行星齿轮传动机构
自动变速器行星齿轮机构---第三章
2. 功率流分析 规则: (1)一端所受转矩方向与其转速方向相同 (M、n或-M、-n),功 率为正,输入端 (2)一端所受转矩方 向与其转速方向相反 (M、-n或-M、n), 功率为负,输出端 转速(+,-)
三、传动效率 相对功率法: 根据行星排各构件的相对转速、转矩和传递 功率计算。 两点假设: 1. 只计算和相对运动有关的齿轮啮合损失, 其它不计; 2. 相对运动的齿轮啮合损失与定轴传动相同, 外啮合效率0.97,内啮合效率0.98。
2. 档位情况
选档杆 位置 换档执行元件 C1 1 D 2 3 2 L R 1 2 1 倒档 ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ C2 B1 B2 B3 F1 F2 ○ 发动机 制动
档位
P
N
驻车档
空档
○
3. 各档动力传动路线:
1) D1档:C1、F2
主动太阳轮
从动行星架
行星小齿轮
主动齿圈
• 8) 如果所有元件无约束,则动力无法传动 • 空档
太阳轮
行星架
行星小齿轮
主动齿圈
二、车辆传动用行星齿轮机构 1. 单星行星排:一个行星轮同时内外啮合 普通式行星排 复式双联行星排
2. 双星行星排: 两个行星轮 普通式 长短行星轮式 3. 圆锥行星齿轮 行星排 行星架输入动 力,太阳轮输出 对称结构 非对称结构
z
w 3 1 2
实现一个档要结合2-1个
操纵件
如有2个操纵件
可得
C 2
1 z
个档
2. 行星机构速度关系式(数学分析法) 给整个行星机构加反向转速nj,对绝对座标: 行星架转速= nj- nj=0 太阳轮转速= nt- nj 齿圈转速= nq-nj,按定轴传动处理
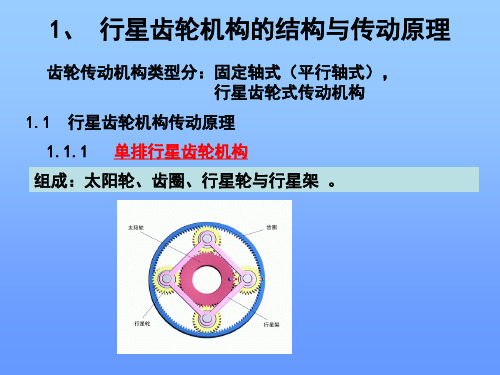
行星齿轮机构的三个基本元件

行星齿轮机构的三个基本元件
行星齿轮机构是一种常见的传动机构,由三个基本元件组成,分别是行星轮、太阳轮和内齿圈。
1. 行星轮:行星轮是行星齿轮机构中的一个轮子,通常固定在一个轴上并绕着太阳轮旋转。
行星轮通常有多个齿,与太阳轮和内齿圈相配合,实现传动。
2. 太阳轮:太阳轮是行星齿轮机构中的另一个轮子,通常位于中间,不旋转而是固定在机构的中心轴上。
太阳轮与行星轮和内齿圈相配合,实现传动。
3. 内齿圈:内齿圈是行星齿轮机构中的第三个轮子,通常是一个环形结构,内部有齿。
内齿圈不旋转而是固定在机构中,与太阳轮和行星轮相配合,实现传动。
这三个基本元件相互配合,构成了行星齿轮机构,可以实现高效的传动和变速。
行星齿轮机构广泛应用于各种机械和设备中,如汽车变速器、机床传动装置等。
行星齿轮传动机构
5)行星架固定,太阳轮主动,齿圈被动。
此种组合为降 速传动,传动 比一般为1.5~4, 转向相反。
6)行星架固定,齿圈主动,太阳轮被动。
此种组合为升速 传动,传动比一 般为0.25~0.67, 转向相反。
注意以下情况:
1)把三元件中任意两元件结合为一体的情况: 当把行星架和齿圈结合为一体作为主动件,太阳
当发动机曲轴带动泵轮旋转时,泵轮带动自动变速器油一
起旋转,在离心力的作用下,自动变速器油从叶片的内缘向外 缘流动。
冲击涡轮的叶片,自动变速油沿着涡轮叶片由外向内流动, 冲击到导轮叶片,然后沿着导轮叶片流动,回到泵轮进入下一 个循环。
我们把从泵轮、涡轮、导轮又 到泵轮的液体流动叫涡流。
自动变速器油在进行涡流的同时,又绕曲轴中心线 旋转,我们把液体绕轴线旋转的流动,称为环流。
(三)典型液力变矩器 它包含锁止离合器和单向离合器
1、单向离合器
1) 单向离合器的组成: 由外座圈,内座圈、保持架、
楔块等组成。
2) 工作原理: 当内座圈固定时,外座圈顺时针方向转动楔块不锁止,外座
圈可自由转动;当外座圈逆时针转动时,楔块锁止,外座圈不能 转动。保持架的作用是使楔块总是朝着锁止外座圈的方向略微倾 斜,以加强楔块的锁止功能。
液力变矩器的工作原理
液力变矩器的工作原理
用空气传递动力会有能量损失,且电风扇B的转速永远小 于A的转速。如果我们将电风扇A与B用一个轴连接在一起, 此时电风扇A可直接带动B同速转动,就没有能量损失。
此时的电风扇A相当于液力变矩器的泵轮,电风扇B相当
于涡轮,导管相当于导环,空气相当于自动变速器油,连接 轴相当于锁止离合器。
行星齿轮传动机构
三、行星齿轮传动机构换档控制元件 1、单向自由轮 2、离合器(液压执行元件) 3、制动器(液压执行元件)
行星齿轮机构的结构与传动原理
四、直接传动★
n1
n2 刚性联接3
直接传动:传动比=1 条件:任何两元件被刚性联接。 n1+αn2-(1+α) n3 = 0 n3= n1或n3= n2或n1= n2 传动比=1
五、增速传动
制动n1
输出n2 输入n3
一)、 ★增速传动:传动比=α/(1+α ) 条件:主动件-行星架,被动件-齿圈,固定件-太阳轮。 n1+αn2-(1+α) n3 = 0 n1=0 传动比=n3/n2=α/ (1+α )
三、带式制动器
带式制动器结构:
1-变速器壳体 2-制动带 3-制动鼓 4-活塞 5-液压缸施压腔 6-液压 缸端盖 7-液压缸释放腔 8-推杆 9-调整螺钉 10-回位弹簧
带式制动器工作过程:
间隙如何测量、调整?
1.2.3、单向离合器
常见类型有:棘轮式、滚柱斜槽式 和 楔块式单向(超越)离合器 作用:连锁作用,固定作用,改善换档的平稳性。
1、滚柱斜槽式单向(超越)离合器
1-外环 2-内环 3-滚柱 4-弹簧。
二、楔块式单向(超越)离合器
1-外环 2-内环 3-楔块。
三、棘轮式单向(超越)离合器
1-外轮 2-棘爪 3-棘轮 4-叶片弹簧。
四、单向离合器作用
(1) 连锁作用 ---将二元件直接连接使之一起运动。
(2) 固定作用—将行星齿轮机构中某一元件与壳体相连,使该元件被固定。
制动n2
输出n1
输入n3
二)、增速传动:传动比=1/ (1+α ) 条件:主动件-行星架,被动件-太阳轮,固定件-齿圈。 n1+αn2-(1+α) n3 = 0 n2=0 传动比=n3/n1=1/ (1+α )
双排行星齿轮工作原理

双排行星齿轮工作原理
双排行星齿轮是一种常见的齿轮传动机构,它由两个行星齿轮和一个太阳齿轮组成。
它的工作原理主要包括以下几个方面:
1. 太阳齿轮:太阳齿轮位于两个行星齿轮之间,它与传动输入轴相连。
当太阳齿轮转动时,会产生动力输入。
2. 行星齿轮:行星齿轮是两个,并且它们的齿轮数相同。
行星齿轮上有多颗齿与太阳齿轮咬合,行星齿轮可以绕自身轴线旋转,并且可以绕太阳齿轮转动。
3. 轴:行星齿轮的轴即为输出轴,通过与齿轮连接,实现输出扭矩和转速。
工作原理如下:
1. 开始时,太阳齿轮和行星齿轮静止不动。
2. 动力输入:当太阳齿轮开始转动时,由于行星齿轮与太阳齿轮的咬合,行星齿轮也会开始绕太阳齿轮旋转。
3. 输出:行星齿轮的旋转会带动输出轴一起旋转,从而实现输出扭矩和转速。
4. 变速:通过改变太阳齿轮的转速和行星齿轮的咬合方式,可以实现不同的变速比。
需要注意的是,双排行星齿轮传动具有高效、扭矩稳定、结构紧凑等优点,广泛应用于各种机械传动系统中。
三齿轮传动机构

◆ O/D档→输入轴→C1→后圈→后星
后架→
└太阳轮→前星→前圈→→ 输出轴
└前架F2逆止
◆ D1传动比;1.00×2.804
47
AT
AT
丰田A340E-D2档(后两排传动)
◆ O/D档→输入轴→C1→后圈→后星→后架→→→→→输出轴 └太阳轮被B2.F1锁住
◆ D2档传动比:1.00×1.531
一个外齿轮与一个内齿轮啮合时,转动 方向相同。
太阳轮、齿圈、行星架、三者齿数的关 系是:行星架>齿圈>太阳轮
7
AT
AT
§3.2 行星齿轮机构的变速原理
◇ 行星齿轮机构参数α:
z2 >1
z1
Z1-太阳轮齿数 Z2-齿圈齿数
◇ 单排行星齿轮机构运动特性方程式:
n1 n2 1 n3 0
外圈转速)、前排滑转。
37
AT
AT
4T65E-D3档
D3档 动力传动路线 ;
┌→ C3→F2←前太← ┐
链轮┴→ C2→→→前架 →┴→前圈→主减速器
D3档 传动比; 1.00
↓
传动;C2+C3 锁止;F2
→
38
AT
AT
D3 档 动 力 传 递 说 明
输入 输入
输出
C2和C3分别传递动力前架后圈和前太阳轮。 F2逆向锁止(内圈转速>外圈转速),故C3
50
AT
AT
丰田A340E-R档
◆ O/D档→输入轴→C2→太阳轮→前星→前圈→输出轴 └前架被B3锁住
◆ R档传动比:1.00×2.220
51
AT
AT
大众01M自动变速器
B2 C2 C1
C3
自动变速器电子教案10单排行星齿轮机构原理
但由于行星架为输出且与车身相连,阻力较大不能转 动,因此,全部转矩加在齿圈上,使齿圈逆时针空转,不可 能有转矩从齿轮架输出。
行星齿轮机构在此状态下处于空档状态 。
4)行星齿轮传递的动力被分配到数 量众多的啮合齿上。与手控变速器 相比结构更为小型、紧凑。
4、传动比计算:
1)行星架等效齿数: Z圈——内齿圈齿数 Z太——太阳轮齿数 Z行架——行星架架齿数
行星小齿轮在传动过程始终用作中间齿轮,它们的齿数与 行星齿轮机构的传动比无关,行星齿轮机构的传动比只取决 于齿轮架、内齿圈和太阳轮的齿数,齿轮架并非齿轮因此没 有实际齿,在计算传动比时对行星齿轮架指定一个想像的齿
4)同向、增速(前进档的超速档状态):
①同向增速状态a 固定——内齿圈 主动——行星架 从动——太阳轮
内齿圈被固定后,当齿轮架顺时针方向旋转输入时,迫使 小齿轮在内齿圈内按顺时针方向公转,同时又绕小齿轮轴反时 针方向自转,使太阳轮必定按顺时针方向旋转输出。
传动比 i=从动齿齿数/主动齿齿数 = Z太/ Z行架
单排行星齿轮传动机构
影像
1、三基本元件:
太阳轮
组
成
一
齿圈
个 行
星
行星轮和行星轮架
排
2、各部件相互关系:
太阳轮:
是一个具有外部齿的齿轮,可以绕自身轴线旋转,同行星齿 轮外啮合。
齿圈:
是一个具有内齿的齿圈,可以绕自身轴线旋转,同行星齿轮 内啮合。
行星轮和行星轮架:
行星轮通过轴安装在行星轮架上,在轴上能绕固定轴转动, 即自转,还可以同行星轮架一起绕太阳轮转动,即,公转; 行星轮的内端同太阳轮外啮合,外端同齿圈内啮合。
2K—H型行星齿轮机构传动的啮合效率分析
2K—H型行星齿轮机构传动的啮合效率分析H型行星齿轮机构是一种新型的传动机构,具有许多优点,例如传动效率高、结构紧凑等。
啮合效率是评价传动机构性能的重要指标之一,本文将对2K—H型行星齿轮机构的啮合效率进行详细分析。
首先,我们需要了解2K—H型行星齿轮机构的结构。
2K—H型行星齿轮机构由一个太阳轮、两个行星轮和一个内啮合的外齿圈组成,其中每个行星轮上分别有两个齿轮。
当输入轴驱动太阳轮转动时,通过行星轮上的齿轮和外齿圈的啮合,实现输出轴的转动。
为了分析啮合效率,我们首先需要确定啮合损失。
啮合损失主要包括啮合瞬时速度失配损失、摩擦损失和轴向力损失。
啮合瞬时速度失配损失是由于齿轮啮合时速度不同导致的能量损失,摩擦损失是由于齿轮啮合摩擦产生的能量损失,轴向力损失是由于齿轮啮合时的轴向力引起的能量损失。
其次,我们需要计算2K—H型行星齿轮机构的传动效率。
传动效率可以通过下式计算得出:其中,\(P_{out}\)为输出轴功率,\(P_{in}\)为输入轴功率。
传动效率与啮合效率直接相关,啮合效率越高,传动效率也就越高。
最后,我们可以通过仿真软件对2K—H型行星齿轮机构的啮合效率进行分析。
通过建立相应模型,设定合适的工作参数,进行仿真计算得出啮合效率,进而评估传动效率。
通过不断调整参数,优化设计,可以提高传动效率,使其更加稳定可靠。
总之,对2K—H型行星齿轮机构的啮合效率进行分析是非常重要的。
通过深入研究,我们可以更好地了解其工作原理,找出影响啮合效率的关键因素,进一步提高传动效率,实现更好的性能表现。
希望本文的分析能够为相关领域的研究和工程实践提供参考和帮助。
行星齿轮机构结构
支架优化设计
减轻支架的重量
支架是行星齿轮机构中的支撑部件,其重量的轻重对整个 机构的重量有很大影响。在满足使用要求的前提下,应尽 量减轻支架的重量。
提高支架的刚度和稳定性
支架在工作过程中需要承受机构的载荷和弯矩,因此需要 具有良好的刚度和稳定性。可以通过优化支架的结构设计、 增加加强筋等方法来提高其机械性能。
太阳轮的受力分析
太阳轮受到来自行星轮的力矩作用,这些力矩的大小和方向取决于行星轮的位置和 转速。
太阳轮受到的力矩可以分解为切向力矩和径向力矩,切向力矩用于驱动太阳轮旋转, 径向力矩则用于平衡太阳轮的离心力。
太阳轮的受力分析需要考虑太阳轮与行星轮之间的接触力和摩擦力,以及太阳轮自 身的重力和离心力。
单级行星齿轮机构
结构简单,由太阳轮、 行星轮和转臂组成。
制造和维护成本较低。
传动比范围较小,通 常用于高速、小扭矩 的传动系统。
双级行星齿轮机构
由两个单级行星齿轮机构组成, 通过中间齿轮连接。
传动比范围较大,通常用于中 低速、大扭矩的传动系统。
结构相对复杂,制造和维护成 本较高。
多级行星齿轮机构
02 行星齿轮机构的基本组成
行星轮
01
行星轮是行星齿轮机构中的重要 组成部分,通常由一个或多个齿 轮组成,它们围绕一个共同的旋 转中心(即行星轮轴)旋转。
02
行星轮的主要作用是传递动力, 它们可以与太阳轮和内齿圈啮合 ,从而实现动力的传递和减速。
太阳轮
太阳轮是行星齿轮机构中的另一个重 要组成部分,它通常位于机构的中心 位置,并与行星轮和内齿圈啮合。
1
行星轮受到来自太阳轮和内齿圈的力矩作用,这 些力矩的大小和方向取决于行星轮的位置和转速。
1-3 行星齿轮传动机构
2.制动器
功用:将行星排中的太阳轮,齿圈,行星架这3元件之一固定; 类型:湿式多片制动器和带式制动器; 湿式多片制动器结构:多片湿式制动器的结构和工作原理与
离合器的结构、原理大至相同。区别在于它的钢片连接的 制动鼓或变速器壳体是固定的。(图) 带式制动器的结构:制动鼓、制动带、活塞顶杆、活塞、 回位弹簧、活塞缸等组成。 带式制动器的原理:液压施加活塞,活塞移动推动制动带,使 制动带直径变小,夹持制动鼓,使制动鼓固定;反之当油液退 出后,在回位弹簧作用下活塞回位;(图)
工作情况表(表) 思考:工作路线
3.单向离合器
功用:它依靠单向锁止原理来固定或连接几个行星元件. 锲块式单向离合器原理:由外座圈,内座圈,锲块等组成;锲
块在一方向上略大于内外座圈距离,而另一方向略小于内 外座圈距离;所以当顺时针方向,内外座圈同时运动,而逆 时针时内外座圈锁止;(图)
三 行星齿轮机构各档变速原理
1.辛普森式3档行星齿轮机构 2.辛普森式4档行星齿轮机构 3.拉维尼克斯行星齿轮机构(思考)
1.辛普森式3档行星齿轮机构(图)
D1档时,C2 和F1工作:(固定后行星架) 输入轴—前齿圈—太阳轮组件—后齿圈—输出轴; D2档时,C2和B1工作:(固定前太阳轮) 输入轴—前齿圈—前行星架—输出轴; D3档时,C1和C2工作: 输入轴—太阳轮—前齿圈—行星架—输出轴 R档,C1和B2工作:(固定后行星架) 输入轴—太阳轮—后齿圈—输出轴;
功用: 连接,即将输入轴和行星排的某一元件连接,或将行 星排某两元件连接成一整体;
组成:离合器鼓、活塞、回位弹簧、钢片、摩擦片、密封 圈等组成。
工作原理:当油液进入离合器推动活塞移动,使钢片和 摩擦片接合,产生摩擦力。因此动力的传递由离合器输 入轴—离合器鼓—钢片—摩擦片—离合器输出轴;这样 离合器输入轴连接元件和输出轴连接元件接合为一整体; 同理当油液退出离合器,活塞在回位弹簧作用下回位, 使钢片和摩擦片存在一定间隙,输入轴和输出轴分离; 钢片与摩擦片之间自由间隙一般为0.5-2.0mm(图)