空间飞行器设计-第11讲
第11章 视距传播
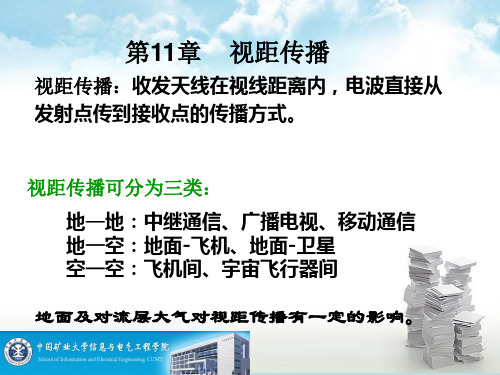
H0.3
GHz
H3.0
||
) / (°
40 50 60 70 80 90
100 80 60 40 20 0
0
10
20
30
0
10
20
30
40
50
60
70
80
90
/ (° )
(a )
海水的反射系数
/ (° )
第11章
视距传播
视距传播:收发天线在视线距离内,电波直接从 发射点传到接收点的传播方式。
视距传播可分为三类:
地—地:中继通信、广播电视、移动通信 地—空:地面-飞机、地面-卫星 空—空:飞机间、宇宙飞行器间 地面及对流层大气对视距传播有一定的影响。
11.1
地面对视距传播的影响
1. 光滑平面地条件下视距传播场强的计算
e j
对于水平极化波
sin ( r j 60 ) cos
2
sin ( r j 60 ) cos
2
(11―1―3a)
对于垂直极化波
V
( r j 60 )sin ( r j 60 ) cos
A H2 C y0 1 B
H1
d
x
A′
地面上的有效反射区
该椭圆(有效反射区)的中心位置C的坐标为
x01 0 d d 2 H1 ( H1 H 2 ) y01 2 d ( H H )2 1 2
长轴在y方向,短轴在x方向。长轴的长度为
(11―1―6)
1 2 2
r AOB 2h sin
空间飞行器的姿态和扰动抑制控制器设计

个 坐标 变换 .
为 了克 服 因为 利 用 四 元 数 描 述 姿 态 带 来 的缺
陷, 并且设 计 一个不 依 赖任何 坐标 变换 的控 制器 , 本 文采 用 R di e 参数 来描 述飞行 器 姿态 , or us g 并且 利 用 B cs pig 制 方 法 和 自适 应 控 制 理 论 和 La- akt pn 控 e yp uo 分 析来 设 计 控 制 器 . nv 由于 Bcs p ig设 计 方 akt pn e
出调节理论的内模方法 , 在外界干扰信号是常数和 有限个正弦信号的组合 的形式的假设条件下 , 进一
步研 究 了飞行 器 的姿态 跟踪 和 干扰抑 制 问题. 而 , 然
We n等…曾指出: 如果用 四元数来描述飞行器 的姿
态方 程 , 使 得该方 程 有 2个 平衡 点 , 会 并且其 中有一 个平 衡点 是 不稳定 的 . 另外 , 献 [ ] 文 8 的结 果依 赖 于
空 间飞行 器 的 姿 态 和扰 动抑 制控 制器 设 计
刘 献 平
( 尔滨工程大 学 理 学院, 哈 黑龙江 哈 尔滨 10 0 ) 50 1
摘
要: 针对存在参数 不确定性和外部干扰 的刚性空 间飞行器 , 采用 R di e 参数描述的飞行器模 型, or u s g 利用 自适 应控制
的频率.
,
缈 =
0
0 l
,
0
a i2
,
0
a i3
,
1
口 ,
f 别 是 已知 的振 幅 和 相位 , 未 知 分 W是
姿 态控 制 和 干 扰 抑 制 问 题 : 虑 系 统 ( )和 考 1 ( ) 在 转动惯 量 矩 阵具有 不 确定性 和形 如 ( ) 干 2, 3的 扰 力矩 存在 的情况 下 , 计 一个 状态反 馈 控制 器 , 设 使 得 对任 意 的初 始状 态 p( )t( ) 闭环 系统 的状 态 0 、oo ,
空间飞行器设计第7讲

射程控制即要使该偏差函数
L(tk)0
当满足时,发出关机指令,结束动力飞行段。
14
制导方式
显式制导——对控制泛函连续测量和比较;计算 量大。
摄动制导——只在关机点前进行测量、计算。又 称小偏差条件下的线性化方法。
火箭实际飞行中会偏离射面或在射面内偏离 预定轨道,故需作横向控制。
H H [ V ( t k )a ( t , k ) t k ] , H [ V ( t k )a ( t ,k ) t k ] ,
3
控制系统功能:
① 控制运载火箭的质心在设计的轨道平面 内按预定的轨道飞行,并根据设计的飞行位 移和飞行速度及时关闭发动机,保证运载火 箭入轨精度;
② 克服种种干扰影响,控制运载火箭绕质 心运动的姿态角(俯仰、偏航、滚转)偏差 在允许范围内,使火箭保持稳定飞行;
4
控制系统功能(contd.)
③ 对箭上设备供、配电和对各种自动装置实 施预定飞行时序的配电控制;
在该陀螺稳定平台上分别沿东向和北向装在该陀螺稳定平台上分别沿东向和北向装两个加速度计两个加速度计aaeeaann用以测量飞行器东西向和用以测量飞行器东西向和南北向的加速度南北向的加速度aaee惯性导航原理图惯性导航原理图18对加速度信号对加速度信号aaeenn作一次积分得相应的作一次积分得相应的飞行器速度分量飞行器速度分量对所得的速度对所得的速度vveenn再次积分得相应的飞再次积分得相应的飞行器位置变化量
导 引 信 号
关机信号
推力 控制
箭体(弹体)
关机指令 控制力矩
执行 机构
图7.1 火箭控制系统结构框图
8
惯性制导(inertial guidance)的测量仪表主要 应用惯性仪表测量箭体的运动参数;
基于单片机的四轴飞行器设计及仿真

摘要四轴飞行器具备飞行器的所有优点,又具备无人机的造价低、可重复性强以及事故代价低等特点,具有广阔的应用前景。
可应用于军事上的地面战场侦查和监视,获取不易获取的情报。
能执行禁飞区巡逻和近距离空中支持等特殊任务,可应对现代电子战、实现通信中继等现代战争模式。
在民用方面可用于灾后搜救、城市交通巡逻与目标跟踪等诸多方面。
工业上可以用在平安巡捡,大型化工现场等人工不容易到达的空间作业。
因此,四轴飞行器的研究意义重大。
本文主要讨论四轴飞行器的设计实现、建模分析与控制器设计。
首先从历史的角度介绍小型四轴飞行器的开展现状,引入现代四轴飞行器的研究,以及运用现代控制理论进展的研究方法和取得的结果。
其次是给出本次毕业设计的四轴飞行器样机模型与飞行控制器电路设计。
文中着重从机械构造与飞行控制器硬件电路设计方面论述四轴飞行器的设计。
文中详细分析了机械构造设计中的元器件选型,实现了一个切实可用,能满足应用研究的四轴飞行器模型。
之后分析四轴飞行器的飞行控制原理,在此根底上进展动力学分析,建立四轴飞行器的动力学模型。
通过软件设计实现飞行控制器方案,并通过protues软件践行模拟仿真以讨论其可行性。
关键词:四轴飞行器;单片机;飞行控制器;无人机ABSTRACT TheKeywords:Four aircraft; SCM; Flight controller; UAV目录1.绪论 (1)1.1国外研究现状 (1)1.2本文研究目的及意义 (2)1.3本文的主要容 (3)2.机械构造设计 (4)2.1元器件的选择 (4)2.1.1四轴飞行器根本工作原理 (4)2.1.2旋翼和机架确实定 (5)2.1.3其他小部件的选择 (5)2.2电机 (6)2.3总体构造 (7)3.硬件设计 (10)3.1概述 (11)3.2硬件电路的设计与选型 (11)3.2.1飞行控制系统构造 (11)3.2.2单片机选型及介绍 (12)3.2.3电机驱动电路 (14)3.2.4无线通讯与遥控 (17)3.2.5电源电路设计 (18)3.3 硬件局部整体电路图 (19)4.软件设计及调试分析 (20)4.1PWM调速原理分析 (20)4.2调速局部设计及分析 (22)4.3红外遥控系统的程序设计 (26)4.3.1红外发射局部 (26)4.3.2红外接收局部 (28)4.3.3键盘设计 (31)5. 调试分析 (33)5.1 Protues简介 (33)5.2调试结果分析 (37)完毕语 (38)致 (39)参考文献 (40)附录A:外文原文 (41)附录B:中文翻译 (51)附录C:程序源代码 (55)1 绪论1.1国外研究现状四轴飞行器是无人飞行器的一种,也就是智能机器人,四轴指飞行器的动力是由四个旋翼式的飞行引擎提供。
飞行器飞行原理ppt课件
2.3 飞机飞行原理
可重复使用的放热材料
用于像航天飞机类似的可重复使用的航天器的防热。 根据航天器表面不同温度的区域,采用相应的可重复使 用的防热材料。
例如:机身头部、机翼前缘温度最高,采用增强碳 碳复合材料,温度可耐受1593度;机身、机翼下表面前 部和垂尾前缘温度高,可采用防热隔热陶瓷材料;机身、 机翼上表面前部和垂尾前缘气动加热不是特别严重处, 可采用防热隔热的陶瓷瓦材料;机身中后部两侧和有效 载荷舱门处,温度相对较低(约350度),可采用柔性的 表面隔热材料;对于温度最高的区域,采用热管冷却和 强制循环冷却和发汗冷却等。
材料来制造飞机的重要受力构件和蒙皮; 2. 用隔热层来保护机内设备和人员; 3. 采用冷却液冷却结构内表面。
美国SR-71的机体结构的93%采用钛合 金越过热障,达到3.3倍音速。
52
2.3 飞机飞行原理
航天器的防热方法:
材料:石墨、陶瓷等。 高温下的热解和相变:固 液,固 气,液 气。 应用:烧蚀法适用于不重复使用的飞船、卫星等。
60
2.3 飞机飞行原理
B. 超声速飞机的机翼平面形状和布局形式
61
2.3 飞机飞行原理
62
2.3 飞机飞行原理
F-14 Tomcat 舰载机
米格-23
B-1 Lancer轰炸机
63
2.3 飞机飞行原理
边条涡
64
2.3 飞机飞行原理
超声速飞机的气动外形
鸭翼产生的脱体漩涡
机翼升力
鸭翼升力 机翼升力
流体黏性和温度有关,气体温度升高,黏性增大。液体相反。
4. 可压缩性
当气体的压强改变时,其密度和体积也改变,为气体可压缩性。 5. 声速
第23课《太空一日》(教学课件)-初中语文人教部编版七年级下册

本文用四个小标题来安排结构,这样写有什么好处?
四个小标题使文章结构清晰,层次分明,有助 于读者迅速了解全文内容,激发读者的阅读兴趣。
2.浏览全文,杨利伟遇到了哪些意外情况?他相应又有怎样的心理 活动或举动(预学一或思考探究一)?
意外情况
心理
举动
共振
非常痛苦 顽强忍受
本末倒置的错觉 令人难受 靠意志克服,闭着眼睛猛想适应、调整
何为英雄
1.作者在描述意外过程中的感受时,一再地用“非常痛 苦”“太可怕了”“觉得自己快不行了”“真的以为自己要 牺牲了”之类的语言来表现自己当时的痛苦与恐惧。这样的 反复渲染是否会损害他作为“航天英雄”的形象?请结合文 章进不行会分。析。 ①科学探索要实事求是,不能隐瞒,这是科学求真精神的表现; ②把这些痛苦和恐惧的感觉真实描写出来,可为以后的实验 提供改进的依据; ③这样具体描写也让读者对航天员无所畏惧、勇于克服艰 难、敢于献身的精神有更具体的理解。
聂海胜、张晓光、太空中飞行,标志着中国已
王亚平(女)
经基本掌握空间飞行器交
会对接技术。
2016年 10月17日
神舟十一号
景海鹏、陈东
驻留时间首次长达30天, 与天宫二号自动交会对接, 进入天宫二号空间实验室。
时间 航天器名称
航天员
主要任务或意义
2021年 6月17日
神舟十二号
聂海胜、刘伯明 、汤洪波
小标题
各部分的主要内容
“我”以为 自己要牺牲
火箭升空过程中产生共振,让人非常痛苦,几乎难以承受。
了
看到弧状的地球、各大洲和各个国家的方位、祖国的
“我”看到 各大省份;俯瞰北京的白天和夜晚,但没有看到长城。
了什么
飞船刚进入轨道时会产生“本末倒置”的错觉;还听
无人机基础ppt课件

电机一般也是四位数字编号,前面两位代表 定子直径,后面两位数字代表定子高度,单位 是mm。注意,不是外壳。
简单来说,前面2位越大,电机越肥,后面2 位越大,电机越高。又高又大的电机,功率就 更大。
例如: 8318电机,其定子直径即为83mm, 其定子高度为18mm;
6215电机,其定子直径即为62 mm, 其定子高度为15 mm
放电电压不得低于3.6V,一般设置的报警电压为3.7V,电池使用时,务必使用报警器,或 放电 者在上电时观察无人机本体上的电压显示器
其他辅助设备: 电台、Wifi 模块等、增益天线、跟
踪天线、HDMI转AV模块
16
多旋翼飞行器主要由机架、电机、电调和桨叶组成,为了满足实际飞行需 要,一般还需要配备电池、遥控器及飞行辅助控制系统。
17
机架
机架是指多旋翼飞行器的机身架,是整个飞行系统的飞行载体。一般使用 高强度重量轻的材料,例如碳纤维、PA66+30GF等材料。
4
培训目的
通过讲解了解无人机基本知识,认识无人机各 部分系统功能、运行原理。 通过此次培训认识无人机的工作原理,飞行原 理。 熟练掌握飞行器基础知识,并能判断故障。
5
按不同使用领域来划
军用无人机 民用无人机 消费级无人机
在民用领域,无人飞行器已经和即将使用的领域多达40多个,例如影视航拍、农业植保、海 上监视与救援、环境保护、电力巡线、渔业监管、消防、城市规划与管理、气象探测、交通
24
有刷电机优缺点:
• 1)有刷电机缺点: • a、电刷和换向器之间有摩擦,造成效率降低、噪音增加、容易发热,
有刷电机的寿命要比无刷短几倍。 • b、维护麻烦,需要不停的换电刷。 • c、因为电阻大,效率低、输出功率少。 • d、电刷和换向器摩擦会引起火花,干扰大。 • 2)有刷电机优点: • a、低速扭力性能优异、转矩大。 • b、相比无刷电机,少了很多电子零件,价格比无刷的便宜。 • c、由于少了电子零件,少了由于传感器受干扰、电子零件失灵等影响。
空间飞行器设计-航天器的基本组成 ppt课件
1. 外壳结构
保证所要求的结构外形、及必要的表面性质, 如对光或无线电波的反射、吸收等。同时, 外壳结构应能抵御空间高能粒子的辐射。
2. 承力结构:
传递火箭推力,是承受卫星的超重等载荷的
主要承力件。
ppt课件
26
3.密封结构: 主要承受内压。其功能是在宇宙空间环境内,
人工建立一个适宜的环境,使其保持一定的温 度、气压等,供某些精密仪器安装,和保证其 正常工作。另有各种液体和气体容器等密封结 构。
结构还可按力学性能分为:柔性、刚性、
半刚性结构。
ppt课件
29
10.2 温度控制分系统
卫星空间运行环境:-270oC深冷空间。 主要热源有:太阳辐射热、地球红外辐射热和 地球反射热,星内仪器自身发热及相互之间的 传热。
为保证其仪器工作正常,需进行温度控制。
星内仪器有不同的温度要求:电池、固体 远地点发动机等。
ppt课件
16
三轴稳定,p精pt课件度0.2°
17
三、其它方式的卫星构形
1. 单太阳帆板卫星的构形 太阳帆板只安装在卫星的一个侧,也就是说 要求一侧对太阳而另一侧不对太阳的构形。因 为卫星有效载荷上有制冷设备。
ppt课件
18
中巴资源卫星
ppt课件
19
ppt课件
20
2.有合成孔径雷达的对地观测卫星的构形
第10讲 航天器的基本组成
ppt课件
1
近地空间环境的特点: 高真空、强辐射、超低温背景、冷热交变 航天器完成预定的空间任务,需有若干不同
功能的分系统。 通用系统:指所有航天器均需安装的功能相同
的系统。主要有:结构系统、温度控 制系统、控制系统、电源分系统、天 线分系统、无线电分系统等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
11.2 返回过程
返回过程是一减速过程,从轨道上的高速减 速到接地时的安全着陆速度。 理论上,实现返回有两种方法:利用制动火 箭 和 利用空气阻力。 单纯利用火箭动力,会增加运载火箭的有效 载荷,增加起飞质量;不经济,不现实。 利用稠密大气(几十km)对航天器的空气阻 力,使航天器减速;经济,可行。需一能量不大 的制动火箭。
19
升力体性能介于弹道式再入航天器和有翼航天器 之间,吸收了两者的长处。 气动载荷较低,制动过载不大(2g),结构重量中等, 要在大气内机动飞行数百公里,可水平着陆,可多次 重复使用。 如美国X-33(“冒险星” 1/2缩聚的原型机)单级 入轨火箭验证机。由洛克希德.马丁公司著名的“臭 鼬工程队”于1996年开始研制,长 20.29 米,高 5.88 米,翼展 22.06 米。因存在诸多难以突破的技术难关 (如线性气塞式发动机),NASA 于2001年3月取消 了已经耗资了 13 亿美元的 X-33 项目。
10
11.3.1 弹道式再入航天器(L/D=0~0.5) 1. 纯弹道式再入航天器 缺点:再入过程的运动无法控制。制动火箭工 作结束后,落点便已决定。落点偏差大(可达 上百公里); 加热时间短,迎风面热流大,常采用烧蚀 式防热结构; 再入过载大(8~10g),只能垂直着陆。可 采取伞状阻尼板。
11
第11讲 航天器 再入 与返回
1
航天器再入与返回
航天器分进入式(返回型)和非进入式(非 返回型)两大类。 航天器从大气层外的飞行轨道进入地球的稠 密大气层,称“进入”或“再入”。 航天器脱离空间轨道进入大气层并在地面安 全着陆的过程,称航天器的返回。 航天器设计中有意识地将返回物品和设备集 中安装在“再入舱”内,其余的物品配臵在“设 备舱”、“轨道舱”等内。
14
一次再入式轨道是航天器再入大气层后,在 飞行过程中轨道呈单调下降,不再跃出大气层。 从近地轨道返回地面均采用这种轨道。 跳跃式轨道又称起伏式或回弹式再入轨道。 航天器在进入大气层一段时间后,调整升 力使航天器上行飞出大气层;然后再二次进入。 可多次进出大气层,以增加航程、增加调整落 点的范围,同时减少再入制动过载。 美国Apollo飞船和前苏联“探测器-6”采用。
15
起伏式或回弹式轨道,可用于控D>0.5) 可分为升力体(0.5<L/D<1.3)和有翼航天 器 (L/D>1.3)两种。 1.有翼航天器
具有升力面,升阻比大于1.3,可滑翔数千 公里、水平着陆。可以多次重复使用,最大制 动过载1g。外形兼顾从高超音速到亚音速各个 阶段,几何外形和结构复杂。气动加热热流低, 但时间长、总加热量大。防热结构沉重。
17
航天飞机 (Space Shuttle) 属于有翼航天器。 1981年4月, 美Columbia 号首 次载人升空并成 功返回;1988年 11月,苏“暴风 雪”号首次不载 人轨道飞行成功。
18
2. 升力体
又称升力艇。没有机翼。利用机身的气动 力外形产生一定的升力。 升阻比在0.5-1.3之 间。
12
2. 半弹道式再入航天器(L/D<0.5)
图· 13-3 “双子星座”飞船再入舱重心偏心 e=76.2mm。相应的配平攻角=14o ,L/D=0.19。
13
美国首次在“双子星座”3号飞船上采用了 半弹道式再入技术,再入舱重心偏差76.2mm, 相应的配平攻角140,飞船可在纵向550km、横 向100km范围内调整飞船落点,再入过载为4- 5g,而纯弹道式再入情况下为6g。 前苏联从“联盟3”号飞船开始采用半弹道 再入技术, 此后的“联盟T”、“联盟TM”等。 按再入轨道可分为一次再入和跳跃式再入 两种。
4
返回的四个阶段: (1) 离轨段(制动飞行段) 制动火箭作用,脱离原运行轨道,转入一 条能进入大气层的过渡轨道。
(2) 大气层外自由下降段 制动火箭熄火,航天器在重力作用下沿过 渡轨道自由下降。在100km左右进入稠密大气 层(AB段)。
5
(3) 再入大气层(大气层内飞行段) (B点以下)
(4) 着陆段(回收段) 当航天器下降到15km以下的高度,进一步 减速,保证其安全着陆。
2. 半弹道式再入航天器(L/D<0.5) 在纯弹道式基础上,增加有限的、可控的 升力,以控制再入轨道的航天器叫半弹道式 (升力—弹道式)再入航天器。 原理:将航天器重心配臵在离中心轴一段 很小的距离处,加以“配平攻角”,产生部分 升力。将航天器绕其纵轴旋转一角度,升力得 以分解为一个向上的力和一侧向力。后者用以 控制航天器的落点。 目前,这种再入可控制落点偏差范围在2 km以内。
2
11.1 返回技术
返回技术是一项重要技术,目前只有少数 国家掌握。
•20世纪40年代末,美、苏实现地球物理火箭和高空生 物火箭箭头的回收。 •50年代末,美国发展照相侦察卫星,经12次连续失败, 于1960.8首次从海上回收“发现者13”回收舱。 •60年代,掌握航天器从绕地轨道和从月球轨道弹道式 返回地面技术。 •70年代,在金星和火星软着陆。“大鸟”侦察卫星的 胶卷舱分期返回。我国返回式卫星。 •80年代,航天飞机,实现了升力式返回技术。
航天器从其他星球航行归来,进入地球大 气层(VII),同样要经历再入段和着陆段。
6
航天器返回过程
7
11.3 返回型航天器的分类
再入航天器以很高的速度进入大气层,承 受严重的气动加热和制动过载。因此,航天器 的气动外形、结构、返回轨道、返回控制等都 是按再入段工作条件设计的。 航天器在大气层内运动,除受重力外还受 空气动力作用。空气动力可分解为阻力D和升 力L。按高超声速时的升阻比大小,再入航天器 可分为弹道式和升力式(滑翔式)两大类。
8
11.3 返回型航天器的分类(contd.)
再入航天器的分类
9
11.3.1 弹道式再入航天器(L/D=0~0.5) 1. 纯弹道式再入航天器 无升力或只有无法控制的有限升力;外形一 般是钝头的轴对称旋转体;在大气里经历的时 间很短(不超过400s),总加热量相对小些, 防热结构简单。 美、苏早期的返回式航天器均属此类。