WIFI_ROBOT_原理图
工业无线遥控器原理图

工业无线遥控器原理图
很抱歉,作为语言模型,我无法直接给出图片或绘制原理图。
以下是一种可能的描述工业无线遥控器的原理图的方式,希望可以对你有所帮助:
在工业无线遥控器的原理图中,主要包含以下几个组成部分:
1. 电源部分:包括电池或电源适配器,用来为整个遥控器系统提供电能。
2. 发射器:由微控制器(MCU)和无线发射模块组成。
微控
制器负责处理用户的输入信号,并控制无线发射模块发送信号。
3. 接收器:由无线接收模块和微控制器组成。
无线接收模块接收到发射器发送的信号并将其转化为数字信号,微控制器对接收到的信号进行处理。
4. 控制器:由微控制器和相关电路组成,用于处理用户输入的信号,并根据输入信号的不同控制相应的输出信号。
5. 输出部分:根据控制器的指令,通过继电器、驱动电路或其他控制装置,实现对被控制设备的控制,例如启动、停止、加速、减速等。
6. 维护部分:包含供电指示灯、工作状态指示灯、报警装置等,用于提供遥控器本身的状态信息,以及为用户提供操作反馈等。
以上是一般工业无线遥控器的原理图的主要组成部分,具体的原理图可能会因产品设计和应用需求的不同而有所差异。
DIY制作会呼吸的WIFI机器人

DIY制作会呼吸的WIFI机器人2012-08-22 14:35错误!DIYer: sfwer 制作时间: 2天制作难度: ★★★★☆GEEK指数: ★★★★☆首先需要解释一下什么是“Shy ”:“Shy ”是一个采用LINUX开源系统-Openwrt制作的WIFI机器人,它支持PC端,android端,web端的无线控制和无线视频传输,apple端的视频传输,甚至还可以当作你的电脑高清免驱动摄像头使用。
技术上来说,它大致分为三个部分,首先是加载Openwrt系统的Liunx平台,它连接摄像头,并通过WIFI接收控制命令。
然后此平台通过串口连接单片机,再由单片机控制各种感应,驱动电路。
你可以在手机上指挥它到处跑,然后拍下想要的照片。
值得注意的是,openwrt系统是开源的,我们可以在PC机上编译自己的openwrt系统和自己的软件,另外单片机的扩展应用成千上万,因此这架机器人具有相当高的可玩性与非常广泛的应用。
∙错误!shy的原型来自于《star wars》中的R2D2。
∙错误!机器人的主题是“呼吸”,缓慢变化的蓝光使它们成为你卧室中最酷的装置。
错误!错误!错误!双向电梯∙∙∙∙∙∙∙∙∙∙∙∙∙首先要选择能够加载Openwrt平台的硬件设备,其实能加载LINUX系统的设备非常常见,比如我们家庭用的路由器。
这里要注意的是路由器的选择,首先,路由器要能够加载openwrt系统,其次,要具有USB口以及TTL接口。
∙错误!一般来讲,我们选择的型号是DB120或者RG100A-AA,我选择的型号是RG100A-AA。
∙错误!得到路由器后,首先要做的事是给路由器换个系统,即通俗所说的“刷机”,关于网络上RG100A-AA刷机的教程很多,这里不再赘述,不过需要补充的是,对于拥有单片机的爱好者,大可不必专门购买USB-TTL线,我们手中的单片机的开发板就可以为路由器与个人PC进行连接,下面给出开发板与路由器TTL线的连线图,,路由器从左到右依次是:VCC ,GND ,TX ,RX,这里注意一定不要接VCC线。
WIFI-ROBOT设计心得之刷路由篇(大亚DB120)第一篇
Wifi-robot小车制作详解(51版)本人穷人买不起论坛的板子,凭证有点单片机基础,参考论坛很多牛人自己设计主控板我用的是DB120 b1的路由器二手的。
论坛的帖子实在太多了,我看了好久才弄个差不多。
因此写个详细的,方便新手DIY。
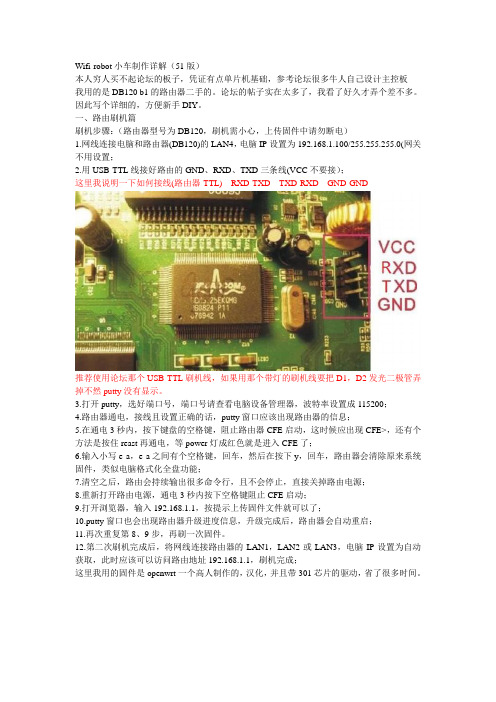
一、路由刷机篇刷机步骤:(路由器型号为DB120,刷机需小心,上传固件中请勿断电)1.网线连接电脑和路由器(DB120)的LAN4,电脑IP设置为192.168.1.100/255.255.255.0(网关不用设置;2.用USB-TTL线接好路由的GND、RXD、TXD三条线(VCC不要接);这里我说明一下如何接线(路由器-TTL) RXD-TXD TXD-RXD GND-GND推荐使用论坛那个USB-TTL刷机线,如果用那个带灯的刷机线要把D1,D2发光二极管弄掉不然putty没有显示。
3.打开putty,选好端口号,端口号请查看电脑设备管理器,波特率设置成115200;4.路由器通电,接线且设置正确的话,putty窗口应该出现路由器的信息;5.在通电3秒内,按下键盘的空格键,阻止路由器CFE启动,这时候应出现CFE>,还有个方法是按住reast再通电,等power灯成红色就是进入CFE了;6.输入小写e a,e a之间有个空格键,回车,然后在按下y,回车,路由器会清除原来系统固件,类似电脑格式化全盘功能;7.清空之后,路由会持续输出很多命令行,且不会停止,直接关掉路由电源;8.重新打开路由电源,通电3秒内按下空格键阻止CFE启动;9.打开浏览器,输入192.168.1.1,按提示上传固件文件就可以了;10.putty窗口也会出现路由器升级进度信息,升级完成后,路由器会自动重启;11.再次重复第8、9步,再刷一次固件。
12.第二次刷机完成后,将网线连接路由器的LAN1,LAN2或LAN3,电脑IP设置为自动获取,此时应该可以访问路由地址192.168.1.1,刷机完成;这里我用的固件是openwrt一个高人制作的,汉化,并且带301芯片的驱动,省了很多时间。
基于51单片机WiFi智能小车制作
基于51单片机WiFi智能小车制作基于51单片机WiFi智能小车制作一、基本原理51单片机WiFi智能小车是利用PC或手机作为控制端,通过手机连接wifi模块(路由器)以获得wifi信号,同时车载也连接wifi模块以获得和手机相同的IP地址,实现手机和小车的连接,然后利用PC或手机上的控制软件以wifi网络信号为载体发送相关信号,wifi模块接收PC 或手机端发送来的相关信号并分析转换成TTL 电平信号,然后发送给单片机,单片机接收到的电平信号处理、分析、计算,转化成控制指令并发送给电机驱动模块以实现小车的前进、后退、左拐、右拐等功能。
二、购买所需材料了解51单片机WiFi智能小车基本原理后,需要购买所需材料进行制作。
下面列出所需制作材料:序号材料备注图例6 小车底盘7 摄像头 根据固件支持摄像头购买8 电源根据自己需要购买种类9 杜邦线及小配件制作所需工具:序号工具名备注图例称1 电烙铁一套 包括松香焊锡2 螺丝刀 平口、十字等3 微型电钻 可以自制4手工刀5 剪刀6 万用表7 热熔胶枪或快干胶8US B下载器三、开始制作1、制作流程开始制作前,我们首先需要看购买路由器的型号,笔者采用的是703n 路由器,所以需要引出ttl 线。
总体步骤为:路由器引TTL 线→路由器刷OpenWrt 固件→制作51单片机最小系统→下载下位机程序到51单片机→安装上位机程序至PC 或手机→测试上、下位机通信→组装→调试完成。
2、路由器引ttl线首先打开703n路由器,按照下图标示位置焊接ttl线。
注意:1、焊接的时候要小心焊接,焊好后微拉下查看松紧2、焊接最好采用软线焊接,防止意外整块拉掉焊点3、焊好后一定用胶固定,最好采用热熔胶下图为引好ttl线样子3 刷OpenWrt固件何为OpenWrt固件,OpenWrt可以被描述为一个嵌入式的Linux 发行版,(主流路由器固件有dd-wrt,tomato,openwrt三类)而不是试图建立一个单一的,静态的系统。
基于WiFi的机器人应用设计技术解决方案

基于WiFi的机器人应用设计技术解决方案马虹【摘要】结合工业机器人的研究进展,以组太网为基础,突出上位机的作用,着重分析了基于WiFi的机器人的利用方法和界定,进行了WiFi接口设计及机器人终端控制研究,探讨了网络模式下多机器人系统的研究方法和关键技术.【期刊名称】《南京工业职业技术学院学报》【年(卷),期】2013(013)004【总页数】3页(P22-24)【关键词】机器人;WIFI;解决方案【作者】马虹【作者单位】南京工业职业技术学院能源与电气工程学院,江苏南京210023【正文语种】中文【中图分类】TN925目前在机器人的研究和应用领域,世界各国都已经取得显著进展。
在这方面较为领先的日本最近向全球展示的ASIMO机器人引起了世人的关注。
然而,机器人的应用还有很多关键技术未能突破,即使有较好的解决方案,也会被困于硬件设备的资源或能力不足(典型的是计算能力不足)。
而云计算概念的提出似乎给机器人研究找到了新的突破口。
卡内基梅隆大学的James Kuffner教授在Humanoid 2010大会上说,云计算机器人将会彻底改变机器人发展的进程,极大地促进软件系统的完善,因为研究人员不必再受制于硬件资源的局限,特别是机器人的中央控制系统,可以想到的是,可能机器人的软件系统会先于硬件系统而完善[1]。
本文研究的主要目的是设计和实现一个基于WiFi无线网络的智能识别机器人。
首先总结了大量国内外与智能机器人相关的文献资料,深入地分析了当前智能机器人发展现状,总结出在该领域存在的问题、机遇和挑战,提出了一种基于WiFi的解决方案。
本方案由机器人、支持WiFi的无线路由器组成。
硬件机器人只负责机械运动、数据采集、信息传输等功能,而需要进行复杂数据计算的功能则在PC端执行。
机器人与PC之间的通信通过WiFi无线网络连接。
1 机器人的关键技术计算机等学科的发展推动了机器人技术的迅速进步,智能识别机器人市场潜力巨大,使得与其相关的技术成为学术研究的热点问题。
看我们的WIFI-Robot无线远程遥控智能机器人

看我们的WIFI-Robot无线远程遥控智能机器人
使用普通的DB120无线路由器和爱果联盟论坛出的WIFI-Robot的专用驱动板做的国内最强悍WIFI智能车,既是高级玩具,也是很好的学习教材,现推荐给大家!
1、从爱果联盟论坛下载小车专用WIFI-Robot 2.0固件,并按教程刷好路由就可以了,专用固件和电脑控制工具下载地址
/thread.php?fid=63。
2、驱动板连接路由器并打开路由和驱动板电源,电脑WIFI设置DHCP自动获得WIFI-Robot 无线信号,用WIFI-Robot 专用PC控制工具连接视频和控制端口,WIFI-Robot Car无线智能远程遥控小车就能进行控制和视频传输了,而且爱果联盟开发组正在为ipad、iphone、Android手机和平板等终端设备开发配套的控制客户端。
控制软件界面
用的爱果联盟的WIFI-Robot驱动板
这是我的WIFI-Robot Car第二版实物照片
这是其坛友WIFI-Robot Car第二版实物照片。
基于wifi技术的智能家庭机器人的设计与实现
摘要基于WiFi技术的家庭智能机器人由电机、车体、STC89C52RC单片机最小系统、无线收发模块、电机驱动模块、LED灯和辅助其他成分。
基本原理将WIFI收发模块与上位机连接,通过上位机接收并显示视频信号,实现视频的实时传输,与此同时上位机可以发送指令给wifi收发模块。
WIFI模块通过串口通过指令,单片机读取串口命令和执行,就可以控制智能机器人的操作和LED的亮出来,从而实现上位机通过无线控制下位机的操作,实现智能化和无线遥控等功能。
关键词:WIFI,家庭,机器人,视频,智能化AbstractBased on WiFi technology, home intelligent robot by a motor vehicle body, STC89C52RC smallest single-chip system, wireless transceiver module, motor drive module, LED lights and other auxiliary components. The basic principle will WIFI transceiver module is connected with the host computer to receive and display video signals through the PC, to achieve real-time video transmission, while the host computer can send commands to a wifi transceiver module. WIFI module instruction, the microcontroller through the serial port to read and execute commands, you can control the operation of intelligent robots and LED's light out, enabling the host computer via a wireless control bit machine operation, intelligent wireless remote control and other functions.Key word:WIFI,Fimaly,Robots,Video,Intelligent目录摘要 (I)Abstract (II)1 绪论 (1)1.1 选题的背景和意义 (1)1.2 系统设计主要任务 (1)2 方案的论证与选择 (I)2.1 总体设计方案 (I)2.1.1 整机系统 (I)2.1.2 整机工作原理 (I)2.2 系统方案的选择与比较 (II)3 硬件电路设计 (III)3.1 无线路由器 (III)3.1.1 刷机固件介绍 (III)3.1.2 刷机步骤 ..................................................................................................... I V3.2 单片机最小系统设计 (V)3.2.1 STC89C52RC主控芯片 (V)3.2.2 单片机最小系统 ......................................................................................... V I3.2.3 STC89C52R单片机的使用 .................................................................... V II3.3 电机驱动电路 (VII)3.3.1 LM298N电机驱动芯片的产品参数 (VIII)3.3.2 驱动的原理及电路图 (VIII)3.4 摄像头介绍 ........................................................................................................... I X3.4.1 摄像头简介 ............................................................................................... I X3.4.2 摄像头的工作原理 (X)3.4.3 摄像头的主要构造 (X)4 系统程序设计............................................................................................. X I4.1 系统程序简介 ....................................................................................................... X I4.2 程序流程图 ........................................................................................................... X I4.2.1 主程序流程图 ........................................................................................... X I4.2.2 串口中断子函数 ...................................................................................... X II4.2.3 定时器中断子函数 (XIII)5 程序编写 (XV)5.1 软件介绍 (XV)5.2 程序编写 (XV)5.3 实物调试 (18)结论 (21)致谢 (22)附录 (23)参考文献 (25)1 绪论1.1 选题的背景和意义当您忘记关闭灯熄灭或空调等电器,打开软件关掉在家里的所有的电器。
新手入门之 Wifi Robot无线远程智能遥控小车
新手入门之Wifi Robot无线远程智能遥控小车您正在看的文章来自爱果联盟,原文地址:/read.php?tid=222 一:什么是Wifi Robot无线远程智能遥控小车?Wifi Robot无线远程智能遥控小车就是利用非常成熟的WIFI无线网络为数据载体,实现控制数据,音视频双向数据交换而达到控制小车和视频监控等等功能。
二:Wifi Robot无线远程智能遥控小车有什么功能?Wifi Robot无线远程智能遥控小车是集无线通讯、实时四驱、多向机械云台、视频监控、电器红外遥控、环境温度检测、为一体的多功能智能遥控车。
使用使用ATMEGA16L单片机作为数据处理中心,将电脑、手机端的控制数据经过路由器/btplug转换转换成串口数据,ATMEGA16L再将路由器发送来的串口数据进行分配来控制4个车轮的工作状态模式和三个陀机的工作角度A TMEGA16L还负责实时监控环境温度并经过路由器/btplug反馈至电脑,让使用者可以实时了解小车所在地的气温便于在到达目的地之前设定好空调温度等应用。
三:Wifi Robot无线远程智能遥控小车用在什么地方?怎么玩?Wifi Robot无线远程智能遥控小车可以放在公司作为产品演示的高级智能助手,帮你递送文件,帮你拿听百威,帮你拿盒万宝路,又或者向你的客户打声招呼。
Wifi Robot无线远程智能遥控小车可以放在家里当做一贴切保姆,你可以在公司用电脑监控家里的的一切动态,可以在车上就设定好家里空调温度,可以定时电视机在什么时候换什么台,这一切你只需要连接到ITELNET。
Wifi Robot无线远程智能遥控小车也是广场上的明星,你带着他在城市广场上炫耀,玩耍,让它拿个小礼物送心仪的MM,让他帮你丢垃圾,这一切都不是问题。
四:Wifi Robot无线远程智能遥控小车从哪里买得到?Wifi Robot无线远程智能遥控小车不会以成品方式出售,Wifi Robot无线远程智能遥控小车其实是我们全国各地广大爱好者组织开发的一款DIY车,我们只提供了驱动板部分路由器和车架这些都是大家团购再回来组装的,所有每个人DIY出来的车车可能都不一样,可谓风情万种。
DFROBOT套件原理图
ATmega168/328-Arduino Pin MappingNote that this chart is for the DIP-package chip. The Arduino Mini is based upon a smaller physical IC package that includes two extra ADC pins, which are not available in the DIP-package Arduino implementations.Arduino UNOArduino UNO可以通过3种方式供电,而且能自动选择供电方式▪外部直流电源通过电源插座供电▪电池连接电源连接器的GND和VIN引脚▪USB接口直接供电电源引脚说明:▪VIN --- 当外部直流电源接入电源插座时,可以通过VIN向外部供电;也可以通过此引脚向UNO 直接供电;VIN有电时将忽略从USB或者其他引脚接入的电源▪5V --- 通过稳压器或USB的5V电压,为UNO上的5V芯片供电▪ 3.3V --- 通过稳压器产生的3.3V电压,最大驱动电流50mA▪GND --- 地脚1.14路数字输入输出口:工作电压为5V,每一路能输出和接入最大电流为40mA。
每一路配置了20-50K欧姆内部上拉电阻(默认不连接)。
除此之外,有些引脚有特定的功能:▪串口信号RX(0号)、TX(1号): :与内部ATmega8U2 USB-to-TTL 芯片相连,提供TTL 电压水平的串口接收信号。
▪外部中断(2号和3号):触发中断引脚,可设成上升沿、下降沿或同时触发。
可以参看attachInterrupt()函数。
▪脉冲宽度调制PWM(3、5、6、9、10 、11):提供6路8位PWM输出,通过analogWrite()函数实现。
▪SPI(10(SS),11(MOSI),12(MISO),13(SCK)):这些引脚支持SPI通信接口,可以使用SPI 库。
wifi机器人组装图文说明
WiFi遥控行走机器人装配图文说明产品说明单片机行走机器人套件是用于教学实训开发的套件,通过单片机运行特定的程序控制机器人的前进和后退。
并添加了WiFi模块实现遥控功能。
介绍电路板的装配安装电阻电路板上只有六个色环电阻,而且六个色环电阻阻值相同都为1K,只需将6个电阻焊接好,不用担心装错了阻值。
如下图。
3mm红色发光二极管,长脚为正极,短脚为负极。
这边接发光二极管正极(长脚),另一边接发光二极管负极(短脚)安装独石电容,不用区分正负极安装8P 的IC座时,注意方向,IC座上一端有个半圆缺口,这个缺口和电路板上U1处的缺口一致。
安装三极管,电路板上一共有三种型号的三极管,2个8550,3个9012,2个8550,结合元件清单确定各个三极管的安装位置,避免装错。
安装铝电解电容器,也是长脚为正,短脚为负极,在电路板空心半圆一边接电解电容正极,实心半圆一边接电解电容负极。
把双排针插座装到电路板上。
贴片集成电路AMS1117-3.3V的安装位置在电路板背面,这里有根飞线,用剪下来的电阻剪脚连接给BT位置处焊接2P排针,这个排针用来方便连接外部电源供电。
如用电池供电则不会用到。
把单片机和WiFi模块安装到电路板把组装好的电路板装配到行走机器人上把机器人后面的电池盖取下来,用十字改锥取下紧固机器人的三个螺丝(下图红圈处位置)。
拆开机器人拆开后的行走机器人用烙铁把焊接在电机接线柱上的4根导线取下来。
电机接线柱上还并联的一个104的瓷片电容,这个瓷片电容不要动。
导线是用热熔胶固定在电机减速器壳上,用烙铁把这些热熔胶熔化后,再取下导线。
取下来的四根线中,机器人头部两根线接到电路板上的J1位置处,红线接‘+’,另一根线接‘-’。
电池盖上的两根线接在电路板BT位置处,红线接‘+’,另一根线接‘-’。
电机接线柱上再另外用两根线延长出来,接到电路板上MG位置处,电机的两根线可以先不管正负极,在后面再详细说明。
头部两根线太短,需要用导线延长。