是与初级绕组和次级绕组磁通耦合的 磁阻转子。
deltaA<deltaMIN,则本次值无 效 ,A(n)=A(n - 1)+ deltaA(n- 1)。
变,如图 5b 所示。图 6 示出实验波形,实验给定转速 为 6 000 r/min,经检测电动机的转速波动 "n≤0.05%。
图 6 实验波形图
5结论
参考文献
旋 变/数 字 转 换 芯 片 AD2S1200 与 DSP 芯 片 TMS320F2808 构成了高精度位置检测电路,其外围 接口电路简洁,通过对转子位置进行合理的数字处 理,能够实现转子位置转速的精确测量。实验证明, 设计的接口电路和数字处理方法简单,精度高,可靠 性好,抗干扰能力强,完全能够满足高速电机控制系 统的要求。
(1)步骤 1 根据实际测试和经验,确定相邻两 69
第 42 卷第 8 期 2008 年 8 月
电力电子技术 Power Electronics
Vol.42, No.8 August, 2008
次采样允许的最大偏差 deltaMAX 和最小偏差值
系统的角度采样在每个 PWM 周期都进行,每
deltaMIN; (2)步骤 2 读取本次采样值 A(n)和上次采样
2 旋转变压器原理
旋变是一种输出电压随转子转角变化的信号元 件。当励磁绕组以一定频率的交流电压励磁时,输出 绕组的电压幅值与转子转角成正弦、余弦函数关系,
基金项目: 湖南省科技计划重大项目( 2006GK1002) 定稿日期: 2008- 05- 12 作者简介: 罗德荣( 1968- ) , 男, 湖南望城人, 副教授。研
第 42 卷第 8 期 2008 年 8 月
电力电子技术 Power Electronics
Vol.42, No.8 August, 2008