数学建模椅子平衡问题 蜗牛爬行问题 船渡河问题
数学建模案例
2021/10/10
13
建模示例五:轮廓模型
轮廓模型是以量纲模型为基础,利用量 的比例关系而构造简单数学模型的一种方法。 因为这种比例关系比较粗糙,因而成为轮廓 模型。
(货物的包装成本)在超市中可以看到许 多商品(如面粉、白糖、奶粉等)都以包装 的形式出售,同一种商品的包装也经常有大 小不同的规格,出售的价格也高低不同。下 表是一些例子。
周 期 中 南 北 方 向 亮 红 灯 的 比 率 是 t/T,需 停 车 等 待 的 车 辆
数 是 V t/T.这 些 车 辆 等 待 时 间 最 短 为 0(刚 停 下 ,红 灯 就 转
换 为 绿 灯 ),最 长 为 t(到 达 路 口 时 ,绿 灯 刚 转 换 为 红 灯 ),由 假
设 2"车 流 量 均 匀 "可 知 ,它 们 的 平 均 等 待 时 间 是 t/2.由 此 可
它 也 是 货 物 量 的 减 函 数 .因 而 当 包 装 比 较 大 时 单 位 重 量 货物的成本的减低将越来越慢.
我们来计算总的节省率,即购买单位包装的商品的
花 费 随 着 包 装 的 增 大 而 改 变 的 速 率 r ( ) (q / 3) 1/3 , 它
仍 然 是 的 减 函 数 .这 说 明 总 的 节 省 率 也 是 随 着 所 包 装 的
1588)2 27
27(152 88
882 272
)1588
12
当t
88 30 30 24
48.8889时,ymin
587(秒).
由此可见,我们计算所得的结果和同学们实际观测
到的数据是比较接近的.这也说明此路口红灯与绿灯设
置的时间比较合理.
评 注: 由上述结果可知,两个方向绿灯时间之比恰好等于
数学建模作业1 长方形椅子能在不平的地面上放稳吗?
注意到椅脚连线呈长方形,长方形是中心对称图形,绕它的对称中心旋转180度后,椅子仍在原地。
把长方形绕它的对称中心O旋转,这可以表示椅子位置的改变。
于是,旋转角度θ这一变量就表示了椅子的位置。
为此,在平面上建立直角坐标系来解决问题。
如下图所示,设椅脚连线为长方形ABCD,以对角线AC所在的直线为x轴,对称中心O为原点,建立平面直角坐标系。
椅子绕O点沿逆时针方向旋转角度θ后,长方形ABCD转至A1B1C1D1 的位置,这样就可以用旋转角θ(0≤θ≤π)表示出椅子绕点O旋转θ后的位置。
其次,把椅脚是否着地用数学形式表示出来。
我们知道,当椅脚与地面的竖直距离为零时,椅脚就着地了,而当这个距离大于零时,椅脚不着地。
由于椅子在不同的位置是θ的函数,因此,椅脚与地面的竖直距离也是θ的函数。
由于椅子有四只脚,因而椅脚与地面的竖直距离有四个,它们都是θ的函数。
而由假设(3)可知,椅子在任何位置至少有三只脚同时着地,即这四个函数对于任意的θ,其函数值至少有三个同时为0。
因此,只需引入两个距离函数即可。
考虑到长方形ABCD是中心对称图形,绕其对称中心 O沿逆时针方向旋转180°后,长方形位置不变,但A,C和B,D对换了.因此,记A、B两脚与地面竖直距离之和为f(θ),C、D两脚与地面竖直距离之和为g(θ),其中θ∈[0,π],从而将原问题数学化。
数学模型:已知f(θ)和g(θ)是θ的非负连续函数,对任意θ,f(θ)•g(θ)=0,证明:存在θ0∈[0,π],使得f(θ0)=g(θ0)=0成立。
五、模型求解(显示模型的求解方法、步骤及运算程序、结果)如果f(0)=g(0)=0,那么结论成立。
如果f(0)与g(0)不同时为零,不妨设f(0)>0,g(0)=0。
此时,将长方形ABCD。
数学建模题目及答案解析
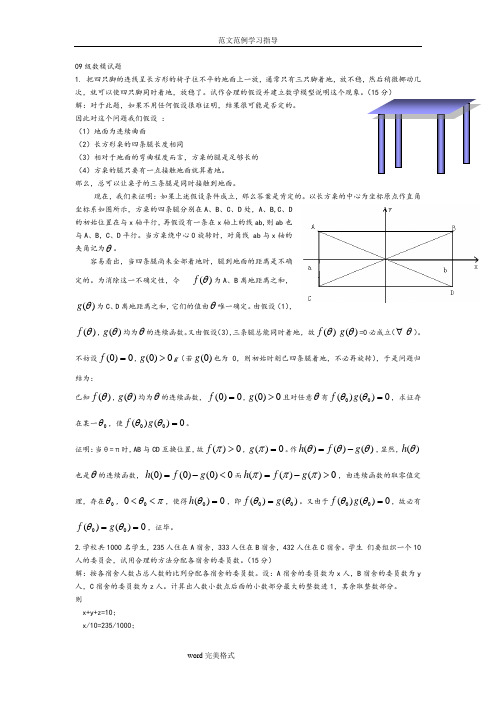
09级数模试题1. 把四只脚的连线呈长方形的椅子往不平的地面上一放,通常只有三只脚着地,放不稳,然后稍微挪动几次,就可以使四只脚同时着地,放稳了。
试作合理的假设并建立数学模型说明这个现象。
(15分) 解:对于此题,如果不用任何假设很难证明,结果很可能是否定的。
因此对这个问题我们假设 : (1)地面为连续曲面(2)长方形桌的四条腿长度相同(3)相对于地面的弯曲程度而言,方桌的腿是足够长的 (4)方桌的腿只要有一点接触地面就算着地。
那么,总可以让桌子的三条腿是同时接触到地面。
现在,我们来证明:如果上述假设条件成立,那么答案是肯定的。
以长方桌的中心为坐标原点作直角坐标系如图所示,方桌的四条腿分别在A 、B 、C 、D 处,A 、B,C 、D 的初始位置在与x 轴平行,再假设有一条在x 轴上的线ab,则ab 也与A 、B ,C 、D 平行。
当方桌绕中心0旋转时,对角线 ab 与x 轴的夹角记为θ。
容易看出,当四条腿尚未全部着地时,腿到地面的距离是不确定的。
为消除这一不确定性,令()f θ为A 、B 离地距离之和,()g θ为C 、D 离地距离之和,它们的值由θ唯一确定。
由假设(1),()f θ,()g θ均为θ的连续函数。
又由假设(3),三条腿总能同时着地, 故()f θ()g θ=0必成立(∀θ)。
不妨设(0)0f =,(0)0g >g (若(0)g 也为0,则初始时刻已四条腿着地,不必再旋转),于是问题归结为: 已知()f θ,()g θ均为θ的连续函数,(0)0f =,(0)0g >且对任意θ有00()()0f g θθ=,求证存在某一0θ,使00()()0f g θθ=。
证明:当θ=π时,AB 与CD 互换位置,故()0f π>,()0g π=。
作()()()h f g θθθ=-,显然,()h θ也是θ的连续函数,(0)(0)(0)0h f g =-<而()()()0h f g πππ=->,由连续函数的取零值定理,存在0θ,00θπ<<,使得0()0h θ=,即00()()f g θθ=。
渡河问题的数学模型解决方法
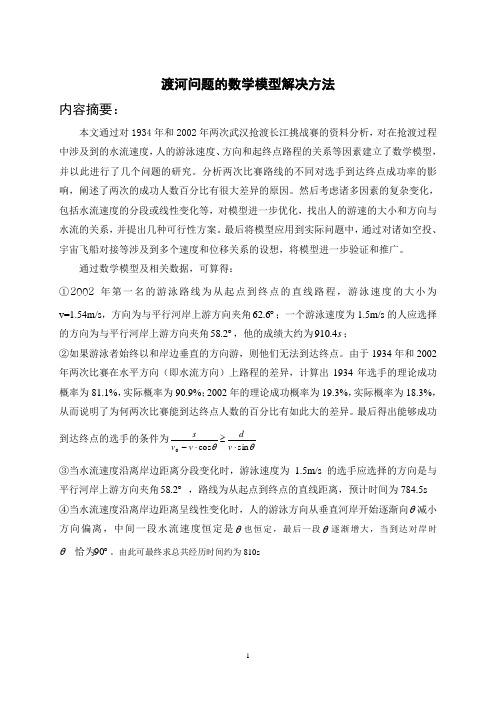
渡河问题的数学模型解决方法内容摘要:本文通过对1934年和2002年两次武汉抢渡长江挑战赛的资料分析,对在抢渡过程中涉及到的水流速度,人的游泳速度、方向和起终点路程的关系等因素建立了数学模型,并以此进行了几个问题的研究。
分析两次比赛路线的不同对选手到达终点成功率的影响,阐述了两次的成功人数百分比有很大差异的原因。
然后考虑诸多因素的复杂变化,包括水流速度的分段或线性变化等,对模型进一步优化,找出人的游速的大小和方向与水流的关系,并提出几种可行性方案。
最后将模型应用到实际问题中,通过对诸如空投、宇宙飞船对接等涉及到多个速度和位移关系的设想,将模型进一步验证和推广。
通过数学模型及相关数据,可算得:①2002年第一名的游泳路线为从起点到终点的直线路程,游泳速度的大小为v=1.54m/s ,方向为与平行河岸上游方向夹角︒6.62;一个游泳速度为1.5m/s 的人应选择的方向为与平行河岸上游方向夹角︒2.58,他的成绩大约为s 4.910;②如果游泳者始终以和岸边垂直的方向游,则他们无法到达终点。
由于1934年和2002年两次比赛在水平方向(即水流方向)上路程的差异,计算出1934年选手的理论成功概率为81.1%,实际概率为90.9%;2002年的理论成功概率为19.3%,实际概率为18.3%,从而说明了为何两次比赛能到达终点人数的百分比有如此大的差异。
最后得出能够成功到达终点的选手的条件为θθsin cos 0⋅≥⋅-v d v v s ③当水流速度沿离岸边距离分段变化时,游泳速度为 1.5m/s 的选手应选择的方向是与平行河岸上游方向夹角︒2.58 ,路线为从起点到终点的直线距离,预计时间为784.5s ④当水流速度沿离岸边距离呈线性变化时,人的游泳方向从垂直河岸开始逐渐向θ减小方向偏离,中间一段水流速度恒定是θ也恒定,最后一段θ逐渐增大,当到达对岸时︒90恰为 θ。
由此可最终求总共经历时间约为 810s一.基本模型建立设水速为v 0,垂直于岸边的距离为d,平行于岸边的位移为s ,人的速度为v,出发方向与河岸平行方向夹角为θ,整个运动时间为t ,起点至终点的直线距离为l ,如图所示:若人要恰好从起点到达终点,则有: θθsin cos 0⋅==⋅-v d t v v s 二.模型假设1.不考虑温度(气温、水温)及水中除水速外其他因素对选手速度的影响;2.由于在实际情况中,风力对人的影响比对水的影响要小得多,而风对水的影响在水速中已经体现,因此不考虑风力对人的直接影响;3.假设1934年和2002年两次比赛具有相同的外界条件,即具有相同的水流速度;4.开始人以某一初速度沿固定方向向对岸游,则只要满足人刚到达对岸的地点在终点的上游,就可以认为此人能够到达终点;5.θ的范围是]180,0[︒,在开始时所有选手向各个方向起跳的机率相同。
数学建模课件
• 四条腿一样长,椅脚与地面点接触,四 脚连线呈正方形;
• 地面高度连续变化,可视为数学上的连续 曲面; • 地面相对平坦,使椅子在任意位置至少 三只脚同时着地。
模型构成
用数学语言把椅子位置和四只脚着地的关系表示出来
• 椅子位置
利用正方形(椅脚连线)的对称性
B´ B A´
用(对角线与x轴的夹角)表示椅子位置 • 四只脚着地 椅脚与地面距离为零 距离是的函数 四个距离 (四只脚) 两个距离
(7)寻找可行的渡河方式
问题的推广
这个问题的求解主要应用向量表示状态和过河方式, 并结合图论的方法找到渡河方式。 图论广泛应用于各个领域,如交通规划、城市规划 人工智能、计算机网络等。与这个问题类似的问题有: 设备更新问题、双马换位问题等。 双马换位问题:3*4棋盘,有三个红马和三个黑马, 摆放在两边。这些马都是中国象棋里的马,只能走‘日’ 字,且受蹩腿限制。如果红马和黑马两方换着走,至少 走多少步才能将两种马的位置调换?(如图)
该模型属于数学分析模型,这类模型同样广泛应用 于各个领域。其中两个比较著名的例子为: 身份识别中的指纹识别技术; 医学中的CT成像技术。
由 f, g的连续性知 h为连续函数。
据连续函数的基本性质: 必存在0 , 使h(0)=0, 即f(0) = g(0) . 因为f() • g()=0, 所以f(0) = g(0) = 0.
假设条件的本质与非本质
考察四脚呈长方形的椅子
问题的推广
这个问题的求解主要应用函数表示椅子和地面的位 置关系,并应用中值定理证明原命题。
例2 工作安排问题
有一份中文说明书需要翻译成英、日、德、法、 俄五种语言。现有甲、乙、丙、丁、戊四个翻译 家,他们将这份说明书翻译成不同的语言所需要 的时间各不相同,如下表所示。
数学建模实验一

基本实验1.椅子放平问题依照1.2.1节中的“椅子问题”的方法,将假设中的“四腿长相同并且四脚连线呈正方形”,改为“四腿长相同并且四脚连线呈长方形”,其余假设不变,问椅子还能放平吗?如果能,请证明;如果不能,请举出相应的例子。
解答:1、模型假设对椅子和地面作出如下假设:(1)椅子:四腿长相同且四脚连线呈长方形;(2)地面:略微起伏不平的连续变化的曲面;(3)着地:点接触,在地面任意位置处椅子应至少有三只脚同时落地。
上述假设表明长方椅是正常的,排除了地面有坎以及有剧烈升降等异常情况。
2、模型建立令AB 两脚,CD 两脚与地面距离分别为()θf 和()θg ,则该问题归结为:已知连续函数()0≥θf ,()0≥θg ,若()0>θf ,g(0)=0,则一定存在()πθ,01∈,使得()()011==θθg f3、模型求解证明:令πθ=(即旋转180°,对角线AC 和BD 互换),则()0=πf ,()0>πg .定义()()()θθθg f h -=,得到()()00=πh h ,根据连续函数的零点定理,则存在()πθ,01∈,使得()()()0111=-=θθθg f h结合条件()()011=θθg f ,从而得到()()011==θθg f即四点均在地面上,得证。
2.过河问题依照1.2.2节“商人安全过河”的方法,完成下面的智力有戏:人带着猫、鸡、米过河,船除需要人划之外,至多能载猫、鸡、米之一,而当人不在场时,猫要吃鸡、鸡要吃米。
试设计一个安全过河的方案,并使渡河的次数尽量地少。
解:1、模型建立设:xi,其中i表示:人:i=1 猫:i=2 鸡:i=3 米:i=4在此岸:xi =1 在对岸:xi =0此岸状态为:s=(x1,x2,x3,x4)对岸状态为:s’=(1- x1,1- x2,1- x3,1- x4)乘船方案为:d=(u1,u2,u3,u4)在船上时:ui=1不在船上时:ui=0第k次渡河前此岸的状态为:sk第k次渡河的决策为:dk允许状态集合为:S={(1,1,1,1),(1,1,1,0),(1,1,0,1),(1,0,1,1),(1,0,1,0)}允许决策集合为:D={(1,1,0,0),(1,0,1,0),(1,0,0,1),(1,0,0,0)}状态转移率为:sk+1= sk +(-1)k dk设计安全过河方案归结为求决策序列d1,d2,…, dn∈D,使状态sk ∈S按状态转移律由初始状态s1=(1,1,1,1)经n步达到sn+1=(0,0,0,0)2、模型求解因此,我们可得到如下方案:当k=1时,s1=(1,1,1,1);d1=(1,0,1,0)当k=2时,s2=(0,1,0,1);d2=(1,0,0,0)当k=3时,s3=(1,1,0,1);d3=(1,0,0,1)当k=4时,s4=(0,1,0,0);d4=(1,0,1,0)当k=5时,s5=(1,1,1,0);d5=(1,1,0,0)当k=6时,s6=(0,0,1,0);d6=(1,0,0,0)当k=7时,s7=(1,0,1,0);d7=(1,0,1,0)当k=8时,s8=(0,0,0,0)所以,通过比较,选择的最优方案为:人先带鸡过河,然后人再回来,把米带过河,然后把鸡运回河岸,人再把猫带过河,最后人回来把鸡带过去。
数学建模题目及答案解析
09级数模试题1. 把四只脚的连线呈长方形的椅子往不平的地面上一放,通常只有三只脚着地,放不稳,然后稍微挪动几次,就可以使四只脚同时着地,放稳了。
试作合理的假设并建立数学模型说明这个现象。
(15分) 解:对于此题,如果不用任何假设很难证明,结果很可能是否定的。
因此对这个问题我们假设 : (1)地面为连续曲面(2)长方形桌的四条腿长度相同(3)相对于地面的弯曲程度而言,方桌的腿是足够长的 (4)方桌的腿只要有一点接触地面就算着地。
那么,总可以让桌子的三条腿是同时接触到地面。
现在,我们来证明:如果上述假设条件成立,那么答案是肯定的。
以长方桌的中心为坐标原点作直角坐标系如图所示,方桌的四条腿分别在A 、B 、C 、D 处,A 、B,C 、D 的初始位置在与x 轴平行,再假设有一条在x 轴上的线ab,则ab 也与A 、B ,C 、D 平行。
当方桌绕中心0旋转时,对角线 ab 与x 轴的夹角记为θ。
容易看出,当四条腿尚未全部着地时,腿到地面的距离是不确定的。
为消除这一不确定性,令()f θ为A 、B 离地距离之和,()g θ为C 、D 离地距离之和,它们的值由θ唯一确定。
由假设(1),()f θ,()g θ均为θ的连续函数。
又由假设(3),三条腿总能同时着地, 故()f θ()g θ=0必成立(∀θ)。
不妨设(0)0f =,(0)0g >g (若(0)g 也为0,则初始时刻已四条腿着地,不必再旋转),于是问题归结为: 已知()f θ,()g θ均为θ的连续函数,(0)0f =,(0)0g >且对任意θ有00()()0f g θθ=,求证存在某一0θ,使00()()0f g θθ=。
证明:当θ=π时,AB 与CD 互换位置,故()0f π>,()0g π=。
作()()()h f g θθθ=-,显然,()h θ也是θ的连续函数,(0)(0)(0)0h f g =-<而()()()0h f g πππ=->,由连续函数的取零值定理,存在0θ,00θπ<<,使得0()0h θ=,即00()()f g θθ=。
数学建模培训椅子问题2

河
小船(至多2人) 3名商人
3名随从
但是乘船渡河的方案由商人决定. 商人们怎样才能安全过河?
问题分析
多步决策过程
决策~ 每一步(此岸到彼岸或彼岸到此岸)船上的人员 要求~在安全的前提下(两岸的随从数不比商人多),经有 限步使全体人员过河.
质, 必存在0 , 使h(0)=0, 即f(0) = g(0) . 因为f() • g()=0, 所以f(0) = g(0) = 0.
评注和思考 建模的关键 ~ 和 f(), g()的确定
假设条件的本质与非本质 考察四脚呈长方形的椅子
1.3.2 商人们怎样安全过河
问题(智力游戏)
模型构成
xk~第k次渡河前此岸的商人数 yk~第k次渡河前此岸的随从数 sk=(xk , yk)~过程的状态 xk, yk=0,1,2,3; k=1,2, S ~ 允许状态集合
S={(x , y) x=0, y=0,1,2,3; x=3, y=0,1,2,3; x=y=1,2}
uk~第k次渡船上的商人数
证明:存在0,使f(0) = g(0) = 0.
模型求解
给出一种简单、粗糙的证明方法
将椅子旋转900,对角线AC和BD互换。 由g(0)=0, f(0) > 0 ,知f(/2)=0 , g(/2)>0. 令h()= f()–g(), 则h(0)>0和h(/2)<0.
由 f, g的连续性知 h为连子能在不平的地面上放稳吗
放稳 ~ 四只脚着地
问题分析 通常 ~ 三只脚着地 模 型 假 设
• 四条腿一样长,椅脚与地面点接触,四脚 连线呈正方形; • 地面高度连续变化,可视为数学上的连续 曲面; • 地面相对平坦,使椅子在任意位置至少三 只脚同时着地。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 椅子能在不平的地面上放稳得问题的拓展.
模型假设对椅子和地面应该作一些必要的假设:
1.椅子的四条腿一样长,椅脚与地面接触处可视为一个点。
四脚的连线呈长方
形。
2.地面高度是连续变化的,沿任何方向都不会出现间断,即地面可视为数学上
连续曲面。
3.对于脚的间距和椅腿的长度而言,地面时相对平坦的,使椅子在任何位置至
少有三个脚同时着地。
模型构成中心问题是用数学语言把椅子的四只脚同时着地的条件和结论表示出来。
首先要用变量把椅子的位置,注意到椅脚连线呈长方形。
以中心为对称点,长方形绕中心的旋转正好代表了椅子位置的改变,于是因此可以用旋转角度这一变量表示椅子的位置。
在图中椅
线B’D’与X轴重合,椅子绕中
心点O轴旋转角度θ后。
长方形
A’B’C’D’转至ABCD位置。
用
θ(对角线与x 轴的夹角)表示
椅子位置,椅脚与地面距离为θ
的函数.A,C 两脚与地面距离之
和 ~ f (θ,),B,D 两脚与地面距
离之和 ~ g (θ)
地面为连续曲面 F (θ) , g (θ)
是连续数.椅子在任意位置至少
三只脚着地.对任意θ, f (θ ),
g (θ )至少一个为0.
已知: f (θ ) , g (θ )是连
续函数 ;
对任意θ, f (θ)
• g (θ )=0 ;
且g (0)=0, f
(0) > 0.
证明:存在θ0,使 f (θ0) = g (θ0) = 0.
模型求解
证明;设长方形的长为a ,宽为b。
将椅子旋转θ=2arctanb/a,对角线AC取代BD的位置。
由g(0)=0,f(0) > 0 ,知f(2arctanb/a)=0 ,g(2arctanb/a )>0.或,g
(2arctanb/a )=0
(1)f(2arctanb/a)=0 ,g(2arctanb/a )=0
,桌子能放平衡。
(2)f(2arctanb/a)=0 ,g(2arctanb/a )>0
令h(θ)= f(θ)–g(θ), 则h(0)>0和h(2arctanb/a)<0.
由 f, g的连续性知 h为连续函数, 据连续函数的基本性质, 必存在θ0 , 使
h(θ0)=0, 即f(θ0) = g(θ0) .
因为f(θ) • g(θ)=0, 所以f(θ0) = g(θ0) = 0.
第一题
一根1米长的水平弹性绳子,存在A端和B端。
A端固定,B端每秒钟10cm的速度水平向前延伸。
假设绳子永远不会断。
一只蜗牛从绳的A端开始向B端爬,蜗牛相对绳子的速度为每秒钟1cm。
假设蜗牛不知疲倦,生命永恒;现在,蜗牛爬的同时,绳子开始变长,请问:
1)蜗牛是否可以爬到B端,要多久?
2)是否蜗牛只要速度大于0,不论绳子多快,都可以爬到头?
① B点的位置随时间变化的函数
S
B
= 100 + 10t
②虫子的速度v
w 与其初始速度v
,自身的位置S
w
以及时间t的关系函数
③对②式两边依时间t从0到∞积分即
化简得
其中,初始条件为:
S w (0) = 0
即虫子在一开始的时候位
置为0
用Matlab 求解上式的一阶微分方程。
Dsolve('DS-S/(10+t)-v=0','S(0)=0') ans =
10*v*log(10+t)+v*log(10+t)*t-10*v*log(2)-10*v*log(5)+(-v*log(2)-v*log(5))*t 所以,虫子的位置S w 关于时间t 和初速度v 0的关系函数为:S w =10* v 0*log(10+t)+ v 0*log(10+t)*t-10*
v 0*log(2)-10*v 0*log(5)+(- v 0*log(2)- v 0*log(5))*t
④ 由1)式可知,要让虫子到达B 点,则有S w = S B ,即有对数方程
10* v 0*log(10+t)+ v 0*log(10+t)*t-10* v 0*log(2)-10*v 0*log(5)+(- v 0*log(2)- v 0*log(5))*t=100+10t
⑤ 再次使用Matlab 脚本求解上式的对数方程:
Solve('10*v*log(10+t)+v*log(10+t)*t-10*v*log(2)-10*v*log(5)+(-v*log(2)-v*log(5))*t =100+10*t','t')
ans = exp((10+v*log(10))/v)-10
⑥所以,虫子到达B 点的时间t 与其自身的初速度v 0之间的关系函数为: t==exp((10+ v 0*log(10))/ v 0)-10
⑦由此可见,只要虫子的初速度v 0>0,它总有一天能到达B 点的,再次使用Matlab 脚本体现t 与v 0的关系图: v = 0:100;
t=exp((10+v.*log(10))./v)-10; plot(v,t);
digits(10);t=vpa(exp(10+log(10))-10)
t =220254.6579
220254.6579/3600/24
ans = 2.5492
所以,虫子在两天半之后到达B点
第二题
两艘轮船在同一时刻驶离河的两岸,一艘从A驶往B,另一艘从
B开往A,其中一艘开得比另一艘快些,因此它们在距离较近的岸500
公里处相遇。
到达预定地点后,每艘船要停留15分钟,以便让乘客
上下船,然后它们又返航。
这两艘渡轮在距另一岸100公里处重新相遇。
试问河有多宽?
模型假设:自然界的外界因素都不影响船的行驶速度。
模型构成:设快船的速度为V,慢船的速度为V’.船两次相遇的距离为X。
快船从A岸出发,慢船从B岸出发。
则第一次相遇时,慢船距离B岸的距离为500公里,第二次相遇时,距离A岸的距离为100公里。
求两岸的距离h。
模型求解:
②
由①②得
x=800,-600负根舍去
得 x=800
h=800+500+100=1400
即两岸的距离为1400公里。
x
. 。