MSP430定时器A说明
msp430定时器a中文超级详解 (1)

文章转载自网络-----------------感谢原作者的辛勤奉献MSP430的定时器中有比较捕获比较模式:这是定时器的默认模式,当在比较模式下的时候,与捕获模式相关的硬件停止工作,如果这个时候开启定时器中断,然后设置定时器终值(将终值写入TACCRx),开启定时器,当TAR的值增到TACCRx的时候,中断标志位CCIFGx 置一,同时产生中断。
若中断允许未开启则只将中断标志位CCIFGx置一。
例子:比较模式就像51单片机一样,要能够软件设置定时间隔来产生中断处理一些事情,如键盘扫描,也可以结合信号输出产生时序脉冲发生器,PWM信号发生器。
如:不断装载TACCRx,启动定时器,TAR和TACCRx比较产生中断处理。
捕获模式:利用外部信号的上升沿、下降沿或上升下降沿触发来测量外部或内部事件,也可以由软件停止。
捕获源可以由CCISx选择CCIxA,CCIxB,GND,VCC。
完成捕获后相应的捕获标志位CCIFGx置一捕获模式的应用:利用捕获源的来触发捕获TAR的值,并将每次捕获的值都保存到TACCRx 中,可以随时读取TACCRx的值,TACCRx是个16位的寄存器,捕获模式用于事件的精确定位。
如测量时间、频率、速度等例子:利用两次捕获的值来测量脉冲的宽度。
或捕获选择任意沿,CCISx=”11“(输入选择VCC),这样即当VCC与GND发生切换时产生捕获条件结合利用:异步通讯同时应用比较模式和捕获模式来实现UART异步通信。
即利用定时器的比较模式来模拟通讯时序的波特率来发送数据,同时采用捕获模式来接收数据,并及时转换比较模式来选定调整通信的接受波特率,达到几首一个字节的目的----------------------------------------利用MSP430单片机定时器A和捕获/比较功能模块结合使用,实现脉冲宽度的测量。
本例程用到了定时器A的CCI1A端口(例如MSP430F14X的P1.2引脚)作捕获外部输入的脉冲电平跳变,同时结合简单的软件算法就能实现脉冲宽度的测量。
msp430定时器部分

case 4:break;
case 10:P1OUT^=BIT0;break;
}
}
ห้องสมุดไป่ตู้
输出模式4主要是翻转:在TAR=CCRX的时候发生翻转。
输出模式主要是复位:在TAR=CCRX时发生复位,只有其他模式到来的时候才能变换。
输出模式6主要是PWM翻转和置位:在TAR=CCR0的时候,发生PWM翻转,在TAR=CCR0的时候,发生置位。
输出模式7主要是PWM复位和置位:在TAR=CCRX的时候,发生PWM复位,在TAR=CCR0的时候,发生复位。
void main()
{
WDTCTL=WDTPW+WDTHOLD;
P6DIR|=BIT0;
CCTL0=CCIE;
CCR0=20000;
TACTL=TASSEL_2+MC_2;
_BIS_SR(GIE);
while(1);
例如:增计数模式下,使用定时器中断使接口发生翻转:
#include<msp430f149.h>
void main()
{
WDTCTL=WDTPW+WDTHOLD;
P6DIR|=BIT0;
CCTL0=CCIE;
CCR0=20000-1;
TACTL=TASSEL_2+MC_1;
定时器的工作模式:
定时器的工作模式位由寄存器TACTL中的MC1和MC0两位控制。
1.停止模式:
定时器暂停计数,就是说当暂停结束后,重新开始计数的时候,计数的开始位是从暂停时候的数开始的。如果想重新计数就得对TACTL控制寄存器中的CLR位置位。
Msp430定时器的介绍及其基本应用

Msp430定时器的介绍及其基本应用Msp430定时器的介绍及其基本应用Msp430单片机一共有5种类型的定时器。
看门狗定时器(WDT)、基本定时器(Basic Timer1)、8位定时器/计数器(8-bit Timer/Counter)、定时器A(Timer_A)和定时器B(Timer_B)。
但是这些模块不是所有msp430型号都具有的功能。
1、看门狗定时器(WDT)学过电子的人可能都知道,看门狗的主要功能就是当程序发生故障时能使受控系统重新启动。
msp430中它是一个16位的定时器,有看门狗和定时器两种模式。
2、基本定时器(Basic Timer1)基本定时器是msp430x3xx和msp430F4xx系列器件中的模块,通常向其他外围提供低频控制信号。
它可以只两个8位定时器,也可以是一个16位定时器。
3、8位定时器/计数器(8-bit Timer/Counter)如其名字所示,它是8位的定时器,主要应用在支持串行通信或数据交换,脉冲计数或累加以及定时器使用。
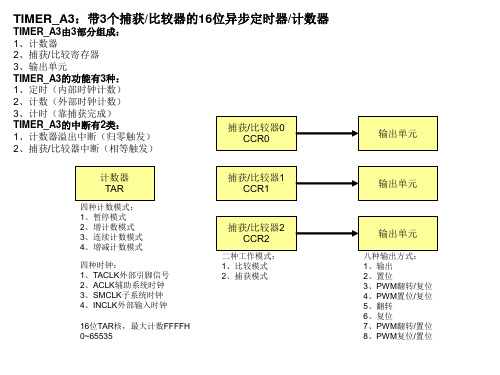
4、16位定时器A和B定时器A在所有msp430系列单片机中都有,而定时器B在msp430f13x/14x和msp430f43x/44x等器件中出现,基本的结构和定时器A是相同的,由于本人最先熟悉并应用的是定时器A所以在这里就主要谈一下自己对定时器A的了解和应用。
定时器A是16位定时器,有4种工作模式,时钟源可选,一般都会有3个可配置输入端的比较/捕获寄存器,并且有8种输出模式。
通过8种输出模式很容易实现PWM波。
定时器A的硬件电路大致可分为2类功能模块:一:计数器TAR计数器TAR是主体,它是一个开启和关闭的定时器,如果开启它就是一直在循环计数,只会有一个溢出中断,也就是当计数由0xffff到0时会产生一个中断TAIFG。
二:比较/捕获寄存器CCRX如何实现定时功能呢?这就要靠三个比较/捕获寄存器了(以后用CCRx表示)。
当计数器TAR的计数值等于CCRx时(这就是捕获/比较中的比较的意思:比较TAR是否等于CCRx),CCRx单元会产生一个中断。
MSP430 定时器A

上次Cloud和大家一起学习完了MSP430的时钟配置,这一篇,我们来学习MSP430单片机的TimerA (定时/计数器A)。
MSP430单片机的TimerA具有非常强大的功能,相关的寄存器配置也相当复杂,Cloud花了好久才逐步理清学习思路,尤其是学习数据手册的相关描述。
在这里Cloud提醒大家,虽然现在网上有中文汉化版的数据手册,但Cloud阅读英文原版后对比发现还是英文原版对器件特性描述得更加清楚,而中文汉化版的省略掉了一些内容。
好吧,扯远了。
下面进入正题:一、MSP430的Timer结构首先让我们通过官方描述来初步了解一下MSP430单片机的Timer资源:定时器A是一个16位的定时/计数器。
定时器A支持多重捕获/比较,PWM输出和内部定时。
定时器还有扩展中断功能,中断可以由定时器溢出产生或由捕获/比较寄存器产生。
定时器A的特性包括:??·四种运行模式的异步16位定时/计数器??·可选择配置的时钟源??·可配置的PWM输出??·异步输入和输出锁存??·对所有TA中断快速响应的中断向量寄存器MSP430G2553单片机共有两个TimerA,分别是Timer0A和Timer1A。
OK,零零总总说了这么多,大家一定带有很多的疑惑,比如什么叫“捕获/比较”等,这里Cloud 先不作解释,会用才是王道。
我们呢先找来定时器A的结构图给大家初步了解一下定时器A的结构:我们先从上面部分开始解释。
中间红色的是一个16位的TimerA,TAR,这其实就是MSP430单片机内部的一个定时计数器了,类似于51中的TH0和TL0的合体。
既然可以拿来计时,那么肯定可以有时钟信号输入,让我们最左边黄色的框,是一个选择器,由上面的TASSEL来选择TACLK、ACLK、SMCLK、INCLK的其中一种时钟。
上次我们已经学习过ACLK和SMCLK,也知道如何配置这两个时钟了(这也是为什么先学习时钟的原因),另外两个是外部时钟源,其中TACLK可以由P1.0输入。
MSP430_定时器A的使用(含OUTMOD模式详解及运用)
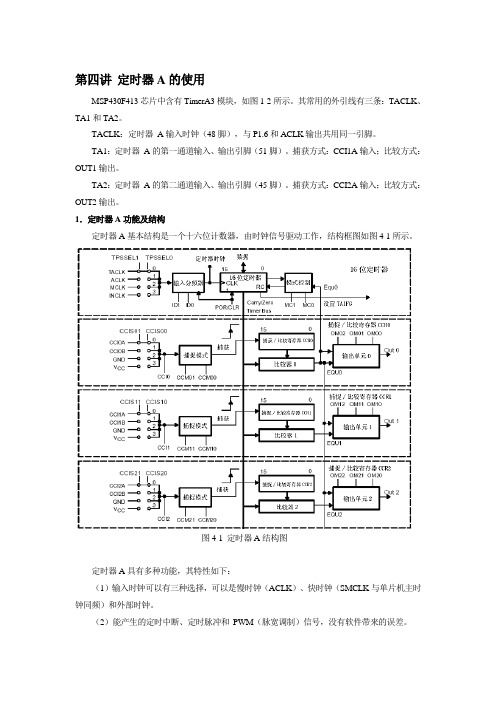
第四讲定时器A的使用MSP430F413芯片中含有TimerA3模块,如图1-2所示。
其常用的外引线有三条:TACLK、TA1和TA2。
TACLK:定时器_A输入时钟(48脚),与P1.6和ACLK输出共用同一引脚。
TA1:定时器_A的第一通道输入、输出引脚(51脚)。
捕获方式:CCI1A输入;比较方式:OUT1输出。
TA2:定时器_A的第二通道输入、输出引脚(45脚)。
捕获方式:CCI2A输入;比较方式:OUT2输出。
1.定时器A功能及结构定时器A基本结构是一个十六位计数器,由时钟信号驱动工作,结构框图如图4-1所示。
图4-1 定时器A结构图定时器A具有多种功能,其特性如下:(1)输入时钟可以有三种选择,可以是慢时钟(ACLK)、快时钟(SMCLK与单片机主时钟同频)和外部时钟。
(2)能产生的定时中断、定时脉冲和PWM(脉宽调制)信号,没有软件带来的误差。
(3)不仅能捕获外部事件发生的时间,还可选择触发脉冲沿(由上升沿或下降沿触发)。
定时器A功能模块主要包括:(1)计数器部分:输入的时钟源具有4种选择,所选定的时钟源又可以1、2、4或8分频作为计数频率,Timer_A可以通过选择4种工作模式灵活的完成定时/计数功能。
(2)捕获/比较器:用于捕获事件发生的时间或产生时间间隔,捕获比较功能的引入主要是为了提高I/O 端口处理事务的能力和速度。
不同的MSP430单片机,Timer_A模块中所含有的捕获/比较器的数量不一样,每个捕获/比较器的结构完全相同,输入和输出都取决于各自所带控制寄存器的控制字,捕获/比较器相互之间完全独立工作。
(3)输出单元:具有可选的8种输出模式,用于产生用户需要的输出信号,支持PWM输出。
2.定时器工作模式(1)停止模式:停止模式用于定时器暂停,并不发生复位,所有寄存器现行的内容在停止模式结束后都可用。
当定时器暂停后重新计数时,计数器将从暂停时的值开始以暂停前的计数方向计数。
个人学习总结:MSP430_TimerA
【8种输出模式】 OUTMOD_0:立即,直接输出OUT位 OUTMOD_1:CCRx置位;CCR0保持(all) OUTMOD_2:CCRx翻转;CCR0复位(all) OUTMOD_3:CCRx置位;CCR0复位 OUTMOD_4:CCRx翻转;CCR0保持(all) OUTMOD_5:CCRx复位;CCR0保持(all) OUTMOD_6:CCRx翻转;CCR0置位 OUTMOD_7:CCRx复位;CCR0置位 输出单元只工作于比较模式,捕获时不会产生输出。 输出单元0不能输出2,3,6,7模式 输出是自动而独立的,和中断使能、中断标志都无关。 产生TA中断的原则:只要计数归零就产生TA中断
SCS
捕获与 定时器同步
SCCI
锁定的 捕获信号
未使用
CAP
捕获/比较 选择位
捕获方式
捕获信号输入源
7.rw-(0) OUTMOD2
6.rw-(0) OUTMOD1 输出模式选择
5.rw-0 OUTMOD0
4.rw-(0)
3.rw-(0)
2.rw-(0)
1.rw-(0)
0.rw-(0)
CCIE
中断使能
ID1
ID0
MC1
MC0
未使用
TACLR
TAIE
TAIFG
选择分频因子
选择计数方式
TAR复位清零 TA中断使能 TA中断标志
【计数时钟源】 TASSEL_0:TACLK外部引脚P1.0/TACLK(12脚)信号 TASSEL_1:ACLK内部辅助时钟 TASSEL_2:SMCLK内部子系统时钟 TASSEL_3:INCLK外部P2.1/TAINCLK(21脚)时钟 【TIMER_A的再次分频】 ID_0:1分频 ID_1:2分频 ID_2:4分频 ID_3:8分频 【计数模式】 MC_0:暂停计数,计数停止,但内容不清零,将继续计数。 MC_1:0~CCR0增计数,到达CCR0后归零,重新计数。先CCR0中断,后TA中断。 MC_2:0~FFFFH连续计数,到达TAR最大值后归零,重新计数。归零时产生TA中断。 MC_3:0~CCR0~0增减计数,到达CCR0后开始减1(产生CCR0中断),减至0时重新 计数,并产生TA中断。 【TACLR置位】 1:TAR清零 2:ID1,ID0复位 3:计数方向为增方向( 比如正由CCR0~0减计数,TACLR后会变为从0~CCR0方向增计数) 产生TA中断的原则: 只要计数归零就产生TA中断
MSP430F149的定时器A操作

MSP430F149的定时器A定时操作1)定时器A的图解图1 定时器A图解2)定时器A的四种计数模式。
1.停止模式。
2.增计数模式。
(产生两个中断标志)也就是当计数到跟TACCR0一样的时候,就返回0,重新计数。
当计数到TACCR0的同时产生一个中断标志CCIFG,而当计数器溢出返回零的同时又同时产生一个中断标志TAIFG。
如图:图2 增计数模式的波形图3.连续计数模式。
(产生一个中断标志)也就是计数器将直接计数到计数器所能计数的最大值0FFFFH之后重新返回零,再次计数。
返回零的同时产生一个TAIFG中断标志。
如图:4.增减计数模式。
(产生两个中断标志)也就是当计数器计数到跟TACCR0一样的之后,然后从TACCR0开始又减少,直到为零,然后又开始增。
当计数跟TACCT0一样的时候产生一个中断标志CCIFG,当减到为零的时候又产生一个中断标志TAIFG。
如图:注意:当重新写入TACCR0数值的时候,当新的数据大于原来的数值的时候,计数器将计数到新的数值才重新返回零;当新的数据小于原来的数值的时候,计数器将直接返回零重新计数。
3)定时器A的寄存器。
1.TACTL●TASSELx:计时器A的时钟来源选择。
●IDx:计时器A时钟的分频选择。
●MCx:计时器A四种计数模式选择。
●TACLR:计数器A的TAR计数清零,同时也可以清楚时钟分频器和计数方向。
●TAIE:TAIFG中断标志使能。
在捕获模式下可以打开所有CCIFG的中断使能。
●TAIFG:中断标志位。
2.TAR计数器的计数寄存器。
3.TACCTLx●CMx:捕获模式选择。
00:关闭;01:上升沿捕获;10:下降沿捕获;11:上升下降沿捕获。
●CCISx:捕获引脚选择。
●SCS:选择捕获电平方式。
0异步时钟;1同步时钟。
●SCCI:锁存同步时钟输入端。
也就是锁存EQUx的值,以供CPU读取。
●CAP:捕获模式和比较模式选择。
0比较;1捕获。
●OUTMODx:输出模式选择。
msp430定时器AD模块以及其他笔记
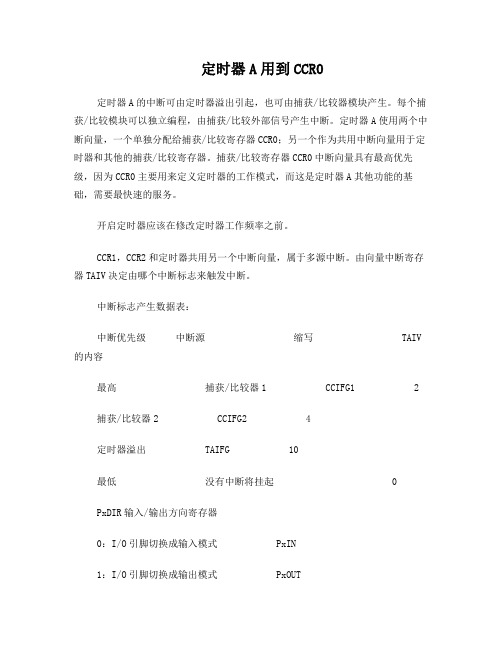
定时器A用到CCR0定时器A的中断可由定时器溢出引起,也可由捕获/比较器模块产生。
每个捕获/比较模块可以独立编程,由捕获/比较外部信号产生中断。
定时器A使用两个中断向量,一个单独分配给捕获/比较寄存器CCR0;另一个作为共用中断向量用于定时器和其他的捕获/比较寄存器。
捕获/比较寄存器CCR0中断向量具有最高优先级,因为CCR0主要用来定义定时器的工作模式,而这是定时器A其他功能的基础,需要最快速的服务。
开启定时器应该在修改定时器工作频率之前。
CCR1,CCR2和定时器共用另一个中断向量,属于多源中断。
由向量中断寄存器TAIV决定由哪个中断标志来触发中断。
中断标志产生数据表:中断优先级中断源缩写 TAIV 的内容最高捕获/比较器1 CCIFG1 2捕获/比较器2 CCIFG2 4定时器溢出 TAIFG 10最低没有中断将挂起 0PxDIR输入/输出方向寄存器0:I/O引脚切换成输入模式 PxIN1:I/O引脚切换成输出模式 PxOUTPxIE中断使能寄存器0:禁止该中断 1:允许该中断PxIES中断触发沿选择寄存器如果允许Px口的某个引脚中断,还需要定义该引脚的中断触发沿。
0:上升沿使相应标志置位 1:下降沿使相应标志置位PxSEL功能选择寄存器0:选择引脚为I/O端口 1:选择引脚为外围模块功能上电复位信号:POR(power-on reset)上电清除复位信号:PUC(power-up clear)POR信号的产生总会产生PUC信号,但是PUC信号的发生不一定会产生POR信号。
脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。
TACTL是最为主要的控制寄存器,它决定了TA的输入时钟信号、TA的工作模式、TA的开启与停止、中断的申请等工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MSP430的定时器A有比较\捕获两种工作模式
比较模式:
这是定时器的默认模式,当在比较模式下的时候,与捕获模式相关的硬件停止工作,如果这个时候开启定时器中断,然后设置定时器终值(将终值写入TACCRx),开启定时器,当TAR的值增到TACCRx的时候,中断标志位CCIFGx置1,同时产生中断。
若中断允许未开启则只将中断标志位CCIFGx置1。
例子:比较模式就像51单片机一样,要能够软件设置定时间隔来产生中断处理一些事情,如键盘扫描,也可以结合信号输出产生时序脉冲发生器,PWM信号发生器。
如:不断装载TACCRx,启动定时器,TAR和TACCRx比较产生中断,输出时序脉冲。
捕获模式:
利用外部信号的上升沿、下降沿或上升下降沿触发来测量外部或内部事件,也可以由软件停止。
捕获源可以由CCISx选择CCIxA,CCIxB,GND,VCC。
完成捕获后相应的捕获标志位CCIFGx置1。
捕获模式的应用:
利用捕获源来触发捕获TAR的值,并将每次捕获的值都保存到TACCRx中,可以随时读取TACCRx的值,TACCRx是个16位的寄存器,捕获模式用于事件的精确定位。
如测量时间、频率、速度等。
利用MSP430单片机定时器A和捕获/比较功能模块结合使用,实现脉冲宽度的测量。
本例程用到了定时器A的CCI1A端口(例如MSP430F14X的P1.2引脚)作捕获外部输入的脉冲电平跳变,同时结合简单的软件算法就能实现脉冲宽度的测量。
在实际应用中可根据例程中的start,end,overflow三个变量来计算脉冲宽度。
此功能模块在实际产品应用中体现出有较高的应用价值。
具体例程
#include <msp430x14x.h>
unsigned int start,end;
unsigned char overflow;
void main (void)
{
WDTCTL = WDTPW+WDTHOLD; //关闭看门狗定时器
P1DIR = BIT0+BIT4; //设置P1.0和P1.4方向为输出
P1SEL = BIT2; //设置P1.2端口为功能模块使用
TACTL = TASSEL0+TACLR+TAIE+MC1; //定时器A时钟信号选择ACLK,同时
//设置定时器A计数模式为连续增计模式
CCTL1 = MC0+SCS+CAP+CCIE; //输入上升沿捕获,CCI0A为捕获信号源_EINT(); //中断允许
while(1); //LOOP
}
#pragma vector=TIMERA1_VECTOR //定时器A中断处理
__interrupt void timer_a(void)
{
switch(TAIV) //向量查询
{
case 2: //捕获中断
if(CCTL1&CM0) //上升沿
{
CCTL1=(CCTL1&(~CM0))|CM1; //更变设置为下降沿触发
start=TAR; //记录初始时间
overflow=0; //溢出计数变量复位
}
else if (CCTL1&CM1) //下降沿
{
CCTL1=(CCTL1&(~CM1))|CM0; //更变设置为上升沿触发
end=TAR; //用start,end,overflow计算脉冲宽度}
break;
case 10: //定时器溢出中断
overflow++;
break; //溢出计数加1
default:break;
}
}
//例程结束
-----------------------------------。