三角高程测量
三角高程测量规范

三角高程测量规范三角高程测量是地理信息系统中常用的一种测量方法,它通过观测不同位置的视线方位角和仰角,来确定地理位置的高程。
为了保证测量结果的准确性和可靠性,在实际工作中需要遵循一定的测量规范。
下面就是三角高程测量的一些常见规范。
1. 测量设备:使用三角高程测量需要配备一套精确的测量设备,包括测量仪器、仪器三脚架、平板、测量杆等。
这些设备应当符合国家测绘行业的标准,保证测量精确度和重复性。
2. 观测站设置:测量中需要选择合适的观测站点,观测站点的选择应当满足以下条件:地势平坦、地表稳定、无阴影和悬空物遮挡等,并且要求观测站之间的距离合适,以保证测量结果的有效性。
3. 观测天气条件:三角高程测量过程中的观测天气条件对结果的准确性有很大的影响。
通常情况下,应避免在雾、雨、大风等恶劣天气条件下进行测量,以保证观测结果的稳定性。
4. 观测精度要求:根据实际需求确定测量的精度要求,一般要求不同观测站点之间的高程差别不超过一定范围。
在实际操作中应使用合适的仪器和方法来提高测量的精度。
5. 观测过程中的纠偏和调整:在完成初始观测后,需要根据实际情况进行数据纠偏和调整,以消除误差和提高测量结果的准确性。
6. 数据处理和成果输出:完成测量后,应对观测数据进行处理和分析,以得到最终的测量结果。
处理过程中应当使用合适的数学模型和算法,并充分考虑各种误差来源,以确保结果的可靠性和准确性。
7. 测量记录和归档:在测量过程中应当详细记录观测数据、测量步骤和方法,并妥善保存测量原始数据和处理结果,以备后续的查验和验证。
以上就是三角高程测量的一些常见规范。
通过遵循这些规范,可以提高测量结果的准确性和可靠性,从而更好地应用于地理信息系统和测绘工作中。
三角高程测量

中铁七局集团武汉工程有限公司测绘分公司
专业、专注、专心
勇于跨越 追求卓越
1、基本要求
1.1布设原则: 1.1.1以高程导线布设测区的基本高程控制,其等级应与测区范围相适 应,满足加密需要,一般应与国家水准点连测。 1.1.2导线水准点的高程,采用正常高系统和“1985国家高程基准”。 1.1.3各等级高程导线网的最弱点相对于高等级点(或起始点)的高程 中误差不超过0.05m。 1.1.4高程导线一般应在高级点间布设成附合路线或高程导线网。当测 区远离国家水准点时,也可布设支线引测国家水准点高程,作为测区的 高程起算点。 1.1.5当采用支线引测高程时,引测路线的等级不应低于测区基本高程 控制等级。引测高程的起算点必须进行检测。引测支线的长度可按表1 的规定放宽0.5倍。 1.1.6高程导线测量可与同等级水准测量混合使用,但在同一测段中只 能使用一种方法。
专业、专注、专心
勇于跨越 追求卓越
两点距离D>300m时,考虑地球曲率和大气折光的影响
地球曲率的影响:
c D2 2R
大气折光的影响: 综合两项的影响:
r k D2 2R
f c - r (1 k)D2 2R
当D=300m,K取0.14时,f≈5.9mm
中铁七局集团武汉工程有限公司测绘分公司
1、边长误差 边长误差决定于距离丈量方法。用普通视距法测定距离,精度只有
1/300;用电磁波测距仪测距,精度很高,边长误差一般为几万分之一到 几十万分之一。边长误差对三角高程的影响与垂直角大小有关,垂直角愈 大,其影响也愈大。因此,尽可能利用短边传算高程。
2、垂直角误差 垂直角观测误差包括仪器误差、观测误差和外界环境的影响。垂直
环线或附合路线闭合差
三角高程测量
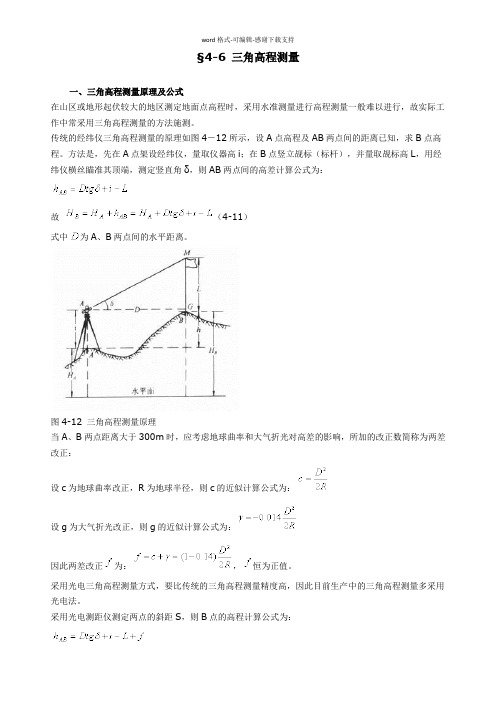
§4-6 三角高程测量一、三角高程测量原理及公式在山区或地形起伏较大的地区测定地面点高程时,采用水准测量进行高程测量一般难以进行,故实际工作中常采用三角高程测量的方法施测。
传统的经纬仪三角高程测量的原理如图4-12所示,设A点高程及AB两点间的距离已知,求B点高程。
方法是,先在A点架设经纬仪,量取仪器高i;在B点竖立觇标(标杆),并量取觇标高L,用经纬仪横丝瞄准其顶端,测定竖直角δ,则AB两点间的高差计算公式为:故(4-11)式中为A、B两点间的水平距离。
图4-12 三角高程测量原理当A、B两点距离大于300m时,应考虑地球曲率和大气折光对高差的影响,所加的改正数简称为两差改正:设c为地球曲率改正,R为地球半径,则c的近似计算公式为:设g为大气折光改正,则g的近似计算公式为:因此两差改正为:,恒为正值。
采用光电三角高程测量方式,要比传统的三角高程测量精度高,因此目前生产中的三角高程测量多采用光电法。
采用光电测距仪测定两点的斜距S,则B点的高程计算公式为:(4-12)为了消除一些外界误差对三角高程测量的影响,通常在两点间进行对向观测,即测定hAB和hBA,最后取其平均值,由于hAB和hBA反号,因此可以抵销。
实际工作中,光电三角高程测量视距长度不应超过1km,垂直角不得超过15°。
理论分析和实验结果都已证实,在地面坡度不超过8度,距离在1.5km以内,采取一定的措施,电磁波测距三角高程可以替代三、四等水准测量。
当已知地面两点间的水平距离或采用光电三角高程测量方法时,垂直角的观测精度是影响三角高程测量的精度主要因素。
二、光电三角高程测量方法光电三角高程测量需要依据规范要求进行,如《公路勘测规范》中光电三角高程测量具体要求见表4-6。
表4-6 光电三角高程测量技术要求往返各注:表4-6中为光电测距边长度。
对于单点的光电高程测量,为了提高观测精度和可靠性,一般在两个以上的已知高程点上设站对待测点进行观测,最后取高程的平均值作为所求点的高程。
三角高程测量技术的原理与应用
三角高程测量技术的原理与应用引言:三角高程测量技术是一种用于确定地面上各点的高程差的技术,广泛应用于土地测量、建筑工程、地质勘探等领域。
本文将介绍三角高程测量技术的原理以及其在实际应用中的一些案例。
一、三角高程测量技术的原理三角高程测量技术基于三角形的几何性质,利用三角形的内角和外角之和等于180°的特点,通过测量三角形内角或边长的变化来计算高程差。
1.三角形的内角和在平面几何中,三角形的内角和总是等于180°。
通过测量三角形的内角和可以计算出与地面平行的三角形的高程差。
2.三角形的边长比例当两个三角形有一个共边时,它们的边长比例与高程差之间存在一定的关系。
根据这个关系可以通过测量两个三角形的边长比例来计算高程差。
3.水平仪水平仪是一种测量仪器,可以用来测量物体相对于地面的水平度。
通过水平仪可以测量物体的高度差,并计算出高程差。
二、三角高程测量技术的应用案例三角高程测量技术在土地测量、建筑工程和地质勘探等领域有着广泛的应用。
下面将分别介绍这些领域中的一些应用案例。
1.土地测量在土地测量中,三角高程测量技术可以用于确定不同地块之间的高程差,从而帮助规划和设计土地利用。
例如,在城市规划中,通过测量不同街区的高程差,可以确定出最佳的排水系统设计,以应对雨水的排放。
2.建筑工程在建筑工程中,三角高程测量技术可以用于确定建筑物的高程差,从而保证建筑物的平整度和垂直度。
例如,在建造高楼大厦时,通过测量建筑物不同层之间的高程差,可以确保整个建筑物的垂直度。
3.地质勘探在地质勘探中,三角高程测量技术可以用于确定地质构造的高程差,从而提供地质勘探的基础数据。
例如,在勘探矿产资源时,通过测量不同地质构造点的高程差,可以确定出矿石的分布情况。
三、三角高程测量技术的优势与难点1.优势三角高程测量技术具有测量范围广、测量精度高的优势。
由于三角测量是一种基于三角形几何性质的测量方法,可以适用于不同尺度和不同地形的测量需求。
(完整版)三角高程测量
32
2020年8月9日星期日
四、偏心误差系数的测定
基本原理:因为相对观测竖角(绝对值) 的平均值可消除竖盘偏心的影响,因此也可 通过相对观测的竖角来反映偏心误差。
测定步骤 1.为了减小竖盘指标差的影响,在平坦 地区选择两个相距约50m的固定点A、B, 在两点上竖立标尺,如图10-8所示。
33
2020年8月9日星期日
α=(R–L-180°)/2
=(278°12′24″- 81°47′36″- 180°)
= + 8°12′24″
12
2020年8月9日星期日
对高度角式注记,竖直角的计算 当竖直角为仰角时(参考前面的示意图)
α左 = L - 0° α右 = 180°- R α= (L – R + 180°)/2 (a) 当竖直角为俯角时
竖盘指标水准管
竖盘指标水准 管微动螺旋
6
图中3号螺旋为 竖盘指标水准管 微动螺旋
2020年8月9日星期日
2.竖盘的注记形式 顺时针,逆时针。
望远镜水平时,竖盘读数为90°的整倍数。
竖盘逆时针注记(盘左高度角式)
7
2020年8月9日星期日
竖盘顺时针注记(盘左天顶距式)
8
2020年8月9日星期日
3.竖角的表示形式
• 计算竖直角:各按三丝所测得的L和R分别计算出相应
的竖角,最后取平均值为该竖角的角值。
22
2020年8月9日星期日
五、指标差的检验与校正
1.测定指标差 盘左、盘右瞄准同一明显目标,观测多个测回 求得指标差。 2.求出盘左或盘右的正确读数(读数减指标 差)。 3.微调竖盘指标水准管,使竖盘位于正确读数。 4.调节竖盘水准管校正螺丝,使气泡居中。
三角高程测量

关于球气差的影响与水平距离间的关系 (这里取K=0.14)
平 距 S (m) 影响值 (mm) 平 距 S (m) 影响值 (mm) 100 1 200 3 300 6 400 11
500
17
1000
67
1500
152
2000
1. 三角高程测量的精度情况分析 三角高程测量的精度与竖角观测误
差、边长测量误差、大气折光误差、仪
器高与目标高的量测误差等多种因素有
关。其中主要的误差影响因素是竖角观
测误差和大气折光系数的误差。
2. 竖角观测误差分析
竖角观测误差的影响因素包括:照 准误差、读数误差及竖盘指标水准管气 泡居中误差等。其中影响最大的是照准 误差。 照准误差由目标的形状、颜色、亮 度、空气对流、空气的能见度等多种因
§5.10
三角高程测量
一、三角高程测量的基本原理
hAB S tan i v
二、三角高程测量 顾及球气差影响的基本公式
(一)水准测量时地球曲率和大气折光的影响
S2 p h 2R
地球曲率的影响:
s2 p1 2R
大气折光的影响:
球气差的综合Leabharlann 响:r1 p1 f1 s2 (1 K ) 2R
素的影响,从而给竖角测定带来误差。
3.大气折光系数 K 大气折光系数K与观测条件
密切相关,随地区、气候、季节
及地面覆盖物和视线离地面高度 等条件不同而不同。
由于折光系数的不确定性,使球气差
改正之后仍具有误差。但如果能在短时间
内,在两点间进行对向观测,并取高差绝
对值的平均值,可以使其影响相互抵消一
三角高程测量原理及公式

三角高程测量原理及公式在三角高程测量中,经常使用的仪器是全站仪和电子经纬仪。
测量步骤一般包括:设置测站、放点、观测角度、观测距离等。
水平仪原理:水平仪是一种能够检测和测量水平面的仪器。
其原理是利用液体的重力、表面张力和液面与气泡的位置关系,来确定平面的水平度。
通过测量水平仪的指示,可以帮助确定测站点的水平位置。
水准仪原理:水准仪是一种测量仪器,用于测量水平面的相对高差。
它基于物体借助重力在水平面上的运动原理。
水准仪中的测量原理包括视线法、反射法和导线法等。
在三角高程测量中,常常使用视线法,即通过望远镜观测圆n上一点的高差与水平视线的仰角。
全站仪原理:全站仪是一种同时具备测量角度和测量距离功能的仪器。
它的原理是通过发射一个激光束或红外线,并利用光电传感器接收反射光束,测量出测站点到观测点的距离和方向。
通过测量不同测站点到同一观测点的距离,以及观测点与测站点之间的角度,可以计算出观测点的高程。
余弦定理:在一个三角形中,根据余弦定理可得:c^2 = a^2 + b^2 - 2ab·cosC正弦定理:在一个三角形中,根据正弦定理可得:a/sinA = b/sinB = c/sinC高程差公式:当在一个测点上测出一物体的仰角和水平观测距离时,利用三角形的几何关系可以推导出高程差公式:h = d·sinα其中,h为物体的高程差,d为测站点到物体的水平距离,α为测站点到物体垂线与水平线之间的夹角。
综上所述,三角高程测量是一种通过测量三角形的边长和角度来推导出物体高程信息的测量方法。
其原理基于几何关系和三角函数的运算。
在实际测量中,需要使用水平仪、水准仪或全站仪等仪器,并通过测量角度和距离,应用余弦定理、正弦定理和高程差公式等公式,进行测量计算。
三角高程测量的计算公式
三角高程测量的计算公式三角高程测量是地理测量中常用的一种方法,用于测量地面上的点的高程。
本文将介绍三角高程测量的计算公式,并解释其原理和应用。
三角高程测量是基于三角法原理的一种测量方法。
它利用三角形的一些特性和测量数据,通过计算可以得到被测点的高程。
三角高程测量适用于各种地形条件,无论是平原、山地还是高原,都可以通过三角高程测量来确定各个点的高程。
三角高程测量的计算公式如下:h = H + d * tan(a)其中,h表示被测点的高程,H表示参考点的高程,d表示两个测点之间的水平距离,a表示两个测点之间的夹角。
根据这个公式,我们可以通过测量参考点和被测点之间的距离和夹角,再加上参考点的高程,就可以计算出被测点的高程。
这个公式的原理是基于三角形的相似性原理,即两个三角形的对应边的比例相等。
在实际测量中,我们首先需要选择一个参考点,可以是已知高程的点或者固定测量设备的位置。
然后,利用测量仪器测量参考点和被测点之间的水平距离和夹角。
最后,根据测量数据和计算公式,我们可以计算出被测点的高程。
三角高程测量在地理测量中具有广泛的应用。
它可以用于绘制地形图、制作地图、建筑工程设计等。
通过三角高程测量,我们可以快速准确地确定地面上各个点的高程,为地理信息系统的建设和规划提供重要的数据支持。
在实际应用中,三角高程测量需要考虑一些误差因素。
例如,测量仪器的精度、天气条件、地形复杂度等都会对测量结果产生影响。
因此,在测量过程中要注意选择合适的测量仪器、控制测量误差,并进行合理的数据处理和分析。
三角高程测量是一种常用的地理测量方法,通过测量参考点和被测点之间的距离和夹角,再结合计算公式,可以准确地确定被测点的高程。
它在地理信息系统、地形图制作、建筑工程设计等领域具有重要的应用价值。
在实际应用中,我们需要注意测量误差的控制和数据处理,以提高测量结果的精度和可靠性。
通过三角高程测量,我们可以更好地了解地球表面的地形特征,为人类的生活和发展提供有益的信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§4-6三角高程测量
一、三角咼程测量原理及公式
在山区或地形起伏较大的地区测定地面点高程时,采用水准测量进行高程测量一般难以进行,故实际工作中常采用三角高程测量的方法施测。
传统的经纬仪三角高程测量的原理如图4 —12所示,设A点高程及AB两点间的距离已知,求B点高程。
方法是,先在A点架设经纬仪,量取仪器高i ;在B点竖立觇标(标杆),并量取觇标高L,用经纬仪横丝瞄准其顶端,测定竖直角3,则AB两点间的高差计算公式为:
故'「一「』十 A 十(4-11 )
式中二为A、B两点间的水平距离
图4-12三角高程测量原理
当A、B两点距离大于300m时,应考虑地球曲率和大气折光对高差的影响,所加的改正数简称为两差改正:
设c为地球曲率改正,R为地球半径,则c的近似计算公式为:-
y ——0.014 —设g为大气折光改正,则g的近似计算公式为:’
因此两差改正」为:2尺,孑恒为正值。
采用光电三角高程测量方式,要比传统的三角高程测量精度高,因此目前生产中的三角高程测量多采用光电法。
采用光电测距仪测定两点的斜距S,则B点的高程计算公式为:
12)
- 二_ 匚I _ ' ---------- -- (4
-
为了消除一些外界误差对三角高程测量的影响,通常在两点间进行对向观测,即
测定hAB和hBA,最后取其平均值,由于hAB和hBA反号,因此」可以抵销
实际工作中,光电三角高程测量视距长度不应超过1km,垂直角不得超过15°。
理论分析和实验结果都已证实,在地面坡度不超过8度,距离在1.5km 以内,采取一定的措施,电磁波测距三角高程可以替代三、四等水准测量。
当已知地面两点间的水平距离或采用光电三角高程测量方法时,垂直角的观测精度是影响三角高程测量的精度主要因素。
二、光电三角高程测量方法
光电三角高程测量需要依据规范要求进行,如《公路勘测规范》中光电三角高程测量具体要求见表4-6
表4-6光电三角高程测量技术要求
注:表4-6中二为光电测距边长度
对于单点的光电高程测量,为了提高观测精度和可靠性,一般在两个以上的已知高程点上设站对待测点进行观测,最后取高程的平均值作为所求点的高程。
这种方法测量上称为独立交会光电高程测量。
光电三角高程测量也可米用路线测量方式,其布设形式同水准测量路线完全一样。
1 .垂直角观测
垂直角观测应选择有利的观测时间进行,在日出后和日落前两小时内不宜观测。
晴天观测时应给仪器打伞遮阳。
垂直角观测方法有中丝法和三丝法。
其中丝观测法记录和计算见表4-7。
表4-7中丝法垂直角观测表
点名泰山等级四等
天气晴观测吴明
成像清晰稳定仪器Laica702 全站仪记录李平
仪器至标石面高1.553m1.554 平均值1.554m 日期200631
注:规范要求四等光电三角高程计算时垂直角应取至0.1
2 .四等光电三角高程测量
米用全站仪进行四等光电三角高程路线测量作业过程如下:
(1)在测站上架设适当测距精度和测角精度的全站仪,在待测点上架设反光镜觇牌,四等光电三角高程需要用量杆在观测前后两次精确量取仪器高和棱镜高,取值精确到1mm,两次量取较差不大于2mm 时取平均值。
(2)往、返测距和测角,垂直角观测采用J2级仪器,中丝法3个测回。
测回间垂直角互差和指标差均不得大于7〃。
(3)依照式(4-12 )计算相邻点间的往、返高差,其高差的互差(应考虑球气
差的影响)不得大于±40・'■ (mm ) (D为测距边边长,以公里为单位)。
附和路
线或环形闭合差不得大于±20(mm )。
若往返高差的绝对值之差满足精度要求,就取平均数作为两点间的高差,符号以往测高差为准。
(4)依照水准路线测量平差方法进行平差计算,最后求得各待定点的高程。
高程应取至1mm。
三、三角高程测量内业计算
对于图根级控制测量,三角高程测量的精度一般规定为每段往返测所得的高差- i (经两差改正后)不应大于0.1D (m)(D为边长,以km为单位),即二容=±0.1D
(m )。
由对向观测所求得的高差平均值来计算路线闭合差应不大于'■'' ■ m 图4-13为某一图根控制网示意图,三角高程测量观测结果列于图上,下画线数
据表示往测。
高差的计算和闭合差调整见表4-8和表4-9。
图4-13三角高程测量观测成果图
表4-8三角高程测量高差计算表
表4-9二角咼程测量路线计算表。