微动工作台的分类和组成
基于柔性铰链结构的二维微动工作台的设计分析
收稿日期:2005 05 13基金项目:国家自然科学基金资助项目(50135040;69774020)作者简介:张建雄(1977 ),男,江苏泰兴人,硕士生,研究方向:智能仪器仪表和控制。
文章编号:1004 2474(2006)05 062403基于柔性铰链结构的二维微动工作台的设计分析张建雄,孙宝元(大连理工大学,精密与特种加工教育部重点实验室,辽宁大连116023)摘 要:介绍了基于压电陶瓷驱动器(P ZT )驱动的二维微动工作台。
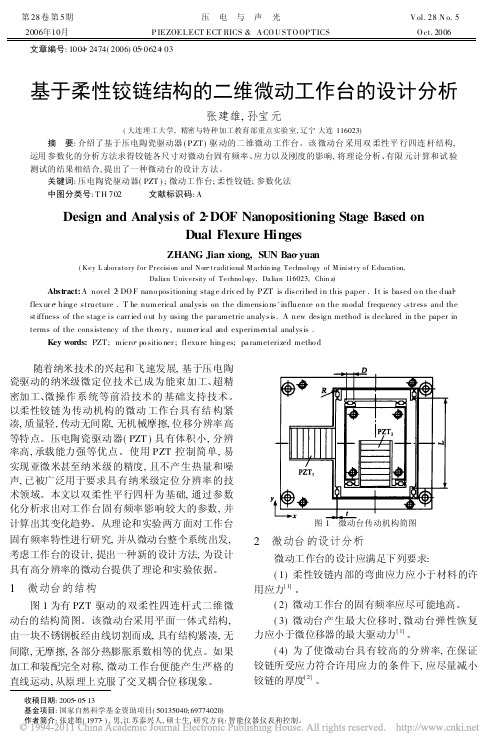
该微动台采用双柔性平行四连杆结构,运用参数化的分析方法求得铰链各尺寸对微动台固有频率、应力以及刚度的影响,将理论分析、有限元计算和试验测试的结果相结合,提出了一种微动台的设计方法。
关键词:压电陶瓷驱动器(PZT );微动工作台;柔性铰链;参数化法中图分类号:T H 702 文献标识码:ADesign and Analysis of 2 DOF Nanopositioning Stage Based onDual Flexure HingesZHANG Jian xiong,SUN Bao yuan(Key L aboratory for Precision and Non traditional M achin ing Technology of M inistry of E ducation,Dalian University of Technology,Dalian 116023,Chin a)Abstract:A novel 2 DO F nano positioning stag e driv ed by P ZT is discribed in this paper .I t is based o n the dualflex ur e hing e structure .T he numerical analysis on the dimensio ns'influence o n the modal frequency 、str ess and the st iffness of the stag e is carr ied o ut by using the par ametric analy sis.A new desig n method is declared in the paper in terms of the consistency of the theo ry ,numer ical and experimental analysis .Key words:PZT ;micro po sitio ner ;flexure hing es;pa rameterized metho d随着纳米技术的兴起和飞速发展,基于压电陶瓷驱动的纳米级微定位技术已成为能束加工、超精密加工、微操作系统等前沿技术的基础支持技术。
七、柔性铰链微动机构的分析与设计

七、柔性铰链微动机构的分析与设计一. 实验目的1.认识柔性四连杆机构的形貌2.了解柔性铰链工作台的工作原理及应用前景3.掌握柔性铰链的分析与设计方法4.掌握微位移工作台的分析与设计方法二. 柔性铰链微动机构的用途与发展前景由于宇航和航空等技术发展的需要,对实现小范围内偏转的支承,不仅提出了高分辨率的要求,而且对其尺寸和体积提出了微型化的要求。
人们在经过对各类型的弹性支承的实验探索后,才逐步开发出体积小无机械摩擦、无间隙的柔性铰链。
随后,柔性铰链立即被广泛地用于陀螺仪、加速度计、精密天平、导弹控制喷嘴形波导管天线等仪器仪表中,并获得了前所未有的高精度和稳定性。
如日本工业技术院计量研究所,利用柔性铰链原理研制的角度微调装置,在3分的角度范围内,达到了1000万分之一度的稳定分辨率。
近年来,柔性铰链又在精密位移工作台中得到了实用。
柔性铰链微位移机构具有较高的位移分辨率,再配合压电陶瓷驱动器可实现微小位移,可适合各种介质环境工作。
微位移技术直接影响到微电子技术等高精度工业的发展,如微电子技术随着集成度的提高,线条越来越微细化,与之相对应的工艺设备:光刻机、电子束和x射线曝光机等,其定位精度要求为线宽的1/3~1/5,即亚微米甚至纳米级的精度,这就要求精密工作台具备相应的技术水准,柔性铰链是关键技术之一。
三. 柔性铰链工作台的结构a) 单柔性四连杆b) 双柔性四连杆图7-1 单、双柔性四杆机构变形原理图为保证位移方向的直线性,柔性工作台一般由平行四杆结构的铰链组成。
单柔性平行四杆机构沿一个移动方向产生位移时,在其垂直方向同时产生一个交叉耦合位移,参见图一中的Δ,且随柔性铰链弯曲偏转角的增大而增加,而双柔性平行四杆机构(图7-1b),由于结构对称,当沿一个方向受力产生位移时,两侧铰链均产生交叉耦合位移。
即:如果加工完全对称,双柔性平行四杆机构能产生严格的直线运动,从原理上克服了单柔性平行四杆机构易产生交叉耦合位移的缺陷,是超精密定位系统的首选结构,双柔性工作台结构参见图7-2。
磁悬浮式纳米级微动工作台的理论分析与建模研究

第2卷 第 9 7 期 20 年 9 06 月
V0 . 7 No 9 12 .
Se p. 2 6 00
磁 悬 浮 ห้องสมุดไป่ตู้ 纳 米 级 微 动 工 作 台 的理 论 分 析 与 建 模 研 究
陈本 永 雷 勇 李延 宝 张丽 琼 王俊 茹 冯 平
( 江理 工 大 学 纳 米 测 量 技 术 实 验 室 杭 州 3 0 1 ) 浙 10 8
仪 .浮 三 摘 要 磁 式微 动 工 作 台 由 于运 动 平 台和 驱 动 机 构 采 用 非 接 触 式 的 磁 悬 浮 驱 动 技 术 而 易 于 实 现 大 范 围 纳 米 级 精 度 的微 运 悬
{ 8
动 。本 文 构 建 了 一 种 新 型 的磁 悬 浮微 动 工 作 台 , 理 论 上 对 磁 悬 浮 式 微 动 工 作 台的 运 动 机 理 进 行 了详 尽 分 析 , 立 了磁 悬 浮 式 从 建 微 运 动 的 电 磁 驱 动 模 型 , Malb对 磁 悬 浮 式 微 动 工 作 台 的 运 动 控 制 进 行 了 仿 真 研 究 , 果 表 明 , 计 的磁 悬 浮 式 微 动 工 作 台 用 t a 结 设
t 能 达 到纳 米 级 的微 运 动 。本 文 的研 究 成 果 为 磁 悬 浮 式 微 动 工作 台的 设 计 及 其 控 制 提供 了 理 论 基 础 。
器
艾
关 键 词 磁 悬 浮 微 动 工 作 台 理 论 分 析
中 图 分 类 号 T 3 . 文 献 标 识 码 A H1 3 3
报 _ Che e yo g 蚕 nB n n
Le Yo g Li n a Z a g Liin W a gJ n u Fe g P n i n Ya b o h n qo g n u r n ig
四维微调工作台机械结构设计-说明书
四维微调工作台机械结构设计-说明书本科学生毕业设计四维微调工作台结构设计系部名称: 机电工程学院专业班级: 机械设计制造及其自动化08-3班学生姓名: 杨磊指导教师: 陈佳莹职称: 教授哈尔滨工程大学二○一二年六月The Graduation Design for Bachelor's DegreeStructure Design of 4D Micro Motion Stage Candidate:Yang lei Specialty:Mechanical Design and Manufacture&Automation Class:08-3 Supervisor:Prof. Chen Jia ying Heilongjiang Institute of Technology2012-06?Harbin摘要在当前的工程设计实验中,激光发射器和各种光学器件的调节定位,都需要一种高精度的定位测量仪器。
正是在这种需求下,产生了一系列精密定位测量仪器,本文设计了精密定位测量仪器四维微调工作台。
本设计对四维微调工作台的精密定位原理及结构组成进行了研究。
为了实现高精度的快速定位,在系统的机械结构设计上采用粗动台和微动台的组合结构进行控制,达到了满意的定位精度。
四维微调工作台是一种高精密定位工作台,通过齿轮、齿条和螺旋的传动,实现X、Y、Z轴方向的调节,同时还可进行水平转角以及垂直仰角的调节。
实现X轴粗调范围:0~25mm 分辨率:0.001mm Y轴调节范围:±25mm分辨率:0.1mm Z轴调节范围:0~22mm 转角粗调范围:0~360°角度精细调节范围:±5°的主要技术指标。
关键词:四维微调;调节定位;微调工作台;测量仪器;定位工作台。
ABSTRACTThis design studies the precision positioning principle and structure composition of 4D Micro motion stage. Which is a highly precision positioning instrument. It can realize three directions’ regulation, including X, Y and Z. by the motor driving of wheel gear, gear rack and threads. And it can also realize level angle and angle of elevation’s driving .It is mainly used in engineering experiment. As the poisoning control stent it is used to poisoning control of various optical instrument. This devise can be installed on a long guide way to measure a long distance. To realize highly precision poisoning’s fast location, in this design I adopt the way of coarse adjustment trimmingcombine together. A fter finish the design I know more about the device’s system constitution and work principle and most important what I designed can satisfy the require precision. Realize the task target requirement that the coarse adjustment coverage of X is 0~25mm, resolution rate is 0.001 mm , the coverage of Y is ±25mm, resolution rate is 0.1mm, the coverage of Z is 0~22mm , the coarse adjustment coverage of deflection angle is 0~360°, the trimming coverage is±5°Key words: 4D Micro motion; poisoning control; Micro motion stage; Measuring instrument; location stage.目录摘要IAbstract II第1章绪论 11.1课题背景及研究意义 11.2国内外研究现状 11.2.1微调工作台的驱动方式 11.2.2国外研究现状 21.2.3我国的研究现状 31.3微调精密定位工作台的发展前景 31.4系统组成及工作原理 51.5本文的主要工作 6第2章四维微调工作台的总体方案设计72.1微调工作台的结构设计及特点72.1.1机身结构设计应满足下列要求72.1.2四维微调工作台的设计特点72.2微调工作台机体主要材料的选择72.3微调工作台导轨设计形式的选择82.4四维微调工作台的组成及工作原理 92.4.1 X方向粗调机构 92.4.2X方向微调机构102.4.3 Y方向粗调机构 102.4.4 Z方向调节机构 112.4.5水平转角调节机构122.4.6垂直仰角调节机构122.5 本章小结14第3章四维微调工作台的结构设计153.1 微调工作台的传动设计计算153.1.1X轴方向粗调结构设计153.1.2Y轴方向的粗调机构设计 243.1.3Z轴方向的粗调机构设计 243.1.4X轴方向微调机构设计263.1.5仰角调节机构设计313.2导轨的设计323.2.1作用力方向和作用点位置对导轨工作的影响分析 323.2.2导轨主要尺寸的确定343.2.3导轨的误差分析 353.3弹簧的设计353.3.1X轴方向微调机构的弹簧设计353.3.2绕Z轴旋转微调机构的弹簧设计 38 3.3.3仰角调节机构的弹簧设计393.4微调工作台的支撑和基座设计393.4.1支承的设计393.4.2基座的设计403.5本章小结41第4章示数装置的设计424.1示数装置设计要求 424.2示数装置的分类424.3X-Y轴方向粗调示数装置的设计424.3.1类型的选择424.3.2标尺与指针的选择424.3.3分度尺寸的选择 434.4X轴微调示数装置的设计434.4.1设计原理434.4.2设计计算434.5本章小结44结论45参考文献46致谢48第1章绪论1.1课题背景及研究意义随着科学技术的发展,在电子、光学、机械制造等众多技术领域中迫切需要高精度、高分辨率、能够灵活控制的微动系统用以直接进行工作或配合其它仪器设备完成高精度的定位和测量。
新型微动工作台的设计与计算
( 合肥工业大学 机械与汽车工程学 院, 安徽 合肥 200) 3 0 9
摘
要 : 章设计 了一种新型压电式双 自由度微位移工作 台, 出了一种 采用直角双杆 机构 代替平行 四杆机 文 提
构实现双 自由度运动的方 法 ; 基于卡 氏第 二定理推导 了新型工作 台在不同方向上的输 出刚度解析 表达式 , 在 此基础上推导 出了工作 台的前 2阶固有 频率 ; 根据得到 的输 出刚度表 达式 , 定量地分析 了柔性 铰链参 数及 连 杆长度对工作台输出刚度的影 响; 同时针对 3 组不 同尺寸参数 的工作台 , 采用有 限元法对其进行数值计算 , 并
t e r t a a c lto . Th e u t f t e t e h d r n g o g e m e t h o e i lc lu a i n c e r s ls o h wo m t o s a e i o d a r e n ,wh c n ia e h t ih idc ts t a t e t e r tc l h h o e ia d l r o r c . mo e s a e c r e t Ke r s m ir - t n s a e l x r i g ;v ri a wo b r m e h n s ;FEA y wo d : c o mo i t g ;fe u e h n e e t l o c t - a c a im
第3 1卷 第 1 0期
20 0 8年 1 0月
合 肥 工 业 大 学 学 报 (自然科 学版)
J OURNAl OF HEF EIUNI VERS TY CHNOLOGY I OF TE
Vo . 1No 1 13 . O
0c . 2 0 t 0 8
微动平台参考资料
摘要微动平台的机构优化及其超精运动控制技术,是目前微/纳制造领域中的研究热点之一,具有广阔的应用前景。
为此,本文在优化设计基于柔性铰链的二维微动平台本体结构,并分析其静/动力学性能的基础上,以高性能ATmega128微控制器为中心测控单元,PA85为功率放大模块,结合传统的PID控制技术,研发了一套数字式的二维微动平台驱动控制系统,并实现了系统的集成。
研究的主要工作如下:首先,提出了一个由压电陶瓷驱动器、柔性铰链平台机构、衍射光栅位移传感器和微控制器构成的二维微动平台的总体设计方案;并在此基础上设计了一个综合杠杆放大和柔性铰链机构的二维低耦合微动平台结构,其运动放大比为5,工作行程为100μm×100μm。
然后,采用通用有限元软件ANSYS对优化后的平台进行了静力、动态特性和瞬态响应分析,验证了所设计二维平台的运动传递、静态和动态力学特性。
其次,针对二维微动平台的超精密控制要求,研制了由ATmega128微控制器、ADS8325模数转换模块、DAC8564数模转换模块组成的控制系统的硬件部分;并编制了微控制器与AD、DA模块进行SPI通讯以及与上位机串行通讯的接口程序,实现了PID控制运算模型;采用负反馈线性电压放大电路,将控制信号进行电压与功率放大后驱动压电陶瓷,进而控制微动平台运动。
最后,组装了二维微动实验平台,并进行了0.625Hz、5Hz、10Hz和20Hz的谐波轨迹的跟随实验,验证了论文所设计的二维低耦合微动平台及其控制系统的有效性和运动跟随性能。
关键词:微动平台;柔性铰链;ATmega128微控制器;控制ABSTRACTMicro motion stage is one of the most hot research fields with broad prospect, of which the key technology is its mechanism and precision positioning control. The mechanism of a two-dimensional nano-manipulator is optimized and its static and dynamic performances are analyzed with FEM in ANSYS. Hence, the driving control system for this nano-positioning stage is developed and the integrated experimental platform is realized, applying ATmega128 as its central control unit and PA85 as power amplify unit and combining with the traditional PID control technology. The contents of this dissertation as below:First of all, the thesis proposes the overall scheme of the nano-positioning stage and designs a low coupling two-dimensional nano-manipulator having flexure hinges and lever mechanisms with magnifying ratio 5, of which the working stroke is 100μm×100μm. Besides, FEM analysis of the optimized nano-manipulator in ANSYS were performed to verify the parasitic motion suppressing effects and guarantee the work stoke in limited workspace, as while as its statistic and dynamic response characteristics.Moreover, for the precision positioning control of the nano-positioning stage, the thesis develops its hardware of this control system, consisting of ATmega128 MCU, ADS8325 A/D module, DAC8564 D/A module. Furthermore, the compiling of the SPI communication between the MCU and A/D, D/A module is realized, as while as the calculate model of PID control. The design adopts negative feedback high-voltage amplifier circuit to amplify control signal to drive the piezo actuator, so that the nano-manipulator can be positioned.Finally, based on the assembly experimental platform, the effectiveness and performance of the low coupling nano-positioning stage and its driving control system is verified through the experiment of tracking 0.625Hz, 5Hz, 10Hz and 20Hz harmonic signal.Key words: nano-positioning stage; flexure hinge; ATmega128 micro controller; control目录摘要 (I)ABSTRACT (II)第1章绪论 (5)1.1微动平台研究的意义 (5)1.2微动平台关键技术研究现状 (6)1.2.1 柔性铰链微动平台的研究现状 (6)1.2.2 微动平台控制技术的研究现状 (8)1.3本论文所完成的工作 (10)第2章微动平台总体方案设计 (11)2.1微动平台总体设计方案 (11)2.1.1 微动平台设计目标 (11)2.1.2 微致动器选择 (11)2.1.3 系统总体方案 (13)2.2基于ATmega128微控制器的压电陶瓷驱动控制系统总体设计 (14)第3章二维微动平台的结构设计及其特性分析.错误!未定义书签。
70ab微动开关工作原理
70ab微动开关工作原理
微动开关是一种常用的电子开关,工作原理如下:
1. 结构: 微动开关由外壳、弹片、活动臂、触点、固定销、弹簧和插销等部件组成。
2. 弹片和弹簧: 微动开关内部有一片金属弹片,一端通过弹簧与固定销相连,另一端与活动臂相接。
3. 活动臂: 活动臂由绝缘材料制成,可以来回旋转。
4. 触点: 微动开关内部具有一对触点,通常分为常闭触点和常开触点。
弹片连接常开触点,活动臂连接常闭触点。
5. 工作原理:当没有外力作用在微动开关上时,由于弹簧的收缩作用,弹片接触常闭触点,断开常开触点,实现断路。
6. 激活过程:当外力作用于微动开关上时,活动臂旋转,并通过插销来推动弹片。
推动弹片后,弹片离开常闭触点,接触常开触点,实现闭路。
7. 断路和闭路:根据外力的大小和方向,微动开关可以实现从断路到闭路或者从闭路到断路的切换。
这种切换动作在实际应用中常用于控制电路的开关灵敏度和准确性。
总之,微动开关通过弹片、活动臂和触点等部件的配合,实现了电路的断路和闭路,从而实现对电子设备的控制。
新型二维压电驱动微动工作台的设计分析

Ke r s:iz cu tr P T )n n p s inn ywo d p eo a ta o ( Z )a o o i o igdlx r i e; EM t e u ehng F
1 引言
随 着 纳米 技 术 的兴 起 和迅 猛 发展 , 于压 电驱 基 动的 纳米 级徽 定 位 技术 已成 为微机 电系统 、 扫描 探 测显微镜 、 精密加工 、 超 细胞操 作等诸 多前 沿技 术的 基础支持 技 术 。尤其 是 多 自由度纳米 级微 定位工 作 台的应 用越来 越受到 重视 。
纳 米 级微 定 位 系统 的传 动副是 柔 性铰 链 , 是 它
一
载的能 力 , 体现 了运 动副 的柔性 程度 , 也 是主要 的 研
究因素 口 ]本 文基于材 料 力学理 论对新 型 的直角 平 。 行板 柔性 铰链进 行 了理 论 建 模 , 出 了铰链 的 刚度 得
计 算 表达 式 , 用有 限 元分 析 软件 对 新 型的 直 角 平 采
l e u e Ha b n I s iu  ̄ o e o o y。 r L 5 0 1, i ) l . r t r i n tt i fTe hn t g Ha b n 1 0 0 Ch na i f ̄ e
Abta t A o e - sr c : n v l2DOF n n p st nn tg rr d b Z i e e p e .n t i p p r t et e r fg n a o o ii igsa ed /e yP T sd v h o d I hs a e .h h oy o e - o i ea eh nc su e o a ay ete f u ehn eo tg ,n h t f e so ih a g hx r ig e ie . r l c a isi s dt n l s h  ̄x r ig f a e a dt si n s frg - n h f u ehn ei d rv d m s e f i i s Th u eia n lsso tt n y a cb h vo ft ehn ea h t g a re y u igt efnt l・ en m rcla y i n sai a d n mi e a iro h ig n t sa ei c rid b sn h iieee a c d d e s me t t o ( EM )a d t x ei na n lssi p ro me o me s r h d lfe u n  ̄so h tg . i r sme h d F ,n h e p rme tla ay i s ef r d t au e t emo a r q e c ft es a e e Th on itn yo h h o y, u r a n x e i n a e It r v dt eac rc ft e r d l n h a e c sse c fte t e r n mei la e p rme t I s1 sp o e h cu ayo h y mo e a t ev — c d r 1 o d l i ft eFEM n ls . i t o h d y a yi a s
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.2 微动工作台的类型及主要组成微动工作台根据其工作原理和驱动方式的不同可分为以下几种。
1.2.1 扭轮摩擦传动式微位移平台扭轮摩擦传动式微位移机构是利用扭轮摩擦传动机构实现微位移机构。
一般的摩擦传动方式是将驱动摩擦轮展开为直线运动,运动分辨率有限。
当将摩擦副的主动轮与从动杆母线交角从直扭轮摩擦传动图图二角减小为一很小的角度时,形成的摩擦副即为扭轮摩擦副,利用扭轮摩擦副做成的传动机构称扭轮摩擦传动机构,它可以得到很小的导程和纳米级的运动分辨率和定位精度,具有运动平稳、无间隙和无爬行等优点。
我们研制的扭轮摩擦传动机构示意图如图1所示,其导程小于0.2mm,若选用高运动分辨率的电机,则可达在250mm范围内得到纳米级的运动分辨率和定位精度。
它可应用于许多超精密传动领域。
1.2.2 机械传动式微位移平台机械传动式微位移机构是一种最古老的机构,在精密机械和仪器中应用很广,其结构形式较多,主要有螺旋机构、杠杆机构、契块凸轮机构以及它们的组合机构。
但因机构中存在机械间隙、摩擦磨损以及爬行现象等,所以运动灵敏度和精度都很难达到高精度,所以该机构只适宜于中等精度。
螺旋式微动机构简图图三差动螺旋式微位移机构图四1.2.3 螺旋式微位移平台螺旋式微位移机构的结构简图如图2所示,其结构简单、制造维修方便,它是利用螺旋传动原理米获得微小直线位移,转动手轮l转动经螺杆2将螺旋运动转换为直线运动。
运动件的直线位移J与手轮转角中关系为:J=±—}·≯因此,若螺杆螺距f已定,在螺杆与螺母配研和传动平稳时,控制妒的大小即可得到微位移,其精度可达l 0 u m。
它广泛应用于微调和测量机构,如千分尺等。
为了得到更高精度的微位移,就采用如图3所示的差动螺旋式微位移机构。
它的螺杆l有两段螺距分别为,2和f,的螺纹,f2大于,。
且螺旋方向相同,则螺母2的微位移(即输出位移)s为:s=(f2一f1)/(2)式中西为手轮转角,若屯和f】分别为0.75mm和0.7mm,其差值为O.05mm,手轮的圆周刻度分划为50格,则手轮转动1格时,在螺杆与螺母配研和传动平稳以及零件达到加工精度时,运动件的位移量为1 u m。
差动螺旋式微位移机构除此之外还有采用差动螺母的形式,其工作原理类似,结构相对紧凑,但相对而言,其加工精度稍难保证,因差动螺母较难保证加工精度。
1.2.4 组合式机械传动式微位移平台凸轮式微位移机构是利用凸轮曲线的微小变化来实现运动件的微位移,其传动链短、刚性好。
螺旋一斜面微位移机构是利用螺旋微位移机构推动一斜块运动以使斜块在某一方向产生微位移。
蜗轮一凸轮式微位移机构,其原理是:主动杆蜗轮转动,经蜗轮蜗杆副减速,带动凸轮转动,再通过滚轮使运动件产生微位移。
齿轮一杠杆式微位移机构是利用手轮轴的转动,经过几级齿轮减速,变成扇形齿轮的微小转动,再通过杠杆机构将其微小转动转化为运动件的直线微位移。
此外,还有齿轮一摩擦式微位移机构和螺旋一锥轮式微位移机构等等。
但组合式微位移机构相对复杂些,一般应用于特定场合。
1.2.5 热变形式微位移平台热变形式微位移机构的微动原理是:如下图4所示,传动杆l的一端固定在机架上,另一端固定在沿导轨作微位移的零部件2上,当线圈通电加热时,使传动杆受热伸长,其伸长量为:△£=a£(t1一t0)=a£△t式中a——传动杆材料的线膨胀系数;£传动杆的长度:t1、t0——分别为被加热达到的温度和加热前的温度。
改变通入电流或者电压的值电热式微位移机构原理图图五使传动杆温度改变。
即可得到不同的微位移量d热变形式微位移机构结构、操作控制方便,与大降速比的机械传动式微位移机构相比,它的刚度高且无间隙。
但因传动杆与周围介质之间有热交换,因而影响位移精度且由于热惯性的存在以及对传动杆的冷却速度难以准确调节。
因此限制了微位移的速度,故不适宜于行程较长、频率较高的微位移。
1.2.6 弹性变形传动式微位移平台弹性变形传动式微位移机构的结构示意图及其动力学模型如图5所示,其原理是利用两个串联在一起的主动弹簧的刚度差,实现输出位移相对于输入位移的大幅度缩小,以提高输出位移的分辨率。
设主动弹簧和从动弹簧的刚度分别为K1、k2,且K2远大于L1,主动弹簧的位移(即输入位移)和从动弹簧的位移(即输出位移)分别为△X1、△X2,则:)/(*21112k k k x x +∆=∆弹性变形式微位移机构如下图图六 弹性变形式微位移机构动力学模型如下图图七 如果主动弹簧由千分尺驱动,其精度为10um ,K2=9K1,理想情况下其输出精度微1um ,如果K2与K1相差更大,则分辨率、精度更高。
该机构传动链短、摩擦力小、易获得精确位移,且其精度高、稳定性好,可用于扫描隧道显微技术(STM),及需达到原子级分辨率的高精度测量技术和光学零件的精密调整机构。
但当该机构的运动件受到为例或存在摩擦力时,这将直接影响精度,而且对于步进状态态的输入位移,容易产生过渡性震荡,所以不适宜于动态响应的情况。
1.2.7 磁致伸缩式微位移平台磁致伸缩式微位移机构的工作原理如图6所示,磁致伸缩棒1的一端固定在机座上,另一端与运动件相连,绕在伸缩棒外的线圈通电激磁后,在磁场的作用下,伸缩棒产生变形而使运动件实现微量位移,改变磁场强度可得到不同的微位移量,其精度可达亚微米。
该机构具有结构简单紧凑、重复精度高、无间隙、刚性好、转动惯量小、工作稳定性好等优点。
但其磁场强度与磁致伸缩量之间不严格成线性关系,磁场作用下还伴有发热,故微动精度不高。
它适用于精确位移调整、切削刀具的磨损补偿、温度变形补偿及自动调节系统等。
磁致伸缩式微位移机构如下图图八磁致伸缩式微位移机构1.2.8压电陶瓷式微位移平台该机构利用压电陶瓷的逆压电效应来实现微位移,改变输入电压的大小即可得到不同的微位移,它从而避免了机械结构造成的误差,所以具有结构简单、尺寸小、分辨率极高(可达纳米级)、发热少、无杂散电磁场和便于遥控等优点。
它已成功勇于高科技领域,如机器人微位移定位器、磁头、喷墨打印、扬声器和光跟踪系统以及压电式刀具补偿机构等等。
1.2.9 柔性铰链式微位移平台柔性铰链式微位移机构是今年来发展起来的一种新型的微位移机构。
种新型的微位移机构。
它是利用压电或电致伸缩器件或螺旋测微仪驱动,然后通过杠杆机构将驱动位移缩小,以实现微小位移。
如图7为螺旋测微仪驱动的柔性铰链式微位移机构,是用于微调超精密电容传感器测头与被测对象的初始间距,如果螺旋测微仪的输入位移为Ⅸ,则运动件的输出位移咒为:X0=Mx1=(1+L1/L0)(1+L3/L2)Xi式中m为杠杆机构缩小倍数,可通过改变L0、L1、L2、和L3来调节m,以得到不同的分辨率。
该类机构结构紧凑、体积很小、无机械摩擦、无间隙、无爬行、机械谐振频率高、抗振动干扰能力强、具有较高的位移分辨率(可达1纳米)。
若使用压电或电致伸缩件驱动,不仅控制简单,而且可以很容易实现亚微米甚至纳米级的精度,同时不产生噪音和发热,可适宜于各种介质环境工作,是精密机械中理想的微位移机构。
已在航空、宇航、微电子:[业部门、精密测量和微调以及生物一r程领域获得重要的应用柔性铰链式微位移平台简图图九1.2.10 直线电机式微位移平台该微位移机构直接利用直线电机作为驱动件产生微位移的机构。
直线电机具有任意的调节行程,无限的位移分辨率,所产生的力小于1000N。
采用该机构作为进给驱动系统,快速进给速度可达76m/min,进给加速度可达9.8m/S2以上。
直线电机式微位移机构不需要用机械辅助方法将旋转运动转化为直线运动,因此简化了系统的结构,从而避免了由于中间环节的弹性变形、间隙、磨损和发热等因素带来的运动误差。
其最明显的优点是响应快,可达到瞬时的高加速度和减速度。
它已在异型内圆工件的计算机控制精密车削和磨削加工中得到成功应用。
但是直线电机的成本较高、发热较严重、组成的控制系统比较复杂且存在隔磁和防磁问题,所以其应用还不很广泛。
不过随着科技的发展,直线电机的这些问题得到解决,直线电机式微位移机构将得到越来越广泛的应用。
1.2.11 其它微位移平移台此外,还有形状记忆合金(SMA)式、电致伸缩式和滚珠导轨式微位移机构等。
SMA微位移机构是利用在低温相态无论它怎样变形,只要加热到一定温度就会马上恢复到原来在高温下的形状的特点来实现微位移。
于是通过电流控制SMA的温度即可实现微位移。
它已广泛应用于机械化、电气、医疗以及高精度控制等领域。
电致伸缩式微位移机构是利用电致伸缩材料在电场作用下发生变形以实现微位移。
该机构具有施加电压低、滞后小、位移量度大、重复性好以及无老化等优点,它已广泛应用丁计量设备、微机械手、超精密加工中的误差测量和补偿。
滚珠导轨式微位移机构的结构简单、运动灵活、工艺性好、行程大、易实现较高定位精度,可用于微动台和定位装置等。
微位移机构种类很多,它们各有自己的优缺点和主要应用范围。
随着微电子技术、宇航、材料、生物工程等学科的发展,它的研究越来越受国内外的重视,且得到了迅速发展和广泛应用,但因机械加工精度、机构的复杂性、相关参数的控制精度、电磁屏蔽等目前技术水平的制约,它的应用还受到一定的限制。
不过随着相关科学的不断发展和微位移机构的深入研究,人类将研究出结构简单、高分辨率、高精度、高性能以及调试简便的微位移机构以服务于人类社会。