汽车泊车辅助系统设计
自动泊车辅助系统技术原理

自动泊车辅助系统技术原理
自动泊车辅助系统是一种智能化的汽车驾驶辅助系统,它可以通过车载摄像头、超声波传感器等设备,实现车辆自动停车、倒车入库等操作。
下面是自动泊车辅助系统技术原理的详细介绍。
一、超声波传感器检测距离
自动泊车辅助系统的核心是超声波传感器,它可以检测车辆与障碍物之间的距离。
超声波传感器会发出超声波,当超声波遇到障碍物时,会反射回来,传感器会根据反射回来的时间计算出车辆与障碍物之间的距离。
二、车载摄像头识别车位
自动泊车辅助系统还配备了车载摄像头,它可以识别停车场内的车位。
摄像头会将停车场的图像传输到车载计算机中,计算机会根据图像识别出车位的位置和大小。
三、计算机控制车辆行驶
当车主需要停车时,自动泊车辅助系统会根据摄像头识别出的车位位置和超声波传感器检测到的距离,计算出车辆需要行驶的路线和转向角度。
计算机会通过电
子控制单元控制车辆的转向、刹车和油门,实现车辆自动停车、倒车入库等操作。
四、人机交互界面
自动泊车辅助系统还配备了人机交互界面,它可以显示车辆行驶的路线和距离,提醒车主注意安全。
人机交互界面还可以根据车主的选择,自动选择最佳的停车位,提高停车的效率。
总结:自动泊车辅助系统技术原理是通过超声波传感器检测距离、车载摄像头识别车位、计算机控制车辆行驶和人机交互界面等技术实现的。
这些技术的应用,可以提高驾驶的安全性和停车的效率,为驾驶者带来更加便捷的驾驶体验。
自动泊车辅助系统方案

• 对于许多驾驶员而言,顺列式驻车是一种 痛苦的经历,大城市停车空间有限,将汽 车驶入狭小的空间已成为一项必备技能。 很少有不费一番周折就停好车的情况,停 车可能导致交通阻塞、神经疲惫和保险杠 被撞弯。
• 很多地方只让柱列式 停车
• 针对这些情况,汽车 制造商为大家考虑开 发了自动泊车系统, 这套系统可使车辆自 动驶入既定车位,消 除你在停车中遇到的 麻烦(刮蹭、停不进 去等),下面就让我 们一起了解一下自动 泊车系统。
一汽大众CC泊车过程
• 大众CC对自动泊车系统的条件 1、电子稳定程序必须打开 2、车速在10km/h--30km/h之间 3、拖车识别系统控制单元未识别到拖车(如果有) 4、空位长度>车身长度+1.4m 5、汽车与其他车位的汽车横向距离在0.5m~1.5m
上海大众途观
• 斯柯达昊锐和丰田皇冠与前面3辆车都差不 多,这里不多做介绍
优点
• 使“入门级”驾驶员轻松解决城市生活中 遇到停车的困扰,只需轻轻按下启动按钮、 坐定、放松,控制车速,其他一切即可自 动完成。减少了刮蹭、停车缓慢引起的短 时交通堵塞等情况。
缺点
• 当“入门级”驾驶员长时间依赖自动泊车 系统,如遇到损坏或驾驶没有自动泊车系 统的车辆时,就需要求助周边的“老手” 或者就是放弃车位了。此外,在我们测试 多款带自动泊车系统的车型中,证实该系 统其实不能说是完美,也会出现系统识别 错误容易出现刮蹭等问题出现,所以建议 大家不要全部依赖自动泊车系统,以免给 您带来不便。
代表车型
• 奔驰B200 • 一汽大众CC • 上海大众途观 • 斯柯达昊锐 • 丰田皇冠 • 其他车型等
奔驰B200
• 奔驰B200对此系统有2个条件: 1、路边2辆车间的距离超过5.5m 2、车速不超过36km/h
汽车泊车辅助系统设计说明
济南大学泉城学院毕业设计题目汽车泊车辅助系统设计学院工学院专业机械设计制造及其自动化(专升本)班级1502班学生高雯亭学号2015040118指导教师张兴达武华蒯建明二〇一七年五月十六日摘要随着国民经济迅猛发展,汽车保有量逐年递增。
在汽车使用过程中,泊车成为摩擦事故频发的一个环节,给人们的生命财产安全带来诸多隐患。
针对这一问题,本设计提出了一种基于单片机的汽车泊车辅助系统。
实现了泊车过程中的距离监测、报警、显示等功能,为泊车提供了可靠助力。
本设计主要包含硬件部分设计与软件部分设计。
其中硬件部分主要包含核心控制部分、信号采集部分、显示部分、报警部分。
具体工作主要有元器件选型、电路设计、电路制作及调试等。
软件部分以C语言为工具,设计了完整的程序流程框图并完成了程序编写,实现了数据接收、分析以及控制指令输出等功能,结合硬件平台实现了预期功能。
通过电路制作及调试,验证了本设计系统的有效性,为进一步的研究及应用提供了一定的数据参考。
关键词:单片机;传感器;超声波测距ABSTRACTWith the rapid development of the national economy,car ownership increased year by year. In the process of car use,parking has become a frequent part of the friction accident,to people's lives and property to bring a lot of hidden dangers. Aiming at this problem,this design proposes a vehicle parking assist system based on single chip microcomputer. To achieve the process of parking distance monitoring,alarm,display and other functions for the parking to provide a reliable power.This design mainly includes the hardware part design and the software part design. The hardware part mainly includes the core control part,the signalacquisition part,the display part,the alarm part.Specific work mainly components selection,circuit design,circuit production and debugging.The software part of the software to C language as a tool to design a complete program flow diagram and complete the program to achieve the data reception,analysis and control command output and other functions,combined with the hardware platform to achieve the desired function.Through the circuit making and debugging,the validity of the design system is verified,which provides some data reference for further research and application.Key words: single chip; sensor; ultrasonic ranging目录摘要 (III)Abstract.......................................................................................................... 错误!未定义书签。
汽车-自动泊车辅助系统技术规范
零部件子系统技术规范 自动泊车辅助系统2020年05月24日1前言本文件是根据项目规划,定义了自动泊车辅助系统基本技术要求,用于供应商报价,本文件在供应商定点之前可持续进行更改。
本文件内的信息要求严格保密,未征得同意不得将信息透露给第三方。
2术语及参考文件2.1术语` 英文解释 中文解释BSM Brake System Module 制动系统TCM Transmission Control Module 变速箱控制模块PAS Parking Aid System 泊车辅助系统CLM Climate Module 空调控制系统KL15 Ignition 点火电KL30 Battery 蓄电池电2.2参考规范序号 规范编号 名称1 乘用车高速CAN网络规范2 乘用车高速CAN网络管理规范3 乘用车诊断基础需求规范4 乘用车控制器在线刷新需求规范5 End-of Life Vehicles6 内饰散发特性评价准则7 泊车辅助系统技术标准3设计概念1) CAN BUS通讯应该满足《BQZZS3-XXXX乘用车高速CAN网络规范》,《BQZZS6-XXXX乘用车高速CAN网络管理规范》;2) 诊断功能应该满足《BQZZS5-XXXX 乘用车诊断基础需求规范》,《BQZZS7-XXXX乘用车控制器在线刷新需求规范》;3) 传感器采用内装式,且与车身同色;4)支架及传感器供货到保险杠供应商处,由保险杠供应商装配后总成供货至;5) 采用12传感器系统,可以实现平行泊车、垂直泊车、Park out功能、盲点检测功能。
4零件清单零件名称 自动泊车辅助控制器 泊车辅助传感器 泊车转向辅助传感器 支架零件号 TBD 单车用量 1 8 4 12 5技术要求5.1电气环境要求工作电压范围:9V~16V测试电压: 14 V标称电压: 12VCAN网络工作电压: 6V~16V5.2材料要求泊车辅助控制器、传感器及支架应满足2003/53/EC的要求。
智能停车辅助系统的导航与路径规划
智能停车辅助系统的导航与路径规划智能停车辅助系统是一种利用先进技术为车辆提供停车导航和路径规划的系统。
它可以帮助驾驶员快速找到可用停车位,并给予最佳的停车路线建议,从而提高停车效率,减少停车时间和资源浪费。
本文将探讨智能停车辅助系统的导航功能和路径规划技术。
一、智能停车辅助系统导航功能智能停车辅助系统的导航功能是通过利用车载GPS和地图数据来为驾驶员提供停车位的位置信息和导航指引。
当驾驶员需要找到停车位时,系统可以准确地显示附近停车场的位置,并给出最佳的导航路线。
通过语音提示和屏幕显示,驾驶员可以轻松地按照导航指引进行驾驶,避开拥堵路段,快速到达目的地。
在导航过程中,系统可以实时更新路况信息,并根据实际情况调整导航路线。
例如,当发生交通拥堵或道路封闭时,系统可以智能地计算最佳绕行路线,帮助驾驶员避开拥堵路段,节省时间和燃料消耗。
此外,智能停车辅助系统的导航功能还可以提供停车场的实时信息,如空余停车位数量和费用等。
这样,驾驶员可以提前知道目的地附近停车场的情况,避免到达后再寻找停车位的麻烦。
二、智能停车辅助系统路径规划技术路径规划是智能停车辅助系统中的核心技术之一。
它通过分析车辆的当前位置、目的地位置和路况等信息,找到最佳的停车路线。
路径规划技术的主要目标是减少行驶距离和时间,提高停车效率。
在路径规划过程中,系统首先通过地图数据和定位信息确定车辆的当前位置。
然后,根据用户输入的目的地位置,系统会计算出一条最短的行驶路线。
路径规划还会考虑其他因素,如道路限速、红绿灯等,以确保行驶的安全和顺畅。
除了基本的路径规划功能,智能停车辅助系统还可以根据驾驶员的个人偏好进行个性化的路径规划。
例如,驾驶员可以设置偏好停车场类型(室内或室外)、停车场费用范围等,系统会根据这些设置优先推荐符合要求的停车场,并规划最佳路径。
三、智能停车辅助系统的优势智能停车辅助系统的导航和路径规划功能不仅可以提高停车效率,还具有以下优势:1. 简化停车流程:智能停车辅助系统可以快速找到可用停车位,并给予最佳的导航指引,大大简化了停车流程,减少了驾驶员找停车位的时间和精力消耗。
智能后视辅助泊车系统研究与设计
将 分 析 出的 数 据 传 送 到 数 据 处 理 模 块 , 数 据 处 理 模 块 对 角度 数 据
处理, 将 角 度信 息 转 换 成 辅助 驾 驶 员泊 车 的 泊车 线 。 再 根 据 倒 车信
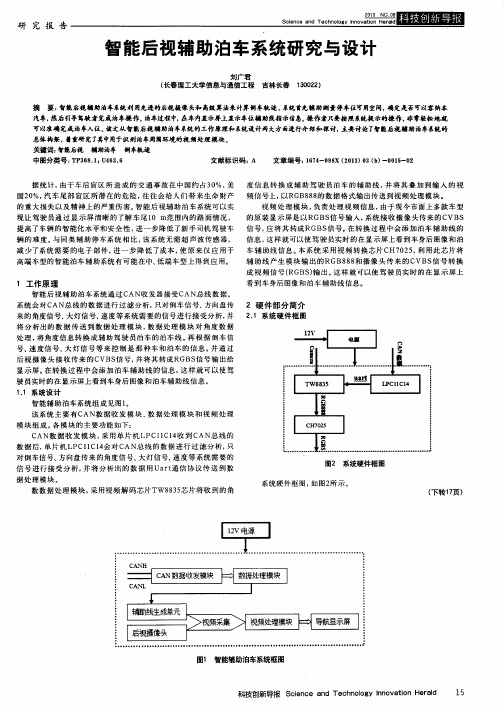
号、 速度信号、 大 灯 信 号 等 来 控 制 是 那 种 车 和 泊车 的信 息 。 并 通 过 后 视 摄 像头 接 收传 来 的 C VB S 信 号, 并 将 其 转成 RG B S 信 号 输 出给 显示屏。 在 转 换 过 程 中会 添 加 泊车 辅 助线 的 信息 , 这 样就 可 以 使驾 驶 员实 时的 在 显 示屏 上看 到车 身后 图像 和 泊 车辅 助 线 信息 。 1 . 1 系统 设计 智 能 辅助 泊 车系统 组 成 见 图I 。
该 系统 主 要 有 C AN数 据 收 发 模 块 、 数 据 处 理模 块 和 视 频 处 理 模块组成。 各 模 块 的 主要 功 能如 下 : C AN数 据 收 发 模 块 , 采 用单 片 机 L P Cl 1 Cl 4 收到C AN总 线的
数据后, 单片 机 L P Cl 1 c l 4 会对 C AN总 线 的数 据 进 行 过 滤 分 析 , 只 对 倒车 信号 、 方 向盘 传 来 的角度 信号 、 大 灯 信号、 速 度 等 系统需 要的 信 号 进 行接 受分 析, 并 将 分析 出的 数 据 用 Ua r t 通 信 协 议 传 送 到数
汽车, 然后引导驾驶 者完成泊车操作 。 泊车过程中 , 在车内显示屏上 显示车位辅助线指示信息。 操 作者只要按 照系 统提示的探 作, 非常轻松地就 可以准确 完成泊车入住。 该文从智 能后视辅助泊车系统的工作 原理和系统设 计两大方面进行介 绍和探讨, 主要讨论 了 智能后视 辅助泊车系统的
汽车自动泊车系统设计与实现

汽车自动泊车系统设计与实现随着科技的不断发展,汽车行业也在不断创新。
其中一个重要的创新是汽车自动泊车系统。
这一智能系统通过激光雷达、摄像头、传感器和电脑等技术,使汽车能够自动完成泊车操作,为驾驶员提供更加便利和安全的驾驶体验。
本文将从技术原理、系统设计和实现等方面详细介绍汽车自动泊车系统。
首先,汽车自动泊车系统的实现离不开各种传感器和技术的支持。
其中最关键的是激光雷达和摄像头。
激光雷达能够通过发射激光束来测量周围环境的距离和形状,从而确定泊车空间的大小和障碍物的位置。
摄像头则能够通过图像识别技术来判断泊车空间的规划和障碍物的位置。
除此之外,还需要传感器来检测车辆的位置、速度和方向等信息,以便系统能够做出正确的决策。
在系统设计方面,汽车自动泊车系统需要考虑多种情况和因素。
首先是泊车空间的规划和路径搜索。
系统需要根据激光雷达和摄像头的数据来确定可用的泊车空间,并且根据车辆的尺寸和转弯半径等参数来规划最优的路径。
其次是泊车动作的控制。
系统需要根据车辆和障碍物的位置来计算出最合适的转向角度和速度,以实现平稳而安全的泊车动作。
最后是监控和反馈。
系统需要实时监控车辆的位置和泊车过程中的情况,并将相关信息反馈给驾驶员,以便其能够及时做出调整和判断。
在实现方面,汽车自动泊车系统需要包括硬件和软件两个方面。
硬件方面主要包括激光雷达、摄像头和传感器等设备的安装和调试。
激光雷达需要安装在车辆的前方和侧方,以便能够有效地探测到周围环境的情况。
摄像头则需要安装在车辆的后方和侧方,以便能够准确地识别泊车空间和障碍物的位置。
传感器则需要安装在车辆的多个位置,以便能够准确地检测车辆的状态和周围环境的信息。
软件方面则需要编写相关的算法和程序,以实现泊车系统的各种功能和控制。
这些程序需要根据硬件设备提供的数据做出相应的决策和动作,以实现自动泊车的目标。
总结起来,汽车自动泊车系统是一种基于激光雷达、摄像头、传感器和电脑等技术的智能驾驶辅助系统。
停车场辅助设施工程设计(3篇)
第1篇随着城市化进程的加快,汽车保有量逐年增加,停车难问题日益凸显。
为解决这一问题,停车场辅助设施工程设计显得尤为重要。
本文将从以下几个方面阐述停车场辅助设施工程设计的重要性及设计要点。
一、重要性1. 提高停车场使用效率:合理的辅助设施设计能够使停车场空间得到充分利用,提高停车位的利用率,缓解停车难问题。
2. 保障车辆安全:完善的辅助设施可以确保车辆在停车过程中安全无忧,减少交通事故的发生。
3. 提升停车体验:良好的辅助设施设计能够为驾驶员提供便捷、舒适的停车环境,提升停车体验。
4. 优化城市交通:停车场辅助设施设计有助于缓解城市交通压力,提高道路通行效率。
二、设计要点1. 交通组织设计(1)出入口设计:合理设置出入口,确保车辆进出畅通,减少拥堵。
(2)通道设计:通道宽度应满足车辆通行需求,并考虑紧急情况下的救援通道。
(3)导视系统:设置清晰、明显的导视系统,引导驾驶员快速找到停车位。
2. 停车设施设计(1)停车位布局:根据停车需求,合理划分停车位类型,如小型车、大型车、特种车辆等。
(2)停车设备:选用合适的停车设备,如机械式停车设备、升降横移式停车设备等,提高停车位利用率。
(3)停车诱导系统:利用电子显示屏、地面指示牌等,实时显示停车位信息,引导驾驶员快速找到空余车位。
3. 安全设施设计(1)监控系统:安装高清摄像头,实现停车场24小时监控,确保车辆安全。
(2)消防设施:配备灭火器、消防栓等消防设施,防止火灾事故发生。
(3)防雷设施:安装防雷设备,保障停车场设施安全。
4. 环境设施设计(1)照明设施:设置充足的照明,确保停车场内视线清晰。
(2)绿化景观:合理布局绿化植物,美化停车场环境。
(3)排水设施:设置完善的排水系统,防止积水。
5. 智能化设计(1)智能停车系统:利用物联网、大数据等技术,实现停车场智能管理。
(2)新能源汽车充电桩:设置充电桩,方便新能源汽车充电。
总之,停车场辅助设施工程设计对于解决停车难问题具有重要意义。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
要
随着我国经济的快速发展,交通运输车辆及私家用车的不断增加,不可避免的交 通问题瞬时成为人们关注的问题。其中由于泊车事故发生的频率高,已引起了社会和 交通部门的高度重视。泊车事故发生的原因是多方面的,造成泊车时的事故率远大于 汽车正常行驶时的事故率,尤其是非职业驾驶员以及女性更为突出。而泊车事故给车 主带来许多麻烦,不仅经济上,更有人身伤害,例如撞上别人的车,如果伤及儿童更 是不堪设想,基于此基础,汽车高科技产品中,专为汽车泊位设置的“汽车泊车辅助 系统”应运而生,汽车泊车辅助系统的加装可以解决司机的不少麻烦,大大降低了泊 车事故的频率。 由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经 常用于距离的测量。利用超声波检测往往比较迅速、方便、计算简单、易于做到实时 控制,并且在测量精度方面能达到工业实用的要求。本系统工作过程中超声波发射器 发出一系列的脉冲信号,由单片机对接收的信号依据时间差进行处理,自动计算出车 与障碍物之间的距离。超声波测距原理简单,成本低,制作方便,但其传输速度受天 气影响较大,不能精确测距;因此大都用于汽车倒车雷达等近距离测距中本文根据声 波在空气中传播反射原理,以超声波换能器为接口部件 该设计由超声波发射模块、信号接收模块、单片机处理模块、数码显示以及声光 报警显示模块等部分组成,文中详细介绍了测距器的硬件组成、检测原理、方法以及 软件结构。 接收电路使用 NE5532 及 LM311 芯片对回波信号进行整波, 对衰减后的信号 进行了放大和整波,更好的实现了超声波的接受,对单片机提供外部中断信号。
关键词:超声波;报警;AT89S52;设计;调试
evelopment of our economy, transportation vehicles and private cars, inevitably increase traffic problems instantaneous become people concern. The accident happened because of high frequency meter has attracted social and communications departments are highly valued. Parking the cause of the accident is various, the accidents caused by parking when normally running far outweigh its car accident rates, especially the female driver and nonprofessional is more prominent. And parking accident brings a lot of trouble for owners, not only economically, more personal injury, such as hitting someone else's car, if injury and children is unimaginable, based on this foundation, car high-tech product, designed for car parking garages Settings "car auxiliary system" appeared, car parking auxiliary system can solve the driver with a lot of trouble, and greatly reduce the frequency of parking accident. Due to the strong ultrasonic directivity slowly, and energy consumption in a medium transmission distance is farther, thus ultrasonic often used for distance measurement. Using ultrasonic detection tend to be quick, convenient, simple calculation, easy to achieve real-time control, and the precision in the measurement of industrial practical requirement can achieve. This system work process issued a series of ultrasonic pulse signal transmitter, by SCM according to receive the signal processing, automatic calculation lag between the distance between the car and the obstacles. Ultrasonic ranging principle, low cost, simple production convenient, but its transmission speed greatly influenced by the weather, not accurate location; So mostly used in automobile reverse radar etc close ranging according to airborne sound in ultrasonic transducer, reflected in the principle for interface components This design by ultrasound module, the signal receiving module and single-chip microcomputer processing module, digital display and the acousto-optic alarm display module components, this paper introduces in detail the range finder hardware composition, measuring principle, method and software structure. Receiving circuit NE5532 and LM311 chips used to echo signal of the wave, the attenuation of signal amplifier and the whole wave, better realize the ultrasound accepted, the SCM provide external interrupt signal. Keywords: ultrasonic; Alarm; AT89S52 devices; Design; debugging