基于运动控制卡的控制系统的设计与实现 Design and implementation
基于运动控制卡的两关节机械手臂控制系统设计设计

学校代码:学号:毕业设计(论文)BACHELOR DISSERT A TIO N论文题目:基于运动控制卡的两关节机械手臂控制系统设计学位类别:学科专业:机械设计制造及自动化作者姓名:导师姓名:完成时间:基于运动控制卡的两关节机械手臂控制系统设计摘要本次两关节的机械手控制系统的设计,我们用控制卡来进行设计。
通过微软公司开发的VC6.0软件,编制运动控制系统的控制界面,再在界面中的命令控件中进行参数的设置、代码编写。
继而把界面程序一一导入到我们所用的GT这一系列运动控制卡中,通过导入程序后的运动控制卡,来进行驱动电机的驱动器,继而再通过驱动器驱动伺服电机,同样地,之后就是通过伺服电机输出轴的输出的速度、转矩和转向,带动两关节机械手的运动。
这也就是说,最后机械手的运动轨迹就是我们之前在控制界面中通过代码设置的预定动作。
当然,在本次运动控制系统中还包括其他的辅助环节,比如各个器件之间的连线等。
本文介绍的控制系统,这当中最主要的部分当然是运动控制卡。
介绍了运动控制卡的硬件、接线方式、软件构成和里面的开发环境、信息传递与处理机制;两关节机械手等;与此同时,本篇论文也介绍了VC6.0编程的特点及调用函数的方式。
这次之所以基于运动控制卡进行设计,那是因为运动控制卡与以前的设备比较起来,有许多优点。
首先,运动控制卡用起来不麻烦,我们要做的就是在电脑上进行编程,对专业软件要求不高;还有就是,有很多新的能力,可以实现各种各样的轨迹控制;最后,它的结构不是分散的,能用在很多场合,与此同时,用户可以根据实际需要进行扩充。
关键词:运动控制卡; VC6.0;控制界面;机械手Based on the motion control card of two joint mechanical armcontrol system designABSTRACT.The two joints of the manipulator control system design, we use control card for design By Microsoft's VC6.0 software to compile the interface of the motion control system, then Set up the parameters and compile in the interface of the control design and compile codes, Then import the interface program to GT series of movement control CARDS, by importing the program to the movement control CARDS to drive the servo motor drive, then through the drive servo motor drive, in the same way, then through the output of the servo motor output shaft speed, torque and steering, driving motion platform movement. This means that in the control before the final motion platform trajectory is our interface through the reservation code is set. And, of course, in the motion control system includes other auxiliary links, such as the connection between each device, the rise and fall of pen rack, etc.This paper expounds the main content of the base principle and composition of control system, which core part is the movement control CARDS, motion control card was introduced in detail the hardware, the inside of the connection mode, software composition and development environment, information transmission and processing mechanism; The composition of two joints of the manipulator; At the same time, this paper also introduces the characteristics and calling function of VC6.0 programming approach. The design of motion control system is based on motion control card, that's because the movement control CARDS compared with the traditional numerical control device, has many advantages. First of all, the movement control CARDS of easy operation, as long as the simple programming can be on the computer, does not necessarily need very professional CNC software; Second, its function has been enhanced, can achieve a variety of trajectory control; Finally, it is the structure of the integrated modular, strong commonality, at the same time, the user can according to the actual need for expansion.KEY WORD: motion control card; VC6.0; Control interface; manipulator第一章绪论 (1)1.1 课题背景 (1)1.2开放式控制系统 (1)1.3 设计任务 (2)1.4设计要求 (2)第二章本次控制系统的结构组成 (3)2.1运动控制系统简介 (3)2.1.1 GT系列运动控制器 (5)2.1.2 伺服电机驱动器 (6)2.1.3 伺服电机 (6)2.1.4 两关节机械手 (7)2.2 安装步骤 (7)第三章系统控制界面的制作及程序的编写 (10)3.1 V C++编程 (10)3.1.1 V C 6.0介绍 (10)3.1.2 控制界面的编制 (12)3.2 动态链接库和GTCard类 (14)3.2.1动态链接库的调用 (14)3.2.2 GTCard类 (15)3.3 界面控制程序的编制 (17)3.3.1初始化程序 (17)3.3.2 回零程序 (18)3.3.3 曲线模式 (19)3.3.4 点动程序 (21)3.3.5 停止程序 (22)3.3.6 退出程序 (23)3.4 多轴协调运动 (24)3.4.1 坐标映射 (24)3.4.2 两轴直线插补 (24)3.4.3 两轴圆弧插补 (25)3.4.4 自定义曲线 (26)3.5 编译与运行 (28)第四章设计成果与不足 (30)第五章总结 (31)参考文献 (32)致谢 (33)第一章绪论1.1 课题背景随着我们人类自身的进步与发展,尤其表现在对知识的越来越懂和科技的研发加快、人类对劳动这个概念的转变、市场效益及利益驱动,人们制造出了各种机器来代替人工劳动,这是一次举足轻重的工业革命。
基于运动控制卡的转台控制系统设计
基于运动控制卡的转台控制系统设计作者:高群马俊林来源:《电脑知识与技术》2015年第06期摘要:设计了一种转台运动控制系统。
采用凌华PCI-8014A运动控制卡产生脉冲和方向等控制信号给伺服驱动器驱动伺服电机。
采用VC++ 编写控制程序软件,通过调用运动控制卡的函数库,实现转台系统的转速,加减速的实时闭环控制,达到了良好的控制效果。
关键词:运动控制卡;伺服控制系统;VC++中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2015)06-0220-02Designof Turntable Control System for DMD Based on Motion Control CardGAO Qun, MA Jun-lin(Research and Development Center for Opto-electronic, Changchun Institute of Optics ,Fine Mechanics and Physics,Chinese Academy of Sciences, Changchun 130033, China)Abstract: A turntable motion control system is designed. The signals of pulse and direction are produced by the ADLINK’s PCI-8134A motion control card and passed to the servo driver driving the servo motor. The control program software is writed by VC++. It realizedthe real time closed loop control of turntable system’s speed ,acceleration and deceleration and achieved good control effect.Key words: motion control card;servo control system;VC++随着工业的迅速发展,生产制造领域的自动化程度越来越高,人们对数控系统的灵活性要求越来越高。
基于运动控制卡的控制系统的设计与实现 Design and implementation

基金颁发部门:国家自然科学基金委;项目名称:宽谱XCT 的投影数据模拟以及投影数据校正方法的研究;编号:60551003;基金申请人:牟轩沁,邓振生;备注:本论文是基金项目中仪器设备研究科目:"控制X线机双能量曝光的控制设备"的控制方法研究之一。
基于运动控制卡的控制系统的设计与实现 Design and implementation of motion control systembased on motion control card柳叶青1,*邓振生1,陈真诚1,牟轩沁2LIU Ye-qing1, DENG Zhen-sheng, CHEN Zhen-cheng, MOU Xuan-qin2(1.中南大学信息物理工程学院生物医学工程研究所,湖南 长沙 410083;2.西安交通大学电子与信息工程学院图像处理与模式识别研究所,陕西 西安 710049)(1.Institute of Biomedical Engineering, School of Info-Physic and Geomatic Engineering, Central South University, Changsha, Hunan, 410083, China; 2. Institute of Image Processing and Pattern Recognition, The School of Electronic and Information Engineering, Xi'an Jiaotong University, Xi'an, Shanxi, 710049, China)摘 要:本文介绍了一个基于多轴运动控制卡的运动控制系统。
该系统以工控计算机、通用操作系统、PCI-8134多轴运动控制卡及其功能库函数为平台,采用VC++开发的人机界面,实现了三轴(X,Y,Z轴)独立运动、各个轴的连续直线运动以及梯形加减速运动等功能。
教案-基于DMC运动控制卡的运动控制系统设计及实现20110411

基于DMC运动控制卡的运动控制系统设计及实现试讲人:赵本利时间:2011-4-13 地点:佛职院机电系授课方式:讲授/实操重点:运动控制卡编程(实现)、系统控制方案的全面性(设计)难点:编程语言学习(实现)导入:(任务布置)1、运动控制应用领域:包括医疗(CAT扫描仪)、半导体(电路板特型铣)、纺织(地毯编织机)、物料搬运(包装机械)、食品加工(精密切肉机)、机床(超声焊接机)、产业机械(座标检验)、航天(空间摄像控制)、测试测量等等十分广泛。
2、系统控制方案要求:协调性、可靠性、稳定性、精密性。
正文:1、系统组成:主计算器、运动控制器、功率放大器、电机、传感器,即众所周知的闭环伺服系统。
一种典型的伺服系统如图1所示:图1、典型的伺服系统1.1、总体解说控制DC电机,用增量式编码器的数字位置系统伺服(亦适用于带有旋转变压器或绝对值编码器的AC或液压电机的系统)。
系统中各个元件的工作类似于人体,电机和功率放大器的结合VS于使人的四肢活动的肌肉。
功率放大器产生驱动电机所需要的电流,电机是产生运动的元件。
控制器是命令运动的智能元件,亦即系统的大脑。
它产生用于功率放大器的信号,称作运动命令。
位置传感器的功能类似于人的眼睛,它检测电机的位置并将结果告知控制器,即形成闭环。
闭环系统接收来自外部的命令,通常是主计算机,继续与人类社会相比较,命令源可以视作老板,产生命令,经常要求状态报告。
用其它方式如PLC,终端或开关组亦可产生命令。
1.2、部分解说:电机:更确切地讲,就是将电流转换成旋转扭矩。
DC电机的关键参数有扭矩常数Kt,电机电阻r,转动惯量Jm和最大扭矩。
扭矩常数单位为Nm/A或oz-in/A,它表示每个电流单位电机产生的扭矩量大小。
Eg:一台扭矩常数为0.1Nm/A的DC电机将2A电流转换成0.2Nm的扭矩。
电机特性是它所产生扭矩的大小,扭矩大小用两个参数来表达:连续扭矩和峰值扭矩。
功率放大器:一般是0~±10V输入端是模拟信号,利用线性放大器或脉宽调制(PWM)放大器方式来产生所需电压或电流,PWM放大器产生在高、低电平之间切换的电压,大多数功率在100W左右的放大器,均采用PWM方法以减少功率损耗。
基于FPGA的运动控制卡的设计和实现
关键 词 : 动 控 制 卡 ; 伺 服 电机 ; 分 频 ; 现 场 可 编 程 门阵 列 ; 外 设 部 件 互 连 标 准 总 线 ; 实 时 ; 乒 乓 操 作 运
me i, h g -p e aa s e m n g d t n a c e s se Sp e iin i e wa f i g a g o e ai g A e u n y d vso t c i h s e d d t t a i ma a e e h n et y t m’ r cso t y o n P r s o h nh P n p rt . n r f q e c i ii n a i me i a e n a d n e l c o n e ie . I C i i efe u n ya y d v s n fco  ̄ Th t nc n r l n a di r h t b s do d ig t p r o k c u tr s v n t a dv d q e c t t c wo c ig n r n a i ii t r o a emo i o t l gc o o i r s d b g e n i ltd wi ee e d dt o i n l a . An e , t ea a y i r s l a o t ro ie . e u g da ds mu a e t t mb d e l g aT p hh o S d t n h l ss e u t b u r r s v n h n e ig Ke r s mo i nc n o l g c d s r o moo ; fe u n y d v s n F GA; P u ; r a— me P n P go e a in ywo d : t o t l n a ; e v t r r q e c i ii ; P o r i r o CI s e l i ; i g a p r t b t n o
运动控制系统设计与实现

运动控制系统设计与实现随着工业自动化的发展,运动控制系统在控制技术方面的应用越来越广泛。
它不仅可以提高工作效率和品质,而且可以节约人力、物力和时间。
在各种应用方面,运动控制技术已成为现代自动化的关键技术之一。
一、运动控制系统概述运动控制系统是将运动控制程序运行在工业控制器上,通过对控制器输出的运动指令的控制,实现对运动物体的控制。
运动控制系统包括控制器、驱动器、电机、模块和传感器等部件组成。
其中,控制器是整个运动控制系统的核心,它通过与人机接口和外部设备的通信,接收、处理、输出指令来实现系统的功能。
驱动器是连接电机和控制器的中间部件,它起到控制电机转速和角度的作用。
电机是运动控制系统的执行部件,它转动从而实现控制目的。
模块可以增加系统的功能,如通信模块、模拟量模块、数字量模块等。
传感器可以对控制对象采集实时数据并反馈,实现对控制对象的准确定位、速度和加速度的控制。
二、运动控制系统设计流程1.需求分析在运动控制系统的设计中,首先需要进行的是需求分析。
需要了解用户的需求、物体的运动要求、工作环境以及其他相关因素,以确定运动控制系统的基本功能与性能指标。
2.技术方案选择针对需求分析结果,可以选择适合的运动控制器、驱动器、电机、模块和传感器等部件,确定运动控制系统的技术方案。
3.硬件电路设计根据运动控制系统的技术方案,设计出硬件电路,包括一些关键电路的原理图和PCB板图等。
硬件电路设计与实现是运动控制系统设计的重要环节。
4.软件程序设计软件程序设计是运动控制系统设计的另一重要环节。
根据确定的技术方案和硬件电路设计,编写程序源代码,通过编译、链接等步骤生成可执行的程序。
软件程序设计是实现运动控制系统功能的关键。
5.系统调试在运动控制系统的设计和实现过程中,系统调试是必不可少的,它包括硬件调试、软件调试、系统运行调试和参数优化等过程。
系统调试过程需要对系统每项性能指标进行检测、分析和调整,以达到优化系统性能的目的。
基于运动控制卡的开放式数控系统研究毕业设计论文
兰州交通大学毕业设计(论文)摘要数控系统的开放性是当今数控系统发展的主流,开放式数控系统研究的目地是开发一种模块化的、可重构的、可扩充的控制系统的结构,以增强数控系统的柔性,在体系结构上给用户二次开发留有更多的余地,从而可以快速的响应新的加工需求。
概述了数控系统的发展现状,介绍了开放式数控系统的结构,在此基础上提出了一套NC嵌入PC型的开放式数控系统,并对其软硬件进行了研究。
数控系统是一种以PC为硬件平台的控制系统,PC以其良好的开放性成为数控系统的基础。
开放式数控系统按其结构可以分为:NC嵌入PC型、PC嵌入NC型以及全软件型,在分析了这几种数控系统的优缺点后,重点研究了NC嵌入PC型的开放式数控系统,对其软硬件进行分析,设计出了数控系统的总控制框图,并使用VB做出了数控系统的控制界面。
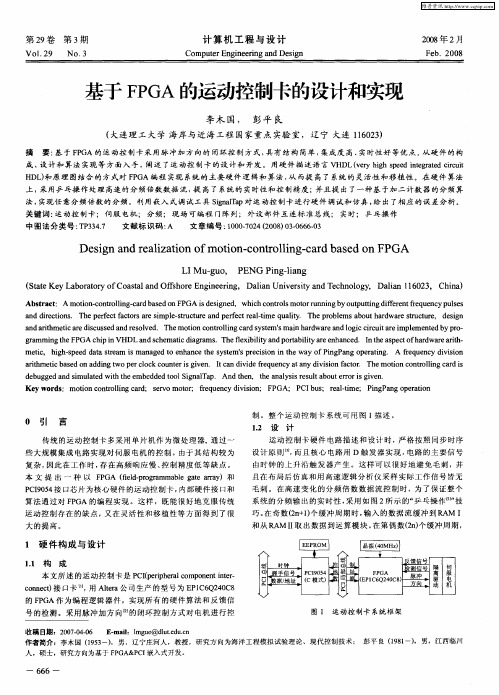
关键字:数控系统;NC嵌入PC型;运动控制卡;硬件;软件1兰州交通大学毕业设计(论文)AbstractNowadays the characteristic of openness of the CNC systems is becoming one of the most important directions of CNC development. The research of openness into the CNC systems aims to build a modular, reconfigurable and expandable architecture of CNC systems to improve the system’s flexibility and to enable the re-development of the systems. As a result, the CNC systems can respond to the market quickly and economically.Based on the general situation about NC system development, it presents the architecture of opening NC-embedded PC system. It introduces the hardware and software in this system. The CNC system, which is a kind of control system based on PC hardware platform, is categorized according to the different functions of PC in the system. The opening style computerized numerical control system can be divided into three forms according to their structure: NC embedded PC structure, PC embedded NC structure and the whole software model. After the analysis of the advantages and disadvantages of these types of CNC systems, the study focuses on the opening NC embedded PC system’s hardware and software. By analyzing the overall control of the CNC, the author designs the general system block diagram and develops the control interface of the NC system by VBKey words: Computerized numerical control (CNC) system; Opening; NC embedded PC; Motion control card; Hardware; Software2兰州交通大学毕业设计(论文)毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
基于ADT-864运动控制卡的数控系统设计
时任务 。工业控制计算机 的控制内核是整个数控系统的核心, 它
控系统~个当前刀位信号, 系统把设定 刀位编号与当前刀值编号 【越来越得到广 泛n应用。 } 1 0 由于数控车床控制系统的设计在很大 进行 比较 , 当两者相等时刀架开始换刀, 换刀结束后( 换刀监控时 程度上决定着整个车J 爪的性能。因此文章中做 了较详细的设计 , 间和锁紧监控时间由 P C定时器决定 ) L ,数控系统发 出停止信 但对数控车床辅助系统例如刀架 、 卡盘 、 台尾的液压控制系统和 号, 控制刀架停止运动。 当两者不等时继续转到下 一 个刀位 , 直到 冷却系统 、 排屑系统 、1 r动回转刀架等机械部分的设计 , 此外还有 转到既定位置再换刀。 数控系统 中的其他执行元件控制过程类 比 高速车床的后续工作如电器元件的选用 、 液压元件设计 、 控制柜 于刀架控制过程。
准化 的外 设 、 软件 进行 灵 活 的组 合 和使用 。将介 绍 一种 采用 应用
此模式中, 运动控制卡主要承担实时性任务 , 如伺服控制 、 路
“C 运动控制卡” P+ 、运行与 Wi o s00操作系统的数控系统。 径规划 、 n w20 d 可编程逻辑控制等 ; 工也控制计算机主要完成系统管理、 该系统通过 A T 8 4 D - 6 运动控制卡的使用 ,使得系统 的硬件结构 数控编程 、 数控仿真 、 形插补和人机界面管理 、 网络功能等非实
机 械 设 计 与 制 造
1 40
文 章 编 号 :0 13 9 ( 0 00 — 10 0 10 — 9 7 2 1 )7 0 4 — 2
M a h n r De i n c iey sg
&
M a u a t r n fc u e
第7 期 21 0 0年 7月
运动控制系统的设计与实现
运动控制系统的设计与实现第一章引言运动控制系统是指通过控制机械和电子设备的运动,以实现某些特定的目标。
它的应用范围很广,包括工业、农业、医疗、交通等领域。
在本篇文章中,我们将重点讨论运动控制系统的设计与实现。
第二章运动控制系统的组成运动控制系统主要包括以下几个方面的组成:1. 传感器:用于检测被控制物体的位移、速度、加速度等参数。
2. 执行器:用于对被控制物体进行控制,例如电机、液压缸等。
3. 控制器:用于接收传感器采集的数据,根据预设的控制算法计算出控制信号,控制执行器对被控制物体进行控制。
4. 供电系统:为控制器和执行器提供电源供应,保证运动控制系统的正常运转。
第三章运动控制系统的设计运动控制系统的设计是一个复杂的过程,需要针对具体的控制对象进行定制化设计。
下面讨论运动控制系统设计中的几个重要方面。
1. 传感器的选择传感器的类型根据被控制物体的不同而不同,例如在控制机械臂的过程中,需要使用角度传感器、位移传感器等。
传感器的精度和灵敏度对于控制系统的性能和稳定性有着很大的影响,在设计中需要根据实际需要灵活选择。
2. 控制算法的设计控制算法是运动控制系统的核心,需要根据被控制物体的特点和控制目标进行设计。
例如在机械臂的控制中,可以采用PID控制算法进行位置控制,速度控制和力矩控制。
3. 控制器的选择控制器一般有单片机、PLC或者工控机等。
在选择控制器时,需要根据控制的任务和要求,选择适合的控制器。
例如在小规模控制任务中可以使用单片机,但在复杂控制任务中需要使用工控机。
4. 系统的可靠性设计在运动控制系统的设计中,需要考虑到系统的可靠性,尽可能的降低故障率。
例如可以采用备件系统来解决某些关键部件故障的处理。
第四章运动控制系统的实现运动控制系统实现主要包括以下几个步骤:1. 系统的硬件搭建系统的硬件包括传感器、执行器、控制器、供电系统等。
在搭建过程中需要特别注意硬件的兼容性和稳定性。
2. 控制算法的编写控制算法的编写一般使用C语言、Python等编程语言进行编写。
基于运动控制卡的机械手控制系统设计
r t n= GT
_
GT U p d a t e ( ) ; )
控制 闭环 时, 可用数字伺服滤波器输 出信号控制 , 它包含 P I D滤波器 。 在调节各个参数后 , 它能精确 而稳定地控制大部
分系 统。 Kd 、 Ki 、 Kp 、 Ka f , K v f是 系 统 中 的 主要 参数 。它 很 大
转, 编码器则发送反馈信号来调整 电机运转 。
d o u b l e c n t l [ 5 ] ={ 1 0 0 0 , 0 , 0 , 0 , 0 ) : d o u b l e c n t 2 [ 5 ] ={ 0 , 1 0 0 0 , 0 , 0 , 0 ) : d o u b l e c n t 3 [ 5 ] ={ 0 , 0 , 1 0 0 0 , 0 , 0 } : d o u b l e c n t 4 1 - 5 ] ={ 0 , 0 , 0 , 1 0 0 0 , 0 } ;
GT Ma , p A x i s ( 1 c n t 1 ) ;
_
2 运 动控 制卡 的程序 编 写
开放式 结构 的运动控制卡功能 多样 , 使用简单, 可靠性也 很 高 。其 软 件 上 提 供 的 运 动 控 制 函 数 库 非 常 全 面 , 满 足 了各
种要求 。 运 动 控 制 函 数 库 由系 统 初 始 化 函 数 、 时 间控 制 函 数 、 运 动 控 制 函数 和 数 字 量 输 入 输 出 函 数 四 部 分 组 成 。 系 统 初
业 生产 任 务 的迅 速 变 化 。 因此 我 们 需 要 使 用 结 构 较 为 开 放 式
的控制器 。本文介绍 了一种基于运动控制卡 的机械手控制系
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基金颁发部门:国家自然科学基金委;项目名称:宽谱XCT 的投影数据模拟以及投影数据校正方法的研究;编号:60551003;基金申请人:牟轩沁,邓振生;备注:本论文是基金项目中仪器设备研究科目:"控制X线机双能量曝光的控制设备"的控制方法研究之一。
基于运动控制卡的控制系统的设计与实现 Design and implementation of motion control systembased on motion control card柳叶青1,*邓振生1,陈真诚1,牟轩沁2LIU Ye-qing1, DENG Zhen-sheng, CHEN Zhen-cheng, MOU Xuan-qin2(1.中南大学信息物理工程学院生物医学工程研究所,湖南 长沙 410083;2.西安交通大学电子与信息工程学院图像处理与模式识别研究所,陕西 西安 710049)(1.Institute of Biomedical Engineering, School of Info-Physic and Geomatic Engineering, Central South University, Changsha, Hunan, 410083, China; 2. Institute of Image Processing and Pattern Recognition, The School of Electronic and Information Engineering, Xi'an Jiaotong University, Xi'an, Shanxi, 710049, China)摘 要:本文介绍了一个基于多轴运动控制卡的运动控制系统。
该系统以工控计算机、通用操作系统、PCI-8134多轴运动控制卡及其功能库函数为平台,采用VC++开发的人机界面,实现了三轴(X,Y,Z轴)独立运动、各个轴的连续直线运动以及梯形加减速运动等功能。
关键词:PCI-8134运动控制卡;运动控制;VC++Abstract: In this article, a motion control system based on control card of multi-axis movement was introduced. It is grounded on the industrial computer, the common operation system; a multi-axis motion control card, PCI-8134, and its movement function library, the interface in VC++ Language can be programmed in order to implement the control. The motion control functions include the movement of three axes separately; continuous linear movement and T-curve acceleration/deceleration movement of each axes, etc.Key words: motion control card PCI-8134, motion control, VC++0 引言运动控制技术的发展是推动新的产业革命的关键技术。
传统的数字运动控制装置一般直接采用微机或单片机来实现位置控制,外围电路复杂,计算速度慢。
近年来,对运动控制系统的速度和精度的要求愈来愈高,使得传统的运动控制系统难以取得满意的控制效果,因此急需一种运算速度快、可以满足高精度运动控制的。
随着技术的成熟稳定,目前市场上出现了种类繁多的运动控制卡。
本研究利用基于PCI总线的PCI-8134多轴运动控制卡及其功能库函数、工控计算机,设计了可控制多轴的步进电机、按照编程预定的运动轨迹及运动参数作定位运动的控制系统。
本系统具有通用性,可方便地移植到各种运动控制系统的开发中去,例如机器人、雕刻机及专用数控机床的开发等。
1 基于运动控制卡的运动控制系统实现原理运动控制卡通常采用专业运动控制芯片或高速DSP作为运动控制核心,大多用于控制步进电机或伺服电机。
运动控制卡与PC机构成主从式控制结构:PC 机负责人机交互界面的管理和控制系统的实时监控等方面的工作,例如键盘和鼠标的管理、系统状态的显示、运动轨迹规划、控制指令的发送、外部信号的监控等等;控制卡完成运动控制的所有细节,包括脉冲和方向信号的输出、自动升降速的处理、原点和限位等信号的检测等。
运动控制卡通过板卡接口输出PC机运算结果的运动控制脉冲数和运动方向控制等信号,经过伺服驱动功率放大器放大后,驱动步进电机或交流数字伺服电机转动,再通过滚珠丝杠传动机械,驱动两轴或三轴精密十字工作台运动。
对于运动目标位置控制通常有两种模式:一种模式是采用步进电机驱动的开环控制系统模式,另一种是采用交流数字伺服电机驱动闭 * 本文通讯作者:邓振生环控制系统模式。
前者因为步进电机每个脉冲的转过的步距角一定并与控制脉冲数成正比,在转动一圈的过程中无累积误差,加上目前具有步距角细分技术的步进电机驱动控制器己是成熟技术,因此用开环系统也能达到一定的精度。
后者将光电编码盘等传感器检测的目标位置,经由控制卡反馈至伺服控制驱动器,驱动电机运转。
如采用步进电机开环控制系统,能实现0.01mm 的位置控制精度。
如采用交流数字伺服电机及光电编码盘位置检测,构成闭环反馈控制系统,则能实现更高的位置控制精度。
2 PCI-8134运动控制卡PCI-8134是基于PCI总线的多轴运动控制卡。
PCI总线是一种先进的高性能32/64位地址数据复用局部总线,可以同时支持多组外围设备,具有高数据传输率、即插即用、低功耗、适应性强等特点。
图1为PCI-8134运动控制卡的系统结构图。
系统所采用的PCI专用接口芯片PCI9052与PCI总线之间的高速通信;芯片PCL5023实现运动控制。
如图所示:系统采用两片PCL5023芯片实现对电机的运动进行控制。
其中一片PCL5023控制轴一和轴二,另外一片PCL5023控制轴三和轴四。
通过高频脉冲驱动步进电机或者伺服电机,完成预期的速度输出要求。
同一系统中可以同时使用多块本款运动控制卡(最多可以使用12块卡,即同时控制48个轴),从而达到对多轴的运动控制,满足在多种情况下的运动控制要求。
图1 PCI-8134系统结构图PCI-8134能够产生高频率的脉冲序列。
脉冲序列的频率控制电机的转速,脉冲的数量控制电机的位置,而差动输入/输出信号能够减少噪声的影响。
指令输出选项包括DIR/OUR 模式与CW/CCW模式。
3 基于PCI-8134运动控制卡运动控制系统的开发3.1本系统可实现的主要功能(1) 可实现三轴(X,Y,Z轴)独立运动;(2) 可设定各轴的速度参数实现连续运动;(3) 可设定速度及加减速时间参数做梯形加减速运动;3.2 基于PCI-8134运动控制卡的软件开发基于PCI-8134运动控制卡的软件开发具有良好的开放性, 用户可以在DOS、VC、VB 环境下做软件开发。
在这里是在Windows XP系统下利用VC ++ 6.0 的MFC以面向对象方式进行编程。
底层开发库采用了运动控制卡提供的静态库pci_8134.lib、头文件pci_8134.h。
3.2.1 运动控制卡的安装将PCI-8134运动控制卡插入PCI插槽中。
根据具体的硬件平台,可设置卡上的开关,用于设置脉冲输出信号的信号种类(differential line driver output, open collector output),限位开关的工作模式(normal open ,normal close)等参数。
3.2.2 卡的初始化在VC++中创建一个基于对话框的motion工程,将pci_8134.LIB、头文件pci_8134.H添加进工程。
在所建工程的On InitDialog中进行初始化工作,调用W_8134_initialA( ),用于确认运动控制卡是否存在并且将其初始化;利用Motion Creator 中的Config Axis 来配置各轴,其中可以设置脉冲输出的模式,位置反馈的模式,限位开关的工作模式, 伺服信号的使用与否,中断信号控制等配置信息。
并将设置好的信息保存,将其存为8134.cfg文件,调用以下语句来初始化运动卡、配置卡的各种信息:cardno =W_8134_InitialA(&TotalCards);GetSystemDirectory (SysDir, 1024); FStr.Format ("%s", SysDir);FStr+="\\8134.cfg";Err=W_8134_Set_Config (FStr.GetBuffer (0));for (i=0; i<TotalCards; i++){W_8134_INT_Enable (i, &hEvent [4*i]);W_8134_Set_INT_Control (i, TRUE);}SetTimer (1, 100, NULL);至此,通过_8134_set_config()此函数的调用,就将Motion Creator 所提供的Configuration 窗口转化成为应用程序,按照8134.cfg文件配置了卡的参数,并设置了定时器。
3.2.3 人机用户界面的设计及相关功能图2 操作主界面在对话框中添加按钮,如图2所示。
基于运动控制卡控制系统的操作主界面。
界面上部是X、Y、Z轴的运动响应按钮,便于控制各轴的独立运动。
下面是显示各轴的运动位置。
中间是运动模式选项,包括连续运动和梯形运动。
做连续运动时,各轴以指定初速度、及加速时间运动到设定的速度,然后开始做连续匀速运动,直到收到停止命令为止;做梯形运动时,各轴以设定的初速度加速运动到指定的最大运动速度,随后减速并最终停止在设定的位置上。
界面最下方的两个设定表格是各轴运动速度设定和加速、减速、初速度的设定。
停止按钮用于结束各个轴的运动。
退出按钮结束程序。
此界面主要实现控制操作功能。
3.2.4 运动控制功能的实现根据所设计的人机界面以及所需要实现的运动控制功能,在界面中各个命令按钮的响应函数中编程实现。
对话框上端的X、Y、Z轴按钮时,要从速度设定、其他设定编辑框中读取各轴相应的运动速度,加速时间,减速时间和其初速度,根据所选择的运动模式,我们可以选择性的读取这些设置,参数的选择及运动控制过程如图3:图3 运动控制流程实现过程如下:在X (Y、Z) 轴按钮的单击事件命令响应函数中调用v_move(axis,str_vel, max_vel , Tacc)用于实现连续运动模式时三轴的独立运动,在结束运动按钮单击事件命令响应函数中调用v_stop(axis,Tdec),停止各轴的运动。