3-3二阶系统的时域分析
二阶系统的时域分析二阶系统的数学模型

t
n
1
n2 e 1 2
entsinnt
sidnt
dtn101
2
2
e n t
cos d t
h' (t)
1
2n2 edstipnntsindntpd(tn
0 n
01,
1,2e2,nt
si)n
d
t
二阶系统的时域分析
欠阻尼二阶系统阶跃响应的性能指标
2.峰值时间tp tp为输出响应达到第一个峰值所对应的时间所
过阻尼二阶系统调节时间特性
二阶系统的时域分析
临界阻尼二阶系统的暂态响应
当ζ=1时,临界阻尼二阶系统T1=T2,
1 T1
1 T2
n
则临界阻尼二阶系统的单位阶跃响应为
c(s)
s
n2
n 2
1 s
1 s
s
n
n 2
s
1 n
h(t ) 1 (1 nt )ent 过阻尼二阶系统的响应较缓慢,实际应用 的控制系统一般不采用过阻尼系统。
结论
无阻尼系统属于临界稳定系统,不属于稳定 系统
临界阻尼和过阻尼系统虽无超调量,但反应 迟钝
欠阻尼系统虽有超调量,但反应迅速
因此控制系统就是性能指标之间的均衡,一 般设计成欠阻尼系统。
阻尼比一般取0.4~0.8,此时系统反应迅速, 而且超调量也不大
二阶系统的时域分析
阻尼比ζ是二阶系统的一个重要参量,由值ζ的大小 可以间接判断一个二阶系统的暂态品质。在过阻尼 (ζ>1)情况下,暂态特性为单调变化曲线,没有 超调和振荡,但调节时间较长,系统反应迟缓。当 ζ≤0 ,输出量作等幅振荡或发散振荡,系统不能稳 定工作。
不易求出ts,但 可得出ωnts与 ζ的关系曲线
32-3 二阶系统时域响应
《自动控制理论》
§3.3 3.3 §3.3.1 3.3
二阶系统的时间响应及动态性能
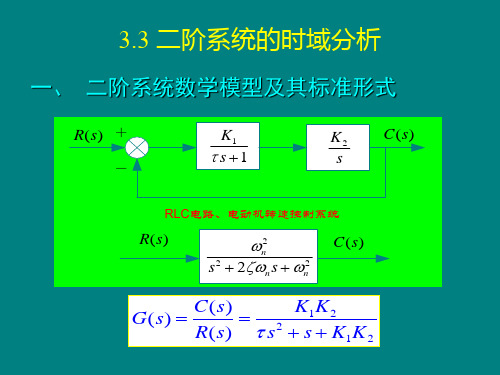
传递函数标准形式及分类
2 D(s) = s 2 + 2ξωn s + ωn = 0
《自动控制理论》
二阶系统的时域响应
R-L-C电路,其传递函数为: 电路,其传递函数为:
Uc( s) 1 G( s) = = Ur( s) LCs2 + RCs +1
s1, 2 = ± jωn
对应的单位阶跃响应为
c(t ) = 1 − cos ωnt
由此表明系统在无阻尼时,其瞬态响应呈等幅振荡,振荡 由此表明系统在无阻尼时,其瞬态响应呈等幅振荡, 频率为 wn 。 wn
《自动控制理论》
二阶系统的时域响应
(2)临界阻尼 (ξ = 1)
ξ =1时 系统具有两个相等的实根, 当ξ =1时,系统具有两个相等的实根,即 s1, 2 = −ωn 。此时 系统输出的拉氏变换为
《自动控制理论》
§3.3.4 二阶系统阶的动态校正
比例微分(PD)校正 例1. 比例微分 校正
校正前图3-7b所示系统的特征方程为: 所示系统的特征方程为: 校正前图 所示系统的特征方程为
Js 2 + fs + K = 0
对应的
ωn =
K F , ξ= J 2 KJ
(3 - 33)
图3-15 具有PD校正的二阶系统 具有 校正的二阶系统
π −β ωd
(3-18) 18) (3-19) 19)
ξπ
1−ξ 2
π ωd
c(tp) − c(∞) − (3)超调量 Mp = = c(tp) −1 = e c(∞) 1 1 1 ts = (ln + ln ) (4)调整时间 2 ∆ ξ ωd 1− ξ
第3讲 二阶系统的时域分析
18
三、典型二阶系统的动态过程分析
(一)衰减振荡瞬态过程 (0 1):欠阻尼
s 1, 2 ζω n jωn 1 ζ
2
ζω n jωd
c (t ) 1 Fra biblioteke ζωn t 1 ζ 2
sin(ωd t β ) ,
t 0
⒈ 上升时间 t r :根据定义,当 t t r时,c(tr ) 1 。
3
s1, 2 n n 1
2
⒊ 当 1 时,特征方程有一对相等的实根,两个极点位于S平 面负实轴上,系统时间响应无振荡,称为临界阻尼系统,系统 的阶跃响应为非振荡过程。 ⒋ 当 1 时,特征方程有一对不等的实根,两个极点位于S 平面负实轴上,系统时间响应无振荡,称为过阻尼系统,系统 的阶跃响应为非振荡过程。 以上 1 属于非振荡情况
于是有:
tr d
ωd ωn 1 ζ 2
n
n
j n 1 2 j d
n
称为阻尼角
j n 1 2
cos
可见,当阻尼比一定时,系统的响应速度与自然频率成正比; 而当阻尼振荡频率一定时,阻尼比越小,上升时间越短。
2 n 1 C ( s) ( s) R( s) 2 2 s 2 n s n s
2 其中, 由特征方程 s 2 2 n s n 0
可求得两个特征根(即闭环极点)
s1, 2 n n 2 1
6
[分析]:
s1, 2 n n 1
s n n 1 2 2 2 2 s s 2 n s n s 2 n s n
单位阶跃响应临界阻尼=1
2
100%
20 10 0 0.2 0.4 0.6 0.8 1.0
§3-3 二阶系统的时域分析
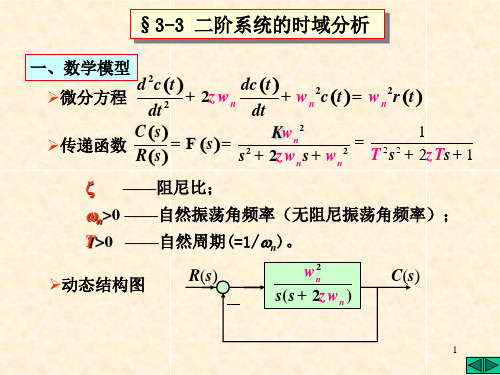
一、数学模型 微分方程
d 2c (t ) dt 2
C (s)
+ 2z w n
dc (t ) dt
+ w n 2c (t ) = w n 2 r (t )
1 Kw n2 = 2 2 = F (s) = 2 传递函数 2 T s + 2z Ts + 1 R (s) s + 2z w n s + w n
1 s 2 1 s 2 s ( s jd )( s jd ) s ( s )2 d 2
d 1 s 2 2 2 2 s ( s ) d ( s ) d d
h( t ) 1 e (cos d t sin d t ) d t h( t ) 1 e (cos d t sin d t ) 2 1 - zw t
j
w d = w n 1- z 2 ——阻尼振荡角频
率 h(t ) = 1- e- z w t (cos wd t +
n
z 1- z
2
sin wd t )
×
s1
w d = w n 1- z 2
n
= 1= 1-
e-
z wnt
1- z 2 e- z w n t
1- z
2
( 1- z 2 cos w d t + z sin w d t )
j
0<<1
0
jjຫໍສະໝຸດ 欠阻尼=10临界阻尼
>1
0
过阻尼
3.3二阶系统
tp d 1 2 n
(6)最大超调量的计算:
p
c(t p ) c() c ( )
n t p
100%
1 2
2
e
e
(cos d t p
sin d t p ) 100%
n t p
(cos
1
sin ) 100%
dc(t ) / dt 0
则
故
n e
nt p
sin(d t p ) d e
tan(d t p )
nt p
cos(d t p ) 0
2
1
tan
到达第一个峰值时应有
d t p 0, , 2 ,3
d t p
s1 , s2 jn 是一对共轭纯虚数根。
三、二阶系统的单位阶跃响应
对于单位阶跃输入
r (t ) 1(t )
1 R( s) s
于是
2 n 1 C ( s) 2 2 s 2n s n s
由拉氏反变换可以得到二阶系统的单位阶跃响应为
c(t ) L1[C ( s)] 下面按阻尼比分别讨论。
欠阻尼系统单位阶跃响应为
c(t ) 1 e nt cos d t
n t e sin d t d
n
1 e nt (cos d t
1
2
sin d t )
(t 0)
或写为
c(t ) 1 e nt 1
2
( 1
解得 t 1/ n 。 整个暂态过程中,临界阻尼系统阶跃响应都是单调 增长的没有超调。如以达到稳态值的 95% 所经历的时 间做为调整时间,则
二阶系统的时域分析
实验报告册学年学期课程名称:学院:专业:班级:学号:学生姓名:河南工学院实验报告实验项目二阶系统的时域分析实验日期班级姓名指导教师综合成绩一、预习内容1)实验目的和要求1.验证二阶系统的特征参数阻尼比ζ和无阻尼自然频率ωn对系统动态性能的影响2.定量分析ζ和ωn与最大超调量σ%和调节时间ts之间的关系。
3.学习用MATLAB仿真软件对实验内容中的电路进行仿真。
2)实验内容和原理3)实验所用主要仪器设备(或实验环境)计算机MATLAB7.0二、实验数据(现象)记录及结果处理三、实验结果分析与讨论(对实验结果进行具体分析,并对实验中出现的问题或错误原因分析,以及改进的办法与建议)1. 阻尼比越小,超调量越大,上升时间越短。
2. Ωn 越大,响应速度越快。
3. 在过阻尼的状态下,由图像可知其阶跃响应实际上是两个一阶系统响应的叠加。
随着ζ的不断增加,一一个极点不断靠近原点,另一个不断远离。
4. 当两个极点相距较近时,对阶跃响应产生的影响都不能忽略。
ζ的增大使不断远离原点的极点所产生的影响越来越小,最后趋近于零。
教师评阅意见(1)实验预习 (30分)成绩:□预习认真、熟练掌握方法与步骤(30~28) □有预习、基本掌握方法与步骤(27~22)□有预习、但未能掌握方法与步骤(21~18) □没有预习,不能完成实验(17~0)(2)操作过程 (40分)成绩:□遵规守纪、操作熟练、团结协作 (40~37) □遵规守纪、操作正确、有协作 (36~29) □遵规守纪、操作基本正确、无协作 (28~24) □不能遵规守纪、操作不正确、无协作(17~0)(3)结果分析 (30分)成绩:□结果详实、结论清晰、讨论合理(30~28) □结果正确、讨论适当(27~22)□结果正确、没有分析讨论(21~18) □结果不正确、没有分析讨论(17~0)其它意见:教师签名:年月日。
第三章 控制系统的时域分析—2二阶系统时域分析
2 n
1
s
L1
A0 s
s
A1 s1
s
A2 s2
s2 s1
其 中A0 s C(s) s0 1A1 , A2自 己 求
8
c t
1
A1e s1t
A2e s2t
1
s2
1 s1
s1e s2t s2e s1t
❖单调过程,无超调, 大,内耗大,无法维持能量交换,即
二阶系统的时域响应
快
稳
准
动态性能分析 tr,td,tp,ts,s%
稳定性分析 稳态性能分析
Routh判据
ess
二阶系统的基本性质及结论
2
3-3 二阶系统的时域分析
二阶系统:以二阶微分方程作为运动方程的控制系统。 1 二阶系统的数学模型
一伺服系统,系统框图如下:
R(s) E(s)
K
C(s)
- sTms 1
振荡角频率”
10
(s)
s2
1 2 01s
1
2
1.8
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
2
4
6
8 10 12 14 16 18 20
11
❖临界阻尼下单位阶跃响应 1 1
r(t) 1(t) , R(s) 1 s
s1 s2 n
s1 s2
C(s) n2 1 1 n 1
K Tm
n-自然频率(或无阻尼振荡频率)
2
n
1 Tm
1
2 Tm K
-阻尼比(相对阻尼系数)
二阶系统的闭环特征方程为:
s2 2ns n2 0
自动控制原理3.3~3.4 二阶系统时域分析
闭环特征方程: D( s ) s 2 2 s 2 0 n n 闭环特征根: s1, 2 n n
2
1
二、二阶系统单位阶跃响应
单位阶跃输入r(t)=1(t)时,其二阶系统的输出的拉氏变换为
2 2 n n 1 C ( s ) ( s ) R( s ) 2 2 s 2 n s n s s( s s1 )(s s2 )
e
(ζ ζ 2 1 ) n t
ζ 2 1 ) n t
c(t ) 1
1
2 ζ 2 1 (ζ ζ 2 1) 1 (ζ e 2 ζ 2 1 (ζ ζ 2 1)
e
(ζ ζ 2 1 ) n t
ζ 2 1 ) n t
c(t)
1
0 t
单调上升过程
2.0 1.8 1.6 1.4 1.2 c(t) 1.0 0.8 0.6 0.4 0.2 0
=0
0.4 0.5 0.6 0.7 0.8
0.1 0.2 0.3
1.0 2.0
1
2
3
4
5
• 在0<<1, 越小,超调量越大,平稳性越差,调节时间ts长; • =0.7,调节时间短,而超调量%<5%,平稳性也好,故称 ζ=0.7为最佳阻尼比。工程希望=0.4~0.8为宜; •在≥1 , 越大,系统响应速度慢,调节时间ts也长。
例题:设角度随动系统如图所示,T=0.1为伺服电机时间常数, 若要求系统的单位阶跃响应无超调,且调节时间ts≤1s,问K应 取多大?此时上升时间等于多少?
Θi(s)
_
K s(Ts 1)
Θo(s)
解:闭环传递函数为
K K K /T s (Ts 1) (s) 2 2 K Ts s K s s / T K / T 1 s (Ts 1)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二阶系统的闭环极点分布
j
特征根: s1, 2 n n 2 1
j
n 1 2
j
n
n 1 2
n
0
n 1 2
0
1
0
n 1 2
0 1
1 0
j
s1 s 2 n 0
1
1
C1 C2 C3 L C1e S t C2 e S t C3 ( s s1 ) ( s s2 ) s
1
1 2
其中
C1
n2
( s1 s2 ) s1
; C2
n2
( s1 s2 ) s2
; C3 1
而s1,s2是ζ和ωn的函数,显然c(t)只与ζ ,ωn有关,即ζ ,ωn决
第三章 时域分析法
第三节 二阶系统时域分析
第三节 二阶系统的时域分析
项目
教学目的
内容
掌握二阶系统的数学模型和时域响应的特点。 能够计算欠阻尼时域性能指标。
欠阻尼时域性能指标的计算。阻尼系数和自 然频率对系输出的影响。
教学重点
教学难点 阻尼 系数 和自然频率 对系统输出 的影响 。 及 其 处 理 MATLAB作图、对比、总结。
①
环节;
比例+微分(引入零点):在前向通路中串一个PD控制
② 采用测速反馈控制。 3) PD控制与测速反馈控制两种方案比较 (见下页附表)
附表: PD控制与测速反馈控制两种方案比较
性能指标
PD控制
方
案
测速反馈控制 增 大 降 低
阻尼比 自然频率 开环增益 稳态误差 超调量 性能 适用场合
不 影 响 不影响
sin( 1 2 nt arccos )
td
1 0.7
tr (令c(t ) 1) d tp (令c(t ) 0) d
r
σ
0
令 c(t r ) 1
r
峰值时间 tp :指响应从0到达第一次峰值(最大值)时 所 需要的时 间; 由求c (t)极值的方法,即由 c’(t)=0 求得:
tp d n 1 2
调节时间 ts :即过渡过程时间。指响应到达并保持在终值±5%
(△=0.05)或±2%(△=0.02)内所需要的最短时间。 具体求法参见教材P82。 在工程上,一般采用下列公式进行估算: 当ζ ≥0.7时: 当0< ζ <0.7时:
(阻尼振荡频率)
ωd 即s1,s2的虚部。亦即闭环极点到实轴的距离; ωn(自然振荡频率): 闭环极点到原点的距离; ζ = cosβ(β为阻尼角):ωn 与负实轴夹角的余弦; σ、ωd、ωn、及ζ 、β的关系图示如下:
j
S1 β
6) 性能指标分析
上升时间 tr :指响应从0到第一次达到终 值(稳态值)时所需要的时间;
实际设计中,一般取ζ = 0.4~0.8。其中以ζ = 0.7时为 最佳阻尼。
三. 欠阻尼情况下,二阶系统的单位脉冲、 斜坡及加速度响应的动态性能分析不要求。 四. 其他几种阻尼情况下,各种典型信号响 应的动态性能分析不要求。
六.二阶系统性能的改善
1) 改善的目的:获得满意的动态性能与稳态性能,更好的控 制效果。 2) 改善的办法:(P88~92)
:阻尼系数
n :自然频率(无阻尼振荡频率)
• 开环传函模拟电路
比例 环节
R2 R1 R1 + R3 + + R4
2 n G( s) s( s 2n )
积分 环节
C1
R5 C2
惯性 环节
R(s)
+
+ +
C(s)
举例
(s) 2 2 s 2n s n
2 n
两级滤波电路网络的传递函数 1 ( s ) R1C1R2C2 s 2 ( R1C1 R2C2 R1C2 )s 1 机械力学系统的传递函数
不影响
影响程度不同(大)
影 响
(小)
都能改善,但改善程度不同
由 于 其 放 大 作 用 , 在 对噪声有滤波作用, 输 入 端 存 在 严 重 噪 声 使用广泛 时,不宜采用
小结:二阶系统中 和n 的作用
1) 0时,系统输出不稳定。
决定了超调量 n 决定了系统的响应速度。 的大小和响应的速度,
定着c(t)的形式。分别讨论如下:
① ζ >1时,(过阻尼) s1 ,s2 为一对不等的负实数根。
j
s1、s2
j
0 0 t
② ζ = 1时,(临界阻尼) s1 ,s2 为一对相等的负实数根。
③ 0< ζ <1时,(欠阻尼) s1 ,s2 为一对具有负实部的共轭复根。
④ 当ζ =0时,(无阻尼,零阻尼) s1 ,s2 为一对幅值相等的虚根。
tp d n 1 2
代入后简化得:
e
结论分析:
1 2
100%
a) tr 、tp 、ts 、td 与ωn 的关系(反比关系); b) tp 、td与ζ的关系(正比关系);ts与ζ的关系(反比关系).
c) 、 σ与ζ的关系(反比关系); ζ小时,系统的平 稳性差;ζ大时,系统的平稳性好。
3) t → ∞时, e(∞)=0 则c(∞)=1;
4) σ ≠0, N≠0 即存在超调和振荡; 5) 令 n
(衰减系数)
2 n σ即 1 (阻尼振荡频率 ) s , s 令1 (衰减系数) d 2的实部。亦即闭环极点到虚轴的距离; n
n 1 2 d
1 R( s) s
则二阶系统在时的单位阶跃响应式为:
s a at at L L [[ ] ] e e sin cos tt 22 22 (( ss a a ))
11
2 n 1 C ( s) ( s) R( s) 2 2 s s 2 n s n 2 n 2 2 1 2 n (1 2 ) 1 2 2 2 n s ( s n ) n (1 ) (s ) 2 2 (1 2 ) s
d 2c(t ) dc(t ) 2 2 2 c ( t ) n n n r (t ) 2 dt dt
2 n G( s ) (s) 2 2 1 G(s) s 2n s n
标准 形式
结构图
R( s )
-
2 C (s) n s( s 2 n )
1. 二阶系统的闭环极点 由闭环特征式: D ( s ) s 2 2 n s n2 得: 系统的闭环特征方程 D ( s ) s 2 2 n s n2 0
有:
2 s1、 1 2 n n
(S1 ,S2二阶系统的闭环极点)
对应于ζ 的不同取值,可以得到 s1 , s2 在[s]平面上不同的分布。 二阶系统的时间响应取决于 和n 两个参数,其中阻尼系数 决定 n 决定了系统的响应速度。可以根据 了系统的阻尼程度, n 的变化情 和 况来研究二阶系统的时间响应。
• 定义:以二阶微分方程作为运动方程的控 制系统,称为二阶系统。 • 重要性:二阶系统是最常见的一种系统, 很多高阶系统可简化为二阶系统,在控制 理论中更具有代表性;它的动态性能指标 和系统参数之间的关系非常简明,分析和 设计比较容易。
一、二阶系统的数学模型
微分方程:
闭环传函: 开环传函
2 n G( s) ( s s 2n)
T LC
-----二阶系统时间常数 / 秒
R C -----二阶系统阻尼比或相对阻尼系数 / (无量纲) 2 L
一般式拉氏变换
1 ( S ) 2 2 T s 2Ts 1
二阶系统标准式
n2 ( s ) 2 s 2 n s n2
二.二阶系统的闭环极点与单位阶跃响应
1 ( s ) 2 ms fs k
比如:RLC振荡电路的微分模型为
d 2uC (t ) duC (t ) LC RC uC (t ) ur (t ) 2 dt dt
一般化 其中
2 d uC (t ) duC (t ) 2 T 2T uC (t ) ur (t ) 2 dt dt
n n
令 n (衰减系数) 令n (衰减系数)
2 n 1 n 1 ) d2 d (阻尼振荡频率 (阻尼振荡频率 )
则 s1、 jd 2
此时
1 s C ( s) 2 2 s ( s ) d ( s ) 2 d2
所以 1
其中 cosβ = ζ 即β=arc cos ζ (β 称为阻尼角)
t t (t ) 1 e cos tt e sin d t d c(t )所以 1 e c cosd t e sin t d d dcos cos sin sin( ) sin t t e e 1 d t sin 2 sin t d 1 1 2
t
分析:
e t 1) 因为误差 e(t ) r (t ) c(t ) 1 2
由此可见,它为一振荡衰减过程(指数衰减),振荡频率 为ωd 。图示如下:
e(t)
1 1
sin d t
c(t)
0
t
0
t
2) e(t) 及c(t)的衰减速度取决于ζ ωn的大小;
2) 0 1时,系统输出有超调,且
越大,超调量越小,响应速度越慢;