方位角的计算方法
两点方位角计算公式
两点方位角计算公式以两点方位角计算公式为标题,写一篇文章,要求符合标题内容,不少于300字方位角是指从某一点出发,以正北方向为基准,逆时针旋转的角度,到达另一点的方向。
在实际应用中,我们常常需要计算两点之间的方位角,以便确定方向和位置。
本文将介绍两点方位角的计算公式及其应用。
两点方位角的计算公式如下:tanθ = sin(ΔL) / (cos(φ1) * tan(φ2) - sin(φ1) * cos(ΔL))其中,θ为两点之间的方位角,ΔL为两点经度差,φ1和φ2为两点的纬度。
这个公式的推导过程比较复杂,不在本文的讨论范围内。
我们只需要知道如何使用这个公式来计算两点之间的方位角即可。
假设我们要计算A点(40.7128°N, 74.0060°W)到B点(37.7749°N, 122.4194°W)的方位角。
首先,我们需要将经纬度转换为弧度:φ1 = 40.7128° * π / 180 = 0.7102 radφ2 = 37.7749° * π / 180 = 0.6598 radΔL = (122.4194° - 74.0060°) * π / 180 = 0.8727 rad将这些值代入公式中,得到:tanθ = sin(0.8727) / (cos(0.7102) * tan(0.6598) - sin(0.7102) * cos(0.8727))θ = 1.768 rad = 101.3°因此,A点到B点的方位角为101.3°,即从A点出发,顺时针旋转101.3°后到达B点的方向。
两点方位角的应用非常广泛,例如在航海、航空、地图制作等领域都有重要的应用。
在航海中,船舶需要根据两点方位角确定航向,以便到达目的地。
在航空中,飞机需要根据两点方位角确定飞行方向,以便安全到达目的地。
在地图制作中,我们需要根据两点方位角确定地图上两点之间的方向和距离。
测量学坐标方位角怎么算出来的
测量学坐标方位角的计算方法测量学中,坐标方位角是指从某个参考方向(通常为正北方向)顺时针旋转到目标方向的角度。
它在地理测量、建筑测量、地理信息系统等领域都有重要应用。
本文将介绍在测量学中,如何计算坐标方位角。
1. 定义测量学坐标方位角是一个以参考方向为起点,顺时针旋转一定角度后指向目标方向的角度值。
通常以度为单位表示,范围为0°-360°。
2. 计算方法2.1 孤立观测法孤立观测法是一种简单但常用的求取方位角的方法。
假设在平面坐标系中,A 点的坐标为(x1, y1),B点的坐标为(x2, y2)。
为了计算A点到B点的坐标方位角,可以按照以下步骤进行:1.计算两点间的水平距离,即dx = x2 - x1;2.计算两点间的垂直距离,即dy = y2 - y1;3.利用反正切函数求取坐标方位角,即angle = atan(dy / dx)。
需要注意的是,使用反正切函数时需要考虑象限问题。
具体来说,如果dx为正,dy为负,则angle应为360° + angle;如果dx为负,则angle应为180° + angle。
2.2 方位角变换法方位角变换法适用于已知一点的坐标和该点到另一点的坐标距离和方位角,来求取另一点的坐标。
假设A点的坐标为(x1, y1),已知A点到B点的距离为d,方位角为α,则可以按照以下步骤进行:1.将方位角转换为弧度制,即将α转换为α’ = α * π / 180;2.计算B点的x坐标,即xB = x1 + d * sin(α’);3.计算B点的y坐标,即yB = y1 + d * cos(α’)。
2.3 坐标旋转法坐标旋转法适用于已知一点的坐标、方位角和该点到另一点的距离,来求取另一点的坐标。
假设A点的坐标为(x1, y1),已知A点到B点的距离为d,方位角为α,则可以按照以下步骤进行:1.将方位角转换为弧度制,即将α转换为α’ = α * π / 180;2.计算B点的x坐标,即xB = x1 + d * cos(α’);3.计算B点的y坐标,即yB = y1 + d * sin(α’)。
方位角计算公式范文
方位角计算公式范文方位角是指从一个参考方向(通常是正北方向)起,按顺时针方向测量到其中一方向线的角度。
方位角通常用度数表示,范围从0度到360度。
下面介绍常见的方位角计算公式:1.方位角计算公式(两点坐标):假设已知起点坐标A(x1,y1)和终点坐标B(x2,y2),方位角θ的计算公式如下:θ = atan2(y2 - y1, x2 - x1)其中,atan2函数是一个双变量反正切函数,返回值为[-π, π]之间的角度值。
注意:上述公式计算得到的θ是以正北方向为参考的方位角。
如果要将方位角转换为以其他方向为参考的角度(如正东方向为0度),可以将θ减去相应的修正值。
2.方位角计算公式(两点经纬度):假设已知起点的经度(lon1)、纬度(lat1)和终点的经度(lon2)、纬度(lat2),方位角θ的计算公式如下:θ = atan2(sin(Δlon) * cos(lat2), cos(lat1) * sin(lat2) -sin(lat1) * cos(lat2) * cos(Δlon))其中,Δlon = lon2 - lon1是两点经度差。
注意:上述公式计算得到的θ是以正北方向为参考的方位角。
如果要将方位角转换为以其他方向为参考的角度(如正东方向为0度),可以将θ减去相应的修正值。
3.方位角计算公式(方向余弦矩阵):方向余弦矩阵(Direction Cosine Matrix)是一种将方位角和俯仰角等转化为三维空间坐标旋转的方式。
方向余弦矩阵的计算公式如下:D=[ cos(θ) * cos(φ), sin(θ) * cos(φ), -sin(φ) ][ -sin(θ), cos(θ), 0 ][ cos(θ) * sin(φ), sin(θ) * sin(φ), cos(φ) ]其中,θ是方位角,φ是俯仰角。
D是一个3行3列的矩阵,表示坐标变换矩阵。
上述是常见的方位角计算公式,根据不同的应用场景和问题,可能还会有其他的计算公式。
方位角计算公式
辅助 计算
点名 2 BM1 1
2
3
BM2
测站数 3 8 3 4 5
20
表 2-2 附合水准路线计算
观测高差 /m
改正数 /m
改正后高差 /m
4
5
6
+8.364
- 0.014
+8.350
- 1.433
- 0.005
- 1.438
- 2.745
- 0.007
- 2.752
+4.661
- 0.008
+4.653
+ 8.847
- 0.034
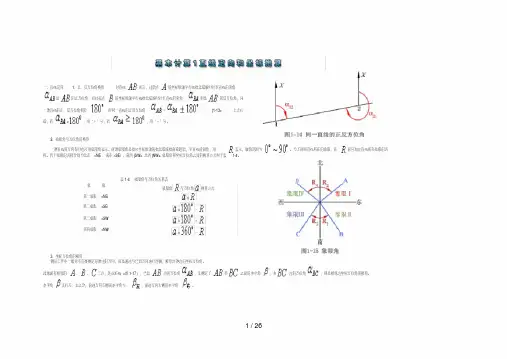
一、直线定向
1、正、反方位角换算
对直线
而言,过始点
的坐标纵轴平行线指北端顺时针至直线的夹角
是
的正方位角,而过端点
的坐标纵轴平行线指北端顺时针至直线的夹角
则是
的反方位角,同
一条直线的正、反方位角相差
,即同一直线的正反方位角
=
(1-13>
上式右
端,若
<
,用“+”号,若
,用“-”号。
2、象限角与方位角的换算
算
各
待
定
点
的
高
程
。
如上 所述,闭 合水准 路线的 计算方法除高差 闭合差 的计算有 所区别 而外,其余与附 合路线 的计算 完全相 同。
二
、
举
例
1.
附
合
水
准
路
线
算
例
5 / 26
下图 2-18 所示附合水准路线为例,已知水准点 A 、 B 和待定点 1、2、3 将整个路线分为四个测段。
测段号 1 1 2 3
方位角的计算方法
方位角的计算方法:(已知方位角+水平角大于540°-540°)已知方位角+水平角±180°=方位角坐标增量的计算方法:平距×COS方位角=△X坐标增量平距×Sin方位角=△Y坐标增量坐标的计算方法:已知X坐标±△X坐标增量=X坐标已知Y坐标±△Y坐标增量=Y坐标高差、平距的计算方法:斜距×Sin倾角=高差斜距×COS倾角=平距高差÷Sin倾角=斜距平距÷cos已知度分秒=斜距高程的计算方法:已知高程-仪器高+前视高±高差=该点的顶板高差原始记录计算方法:前视-后视相加÷2=水平角(前视不够-后视的+360°再减)后视 00°00′00″ 180°00′09″前视92°49′02″272°49′13″水平角= 92°49′03″实测倾角:正镜-270°倒镜-90°(正、倒镜相加-360°)实例: 110°30′38″-90°= 00°30′38″实例: 270°30′38″-270°= 00°30′38″激光的计算方法:两点的高程相减:比如:5点高程1479、479-4点高程1471、052 = 8、427 两点之间的平距:60、673×tan7°19′25″=7、7988、427-7、797=0、629(上山前面的点一定高于后面的点,所以前面的点减后面的点)测量:1、先测后视水平角:归零,倒镜180°不能误差15′2、前视:先测水平角并读数记录,然后倒镜测倾角,水平角、平距、斜距、高差、量出仪器高,前视量出前视高。
要求方位角-已知方位角±180°=拨角方位画两千的图:展点用0.6正好.倾角的计算方法:180°以下的-90°270°-超过180°的两点的高差除平距按tan=倾角比如:2点1500、026-6点1484、096=15、932点~6点平距=127、8315、93÷127、83=接按第二功能键、接按tan接按=接按度分秒键完事。
测量学中坐标方位角计算公式
测量学中坐标方位角计算公式在测量学中,坐标方位角是用于描述目标物体或点在水平坐标系中的方向的数值。
坐标方位角是指从北方向顺时针旋转到目标点所需的角度。
在实际的测量工作中,计算坐标方位角是非常重要的,它可以帮助测量员准确地确定目标点在地图上的位置。
计算公式计算坐标方位角的主要公式是使用三角函数来实现的。
具体的计算公式如下:方位角 = arctan((Y2 - Y1) / (X2 - X1))在上述公式中,X1和Y1表示起点的水平坐标值,X2和Y2表示终点的水平坐标值。
arctan表示反正切函数,它可以将斜率转化为角度值。
通过使用这个计算公式,我们可以得到起点和终点之间的坐标方位角。
需要注意的是,上述公式仅适用于计算水平平面上的坐标方位角。
如果需要在垂直平面上计算坐标方位角,我们还需要考虑高程的影响。
在这种情况下,计算公式会稍有不同,需要引入高程差的概念。
示例为了更好地理解坐标方位角的计算过程,我们可以通过一个示例来说明。
假设我们有两个点A和B,它们的水平坐标分别为:点A:(X1, Y1) = (100, 200)点B:(X2, Y2) = (150, 280)现在我们来计算点A和点B之间的坐标方位角。
首先,我们将点A和点B的坐标值代入计算公式中:方位角 = arctan((280 - 200) / (150 - 100))接下来,我们计算分子和分母的差值:方位角 = arctan(80 / 50)然后,我们计算这两个差值的比值:方位角 = arctan(1.6)最后,使用反正切函数来计算坐标方位角的数值:方位角≈ 56.31°所以,根据计算结果,点A和点B之间的坐标方位角约为56.31°。
结论测量学中的坐标方位角是用于描述目标物体或点在水平坐标系中方向的数值。
通过使用三角函数计算公式,我们可以准确地确定起点和终点之间的坐标方位角。
在计算时需要注意坐标值的顺序和差值的计算方法。
通过实际的计算示例,我们可以更好地理解和应用坐标方位角的计算公式。
方位角计算公式
⽅位⾓计算公式⼀、直线定向1、正、反⽅位⾓换算对直线⽽⾔,过始点的坐标纵轴平⾏线指北端顺时针⾄直线的夹⾓是的正⽅位⾓,⽽过端点的坐标纵轴平⾏线指北端顺时针⾄直线的夹⾓则是的反⽅位⾓,同⼀条直线的正、反⽅位⾓相差,即同⼀直线的正反⽅位⾓= (1-13)上式右端,若<,⽤“+”号,若,⽤“-”号。
2、象限⾓与⽅位⾓的换算⼀条直线的⽅向有时也可⽤象限⾓表⽰。
所谓象限⾓是指从坐标纵轴的指北端或指南端起始,⾄直线的锐⾓,⽤表⽰,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。
象限⾓和坐标⽅位⾓之间的换算公式列于表1-4。
表1-4 象限⾓与⽅位⾓关系表3、坐标⽅位⾓的推算测量⼯作中⼀般并不直接测定每条边的⽅向,⽽是通过与已知⽅向进⾏连测,推算出各边的坐标⽅位⾓。
设地⾯有相邻的、、三点,连成折线(图1-17),已知边的⽅位⾓,⼜测定了和之间的⽔平⾓,求边的⽅位⾓,即是相邻边坐标⽅位⾓的推算。
⽔平⾓⼜有左、右之分,前进⽅向左侧的⽔平⾓为,前进⽅向右侧的⽔平⾓。
设三点相关位置如图1-17()所⽰,应有=++ (1-14)设三点相关位置如图1-17()所⽰,应有=++-=+- (1-15)若按折线前进⽅向将视为后边,视为前边,综合上⼆式即得相邻边坐标⽅位⾓推算的通式:=+(1-16)显然,如果测定的是和之间的前进⽅向右侧⽔平⾓,因为有=-,代⼊上式即得通式=- (1-17)上⼆式右端,若前两项计算结果<,前⾯⽤“+”号,否则前⾯⽤“-”号。
⼆、坐标推算1、坐标的正算地⾯点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标⽅位⾓和⼀个端点的坐标,计算直线另⼀个端点的坐标的⼯作。
如图1所⽰,设直线AB的边长DAB和⼀个端点A的坐标XA、YA为已知,则直线另⼀个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
测量方位角计算公式
测量方位角计算公式测量方位角是指通过其中一种方法求得一些目标物体相对于指定基准方向的角度。
方位角通常使用度数表示,以正北方向为基准,沿顺时针方向递增,范围为0到360度。
测量方位角在地理导航、测量工程、天文学等领域有着广泛的应用。
计算方位角的公式主要有以下几种:1. 方位角 = atan((E - E0) / (N - N0))其中,E、N为目标物体的东北坐标,E0、N0为基准点的东北坐标。
该公式适用于平面坐标系。
2. 方位角 = atan2(E - E0, N - N0)其中,E、N为目标物体的东北坐标,E0、N0为基准点的东北坐标。
该公式适用于平面坐标系,可以通过atan2函数直接得到方位角,避免了先计算斜率再反求角度的过程。
3. 方位角= atan((sin(ΔL) * cos(L2)) / (cos(L1) * sin(L2) - sin(L1) * cos(L2) * cos(ΔL)))其中,ΔL为目标物体经度减去基准点经度的差值,L1、L2分别为目标物体和基准点的纬度。
该公式适用于地理坐标系。
4. 方位角= arc tan((sin(Δλ) * cos(φ2)) / (cos(φ1) *sin(φ2) - sin(φ1) * cos(φ2) * cos(Δλ)))其中,Δλ为目标物体经度减去基准点经度的差值,φ1、φ2分别为目标物体和基准点的纬度。
该公式适用于地理坐标系,常用于计算大地方位角。
这些公式的推导及原理比较复杂,涉及到三角学和二元一次方程等知识。
在实际应用中,可以通过使用现成的工具或软件来计算方位角,如地图软件、GPS定位设备等。
这些工具会自动计算目标物体相对于基准方向的角度,准确性高、方便快捷,可以满足大部分测量需要。
需要注意的是,测量方位角是基于特定坐标系的,不同坐标系的方位角计算公式可能有所不同。
另外,由于地球是一个球体,使用平面坐标系进行测量会引入一定的误差,尤其是在较长的距离范围内。
方位角的计算方法
方位角的计算方法方位角是指在平面直角坐标系中,特定点与正方向x轴之间逆时针方向的夹角。
它在数学、地理、航空航天等领域中都有广泛的应用。
计算方位角的方法主要有以下几种:1.基于直角坐标系的计算:假设有两个点A(x1, y1)和B(x2, y2),首先需要计算出两点之间的直线斜率k = (y2 - y1) / (x2 - x1)。
然后利用反正切函数,通过求解arctan(k)得到弧度值θ。
最后利用单位换算,将弧度值θ转化为角度值α=θ * 180 / π,即为所求的方位角。
2.基于极坐标系的计算:在极坐标系中,一个点可以通过距离r和极角θ来表示。
假设有两个点A(r1,θ1)和B(r2,θ2),要计算两点之间的方位角,首先需要将两点的极角θ转化为弧度制,然后通过计算Δθ=θ2-θ1得到两点之间的相对角度。
最后利用单位换算,将相对角度Δθ转化为角度值α=Δθ*180/π,即得到方位角。
3.基于方向向量的计算:假设有两个点A(x1, y1)和B(x2, y2),可以将两点之间的连线看作一个方向向量。
首先需要计算出两点之间的方向向量V(x2 - x1, y2 - y1)。
然后利用反正切函数,通过求解arctan(Vy / Vx)得到弧度值θ。
最后利用单位换算,将弧度值θ转化为角度值α=θ * 180 / π,即为所求的方位角。
需要注意的是,在计算方位角时,可能会遇到特殊情况,例如:-当两点在同一直线上时,方位角为0或180度;-当两点重合时,方位角没有定义。
总结起来,方位角的计算方法有基于直角坐标系、极坐标系和方向向量三种方法,根据具体情况选择适合的方法进行计算。
方位角计算详细方法
方位角计算详细方法方位角是指物体相对于观察者的方向。
在地理学和航海学中,方位角通常用于描述一点相对于北方的方向。
在天文学中,方位角通常用于描述一个天体相对于天球上的其他天体或地平线的方向。
在航海学中,方位角通常使用360度制表示,其中0度表示北方,90度表示东方,180度表示南方,270度表示西方。
在天文学中,方位角通常使用360度制或24小时制,其中0度或0小时表示地平线上的点,90度或6小时表示东方的点,180度或12小时表示南方的点,270度或18小时表示西方的点。
方位角的计算通常涉及到三个参数:观察者的位置、目标物体的位置和参考方向。
下面是方位角计算的详细方法:1.确定观察者的位置:方位角的计算需要知道观察者的经度和纬度坐标。
这可以通过使用全球定位系统(GPS)或地图上的经纬度线来确定。
2.确定目标物体的位置:类似地,需要知道目标物体的经度和纬度坐标。
这可以通过使用GPS或地图来确定。
3.确定参考方向:方位角的计算需要一个参考方向作为起点。
这可以是北方、南方、东方或西方。
通常情况下,北方被选为参考方向,其中北方的方位角为0度(360度制)或0小时(24小时制)。
4.计算目标物体相对于观察者的经度差和纬度差:将目标物体的经度减去观察者的经度,得到经度差。
将目标物体的纬度减去观察者的纬度,得到纬度差。
5.计算方位角:使用三角函数(如正切函数)计算经度差和纬度差的比值。
根据参考方向的选择,可以使用不同的计算公式。
以下是一些常用的计算公式:- 如果参考方向是北方,则方位角可以通过以下公式计算:方位角 = arctan(经度差/纬度差)。
- 如果参考方向是南方,则方位角可以通过以下公式计算:方位角 = 180度 - arctan(经度差/纬度差)。
- 如果参考方向是东方,则方位角可以通过以下公式计算:方位角 = 90度 - arctan(纬度差/经度差)。
- 如果参考方向是西方,则方位角可以通过以下公式计算:方位角 = 270度 + arctan(纬度差/经度差)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
方位角的计算方法:(已知方位角+水平角大于540°-540°)已知方位角+水平角±180°=方位角
坐标增量的计算方法:
平距×COS方位角=△X坐标增量
平距×Sin方位角=△Y坐标增量
坐标的计算方法:
已知X坐标±△X坐标增量=X坐标
已知Y坐标±△Y坐标增量=Y坐标
高差、平距的计算方法:
斜距×Sin倾角=高差
斜距×COS倾角=平距
高差÷Sin倾角=斜距
平距÷cos已知度分秒=斜距
高程的计算方法:
已知高程-仪器高+前视高±高差=该点的顶板高差
原始记录计算方法:
前视-后视相加÷2=水平角(前视不够-后视的+360°再减)后视 00°00′00″ 180°00′09″
前视92°49′02″272°49′13″水平角= 92°49′03″
实测倾角:正镜-270°倒镜-90°(正、倒镜相加-360°)实例: 110°30′38″-90°= 00°30′38″
实例: 270°30′38″-270°= 00°30′38″
激光的计算方法:两点的高程相减:
比如:5点高程1479、479-4点高程1471、052 = 8、427 两点之间的平距:60、673×tan7°19′25″=7、798
8、427-7、797=0、629(上山前面的点一定高于后面的点,所以前面的点减后面的点)
测量:1、先测后视水平角:归零,倒镜180°不能误差15′
2、前视:先测水平角并读数记录,然后倒镜测倾角,水平角、平距、斜距、高差、量出仪器高,前视量出前视高。
要求方位角-已知方位角±180°=拨角方位
画两千的图:展点用0.6正好.
倾角的计算方法:180°以下的-90°
270°-超过180°的
两点的高差除平距按tan=倾角
比如:2点1500、026-6点1484、096=15、93
2点~6点平距=127、83
15、93÷127、83=接按第二功能键、接按tan接按=接按度分秒键完事。
等于7°06′12″
斜距×COS倾角=平距
平距÷cos已知度分秒=斜距
比如:127、83÷cos7°06′18″=128.819
平距=斜距×cos7°06′18″=127、83
斜距×sin倾角=高差
比如:128、819×sin7°06′18″=15、93
7°10′23″-7°06′18″= 00°04′05″
斜距128.819×sin倾角00°04′05″= 高差0、153
座标增量计算距离计算方法:
△x座标增量的平方+△y座标增量的平方=再开方就是平距比如:△x座标增量158、557×158、557=25140、322
△y座标增量-负13、673×-负13、673=186、950 25140、322+186、950=25327、272
25327、272开方=159、145这就是计算出来的平距
右半边键盘只出数字:按功能键Fn再按Numlk键完事抄平:
支好架子、找平、设置到90度、找点读数
比如:读数是0、8米。
测下一个点是4、8米,就是4、8米-0、8米=4米您的小学校名是:答案:张老师(126邮箱)
面积=半径×半径×圆周率÷2
周长=圆周率×直径÷2或是周长=2×半径×圆周率÷2
三角形面积:求面积吗(上底+下底)×高÷2
梯形面积:设上底为a,下底为b,高为h
公式:(a+b)×h÷2。