蜗轮蜗杆(常见普通)的规格及尺寸
普通圆柱蜗杆传动的基本参数及几何尺寸计算

普通圆柱蜗杆传动的基本参数及几何尺寸计算1.基本参数:(1)模数m和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即m a1=m t2=mαa1=αt2蜗杆轴向压力角与法向压力角的关系为:tgαa=tgαn/cosγ式中:γ-导程角。
(2)蜗杆的分度圆直径d1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显著减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。
对于传递运动的传动,z2可达200、300,甚至可到1000。
z1和z2的推荐值见下表(4)导程角γ蜗杆的形成原理与螺旋相同,所以蜗杆轴向齿距p a与蜗杆导程p z的关系为p z=z1p a,由下图可知:tanγ=p z/πd1=z1p a/πd1=z1m/d1=z1/q导程角γ的范围为3.5°一33°。
蜗轮模数安装尺寸

蜗轮模数安装尺寸
根据国际标准,蜗轮和蜗杆配对的制造和安装需要遵循以下尺寸要求:
1. 蜗轮的外径与齿数决定了其模数。
模数被定义为蜗杆传动中每毫米齿宽所含有的齿数。
常见的蜗轮模数有1.0、1.5、
2.0、2.5、
3.0等。
2. 蜗轮的宽度应根据设计要求来确定,常用的宽度范围是蜗杆的2至2.5倍。
3. 蜗轮孔径常采用与蜗杆直径相匹配的孔径尺寸,以确保配对的稳定性。
4. 蜗杆的齿宽应与蜗轮的齿宽相等,并保证牙侧间隙适当,以确保有效的传动和润滑。
5. 蜗杆的蜗旋角决定了传动的速比。
常用的蜗旋角为5°、10°、15°等。
6. 蜗杆轴承应具有足够的强度和刚度,以承受传动载荷并保持稳定运行。
7. 蜗轮蜗杆的安装应保证齿轮中心线的共轴性和正交性,以确保传动的精度和可靠性。
以上是蜗轮模数安装尺寸的基本要求,具体的尺寸参数应根据具体的传动系统设计和制造要求来确定。
在使用时,还需结合实际情况进行适当调整和优化。
x第6章蜗轮蜗杆
设计:潘存云
圆柱蜗杆 环面蜗杆
阿基米德螺线
设计:潘存云
设计:潘存云
渐开线
基圆
设计:潘存云
γ
阿基米德蜗杆 2α
设计:潘存云
α
渐开线蜗杆
蜗杆旋向:左旋、右旋(常用)
判定方法:与螺旋和斜齿轮的旋向判断方法相同。
精度等级:
对于一般动力传动,按如下等级制造: v1<7.5 m/s ----7级精度; v1< 3 m/s ----8级精度; v1< 1.5 m/s ----9级精度;
2
2、1
1
蜗轮齿数z2 28~52
28~54 28~80
>40
4. 蜗杆的导程角λ 将分度圆柱展开得:
tgλ1=l/π d1 = z1 pa1/π d1 = mz1/d1
β1 λ1
设计:潘存云
设计:潘存云
pa1
l
d1
λ1
π d1
5.蜗杆直径系数q 加工时滚刀直径等参数与蜗杆分度圆直径等参数相 同,为了限制滚刀的数量,国标规定分度圆直径只 能取标准值,并与模数相配。
一般蜗杆:40 45 钢调质处理(硬度为220~250HBS) 蜗轮材料:vS >12 m/s时→ ZCuSn10P1锡青铜制造。
vS <12 m/s时→ ZCuSn5Pb5Zn5锡青铜(含锡量低) vS ≤6 m/s时→ ZCuAl10Fe3铝青铜。 vS <2 m/s时→球墨铸铁、灰铸铁。
二、蜗杆蜗轮的结构 蜗杆通常与轴制成一体 → 蜗杆轴
z1=4
η=0.87~0.92
开式传动: z1=1、2 η=0.60~0.70
举例:
例1:电动机驱动的普通圆柱蜗杆传动,如图所示。已知模数
蜗杆传动主要参数及几何尺寸.

为了限制 滚刀数目
d1=mq
4. 蜗杆的导程角γ 轴面齿距 pa1=πm 导程 s=z1pa1=z1πm
tan z1 pa1 z1πm z1m z1
πd1 πd1 mq q
二. 蜗杆传动的几何尺 寸
三、蜗杆蜗轮啮合传动 1. 正确啮合条件
中间平面:蜗杆传动似齿轮齿条传动
ma1=mt2=m αa1=αt2=α γ=β (旋向相同)
中间平面:
在阿基米德蜗杆传动中,通过蜗杆轴线垂直蜗 轮轴线的平面
在中间平面内,阿基米德蜗杆传动 相当于齿轮于齿条传动。因此,蜗杆传 动的设计计算以中间平面的参数和几何 几何关系为准。
一、蜗杆传动的主要参数
1. 模数m、压力角a、齿顶高系数h*a和顶隙系数c*
蜗杆的参数
蜗轮的参数
①轴面模数ma1=m ②轴面压力角αa1= α ③齿顶高系数h*a=1 ④顶隙系数c*=0.2
2. 标准中心距
a
1 2
(d1
d2)
m 2
(q
z2 )
传动比i 5~6
z1
6
z2 30~36
7~13 4
28~52
14~27 2
28~54
28~40 2、1 28~80
>40 1
>40
3. 蜗杆的分度圆直径d1 蜗轮配对加工法
①采用与蜗杆参数相同的滚刀;
②滚刀的安装位置同蜗杆传动的 工作位置;直径系数
有多少d1就有多少滚刀
①端面模数mt2=m ②端面压力角αt2=α ③齿顶高系数h*a =1 ④顶隙系数c*=0.2
2. 传动比i、蜗杆头数z1和蜗轮齿数z2
i 1 z2 2 z1
z1少,传动比大,效率低; z1多, 加工难,常取1、2、 4、6。
蜗轮蜗杆常见普通的规格及尺寸
常见普通蜗轮蜗杆的规格及尺寸例:蜗杆传动,已知模数m=4.蜗杆头数z1=1,蜗轮齿数z2=50,特性系数q=10。
求传动中心距a=?变位系数0时:中心距a=(蜗杆分度圆+蜗轮分度圆)/2=(特性系数q*模数m+蜗轮齿数Z2*模数m)/2=(10*4+50*4)/2=120特性系数:蜗杆的分度圆直径与模数的比值称为蜗杆特性系数。
加工蜗轮时,因为是直径和形状与蜗杆相同的滚刀来切制,由上式可看出,在同一模数下由于Z1和λ0的变化,将有很多不同的蜗杆直径,也就是说需要配备很多加工蜗轮的滚刀。
为了减少滚刀的数目,便于刀具标准化,不但要规定标准模数,同时还必须规定对应于一定模数的Z1/tgλ0值,这个值用q表示,称之为蜗杆特性系数。
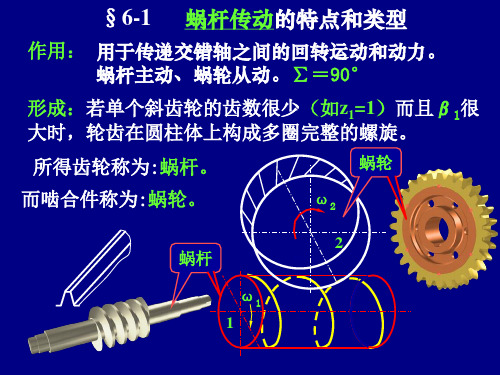
圆柱蜗轮、蜗杆设计参数选择蜗轮和蜗杆通常用于垂直交叉的两轴之间的传动(图1)。
蜗轮和蜗杆的齿向是螺旋形的,蜗轮的轮齿顶面常制成环面。
在蜗轮蜗杆传动中,蜗杆是主动件,蜗轮是从动件。
蜗杆轴向剖面类是梯形螺纹的轴向剖面,有单头和多头之分。
若为单头,则蜗杆转一圈蜗轮只转一个齿,因此可以得到较高速比。
计算速比(i)的公式如下:i=蜗杆转速n1蜗轮转速n2=蜗轮齿数z2蜗杆头数z11、蜗轮蜗杆主要参数与尺寸计算主要参数有:模数(m)、蜗杆分度圆直径(d1)、导程角(r)、中心距(a)、蜗杆头数(或线数z1)、蜗轮齿数(z2)等,根据上述参数可决定蜗杆与蜗轮的基本尺寸,其中z1、z2由传动要求选定。
(1)模数m 为设计和加工方便,规定以蜗杆轴项目数mx和蜗轮的断面模数mt为标准模数。
对啮合的蜗轮蜗杆,其模数应相等,及标准模数m=mx=mt。
标准模数可有表A查的,需要注意的是,蜗轮蜗杆的标准模数值与齿轮的标准模数值并不相同。
表A图1图2(2)蜗杆分度圆直径d1 再制造蜗轮时,最理想的是用尺寸、形状与蜗杆完全相同的蜗轮滚刀来进行切削加工。
但由于同一模数蜗杆,其直径可以各不相同,这就要求每一种模数对应有相当数量直径不同的滚刀,才能满足蜗轮加工需求。
涡轮蜗杆基本知识

普通圆柱蜗杆传动的基本参数及几何尺寸计算1.基本参数:(1)模数m和压力角α:m a1=m t2=mαa1=αt2蜗杆轴向压力角与法向压力角的关系为:tgαa=tgαn/cosγ式中:γ-导程角。
(2)蜗杆的分度圆直径d1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显著减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。
对于传递运动的传动,z2可达200、300,甚至可到1000。
z1和z2的推荐值见下表。
4)导程角γ蜗杆的形成原理与螺旋相同,所以蜗杆轴向齿距p a与蜗杆导程p z的关系为p z=z1p a,由下图可知:tanγ=p z/πd1=z1p a/πd1=z1m/d1=z1/q导程角γ的范围为3.5°一33°。
蜗轮蜗杆常见普通的规格及尺寸

蜗轮蜗杆常见普通的规格及尺寸集团公司文件内部编码:(TTT-UUTT-MMYB-URTTY-ITTLTY-常见普通蜗轮蜗杆的规格及尺寸例:蜗杆传动,已知模数m=4.蜗杆头数z1=1,蜗轮齿数z2=50,特性系数q=10。
求传动中心距a=?0时:中心距a=(+蜗轮)/2=(特性系数q*m+蜗轮齿数Z2*模数m)/2=(10*4+50*4)/2=120特性系数:蜗杆的与模数的比值称为蜗杆特性系数。
加工蜗轮时,因为是直径和形状与蜗杆相同的滚刀来切制,由上式可看出,在同一下由于Z1和λ0的变化,将有很多不同的蜗杆直径,也就是说需要配备很多加工蜗轮的滚刀。
为了减少滚刀的数目,便于刀具标准化,不但要规定标准模数,同时还必须规定对应于一定模数的Z1/tgλ0值,这个值用q表示,称之为蜗杆特性系数。
圆柱蜗轮、蜗杆设计参数选择蜗轮和蜗杆通常用于垂直交叉的两轴之间的传动(图1)。
蜗轮和蜗杆的齿向是螺旋形的,蜗轮的轮齿顶面常制成环面。
在蜗轮蜗杆传动中,蜗杆是主动件,蜗轮是从动件。
蜗杆轴向剖面类是梯形螺纹的轴向剖面,有单头和多头之分。
若为单头,则蜗杆转一圈蜗轮只转一个齿,因此可以得到较高速比。
计算速比(i)的公式如下:i=蜗杆转速n1蜗轮转速n2=蜗轮齿数z2蜗杆头数z11、蜗轮蜗杆主要参数与尺寸计算主要参数有:模数(m)、蜗杆分度圆直径(d1)、导程角(r)、中心距(a)、蜗杆头数(或线数z1)、蜗轮齿数(z2)等,根据上述参数可决定蜗杆与蜗轮的基本尺寸,其中z1、z2由传动要求选定。
(1)模数m 为设计和加工方便,规定以蜗杆轴项目数mx和蜗轮的断面模数mt 为标准模数。
对啮合的蜗轮蜗杆,其模数应相等,及标准模数m=mx=mt。
标准模数可有表A查的,需要注意的是,蜗轮蜗杆的标准模数值与齿轮的标准模数值并不相同。
表A(2)蜗杆分度圆直径d1 再制造蜗轮时,最理想的是用尺寸、形状与蜗杆完全相同的蜗轮滚刀来进行切削加工。
但由于同一模数蜗杆,其直径可以各不相同,这就要求每一种模数对应有相当数量直径不同的滚刀,才能满足蜗轮加工需求。
蜗轮蜗杆参数设定

蜗轮分度圆直径 d2 d2=mz2=2a-d1-2x2.m
蜗轮喉圆直径 da2 da2=d2+2ha2
蜗轮齿根圆直径 df2 df2=d2-2ha2
蜗轮齿顶高 ha2 ha2=1/2(da2-d2)=m(ha*+x2)
蜗杆齿根圆直径 df1 df1=d1-2hf1=da-2(ha*m+c)
顶隙 c c=c*m 按规定
渐开线蜗杆齿根圆直径 db1 db1=d1.tgr/tgrb=mz1/tgrb
蜗杆齿顶高 ha1 ha1=ha*m=1/2(da1-d1) 按规定
齿形角 a aa=20。或an=20。 按蜗杆类型确定
模数 m m=ma=mn/cosr 按规定选取
传动比 i i=n1/n2 蜗杆为主动,按规定选取
齿数比 u u=Z2/Z1当蜗杆主动时,i=u
蜗轮变位系数 x2 x2=a/m-(d1+d2)/2m
蜗轮齿宽角 θ θ=2arcsin(b2/d1)
蜗杆轴向齿厚 sa sa=1/2(πm)
蜗杆法向齿厚 sn sn=sa.cosr
蜗轮齿厚 st 按蜗杆节圆处轴向齿槽宽ea'确定
蜗杆节圆直径 d1' d1'=d1+2x2m=m(q+2x2)
8.2.3 普通圆柱蜗杆传动的几何尺寸计算
普通圆柱蜗杆传动基本几何尺寸计算关系式:
名 称 代 号 计 算 关 系 式 说 明
中心距 a a=(d1+d2+2x2m)/2 按规定选取
蜗杆头数 z1 按规定选取
蜗轮齿数 z2 按传动比确定
蜗杆直径系数 q q=d1/m
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
常见普通蜗轮蜗杆的规格及尺寸
例:蜗杆传动,已知模数m=4.蜗杆头数z1=1,蜗轮齿数z2=50,特性系数q=10。
求传动中心距a=变位系数0时:
中心距a=(蜗杆分度圆+蜗轮分度圆)/2=(特性系数q*模数m+蜗轮齿数Z2*模数m)/2=(10*4+50*4)/2=120
特性系数:蜗杆的分度圆直径与模数的比值称为蜗杆特性系数。
加工蜗轮时,因为是直径和形状与蜗杆相同的滚刀来切制,由上式可看出,在同一模数下由于Z1和λ0的变化,将有很多不同的蜗杆直径,也就是说需要配备很多加工蜗轮的滚刀。
为了减少滚刀的数目,便于刀具标准化,不但要规定标准模数,同时还必须规定对应于一定模数的Z1/tgλ0值,这个值用q表示,称之为蜗杆特性系数。
圆柱蜗轮、蜗杆设计参数选择
蜗轮和蜗杆通常用于垂直交叉的两轴之间的传动(图1)。
蜗轮和蜗杆的齿向是螺旋形的,蜗轮的轮齿顶面常制成环面。
在蜗轮蜗杆传动中,蜗杆是主动件,蜗轮是从动件。
蜗杆轴向剖面类是梯形螺纹的轴向剖面,有单头
和多头之分。
若为单头,则蜗杆转一圈蜗轮只转一个齿,因此可以得到较高速比。
计算速比(i)的公式如下:
i=蜗杆转速n1
蜗轮转速n2 =
蜗轮齿数z2蜗杆头数z1
1、蜗轮蜗杆主要参数与尺寸计算
主要参数有:模数(m)、蜗杆分度圆直径(d1)、导程角(r)、中心距(a)、蜗杆头数(或线数z1)、蜗轮齿数(z2)等,根据上述参数可决定蜗杆与蜗轮的基本尺寸,其中z1、z2由传动要求选定。
(1)模数m 为设计和加工方便,规定以蜗杆轴项目数mx和蜗轮的断面模数mt为标准模数。
对啮合的蜗轮蜗杆,其模数应相等,及标准模数m=mx=mt。
标准模数可有表A查的,需要注意的是,蜗轮蜗杆的标准模数值与齿轮的标准模数值并不相同。
表A
图1
图2
(2) 蜗杆分度圆直径d1 再制造蜗轮时,最理想的是用尺寸、形状与蜗杆完全相同的蜗轮滚刀来进行切削
加工。
但由于同一模数蜗杆,其直径可以各不相同,这就要求每一种模数对应有相当数量直径不同的滚刀,才能满足蜗轮加工需求。
为了减少蜗轮滚刀数目,在规定标准模数的同时,对蜗杆分度圆直径亦实行了标准化,且与m 有一定的匹配。
蜗杆分度圆直径d1与轴向模数mx 之比为一标准值,称蜗杆的直径系数。
即
q= 蜗杆分度圆直径模数 =d1m
d1=mq
有关标准模数m 与标准分度圆直径d1的搭配值及对应的蜗杆直径系数参照表A
(3) 蜗杆导程角r 当蜗杆的q 和z1选定后,在蜗杆圆柱上的导程角即被确定。
为导程角、导程和分度圆
直径的关系。
tan r= 导程分度圆周长 = 蜗杆头数x 轴向齿距分度圆周长 =z1px d1π =z1πm πm q =z1
q
相互啮合的蜗轮蜗杆,其导程角的大小与方向应相同。
(4) 中心距a 蜗轮与蜗杆两轴中心距a 与模数m 、蜗杆直径系数q 以及蜗轮齿数z2间的关系式如下:
a=
d1+d22 =m
q
(q+z2)
蜗杆各部尺寸如表B
名称代号公式
分度圆直径 d1齿顶高 ha1
齿根高 hf1
齿高 h1
齿顶圆直径 da1齿根圆直径 df1轴向齿距 px d 1=mq
ha1=m
hf1=
h1=ha1+hf1=
da1=d1+2ha1=d1+2m df1=d1-2hf1=d1+ px=πm
2、蜗轮蜗杆的画法
(1) 蜗杆的规定画法参照图1图2(2)蜗轮的规定画法参照图1图2(3)蜗轮蜗杆啮合画法参照图1图2.名称代号公式
蜗杆导程 pz
导程角 r
轴向齿形角α
蜗杆齿宽 b1
Pz=z1px
Tanr=
z1
q
α=20°
当z1=(1~2),b1≥(11+m
当z1=(3~4),b1≥+m。