现代控制理论 3-3 线性系统的可观性 3-4 可控可观标准型
(完整word版)现代控制理论习题解答(第三章)
第三章 线性控制系统的能控性和能观性01010( 1) A10 1B( 2) A 0 0 1 ,B 011024311113 10 1 1( 3) A0 10 1 0 3 0 , B00 ( 4) AB0 0 11 001211【解】:(1)11U c B AB 1 1, rankU c n 2 ,所以系统完全能控。
c 0 1 c(2)10 0 1 2U c B AB A 2B1 1 11 1 17前三列已经可使 rankU c n 3 ,所以系统完全能控(后续列元素不必计算) 。
(3)A 为约旦标准型, 且第一个约旦块对应的B 阵最后一行元素全为零, 所以系统不完全 能控。
(4)A 阵为约旦标准型的特殊结构特征, 所以不能用常规标准型的判别方法判系统的能控 性。
同一特征值对应着多个约旦块,只要是单输入系统,一定是不完全能控的。
可以求一下能控判别阵。
1213 1223B AB A 2B A 3B2 3 U c1 1 12 13 1 11 12 31111rankU c 2 ,所以系统不完全能控。
3 1110 10 0 x0 3 0x 0 0ux0 01x 0u (1)0 0 12(2)61161101yxy10 0x1 10解】:1)311 已知 A 0 30,B0 001220 0 D CB CAB CA 2B 0 0 前两列已经使 rank D CBCAB110 1 0 00 , C ,D1 1 0 0 031112CA B m2, 所以系统输出能控。
(2) 系统为能控标准型,所以状态完全能控。
又因输出矩阵 状态维数 n ,所以状态能控则输出必然能控。
C 满秩,且输出维数 m 小于1 0x0 01xx1 1 (1)2 43 ; (2) 1 x 0;011y1 1xyx12 12 1 0 4 0 0x0 20xx4 0x(3);(4)0 030 1y0 1 1x y11 4x解】:1)已知 A01 00 242-3-3 判断下列系统的能观性。
第三章 线性控制系统的能控性和能观性PPT课件
.
1
在现代控制理论中,能控性和能观性是两个重 要的概念,是卡尔曼(Kalman)在1960年首先提出 来的,它是最优控制和最优估计的设计基础。
现代控制理论是建立在用状态空间描述的基 础上的。状态方程描述了输入u(t)引起状态x(t)的 变化过程;输出方程则描述了由状态变化引起的输 出y(t)的变化。
可以看出,系统中某一状态的能控和系统的 状态完全能控在含义上是不同的。
.
7
几点说明:
1) 在线性定常系统中,为简便计,可以假定初始 时刻t0=0,初始状态为x(0),而任意终端状态就指 定为零状态,即 x(tf )0
2) 也可以假定x(t0)=0,而x(tf)为任意终端状态, 换句话说,若存在一个无约束控制作用u(t),在 有限时间[t0, tf]能将x(t)由零状态驱动到任意x(tf)。 在这种情况下,称为状态的能达性。
.
13
b b 1b 2b n T
为简明起见,下面举三个具有上述类型的二阶 系统,对能控性加以剖析。
x 0 1 0 2 x b 0 2 u ; yc1 c2x
(3-3)
x 0 1 1 1 x b 0 2 u; yc1 c2x
(3-4)
x 0 1 1 1 x b 0 1 u; yc1 c2x
具有约旦标准型系统矩阵的单输入系统,状态
方程为
x Λ b xu
(3-1)
或
x J b xu
(3-2)
1
0
2
Λ
3
0
n
12 3 n 即n个根互异
.
12
1 1
1 1
0
0
1
1
m 1
0
线性系统的可控性和可观性

第四章 线性系统的可控性和可观性§4-1 问题的提出经典控制理论中用传递函数描述系统的输入—输出特性,输出量即被控量,只要系统是因果系统并且是稳定的,输出量便可以受控,且输出量总是可以被测量的,因而不需要提出可控性和可观性的概念。
现代控制理论是建立在用状态空间法描述系统的基础上的。
状态方程描述输入)(t u 引起状态)(t x 的变化过程;输出方程描述由状态变化所引起的输出)(t y 的变化。
可控性和可观性正是定性地分别描述输入)(t u 对状态)(t x 的控制能力,输出)(t y 对状态)(t x 的反映能力。
它们分别回答:“输入能否控制状态的变化”——可控性 “状态的变化能否由输出反映出来”——可观性可控性和可观性是卡尔曼(Kalman )在1960年首先提出来的。
可控性和可观性的概念在现代控制理论中无论是理论上还是实践上都是非常重要的。
例如:在最优控制问题中,其任务是寻找输入)(t u ,使状态达到预期的轨线。
就定常系统而言,如果系统的状态不受控于输入)(t u ,当然就无法实现最优控制。
另外,为了改善系统的品质,在工程上常用状态变量作为反馈信息。
可是状态)(t x 的值通常是难以测取的,往往需要从测量到的)(t y 中估计出状态)(t x ;如果输出)(t y 不能完全反映系统的状态)(t x ,那么就无法实现对状态的估计。
状态空间表达式是对系统的一种完全的描述。
判别系统的可控性和可观性的主要依据就是状态空间表达式。
【例如】(1)u x x⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=202001 []x y 01=分析:上述动态方程写成方程组形式:⎪⎩⎪⎨⎧=+==1221122xy u x x x x 从状态方程来看,输入u 不能控制状态变量1x ,所以状态变量1x 是不可控的;从输出方程看,输出y 不能反映状态变量2x ,所以状态变量2x 是不能观测的。
即状态变量1x 不可控、可观测;状态变量2x 可控、不可观测。
现代控制理论-线性控制系统的能控性与能观性例题精选全文完整版
如果线性定常系统: y Cx 是状态不完全能控的, 它的能控性判别矩阵的秩
rankM n1 n
则存在非奇异变换:x Rcxˆ
将状态空间描述变换为:
xˆ y
Aˆ xˆ Cˆ xˆ
Bˆ u
n1 n n1
其中:
xˆ
xˆ1
xˆ
2
n1
n n1
Aˆ
R c1AR c
Aˆ 11 0
3.6.1 线性系统的对偶关系
线性系统1、2如下:
1:yx 11
A1x1 C1x1
B1u1
2:
x 2 y 2
A2x2 C2x2
B2u2
如果满足如下关系
A2 A1T , B2 C1T , C2 B1T
则称两系统是互为对偶的.
u1(t) B
x1(t)
x1(t)
++
∫
y1(t) C
A
y2(t) BT
0
A 0 1 0 , b 0, c 1 1 1
1 4 3
1
解: 能控性矩阵
0 1 4
M b Ab A2b 0 0
0
1 3 8
rankM 2 n1 dim A n 3 不能控
构造变换矩阵
0 1 0 Rc 0 0 1
1 3 0
✓与前2个列向量 线性无关; ✓尽可能简单
结构分解
u
co
y
co
依据能控能观 性,将系统分解
co
为四个子系统
co
x Ax Bu
y Cx Du
特殊的线性变换
x xTco xTco xTco xTco
分解步骤:
1、将系统分解成能控与不能控子系统;
现代控制理论3 第三章 线性系统的可控性和可观测性

A'
0
0
0
a0 a1 a2
0
0 可
0
0
B'
控 标
1
an1
0 1
准 形
AT=A’
BT=B’
0 0 0 1 0 0 A 0 1 0
a0
a1
C 0
0 1
0 0
a2
可观标准形
1 an1
结论:状态方程具有可观测标准形的系统一定可观测。
C 0 0
CA
0
0
V
CA2
3.2线性定常系统的可观测性
1.线性定常离散系统状态可观测性
(1) 离散系统可观测定义
x(k 1) Gx(k) Hu(k ) y(k) Cx(k) Du(k)
已知输入u(0),…,u(n-1)的情况下,通过在
有限个采样周期内测量到的输出y(0),y(1),…, y(n-1),能唯一地确定任意初始状态x(0)的n个分量, 则称系统是完全可观测的,简称系统可观测。
(2) 线性定常连续系统可控性判据
若线性定常连续系统的状态方程为
x Ax Bu
则该系统可控的充分必要条件为其可控性矩阵
Sc B AB
满秩,即 rankSc n
An1B
示例
(3) 可控标准形
结论:状态方程具有可控标准形的系统一定可控。
x1 0
x2
0
xn
1
0
xn a0
使上述方程组有解的充分必要条件是
Sc' Gn1H
GH H
满秩,且 rankSc' n
亦即 Sc H GH
Gn1H 且rankSc n
离散可控性例题
E1控制工程领域工程硕士专业课程

控制工程领域工程硕士专业课程教学大纲课程编号:E232-40课程名称:现代控制理论,Modern Control Theory教学方式:授课总学时和学分:60学时,3学分,其中授课56学时,习题2学时,考试2学时适合专业:控制工程领域,计算机技术工程领域考试方式:笔试课程作用与任务:本课程为控制工程领域的工程硕士研究生的必修学位课程,主要内容为线性多变量系统基本理论、最优控制理论、最优状态估计理论、系统辨识。
通过本课程的学习,使硕士研究生掌握现代控制理论的基本分析与设计方法,并为后续课程的学习奠定坚实的基础。
教学内容与学时分配:第 1 章绪论(1学时)第 2 章多变量系统的描述(3学时)第 3 章线性系统的可控性、可观性、标准型(4学时)第 4 章状态反馈与状态观测器(4学时)第 5 章系统的稳定性分析(2学时)第 6 章变分法及其在最优控制中的应用(6学时)第 7 章极大值原理和典型最优控制(6学时)第 8 章动态规划与最优控制(4学时)第 9 章最优状态估计(6学时)第 10 章线性二次型高斯问题(2学时)第 11 章系统辨识的基本概念(2学时)第 12 章经典系统辨识方法(2学时)第 13 章最小二乘类辨识方法(6学时)第 14 章其他辨识方法(4学时)第 15 章模型阶次的确定(4学时)参考书目:[1]Patel R V. Munro N. Multivariable System Theory and Design. Pergamon Press, 1982[2]白方周,庞国仲. 多变量频域理论与设计技术. 北京:国防工业出版社,1988[3]庞富胜. 线性多变量系统. 武汉:华中理工大学出版社,1992[4]Sage A P. Optimum System Control, 2nd ed. Prentice-Hall Inc, Englewood Cliffs NJ, 1977[5]吴受章.应用最优控制.西安:西安交通大学出版社,1987[6]Astrom K J. An Introduction to Stochastic Control Theory. Academic Press, 197094控制工程领域工程硕士专业课程教学大纲[7]方崇智,萧德云. 过程辨识. 北京:清华大学出版社,1988学习要求:先修课程:矩阵理论,线性代数,自动控制原理学习方法:课堂教学+查阅有关文献资料所属学院:信息科学与工程学院编制人:顾幸生审核人:顾幸生课程编号:E232-41课程名称:先进控制系统,Advanced Control System教学方式:授课总学时和学分:40学时,2学分,其中:课堂教学 30学时,研讨及撰写小论文 10学时适合专业:控制工程领域,计算机技术工程领域考试方式:小论文课程作用与任务:本课程讨论那些比较成熟且在工业过程控制中比较行之有效的控制系统的基本原理、系统设计及工业应用等问题,特点是理论联系实际,内容切合信息时代的需要,反映当前最新科研成果,并力求深入浅出,着重概念。
现代控制理论-第三章 4 指导规范分解
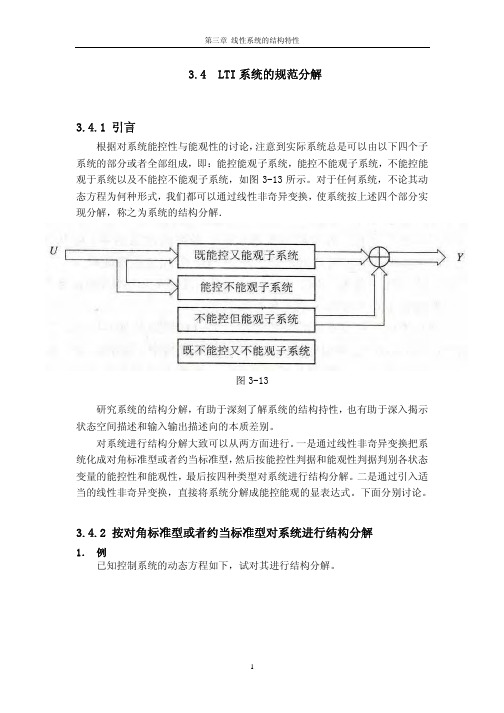
第三章 线性系统的结构特性
假定:子系统 1、子系统 2 距离 1 米,二者无任何机、电连接。但子系统 2 着火,可能会烧着子系统 1,导致系统损坏。
建模时若只考虑机、电连接,则子系统 2 不可控不可观; 建模时还考虑了空间热传递,则子系统 2 不可控但部分可观。 5、例 例 15 给出线性定常系统如下,试求能观测规范分解表达式。
信息只进不出:因为能控,所以谁都可进; 因为不能观,所以只进不出, 否则本身会变能观
讲解上图。
信息只出不进:否则可能导致别的不能观的 Æ 能观的 信息能进入别的不能观的,不能进入能观的, 否则本身会变能观
3、线性非奇异变换的构造
⎡ X CO ⎤ ⎢⎥
①一次变换法:
X
T
→
⎢ ⎢
X
CO
⎥ ⎥
, 涉及较多的线性代数概念。
+
⎢ ⎢ ⎢
B2 0
⎥⎥U ⎥
A44 ⎥⎦⎢⎣ X CO ⎥⎦ ⎢⎣ 0 ⎥⎦
⎡ X CO ⎤
⎢⎥
[ ] Y = C1
0
C3
0
⎢ ⎢ ⎢
X X
CO CO
⎥ ⎥ ⎥
⎢⎣ X CO ⎥⎦
2、 X CO X CO X CO X CO 的相互作用
16
第三章 线性系统的结构特性
不能观的不能进来,否则可能导致不能观的 Æ 能观的
注: X = PX 。
3
第三章 线性系统的结构特性
以上结论说明,对系统作线性非奇异变换,不改变系统的能控性和能观测性, 也不改变其不完全能控和不完全能观测的程度。正是基于这—点,线性系统完全 可以通过线性非奇异变换来实现系统的结构分解。
3.4.4 LTI 系统按能控性的结构分解
现代控制理论总结

现代控制理论总结第一章:控制系统的状态空间表达式1、状态变量,状态空间与状态轨迹的概念:在描述系统运动的所有变量中,必定可以找到数目最少的一组变量,他们足以描述系统的全部运动,这组变量就称为系统的状态变量。
以状态变量X1,,X2,X3,……X n为坐标轴所构成的n维欧式空间(实数域上的向量空间)称为状态空间。
随着时间的推移,x(t)在状态空间中描绘出一条轨迹,称为状态轨迹。
2、状态空间表达式:状态方程和输出方程合起来构成对一个系统完整的动态描述,称为系统的状态空间表达式。
3、实现问题:由描述系统输入输出关系的运动方程或传递函数建立系统的状态空间表达式,这样的问题称为实现问题单入单出系统传函:W(s)=,实现存在的条件是系统必须满足m<=n,否则是物理不可实现系统最小实现是在所有的实现形式中,其维数最低的实现。
即无零,极点对消的传函的实现。
三种常用最小实现:能控标准型实现,能观标准型实现,并联型实现(约旦型)4、能控标准型实现,能观标准型实现,并联型实现(约旦型)传函无零点系统矩阵A的主对角线上方元素为1,最后一行元素是传函特征多项式系数的负值,其余元素为0,A为友矩阵。
控制矩阵b除最后一个元素是1,其他为0,矩阵A,b具有上述特点的状态空间表达式称为能控标准型。
将b与c矩阵元素互换,另输出矩阵c除第一个元素为1外其他为0,矩阵A,c具有上述特点的状态空间表达式称为能观标准型。
传函有零点见书p17页……..5、建立空间状态表达式的方法:①由结构图建立②有系统分析基里建立③由系统外部描述建立(传函)6、子系统在各种连接时的传函矩阵:设子系统1为子系统2为1)并联:另u1=u2=u,y=y1+y2的系统的状态空间表达式所以系统的传递函数矩阵为:2)串联:由u1=u,u2=y1,y=y2得系统的状态空间表达式为:W(S)=W2(S)W1(S)注意不能写反,应为矩阵乘法不满足交换律3)反馈:系统状态空间表达式:第二章:状态空间表达式的解:1、状态方程解的结构特征:线性系统的一个基本属性是满足叠加原理,把系统同时在初始状态和输入u作用下的状态运动x(t)分解为由初始状态和输入u分别单独作用所产生的运动和的叠加。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
返回
说说 明明
⎧x&(t) = Ax(t) ⎩⎨y(t) = Cx(t)
e 当输出个数与状态个数相等,且C 阵可逆时,
状态观测值可以立刻获得:x(t) = Cn×n−1y(t)
a 当输出个数少于状态个数时,状态观测值需要一定
c的时间来确定,即:
y(t0 ) = Cx(t0 )
y y(t1) = Cx(t1) = CeA(t1−t0 )x(t0 )
tc M
x(t ) = eA(t−t0 )x(t0 )
y(t) ⇒ x(t0 ) ⇒ x(t)
——由输出测量值求状 态初值,再由状态初值 求状态任意时刻的值。
定义
3
二、线性定常连续系统的可观测性判据
e 格拉姆矩阵判据
ca 线性定常连续系统完全可观 ⇔ 存在 t1 > 0
tcy ∫ 使格拉姆矩阵
注 意 对角阵含有相同元素时,要求更高!
e ⎡λ1
⎤
⎢
a ⎢
λ1
⎥ ⎥
⎢⎣
λ2 ⎥⎦
A 的两重特征值有两个 独立的特征向量
c¾¾CC矩矩阵阵的的列列线线性性无无关关 tcy or:秩判据
⎡C⎤
⎢ rank ⎢
CA
⎥ ⎥=n
⎢M⎥
⎢ ⎣CA
n−1
⎥ ⎦
返回
8
例:判别下列对角规范型线性定常系统的可观性。
CA M
⎥
⎥ ⎥
=
dim
A
=
n
tc ⎢⎣CA
n−1
⎥ ⎦
nq×n阶可观测性矩阵
返回
4
例:判别下列系统的可观性。
⎡0 1 0⎤
e x&
=
⎢ ⎢
0
⎢⎣− 2
0 −4
1 ⎥⎥x, − 3⎥⎦
y
=
⎡0 ⎢⎣1
1 2
−1⎤ 1 ⎥⎦x
a 解: 秩判据
c ⎡0
y V
=
⎡C⎤
⎢ ⎢
CA
⎥ ⎥
⎢⎣CA2 ⎥⎦
y CC矩矩阵阵中中与与约约当当块块第第一一列列对对应应的的列列不不全全为为零零
((与与约约当当块块其其它它列列对对应应的的列列可可以以全全为为零零))
tc CC矩矩阵阵中中与与互互异异特特征征值值对对应应的的列列不不全全为为零零 返回
9
x&
=
⎡λ1 ⎢
⎣
1⎤ ⎡0⎤
λ1
⎥ ⎦
x
+
⎢⎣b2
⎥u ⎦
c A 的特征值
tcy 或者
rank
⎡C ⎢⎣sI −
⎤ A⎥⎦
=
dim
A
=
n
返回
PBH 特征向量判据
e Popov-Belevitch-Hautus Eigenvector Tests a ⇔ 线性定常连续系统完全可观 cA 不能有与C 所有的行正交的非零右特征向量
tcy Aα = λα, Cα = 0 ⇒ α ≡ 0 返回 6
=
⎡− 2
⎢ ⎢
0
1 −2
0⎤⎡ x1 ⎤
0⎥⎥
⎢ ⎢
x2
⎥ ⎥
e ⎢⎣x&3 ⎥⎦ ⎢⎣ 0 0 5⎥⎦⎢⎣x3 ⎥⎦
a⎡
⎢
c⎣
y1 y2
⎤ ⎥ ⎦
=
⎡2 ⎢⎣0
0 0
0⎤ −1⎥⎦
⎡ ⎢ ⎢ ⎢⎣
x1 x2 x3
⎤ ⎥ ⎥ ⎥⎦
不全为零 系统可观!
y 2,
⎡ ⎢ ⎢
x&1 x&2
⎤ ⎥ ⎥
⎡−1 ⎢ ⎢
=
⎢⎢1 ⎢2 ⎢
tc ⎣
⎡0
A
=
⎢ ⎢
0
⎢⎣− 2
1 0 −4
0⎤ 1 ⎥⎥, − 3⎥⎦
C
=
⎡0 ⎢⎣1
1 2
−1⎤
1
⎥ ⎦
1 −1⎤
2 4
1
⎥ ⎥
4⎥
前三行已使
rankV = n = 3
M
⎥ ⎦
系统完全可观!(后续元素不必计算)
例:判别下列系统的可控性和可观性。
⎡ x&am⎥ ⎦
e 1,
⎡ ⎢ ⎣
x&1 x&2
⎤ ⎥ ⎦
=
⎡− 2 ⎢⎣ 0
0 ⎤⎡ x1 ⎤ −1⎥⎦⎢⎣x2 ⎥⎦
ay =[1
0]⎢⎡
⎣
x1 x2
⎤ ⎥ ⎦
有全零列 系统不可观!
c2,
⎡ ⎢ ⎣
x&1 x&2
⎤ ⎥ ⎦
=
⎡1 ⎢⎣0
0⎤⎡ x1 ⎤
1⎥⎦
⎢ ⎣
x2
⎥ ⎦
列线性相关
y y =[1
1]⎢⎡
⎣
x1 x2
=
rank
⎢ ⎢
0
⎢0
⎢⎢− 2
0 0 2
1⎥⎥ 0⎥ = 3 0⎥⎥
tc ⎢⎣ M ⎥⎦
线线性性定定常常连连续续系系统统可可观观性性判判据据
e 格拉姆矩阵判据 a 秩判据 c PBH 秩判据 y PBH 特征向量判据 tc 特殊形式判据
12
x&(t) = Ax(t)+ Bu(t) y(t) = Cx(t)+ Du(t)
M(0,t1) Δ
t1 eATtCT CeAt dt
0
非奇异。
返回
秩判据
n × n 阶可观测性矩阵
⎡c⎤
e 单输出: rankVT
⎢ = rank ⎢
cA
⎥ ⎥ = dim A = n
⎢M⎥
a ⎢⎣cA
n−1
⎥ ⎦
条件满足即可,
c 不必写出所有的行
⎡C⎤
y 多输出: rankVT
⎢
=
rank
⎢ ⎢
e y = [c1 0]x
x&1 = λ1x1 + x2 x&2 = λ1x2 + b2u
返回
y = c1x1
系统可观测!
a尽管 y 不显含 x2 x2 通过 x1 反映在 y 中
cu tcy b2
x&2 ∫ x2
λ1
x&1 ∫ x1 c1
y
λ1
x&
=
⎡λ1 ⎢
⎣
1⎤ ⎡0⎤ λ1⎥⎦x + ⎢⎣b2 ⎥⎦u
现代控制理论提纲
e 线性连续系统
线性离散系统
a可控性 c可观性 tcy 稳定性
建立
建建模模
状态空间 表达式
求解
转换
分分析析
状态反馈
设设计计 状态观测器
最优控制
返回
第三章 线性系统的可控性与可观性
e §1 可控、可观测性的概念 ca §2 线性系统的可控性
§3 线性系统的可观测性
tcy §4 线性系统的可控与可观测标准型
返回
2
一、线性连续系统可观测性的定义
⎧x& (t
e⎩⎨y(t
) )
= =
A(t C(t
)x(t )x(t
), ),
t ∈Tt
x(t0 ) =
x
0
a 给定初始时刻 t0 ∈Tt,如果存在有限时刻 t1 ∈Tt , t1 > t0 c对于所有的 t ∈[t0,t1],系统输出y(t)能唯一地确定状态 tcy 向量的初值 x(t0),则称系统在 [t0,t1]内完全可观测。
e系统的可观性完全取决于系统的 a结构、参数以及输出与状态的关系。
c tcy 系统矩阵A
输出矩阵C
三、线性离散系统的可观测性定义
线性时变离散系统的状态方程和输出方程为:
e ⎧x(k +1) = G(k)x(k)+ H(k)u(k) a⎩⎨y(k) = C(k)x(k)+ D(k)u(k) ,
k ∈Tk
——第k步可由输出 y(k ) 确定状态变量 x2 (k )
y y(k +1) = x2(k +1) = −2x2(k)+ x3(k) tc ——第k +1步可以确定状态变量 x3(k)
返回
15
例:判别下列线性定常离散系统的可观性。 返回
前页
⎡1 0
e x(k +1) = ⎢⎢0 − 2 ⎢⎣3 0
x&1 = λ1x1 + x2 x&2 = λ1x2 + b2u
比较 返回
e y = [0 c2]x
y = c2x2 系统不可观测!
cau b2
x&2 ∫ x2
y
c2
x&1 ∫ x1
λ1
λ1
tcy y与 x1无任何联系!
x` 既未直接反映在 y 中, 也未通过 x2间接反映在 y 中
10
注 意 多个约当/对角块含相同特征值时,要求更高!
返回
7
x&
=
⎡λ1 ⎢
⎣
λ2
⎤ ⎥ ⎦
x
+
⎡b1 ⎢⎣b2
⎤ ⎥u ⎦
e y = [c1 0]x
ab1
x&1 ∫
x&1 = λ1x1 + b1u x&2 = λ2 x2 + b2u
y = c1x1
x1 c1
y
cu
λ1
b2
x&2 ∫ x2
系统不可观测!
y λ2 tc y与 x2无任何联系
x2 既未直接反映在 y 中, 也未通过 x1 间接反映在 y 中