广西大学自动控制原理习题答案(本科)第6章
自动控制原理 课后习题答案(2020年7月整理).pdf

第1章控制系统概述【课后自测】1-1 试列举几个日常生活中的开环控制和闭环控制系统,说明它们的工作原理并比较开环控制和闭环控制的优缺点。
解:开环控制——半自动、全自动洗衣机的洗衣过程。
工作原理:被控制量为衣服的干净度。
洗衣人先观察衣服的脏污程度,根据自己的经验,设定洗涤、漂洗时间,洗衣机按照设定程序完成洗涤漂洗任务。
系统输出量(即衣服的干净度)的信息没有通过任何装置反馈到输入端,对系统的控制不起作用,因此为开环控制。
闭环控制——卫生间蓄水箱的蓄水量控制系统和空调、冰箱的温度控制系统。
工作原理:以卫生间蓄水箱蓄水量控制为例,系统的被控制量(输出量)为蓄水箱水位(反应蓄水量)。
水位由浮子测量,并通过杠杆作用于供水阀门(即反馈至输入端),控制供水量,形成闭环控制。
当水位达到蓄水量上限高度时,阀门全关(按要求事先设计好杠杆比例),系统处于平衡状态。
一旦用水,水位降低,浮子随之下沉,通过杠杆打开供水阀门,下沉越深,阀门开度越大,供水量越大,直到水位升至蓄水量上限高度,阀门全关,系统再次处于平衡状态。
开环控制和闭环控制的优缺点如下表1-2 自动控制系统通常有哪些环节组成?各个环节分别的作用是什么?解:自动控制系统包括被控对象、给定元件、检测反馈元件、比较元件、放大元件和执行元件。
各个基本单元的功能如下:(1)被控对象—又称受控对象或对象,指在控制过程中受到操纵控制的机器设备或过程。
(2)给定元件—可以设置系统控制指令的装置,可用于给出与期望输出量相对应的系统输入量。
(3)检测反馈元件—测量被控量的实际值并将其转换为与输入信号同类的物理量,再反馈到系统输入端作比较,一般为各类传感器。
(4)比较元件—把测量元件检测的被控量实际值与给定元件给出的给定值进行比较,分析计算并产生反应两者差值的偏差信号。
常用的比较元件有差动放大器、机械差动装置和电桥等。
(5)放大元件—当比较元件产生的偏差信号比较微弱不足以驱动执行元件动作时,可通过放大元件将微弱信号作线性放大。
自动控制原理第6章习题解——邵世凡

习 题 66-1 设控制系统的开环传递函数为:()()()s s s s G 1.015.0110++= 绘出系统的Bode 图并求出相角裕量和幅值裕量。
若采用传递函数为(1+0.23s)/(1+0.023s)的串联校正装置,试求校正后系统的幅值和相角裕度,并讨论校正后系统的性能有何改进。
6—2设控制系统的开环频率特性为()()()()ωωωωωj j j j H j G 25.01625.011++= ①绘出系统的Bode 图,并确定系统的相角裕度和幅值裕度以及系统的稳定性; ②如引入传递函数()()()0125.025.005.0++=s s s G c 的相位滞后校正装置,试绘出校正后系统的Bode 图,并确定校正后系统的相角裕度和幅值裕度。
6 3设单位反馈系统的开环传递函数为()()()8210++=s s s s G 设计一校正装置,使静态速度误差系数K v =80,并使闭环主导极点位于s=-2±j23。
6-4设单位反馈系统的开环传递函数为()()()93++=s s s K s G ①如果要求系统在单位阶跃输入作用下的超凋量σ =20%,试确定K 值;②根据所确定的K 值,求出系统在单位阶跃输入下的调节时间t s 。
,以及静态速度误差系数; ③设计一串联校正装置,使系统K v ≥20,σ≤25%,t s 减少两倍以上。
6 5 已知单位反馈系统开环传递函数为()()()12.011.0++=s s s K s G 设计校正网络,使K v ≥30,γ≥40º,ωn ≥2.5,K g ≥8dB 。
6-6 由实验测得单位反馈二阶系统的单位阶跃响应如图6-38所示.要求①绘制系统的方框图,并标出参数值;②系统单位阶跃响应的超调量σ =20%,峰值时间t p =0.5s ,设计适当的校正环节并画出校正后系统的方框图。
6-7设原系统的开环传递函数为()()()15.012.010++=s s s s G 要求校正后系统的相角裕度γ=65º。
自动控制原理第六章课后习题答案(完整)

自动控制原理第六章课后习题答案(免费)线性定常系统的综合6-1 已知系统状态方程为:()100102301010100x x u y x•-⎛⎫⎛⎫ ⎪ ⎪=--+ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭= 试设计一状态反馈阵使闭环系统极点配置为-1,-2,-3.解: 由()100102301010100x x u y x•-⎛⎫⎛⎫ ⎪ ⎪=--+ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭=可得:(1) 加入状态反馈阵()012K k k k =,闭环系统特征多项式为:32002012()det[()](2)(1)(2322)f I A bK k k k k k k λλλλλ=--=++++-+--+-(2) 根据给定的极点值,得期望特征多项式:*32()(1)(2)(3)6116f λλλλλλλ=+++=+++(3) 比较()f λ与*()f λ各对应项系数,可得:0124,0,8;k k k ===即:()408K =6-2 有系统:()2100111,0x x u y x•-⎛⎫⎛⎫=+ ⎪ ⎪-⎝⎭⎝⎭= (1) 画出模拟结构图。
(2) 若动态性能不能满足要求,可否任意配置极点? (3) 若指定极点为-3,-3,求状态反馈阵。
解(1) 模拟结构图如下:(2) 判断系统的能控性;0111c U ⎡⎤=⎢⎥-⎣⎦满秩,系统完全能控,可以任意配置极点。
(3)加入状态反馈阵01(,)K k k =,闭环系统特征多项式为:()2101()det[()](3)22f I A bK k k k λλλλ=--=+++++ 根据给定的极点值,得期望特征多项式:*2()(3)(3)69f λλλλλ=++=++比较()f λ与*()f λ各对应项系数,可解得:011,3k k ==即:[1,3]K =6-3 设系统的传递函数为:(1)(2)(1)(2)(3)s s s s s -++-+试问可否用状态反馈将其传递函数变成:1(2)(3)s s s -++若能,试求状态反馈阵,并画出系统结构图。
广西大学自动控制原理习题答案(本科)第6章
习题参考答案6-1 已知线性系统的微分方程如下,试用等倾线法绘制其相轨迹。
(1)023=++x x x (2)02=++x x x (3)02=+x x (4)02=-+x x x (5)13=+x x (6)1=x6-2 已知二阶非线性系统的微分方程如下,求其奇点并确定奇点类型。
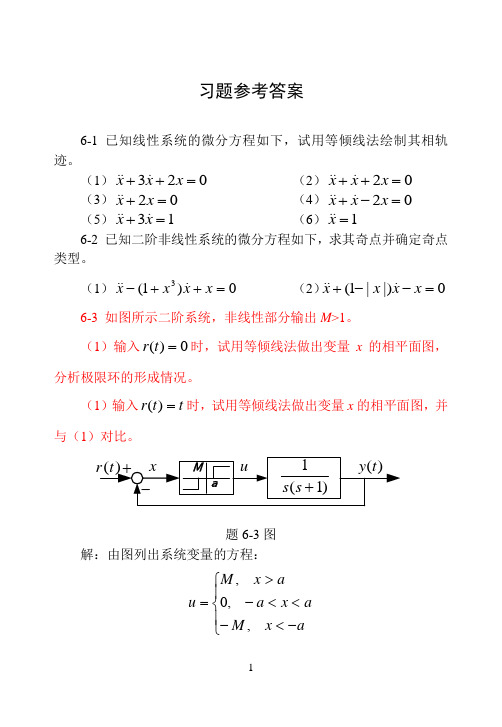
(1)0)1(3=++-x x x x(2)0|)|1(=--+x x x x6-3 如图所示二阶系统,非线性部分输出M >1。
(1)输入0)(=t r 时,试用等倾线法做出变量x 的相平面图,分析极限环的形成情况。
(1)输入t t r =)(时,试用等倾线法做出变量x 的相平面图,并与(1)对比。
题6-3图解:由图列出系统变量的方程:⎪⎩⎪⎨⎧-<-<<->=a x M a x a a x M u ,,0,y r x -=u y y=+ 得到变量x 的方程:⎪⎩⎪⎨⎧-<++<<-+>-+=+a x M rr a x a rr a x M r r x x ,,, (1)0)(=t r 时,变量x 的方程:III ,,II ,,I ,,a x M x xa x a x x a x M x x -<+-=<<--=>--= 在I 区,等倾线方程为xM /1--=α。
当M x -= 时0=α,当0=x时∞=α,当±∞→x 时1-=α,因此相轨迹汇合到水平线M x-= 并趋向无穷远处。
在II 区,等倾线方程为1-=α,即一簇平行线。
在III 区,等倾线方程为xM /1+-=α。
当M x = 时0=α,当0=x时∞=α,当±∞→x 时1-=α,因此相轨迹汇合到水平线M x= 并趋向无穷远处。
当a = 0时,不存在II 区,可形成极限环。
(2)t t r =)(时,变量x 的方程:III ,,1II ,,1I ,,1a x M x xa x a x x a x M x x -<++-=<<-+-=>+--= 在I 区,等倾线方程为xM /)1(1-+-=α。
自动控制原理 孟华 第6章习题答案(含过程)

第六章习题 6-1.解:方法一:原系统的截止频率为44.16rad/s ,相稳定裕度为180°-90°-arctan4.416=12.76°截止频率和相角裕度均不满足要求,需加入串联超前校正,选择校正网络的传递函数为TsaTsKs G c ++=11)(取校正后系统的截止频率s rad c /52=ω,相角裕度︒=50γ。
则Ta c 1=ω,6.2lg 10lg 20=+a K ,︒=+-+︒5011arctan11a a 由上述3式的64.0,01.0,4.4===K T a)101.0)(11.0()104.0(128)()(+++=s s s s s G s G c校正后系统的截止频率为s rad c /53=ω,相角裕度︒=5.49γ,满足要求。
方法二:按二阶系统最佳模型设计,设校正后系统的开环传递函数为)1()(+=Ts s Ks G则闭环系统的传递函数为222222//1/)(nn n s s T K Ts s TK K s Ts K s ωζωωφ++=++=++= 令50=K ,707.0=ζ由T n /12=ζω,T K n /2=ω,得01.0=T 。
即)101.0(50)()(+=s s s G s G c ,101.011.041)(++=s s s G c 。
易验证该校正环节满足要求。
6-2.解:本题可首先检验系统得性能指标,针对系统在性能上的缺陷并结合校正网络的作用,选用合适的校正网络,再按相应的步骤确定校正网络的参数。
(1) 根据稳定误差要求,确定系统的K 值。
K s s Ks s G s s K s s v 100)14.0(100lim )(lim lim 0=+⋅==→→%110011≤==KK e ss 求得1≥K 。
(2) 利用已确定的K ,计算未校正系统的相角裕度。
取1=K ,则 )14.0(100)(+=s s s G c其渐近对数幅频特性可表示为⎪⎩⎪⎨⎧><=)25(04.0100lg20)25(100lg 20)(2ωωωωωL由0)(='ωL 求得 s rad 50='ω此时系统的相角裕度为︒<︒='-︒-︒='456.26)04.0arctan(90180cωγ 显然,系统在稳态误差满足指标要求的情况下,相角裕度不满足要求。
自动控制原理 课后习题答案

【课后自测】1-1 试列举几个日常生活中的开环控制和闭环控制系统,说明它们的工作原理并比较开环控制和闭环控制的优缺点。
解:开环控制——半自动、全自动洗衣机的洗衣过程。
工作原理:被控制量为衣服的干净度。
洗衣人先观察衣服的脏污程度,根据自己的经验,设定洗涤、漂洗时间,洗衣机按照设定程序完成洗涤漂洗任务。
系统输出量(即衣服的干净度)的信息没有通过任何装置反馈到输入端,对系统的控制不起作用,因此为开环控制。
闭环控制——卫生间蓄水箱的蓄水量控制系统和空调、冰箱的温度控制系统。
工作原理:以卫生间蓄水箱蓄水量控制为例,系统的被控制量(输出量)为蓄水箱水位(反应蓄水量)。
水位由浮子测量,并通过杠杆作用于供水阀门(即反馈至输入端),控制供水量,形成闭环控制。
当水位达到蓄水量上限高度时,阀门全关(按要求事先设计好杠杆比例),系统处于平衡状态。
一旦用水,水位降低,浮子随之下沉,通过杠杆打开供水阀门,下沉越深,阀门开度越大,供水量越大,直到水位升至蓄水量上限高度,阀门全关,系统再次处于平衡状态。
开环控制和闭环控制的优缺点如下表1-2 自动控制系统通常有哪些环节组成?各个环节分别的作用是什么?解:自动控制系统包括被控对象、给定元件、检测反馈元件、比较元件、放大元件和执行元件。
各个基本单元的功能如下:(1)被控对象—又称受控对象或对象,指在控制过程中受到操纵控制的机器设备或过程。
(2)给定元件—可以设置系统控制指令的装置,可用于给出与期望输出量相对应的系统输入量。
(3)检测反馈元件—测量被控量的实际值并将其转换为与输入信号同类的物理量,再反馈到系统输入端作比较,一般为各类传感器。
(4)比较元件—把测量元件检测的被控量实际值与给定元件给出的给定值进行比较,分析计算并产生反应两者差值的偏差信号。
常用的比较元件有差动放大器、机械差动装置和电桥等。
(5)放大元件—当比较元件产生的偏差信号比较微弱不足以驱动执行元件动作时,可通过放大元件将微弱信号作线性放大。
自动控制原理 题库习题参考答案

2-1 2-2 2-3 2-4 2-5(a )01201()i mxf f x f x ++= (b )1212001()i k k k k xx k xf++= (c )01201()i i f xk k x f x k x ++=+ 2-6列写两质量块的微分方程有12()()()()()w w s w w w w s w m yf y y k y y k r y m yf y y k y y =-+-+-=-+-消去中间变量得1212122()()s s w w s w w s w m m y f m m y k m k m k m yfk y k k y fk r k k r +++++++=+ 2-7系统在下平衡位置附近有221121222212()()ml ka mg lF ml ka mg θθθθθθθθ=---+=---消去中间变量得()()()2422222222212m l ka mg ml ka mg m g ka lF θθθ+++++= 2-8电网络的输入输出微分方程为112201122110011221122()()i i i RC R C u RC R C RC u u RC R C u RC R C u u ++++=+++机械系统的输入输出微分方程为120221112012012112212()()i i i f f x f k f k f k x k k x f f xf k f k x k k x ++++=+++ 2-92-102-11 00(sin )d e E αα∆=-∆ 2-12(a )假定B 孔封闭,A 孔打开,水泵流量1q ,流过截流孔A 、C 的流量A q 、C q 间满足11122A A C dh q q A dtdhq q A dt -=-=将A q 和C q 表示成液位差的函数有11122dh q A dtdh A dt-== 静态工作点的增量间满足11112122dh q h A dt dh A dt -==消去中间变量1h 有(221214222dh R A A RA RA h dt++= (b )假定A 孔封闭,B 孔打开,水泵流量1q ,流过截流孔B 、C 的流量B q 、C q 间满足11122B BC dh q q A dtdh q q A dt -=-= 将A q 和C q 表示成液位差的函数有11122dh q A dtdh A dt-== 静态工作点的增量间满足))1112121222dh q h h A dt dh h h A dt -=-=消去中间变量1h 有(2212142222dh R A A RA RA RA h dt +=2-13给流量s q 一扰动,记s s s q q q=+ 、os os os t t t =+ 、w w w t t t =+ ,则有 1()()()1()()os ss s vs is os os os os w w w w w vw iw w w os os w w dt C q qc t t t t t t t dt Rdt C q c t t t t t t t dt R =+---+--=--++--将静态工作点满足条件代入得1()()1()os ss vs os s vs is os os os w w w w vw w os w dt C q c t qc t t t t t dt Rdt C q c t t t dt R =-+----=-+-略去二阶增量s os qt ,有 1()()11os s s vs os vs is os s os w w w w vw w os dt C q c t c t t q t t dt Rdt C q c t t dt R R =-+---⎛⎫=-++⎪⎝⎭消去中间变量os t得到 ()()()2211()w w s w s w vw w s vs s w vs vw s vs w vw w w vs is os s d t dtRC C C Rq c C Rq c Rq q c c q c q c t dt dtc t t q+++++++⎡⎤⎣⎦=-同理,给is t 一扰动,记is is is t t t=+ 、os os os t t t =+ 、w w w t t t =+ ,则有 1()()1()()os ss vs is is os os os os w w w w w vw iw w w os os w w dt C q c t t t t t t t t dt Rdt C q c t t t t t t t dt R =+---+--=--++--将静态工作点满足条件代入得1()()1()os s s vs is os os w w w w vw w os w dt C q c t t t t dt Rdt C q c t t t dt R=---=-+-消去中间变量os t得到 ()()()2211w w s w s s vs w w vw s w vs vw s vs w vw ws vs is d t dtRC C C Rq c C Rq c Rq q c c q c q c t dt dtq c t+++++++⎡⎤⎣⎦= 2-14()()2()()()m f m a m a a a m e f f C s U s J L s J R fL s fR C C L s R -Ω=+++++ 2-15传递函数为()73(s)=()(1)(3)C s s G R s s s +=++ 单位脉冲响为329tte e ---+。
自动控制原理课后答案第6章

图 6-1 串联校正
为了减少校正装置的输出功率,降低系统功率损耗和成本,串联校正装置一般装设在前 向通道综合放大器之前,误差测量点之后的位置。串联校正的特点是结构简单,易于实现, 但需附加放大器,且对于系统参数变化比较敏感。 串联校正按照校正装置的特点分为超前校正、滞后校正和滞后-超前校正。校正后系统开 环传递函数为
6.1.2
常用的校正方法
在线性控制系统中,常用的校正设计方法有分析法和综合法两类。分析法又称试探法。 用分析法设计校正装置比较直观,在物理上易于实现,但设计过程带有试探性,要求设计者 有一定的工程经验。综合法又称为期望频率特性法。这种设计方法物理意义明确,但校正装 置传递函数可能较为复杂,在物理上不易于实现。 按照校正装置在系统中的位置,以及它和系统固有部分的联结方式不同,通常可分为串 联校正、反馈校正和复合校正等。 1.串联校正 串联校正是指校正装置 Gc(s)接在系统的前向通道中,与固有部分 Go(s)成串联连接的方 式,如图 6-1 所示。
5
a) 增加低频增益
b) 改善中频段斜率 图 6-4 校正前后对数幅频特性
c) 兼有两种补偿
以上三种情况需要不同的校正装置来实现。总之,校正后的控制系统应具有足够的稳定 裕量,满意的动态响应和稳态精度。但是。当难以使系统所有指标均达到较高的要求时,则 只能根据不同类型系统的要求,有侧重地解决。
6.2
1. 校正装置 控制系统的校正装置可以是电气的、机械的或其它性质的物理元部件。常用的电气校正 装置分为有源和无源两种。 常见的无源校正装置有 RC 双端口电路网络、微分变压器等。这种校正网络原理、线路 简单,容易理解,且无需外加直流电源;但其缺点是本身没有增益,负载效应明显,因此, 在接入系统时为消除负载效应,一般需增设隔离放大器。有源校正装置是以运算放大器为核 心元件的有源电路网络。由于运算放大器本身具有高输入阻抗和低输出阻抗的特点及较强的 带负载能力,接入系统时不需外加隔离放大器,而且这种校正网络调节使用方便,因此被广 泛应用于工程实际中。 2. 校正目标 频域法校正主要是改善系统的开环对数幅频特性曲线形状,其目标就是通过增设适当的 校正环节,使校正后系统开环对数幅频特性曲线的三个频段都能满足要求。即: (1) 低频段要有一定的高度和斜率,以满足稳态精度的要求,因此校正后的系统应该是 Ⅰ型或Ⅱ型系统。 (2) 中频段的截止频率 ωc 要足够大,以满足动态快速性的要求;中频段的斜率要求为 -20dB/edc,并有足够的宽度,即 H = 4~20,以满足相对稳定性的要求。 (3) 高频段要有较大的负斜率,一般应≤-40dB/edc,以满足抑制高频噪声的要求。 这样,从系统开环对数幅频特性曲线来看,需要进行校正的情况通常可分为如下三种基 本类型。 (1) 如果一个系统是稳定的,而且有满意的动态性能,但稳态误差过大时,必须增加低 频段增益以减小稳态误差,如图 6-4 a 中虚线所示,同时尽可能保持中频段和高频段不变。 (2) 如果一个系统是稳定的,且具有满意的稳态精度,但其动态响应较差时,则应改变 特性的中频段和高频段,如图 6-4 b 中虚线所示,以改变截止频率和相位裕量。 (3) 如果一个系统无论其稳态还是动态响应都不满意,就是说整个特性都需要加以改 善,则必须通过增加低频增益并改变中频段和高频段的特性,如图 6-4 c 中虚线所示,这样系 统就可以满足稳态和动态性能指标的要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
习题参考答案6-1 已知线性系统的微分方程如下,试用等倾线法绘制其相轨迹。
(1)023=++x x x (2)02=++x x x (3)02=+x x (4)02=-+x x x (5)13=+x x (6)1=x6-2 已知二阶非线性系统的微分方程如下,求其奇点并确定奇点类型。
(1)0)1(3=++-x x x x(2)0|)|1(=--+x x x x6-3 如图所示二阶系统,非线性部分输出M >1。
(1)输入0)(=t r 时,试用等倾线法做出变量x 的相平面图,分析极限环的形成情况。
(1)输入t t r =)(时,试用等倾线法做出变量x 的相平面图,并与(1)对比。
题6-3图解:由图列出系统变量的方程:⎪⎩⎪⎨⎧-<-<<->=a x M a x a a x M u ,,0,y r x -=u y y=+ 得到变量x 的方程:⎪⎩⎪⎨⎧-<++<<-+>-+=+a x M rr a x a rr a x M r r x x ,,, (1)0)(=t r 时,变量x 的方程:III ,,II ,,I ,,a x M x xa x a x x a x M x x -<+-=<<--=>--= 在I 区,等倾线方程为xM /1--=α。
当M x -= 时0=α,当0=x时∞=α,当±∞→x 时1-=α,因此相轨迹汇合到水平线M x-= 并趋向无穷远处。
在II 区,等倾线方程为1-=α,即一簇平行线。
在III 区,等倾线方程为xM /1+-=α。
当M x = 时0=α,当0=x时∞=α,当±∞→x 时1-=α,因此相轨迹汇合到水平线M x= 并趋向无穷远处。
当a = 0时,不存在II 区,可形成极限环。
(2)t t r =)(时,变量x 的方程:III ,,1II ,,1I ,,1a x M x xa x a x x a x M x x -<++-=<<-+-=>+--= 在I 区,等倾线方程为xM /)1(1-+-=α。
当M x -=1 时0=α,当0=x时∞=α,当±∞→x 时1-=α,因此相轨迹汇合到水平线M x-=1 并趋向无穷远处。
在II 区,等倾线方程为x/11+-=α。
当1=x 时0=α,当0=x时∞=α,当±∞→x 时1-=α,因此相轨迹汇合到水平线1=x并趋向无穷远处。
在III 区,等倾线方程为xM /)1(1++-=α。
当M x +=1 时0=α,当0=x时∞=α,当±∞→x 时1-=α,因此相轨迹汇合到水平线M x+=1 并趋向无穷远处。
可见相轨迹形成一个稳定的极限环。
x(1)(2)6-4 如图所示二阶系统,非线性部分k>1,输入0)(=t r 。
试用等倾线法做出变量x 的相平面图,分析极限环的形成情况。
题6-4图解:由图列出系统变量的方程:y Ts x )1(--=,u s s y )1(1+=即u ss Tsx +--=21。
再由 ⎪⎩⎪⎨⎧-<-<<->=a x ka a x a kx a x ka u ,,,得到变量x 的微分方程:III,,II ,,I ,,a x ka x x a x a kT kx x x a x ka x x -<+-=<<----=>--= 在I 区,等倾线方程为xka /1--=α。
当ka x -= 时0=α,当0=x时∞=α,当±∞→x 时1-=α,因此相轨迹汇合到水平线ka x-= 并趋向无穷远处。
在III 区,等倾线方程为xka /1+-=α。
当ka x = 时0=α,当0=x时∞=α,当±∞→x 时1-=α,因此相轨迹汇合到水平线ka x= 并趋向无穷远处。
在II 区,作变量替换T x z +=,系统方程变为0=++kz z z。
奇点z =0(x =-T )是稳定的焦点。
x当T <a 时,I 区和III 区的相轨迹进入II 区,最后收敛到奇点x =-T ,此时系统稳定。
当T >a 时,I 区和III 区的相轨迹进入II 区,但是II 区的奇点x=-T 在I 区,因此相轨迹将在I 区和II 区循环,形成极限环。
6-5 如图所示非线性系统中,继电特性输出幅值M =4.7。
(1)如果继电器特性的a =0,求系统的自持振荡周期和振幅。
(2)a 为何值时,系统无自持振荡?题6-5图解: 设正弦输入信号的幅值为A 。
死区继电器特性描述函数为:)()(14)(2a A AaA M A N ≥-=π其负倒描述函数为实数。
系统频率特性)()(1)()()()(i ωP A N i ωP A N i ωR i ωY +=,产生自持振荡的条件是0)()(1=+ωi P A N ,即)(/1)(A N i P -=ω。
因此分析系统自持振荡就是确定)(ωi P 和)(/1A N -的交点。
线性部分的频率特性为)321(1)12)(1(1)(2ωωωωωωωi i i i i i P +-=++=画出其Nyquist 图。
当0212=-ω,即2/2=ω时,)(ωi P 与实轴相交,交点为3/2)2/2(-=i P 。
(1)a =0时,当A 从+∞→0变化时,)(/1A N -从-∞→0。
2/2=ω时,)(ωi P 与)(/1A N -相交,交点为实轴的-2/3,即234)(==A M A N π,得到0.414.337.442=⨯⨯⨯=A 。
因此自持振荡周期89.822/2===πωπT ,振幅0.4=A 。
(2)a >0时,当A 从+∞→0变化时,)(/1A N -从-∞→∞-,其中a A 2=时达到最大值Ma2π-。
如果322-<-M aπ,则)(ωi P 和)(/1A N -不相交。
因此0.234=>πMa 时,系统无自持振荡。
6-6已知非线性系统结构图如图所示,其中M =h =1,)3()(1+=s s K s G ,15)(2+=s s G 。
当K 取何值时,系统会产生自振?题6-6图解:输入为正弦信号时,非线性元件的描述函数与频率无关,可以看作常数。
由梅森公式写出闭环系统的传递函数为)()()()(1)()()(2111s G s G A N s G s G s R s Y ++= 闭环系统特征方程为0)()()()(1211=++s G s G A N s G ,即)(1)(1)()(121A N s G s G s G -=+由Nyquist 判据可知,当)(1)()()(121s G s G s G s G +=在右半s 平面没有零极点时,要使系统稳定,要求)(ωi G 曲线与)(1A N -不相交。
两位置滞环继电器特性的描述函数222224144)(14)(A iA A A Mh i A h A M A N ππππ--=--=负倒描述函数为414)(12ππiA A N ---=-再由K s K s s Ks s K s s s K s G s G s G s G ++++=+++⋅+=+=)3(45)3(115)3()(1)()()(23121将s i ω=代入得到325()[(3)](4)KG j i K K ωωωω=+-+- 作出s 平面图如下。
下面计算()G i ω曲线与虚轴的交点。
令()G i ω实部为0,即042=-ωK,得到2/K =ω。
此时()4(3)123G j i iK K K ω==-=-+-+就是()G i ω曲线与虚轴的交点。
当0=K 时,交点为0;当+∞=K 时,交点也为0。
因此当K 由+∞→0变化时,交点由0向虚轴负无穷方向移动,达到最大值后又向0移动。
当交点位于虚轴)0,4(π-时,()G i ω曲线与)(1A N -不相交,系统稳定。
临界的K 值满足431240π=+K K即0121603=+-ππK K0498.16=+-K K解得250.1698.1624420.28898.16±=⨯-±=K即20.2801=K ,058.02=K根据前面分析,当20.280058.0<<K 时,系统产生自振,频率2/K =ω。
6-7已知非线性系统结构图如图所示,)3()(1+=s s Ks G ,15)(2+=s s G 。
当K 取何值时,系统会产生自振?题6-7图解:前面已经得到325()[(3)](4)KG i i K K ωωωω=+-+-饱和非线性特性的描述函数为⎥⎦⎤⎢⎣⎡-+=2)(1arcsin 2)(A a A a A a k A N π 当A =a 时取最小值k ,作出G (i ω)平面图如下。
下面计算()G i ω曲线与负实轴的交点。
令()G i ω虚部为0,即0)3(3=-+ωωK ,得到K +=3ω。
此时55()4(3)123K KG i K K Kω==--++当0=K 时,交点为0;当+∞=K 时,交点为-5/3。
因此当K 由+∞→0变化时,交点由0向-5/3移动。
当交点位于实轴)0,1(-时,()G i ω曲线与)(1A N -不相交。
临界点的K 值满足13125-=+-KK解出K =6。
根据前面分析,当K>6时,系统产生自振。
6-8 已知非线性速度反馈系统如图所示。
利用MA TLAB 的辅助,求系统单位阶跃响应的解析表达式。
题6-8图解:系统的闭环传递函数为⎪⎪⎩⎪⎪⎨⎧>++≤++=5.0)(,1215.0)(,11)()(22t y s s t y s s s R s Y (1)当5.0)(≤t y 时,系统为欠阻尼系统(1,5.0==n ωζ),单位阶跃响应为20.5()1)arccos ]1 1.15sin[0.75/3]n tn t y t t e t ζωζωζπ--=-+=-+借助MATLAB 可知当t =1.294时5.0)(=t y 。
此时 0.50.5()0.575sin[0.75/3]0.863cos[0.75/3]0.467t t dy t e t e t dtππ--=+-+= (2)当5.0)(>t y ,即t >t 0=1.294时,系统微分方程为u y y y=++ 2 作拉普拉斯变换得到)()()(2)(2)()()(0002s U s Y t y s sY t yt sy s Y s =+-+-- 12)()1(967.015.012)(12467.15.012)(121467.05.012)(12)(2)()()(22222222000++++++=++++++=+++++++=+++++++=s s s U s s s s s U s s s s s s U s s s s s s U s s t y t y t sy s Y得到系统响应)294.1()294.1()294.1()294.1(1)457.0033.0(1)294.11(1)294.1(967.05.0)]([)(---------+-=-+-+-+==t t t t e t e t e t e s Y L t y 总之,系统单位阶跃响应为⎪⎩⎪⎨⎧>+-≤+-=---294.1,)457.0033.0(1294.1],3/75.0sin[15.11)()294.1(5.0t et t t e t y t t π。