一阶系统的时域分析
一阶系统时域分析
能达到稳态值的0.632, 经过3T或4T的时间系统输出响应分加别
达到稳态值的0.95或0.98。
线性系统的时域分析法>>一阶系统的时域分析
一阶系统响应的特点: (1) t=T时,输出达到稳态值的0.632
h(0) 1 e0 0 ——— t= 0时, 输出为0 h(T ) 1 e1 0.632 —— t=∞时,输出达到稳态值1 h(3T ) 1 e3 0.95 —— t=T时,输出达到稳态值的0.632 h(4T ) 1 e4 0.98 —— t=3T时,输出达到稳态值的0.95
典型系统的时域分析
1.一阶系统时域分析
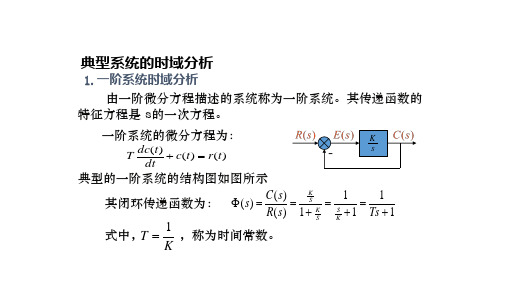
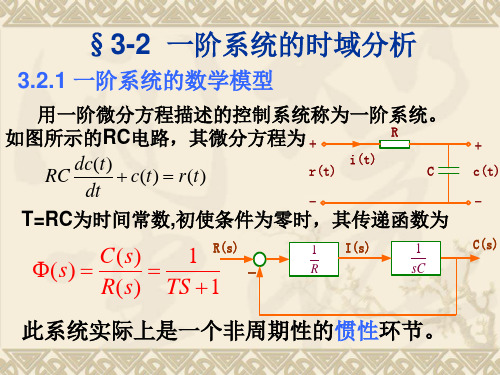
由一阶微分方程描述的系统称为一阶系统。其传递函数的 特征方程是 s的一次方程。
一阶系统的微分方程为:
T dc(t) c(t) r(t) dt
典型的一阶系统的结构图如图所示
K
-
s
其闭环传递函数为:
(s) C(s)
K S
1
1
R(s)
1
K S
S K
1
Ts 1
式中,T 1 ,称为时间常数。
K
线性系统的时域分析法>>一阶系统的时域分析
1.一阶系统的单位阶跃响应
r(t) 1(t), R(s) 1 s
11
C(s)
,
Ts 1 s
h(t) L1[ 1 1]
Ts 1 s
L1[1
1
t
] 1 e T
s s 1
T
这是一条指数曲线, t 0
处斜率最大,其值为1/T,若系统保
持此变化速度,在 t=T 时,输出将达到稳态值。而实际系统只
t
c(td ) 1 e T 0.5
自动控制原理--一阶系统的时域分析相关知识
三、 一阶系统的单位脉冲响应
输入信号 r(t) (t) R(s)=1
c(t)
输出信号 C(s) (s)R(s) 1
1/T
Ts 1
斜率-1/T2
0.368/T 0.135/T
c(t) 1 et /T T
拉氏反变换,得 t k(t) L1[C(s)] L1[ (s)]
0 T 2T 3T 图3.10 一阶系统的单位脉冲响应
• 例3-1:
一阶系统如图所示,试求系统单位阶跃响应的调 节时间ts,如果要求ts=0.1秒,试问系统的反馈 系数应如何调整?
• 例3-2:
G(s) 10
已知某元部件的传递函数为:
0.2s 1
采用图示方法引入负反馈,将调节时间减至原来 的0.1倍,但总放大系数保持不变,试选择KH、 K0的值。
1 et /T (t 0) T
三、 一阶系统的单位脉冲响应特点
• 1)可以用时间常数去度量系统的输出量数字。 • 2)初始斜率为-1/T2 。 • 3) 无超调,稳态误差为零 。
h(t)
超调量
1.0 0.9
延迟时
0.5 间
0.1 0
峰值时间
上升时间 调节时间
误差带 0.02或0.05
稳态误差 (t→∞)
s
输出 C (s) (s) R(s)
1 1 Ts 1 s
1 1 取拉氏反变换,得 s Ts 1
h(t) 1 et /T (t 0)
一阶系统单位阶跃响应是终值为1的单调上升过程。
c(t) c(t) 1 et /T dh(t) 1
1
dt t0 T
0.865
0.632
td 0.69T
一阶反馈系统
假设将一阶系统作为反馈控制系统的对象, 放大器增益可调,系统结构图如图所示。
32一阶系统的时域分析
k(0)=
1 T
h’(0)=1/T
K’(0)=
1
Th2(TT)=0.632h(∞)
h(2T)=0.865h(∞)
响应应
h(3T)=0.95h(∞)
问应
1 、3个图各如何求T? h(42T、)=调0.节98时2h间(∞ts=)?
3 、r(t)=vt时,?ess=?
4、求导关系
小结: t d 1(t) d 2 t 1t
什么是二阶系统?凡以二阶微分方程作为运动方 程的控制系统,即为二阶系统。 研究二阶系统的意义:
1. 二阶系统的典型应用极为普遍 2. 不少高阶系统的特性在一定条件下可用二阶系 统特性来表征。
本节主要内容: 一、继续讲二阶系统的时域分析中的几种工作状态。 二、二阶系统的性能改善,关键是改变了阻尼比和
ch(t()t=)1=-1e-e-t/T
63.2% 86.5% 95% 98.2% 99.3%
t
0
T
2T 3T 4T 5T
稳态性能指标:
图 3-4指 数 响 应 曲 线
一阶惯性系统的单位阶跃响没有静态误差
ess
lim r (t )
t
h(t)
1
h()
11
0
讨论:动态指标与时间常数T有关,T越小,其响应过
dt
T dc(t) c(t) r(t)
(3-2)
dt
其中,T=RC为时间常数;取拉氏变换
TsC(s) C(s) R(s)
TsC(s) C(s) R(s)
则一阶系统的传递函数为:
i(t) R
(s) C(s) 1 R(s) Ts 1
(3-3)
r(t)
C c(t)
一阶系统时域分析
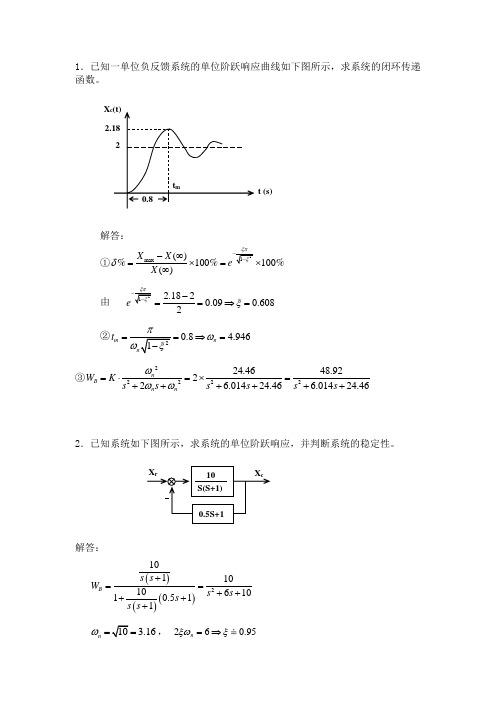
1.已知一单位负反馈系统的单位阶跃响应曲线如下图所示,求系统的闭环传递函数。
解答:①max ()100100()X X %%e %X δ-∞=⨯=⨯∞由2.1820.090.6082eξ-==⇒=②0.8 4.946m n t ω==⇒= ③2222224.4648.9222 6.01424.46 6.01424.46n B n n W K s s s s s s ωωω=⋅=⨯=++++++2.已知系统如下图所示,求系统的单位阶跃响应,并判断系统的稳定性。
解答:()()()2101101061010.511B s s W s s s s s +==+++++3.16n ω==, 260.95n ξωξ=⇒()()1sin n t c X t ξωωθ-=,arctg θ=()31 3.2sin 0.98718.19t e t -=-+︒ (5分)系统根为1,2632P j -±==-±,在左半平面,所以系统稳定。
3.一阶系统的结构如下图所示。
试求该系统单位阶跃响应的调节时间t s ;如果要求t s (5%)≤ 0.1(秒),试问系统的反馈系数应取何值?(1)首先由系统结构图写出闭环传递函数得 T =0.1(s )因此得调节时间 t s =3T =0.3(s),(取5%误差带)(2)求满足t s (5%) ≤0.1(s )的反馈系数值。
假设反馈系数K t (K t >0),那么同样可由结构图写出闭环传递函数由闭环传递函数可得 T = 0.01/K t100()10()100()0.1110.1c B r X s s W s X s s s ===++⨯1001/()1000.0111t B t tK s W s K s s K ==+⨯+根据题意要求 t s (5%) ≤ 0.1(s )则 t s = 3T = 0.03/K t ≤ 0.1(s)所以 K t ≥ 0.34.已知某装置的电路如题图所示。
自动控制原理一阶系统时域分析

R(s)
1 s3
C
(s)
(
s)
R(s)
(1 Ts
) 1
1 s3
A s3
B s2
C s
D s 1
1 s3
T s2
T2 s
T2 s 1
T
T
c(t)
1
t
2
Tt
T
2 (1
1t
eT
)
2
(t 0)
e(t
)r(t)c(t)TtT2
(1
1
eT
t
)
上式表明,跟踪误差随时间推移而增大,直至无限大。因此,一阶系统不 能实现对加速度输入函数的跟踪。
第26页/共27页
感谢您的观看!
第27页/共27页
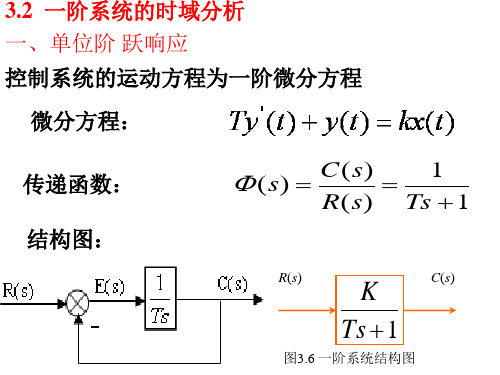
R(s) + E(s) 1 C(s)
-
Ts
R(s)
1
C(s)
Ts 1
(a)
微分方程: 闭环传递函数:
T dc(t) c(t) r(t) dt
(s) C(s) 1 R(s) Ts 1
(b) 标准形式
第18页/共27页
二、一阶系统单位阶跃响应
r(t) 1(t), R(s) 1 s
1
C(s)
1 Kh 100 / s 1 s / 100Kh
• 要求ts=0.1s,即3T=0.1s, 即
,得 1 0.1 100Kh 3
K h 0.3
• 解题关键:化闭环传递函数为标准形式。
第22页/共27页
二、一阶系统单位脉冲响应
r(t) (t) R(s) 1
C(s) (s)R(s) 1 1/T Ts 1 s 1/T
第15页/共27页
例题:加入给定值阶跃量为2.4,响应 曲线如图所示,求超调量。
一阶系统的时域响应实验报告

一阶系统的时域响应实验报告实验目的:通过实验观察一阶系统的时域响应情况,掌握一阶系统的传递函数及其参数对响应的影响。
实验器材:示波器、信号发生器、直流电源、一阶滤波器。
实验原理:一阶系统的传递函数为H(s)=K/(Ts+1),其中K为系统的增益,T为系统的时间常数。
系统的单位阶跃响应为h(t)=K(1-e^(-t/T))。
实验步骤:1、按照实验电路连接图连接电路。
2、将示波器接在电路输出端,用信号发生器产生一个频率为1kHz的正弦波作为输入信号,调节直流电源,使得输入信号幅值为1V。
3、测量电路输出波形,记录幅值、峰值、频率等数据。
4、将输入信号改为单位阶跃信号,在示波器上观察并记录输出信号的响应过程,测量电路的时间常数T。
实验结果及分析:1、在实验中,我们按照传统的RC低通滤波器的电路连接方式,将滤波器动态系统搭建起来。
2、对于一个RC电路,可以证明其传递函数为H(s)=1/(RCs+1)。
因此在实验中,我们可以通过改变RC电路的$RC$值来改变系统的时间常数,并观察其对系统响应的影响。
3、实验中我们观察到,当输入信号为正弦波时,系统能够对信号进行较好的滤波,输出信号幅值与频率的比例关系为a1=f^-1。
4、当输入信号为单位阶跃信号时,我们能够观察到系统的单位阶跃响应。
在实验中,我们通过观察输出信号的时间常数,可以得到系统的时间常数T。
5、实验中,我们还观察到了系统的过渡过程。
在输入信号发生变化后,系统的输出信号不会立即改变,而是经过一段时间才能够达到稳态。
在实验中,我们通过调节系统的时间常数来观察过渡过程的变化,从而获得了对一阶系统的更深刻的认识。
实验结论:通过本实验,我们详细地了解了一阶系统的时间常数、单位阶跃响应等数学概念,同时还深入掌握了一阶系统的响应机理。
此外,我们还利用实验数据验证了一阶系统的传递函数的正确性,并进一步掌握了如何通过调节时间常数来改变系统响应的技巧。
3-2 一阶系统的时域分析
一阶系统结构如图所示, 例: 一阶系统结构如图所示,试求该系统的单位 阶跃响应及调节时间。若要求t 阶跃响应及调节时间。若要求 s<0.1s,试问系 , 统的反馈系数K 应如何选取? 统的反馈系数 t应如何选取?
R(s)
-
100
C(s)
s
Κt
解:系统闭环传递函 数为: 数为:
C ( s) 100 Φ(s) = = R( s) s + 100 K t = 1 Kt 1 100 K t 1 Kt = Ts + 1 s +1
瞬态分量 稳态分量
瞬态分量变化规律由传递函数的极点s=-1/T决定 瞬态分量变化规律由传递函数的极点s=-1/T决定 极点s=
c(t ) = 1 − e
t − T
t≥0
c(t ) = 1 − e
−
t T
t≥0
由于c(t)的终值为1,系统稳态误差为0。 由于c(t)的终值为1,系统稳态误差为0 c(t)的终值为1,系统稳态误差为 动态性能指标: 动态性能指标:
输入信号 输入信号 时域) 复频域) (时域) (复频域) 输出响应 传递函数
δ (t )
1 ⋅ (t )
1
1 s 1 2 s 1 s3
1 e T
−
t T
t≥0
t T
1− e
ห้องสมุดไป่ตู้
−
t≥0
− t T
t
1 2 t 2
t − T + Te
t≥0
− t T
1 Ts + 1
1 2 t − Tt + T 2 (1 − e 2
R(s)
-
100
C(s)
s
一阶系统的时域分析

数T之间的关系。
时间t
0
T
2T 3T
…
输出量 0 0.632 0.865 0.950 … 1.0
斜率 1/T 0.368/T 0.135/T 0.050/T … 0.0
根据这一特点,可用实验的方法测定一阶系统的时间常 数,或测定系统是否属于一阶系统。
时间常数T是一阶系统的一个重要参数。 当t=3T时,响应输出可达稳态值的95%;
输出量和输入量之间的位置误差: t ess (t) 1(t) c(t) e T
稳态误差 :
t
lim
t
ess
(t
)
lim
t
e
T
0
三 一阶系统的单位斜坡响应
当一阶系统的输入信号为单位斜坡信号r(t)=t,其拉氏变 换为R(s)=1/s2,则系统的输出为:
C(s)
R(s) Ts 1
1 Ts 1
S tep R esponse 10
9
8
7
k 0.1
6
A m plitude
5
4
3
k 0.3
2
1
0
0
0.1
0.2
0.3
0.4
0.5
0.6
T im e (sec)
小结
• 一阶系统的传递函数和典型方块图 • 一阶系统的单位阶跃响应(单调上升曲线,性
能指标常用调整时间) • 系统对输入信号导数的响应等于对输入信号响
五.三种响应之间的关系
比较一阶系统对单位脉冲、单位阶跃和单位斜 坡输入信号的响应,就会发现它们的输入信号 有如下关系:
d (t) d [1(t)];
dt
1(t) d [t 1(t)]; dt
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3-2 一阶系统的时域分析
1、一阶系统的数学模型
如RC电路C(t)为输出电压, r(t)为输入电压,C(0)=0
i(t) r(t) R C c(t)
一阶系统:以一阶微分方程作为运动方程的控制系统。
列方程: Ri(t ) c(t ) r(t ) 图3-2 一阶控制系统 dc(t ) i(t ) C c(0) 0 dt dc(t ) (3-2) T c(t ) r(t ) dt
c (t) h (t)
(t)=1 ch (t)=1 -e-e-t/T
98.2%
63.2%
86.5%
99.3%
95%
0
T
2T
3T
4T
5T
t
图 3-4 指 数 响 应 曲 线
稳态性能指标: 一阶惯性系统的 ) h ( t ) 1 h ( ) 1 1 0 ss
单位阶跃响应h(t)为 :h(t)=1-e-t/T , t≥0
(3-4)
注意:R(s)的极点形成系统响应的稳态分量。传递函 数的极点是产生系统响应的瞬态分量。这一个结论不 仅适用于一阶线性定常系统,而且也适用于高阶线性 定常系统。
1
0.632
c (t) h (t)
(t)=1 ch (t)=1 -e-e-t/T
其中,T=RC为时间常数;取拉氏变换
TsC ( s ) C ( s ) R ( s )
TsC ( s ) C ( s ) R ( s )
则一阶系统的传递函数为:
C (s) 1 (s) R (s) Ts 1
(3-3)
i(t) r(t) R C c(t)
画方框图 : R( s) C( s) I ( s) R 1 I ( s) CsC( s) 或 C ( s) Cs
⑵一阶系统的响应曲线斜率 t=0时,
(t) t0 (1e h
t /T
1
0.632
ch (t) (t)
86.5%
(t)=1 ch (t)=1 -e-e-t/T
98.2%
t0
t=T时, t=∞时,
1 1 t /T T 4T ( ) e 2T 3T 0 T T t0 图 3-4 指 数 响 应 曲 线 1 1 t/ T h ( t ) ( ) e 0 . 368 t T T T t T
k(t)
当输入为单位脉冲函r(t)=δ(t), 求其脉冲响应。 因为R(s)=1,则系统的输出为:
1 1 K ( s ) R ( s ) ( s ) TS 1 TS 1
1
t d 0 . 5 1 e, 则 e 2 ; ln 2 ; t T 4T 2T 3T 5T T 0
d T d
63.2%
根据动态指标定义,求一阶系统的动态性能指标 (t)=1 ch (t)=1 -e-e-t/T c (t) h (t) a.求延迟时间 1 t d: 因为h(∞)=1 ,由td的定义,当t=td时,h(td)=0.5 0.632 代入一阶系统阶跃响应表达式, t t
98.2%
63.2%
86.5%
99.3%
95%
0
T
2T
3T
4T
5T
t
图 3-4 指 数 响 应 曲 线
一阶系统的单位阶跃响应为非周期响应,具备如下两个特点:
图3-3 一阶系统的单位阶跃响应曲线
⑴ 可以时间常数T度量系统输出量的数值。 当t=0,h(0)=0;当 t→∞ , h(∞)=1。 如:当t=T,h(T)=0.632; t=2T,h(2T)=0.865 t=3T,h(3T)=0.95
63.2%
)
99.3%
95%
5T
t
1 t/T h ( t )t ( ) e 0 T T t
一阶系统响应曲线在t=0时的斜率为1/T; 其斜率随时间下降,当t=∞时,动态过程结束, 但工程上习惯取t=(3-5)T,认为过渡过程结束。 ∴T反映了系统的响应速度。
t T ln 2 , 所以 t 0 . 69 : T d d 图 3-4 指 数 响 应 曲 线
一阶系统的时域 分析
3-2 一阶系统的时域分析
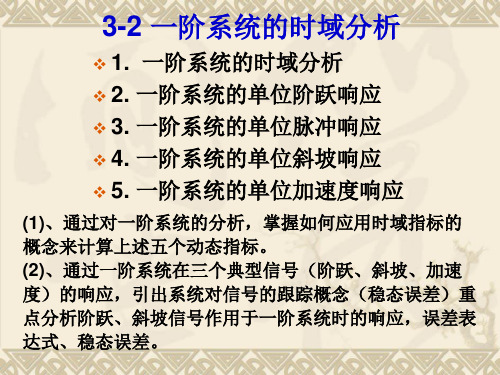
一阶系统的时域分析 2. 一阶系统的单位阶跃响应 3. 一阶系统的单位脉冲响应 4. 一阶系统的单位斜坡响应 5. 一阶系统的单位加速度响应
1.
(1)、通过对一阶系统的分析,掌握如何应用时域指标的 概念来计算上述五个动态指标。 (2)、通过一阶系统在三个典型信号(阶跃、斜坡、加速 度)的响应,引出系统对信号的跟踪概念(稳态误差)重 点分析阶跃、斜坡信号作用于一阶系统时的响应,误差表 达式、稳态误差。
t
讨论:动态指标与时间常数T有关,T越小,其响应过 程越快,即惯性越小,一阶系统又称为“惯性系统”。
3-2 一阶系统的时域分析
1.
一阶系统的时域分析
2.
3.
一阶系统的单位阶跃响应
一阶系统的单位脉冲响应
4.
5.
一阶系统的单位斜坡响应
一阶系统的单位加速度响应
3、一阶系统单位脉冲响应
98.2% 86.5%
T
b.求上升时间tr 由上升时间的定义,分别求出h(t1)=0.1;h(t2)=0.9 得:t1=0.1T;t2=2.3T 所以:tr=t2-t1=2.2T
c.同理可求出ts=3T(误差范围:±5%) d.一阶系统没有超调,所以不需要求tp和σ%。
99.3%
95%
1
0.632
(a)
R(s)
-
1 R
I(s)
1 Cs
C(s)
(b)
3-2 一阶系统的时域分析
1.
一阶系统的时域分析
2.
3.
一阶系统的单位阶跃响应
一阶系统的单位脉冲响应
4.
5.
一阶系统的单位斜坡响应
一阶系统的单位加速度响应
1 (s) 2、一阶系统的单位阶跃响应 Ts1 1 (t), R (s ) 设输入信号为单位阶跃输入 r(t)1 s 11 1 于是 H ( s ) ( s ) R ( s ) s Ts 1s ( Ts 1 ) 1 T 1 1 s Ts 1 s s 1 /T