机器人指南车
中国人的一百项发明
中国人的一百项发明中国人的一百项发明1、鼓:公元前2世纪中国人发明了定音鼓。
2、二进位制:相传在公元前3000年伏羲发明了二进位制3、绳索:公元前2800年,中国人已经掌握了创造麻绳的技术。
4、指南针:相传公元前2700年中国的轩辕黄帝发明了指南针。
5、养鱼法:公元前2500年中国人已经懂得养鱼。
6、赤道式天文仪:公元前2400年,中国人发明了赤道式天文仪。
7、十进计数制:中国人于公元前14世纪,发明了十进计数制。
8、印刷术:公元前1324年,中国人已会雕刻印章,用墨水印在文件上。
1040年代中国刻字工人毕升在北京历年间发明了活字印刷术。
1107年,中国人还发明了彩色印刷术。
9、漆――世界第一种塑料:中国人最迟在公元前13世纪已经发明使用了漆。
10、铜镜:约公元前12世纪中国人发明了铜镜。
11、伞:公元前1100年,中国人已经使用伞。
也有人说,公元4世纪三国时期中国人才发明了伞。
12、风筝:公元前1000年,中国人最先放风筝。
风筝飞上天空为飞机飞上天空提供了原理和灵感。
13、米酒:公元前1000年,中国人发明了米酒。
14、弓箭:中国人于公元前8世纪发明了弓箭。
而欧洲的意大利在公元10世纪才使用弓,比我国晚了一千二百年。
15、古代机器人:公元前770年至公元前256年东周时期,中国人就已发明了古代机器人。
16、分行栽培与精细耕地法:公元前6世纪,中国人发明了分行栽培与精细耕地法;欧洲人到1731年才使用此项技术,比中国晚了二千四百年左右。
17、铁犁:公元前6世纪,中国人发明了铁犁。
欧洲人到17世纪才使用铁犁,比中国晚了二千三百年左右。
18、大定音钟:中国人于公元前6世纪发明了大定音钟;欧洲人到公元1000年才有定音钟,比中国晚了一千六百年左右。
19、长明灯:大约在公元前589年,中国人发明了长明灯。
灯蕊为石棉;灯油为海豹油或鲸油。
20、算盘:公元前550年中国人发明了算盘,用于计算。
21、地毯:公元前五百年地毯已在中国应用。
指南车的原理
指南车的原理
指南车是一种用于铁路轨道上的车辆,它具有特殊的设计和原理,使得它能够在铁路轨道上行驶并保持方向稳定。
下面将介绍指南车的原理及其工作原理。
首先,指南车的原理基于轨道的几何特性。
铁路轨道是由两条平行的钢轨组成,它们之间的距离是固定的,这就为指南车提供了一个稳定的轨道。
指南车的轮子被设计成与轨道的轨距相匹配,这样它就能够沿着轨道行驶而不会偏离轨道。
其次,指南车的原理还涉及到车辆的悬挂系统。
指南车通常采用了特殊的悬挂系统,它能够使车辆保持平稳的行驶。
这种悬挂系统通常包括弹簧和减震器,它们能够减少车辆在行驶过程中的颠簸和震动,从而保持车辆的稳定性。
另外,指南车的原理还包括了车辆的转向系统。
指南车通常采用了转向架来实现车辆的转向。
转向架能够使车辆在行驶过程中改变方向,从而保持车辆沿着轨道行驶。
转向架通常由转向架架、转向架轴和转向架轮组成,它们能够使车辆在行驶过程中保持稳定的转向。
最后,指南车的原理还涉及到车辆的动力系统。
指南车通常由内燃机或电动机驱动,它们能够为车辆提供动力,使得车辆能够在铁路轨道上行驶。
动力系统还包括了传动系统,它能够将动力传递给车辆的轮子,从而推动车辆行驶。
综上所述,指南车的原理涉及到轨道的几何特性、车辆的悬挂系统、转向系统和动力系统。
这些原理共同作用,使得指南车能够在铁路轨道上行驶并保持方向稳定。
指南车的原理不仅是铁路运输的基础,也是铁路运输安全和稳定的保障。
希望通过本文的介绍,读者能够更加深入地了解指南车的原理及其工作原理。
ABB机器人【配置设定】大全,人手一份,建议永久收藏!

ABB机器⼈【配置设定】⼤全,⼈⼿⼀份,建议永久收藏!功能介绍指南车机器⼈致⼒于⼯业机器⼈⾃动化应⽤服务,专注⼯业机器⼈应⽤⼯程师(电⽓设计与调试、机械设计、技术营销、离线仿真、视觉、项⽬⽅案、⾼级编程)等培训,与机友们分享技术⼲货及⾏业动态。
本公众号由杭州指南车机器⼈科技有限公司维护运营!限时下载|ABB、FANUC机器⼈的全套学习资料1⼀、如何配置ABB机器⼈Profinet从站1、机器⼈需要有888-2或者888-3选项(使⽤控制器⽹⼝),或者840-3选项(使⽤Anybus⽹⼝)2、此处举例888选项3、机器⼈控制器有如下⽹⼝,其中:X2 是服务端⼝,ip固定192.168.125.1X3连接了⽰教器X7连接了安全板X9连接了轴计算机4、Profinet可以连接WAN⼝或者LAN3⼝,根据设置连接5、此处举例连接WAN⼝6、控制⾯板,配置,主题选择communication8、点击ProfinetNetwork9、修改ip并选择对应⽹⼝10、重启11、控制⾯板,配置,主题I/O ,PROFINET InternalDevice12、配置输⼊输出字节数。
和PLC那边设置⼀致13、配置界⾯下,进⼊Industry Network,PROFINET14、设置station名字,这个名字要和PLC端对机器⼈的station设置⼀样15、添加signal,device选择profinetInternal device2⼆、ABB机器⼈IO接线与配置1、以DSQC652为例(16进16出)2、上部区域为输出16个点,其中9和10针脚的0v,24v需要从柜门旁边的XT31引过来3、下部区域为16个输⼊点,9号针脚的0v需要从XT31引过来4、左侧区域短接⽚为地址位,默认为10,如下图(剪掉的为1,留下的是0,⾼电平有效)。
如果要修改板卡地址,在这⾥修改,机器⼈⾥也要做对应配置5、6、控制⾯板,配置,找到devicenetdevice,添加(如果已经显⽰添加,则不需要再添加)7、模板选择652,地址根据前⾯短接⽚设置,默认为108、确定后,暂时不重启,全部配置完再⼀起重启9、进⼊Signal,点击添加10、举例,⼀个输出设置如下设置name,type选择digital output,assigneddevice选择刚配置好的板卡,设置mapping。
简要描述指南车的工作原理
简要描述指南车的工作原理导航车通常配备有各种传感器,包括激光雷达、摄像头、红外传感器、超声波传感器等,用于感知周围环境的信息。
通过这些传感器收集到的数据,导航车可以实时地获取周围环境的信息,如障碍物的位置和形状、地面的颜色和纹理、自身的位置和朝向等。
这些信息是导航车进行定位、路径规划和避障的基础。
导航车的控制器是其核心部件,其中包括主控制单元、驱动系统、电源管理系统等。
主控制单元是导航车的大脑,负责协调传感器的数据、执行导航算法、控制车辆的运动等。
驱动系统包括电机、电池、轮子等,用于实现导航车的移动。
电源管理系统则负责管理导航车的电力供应、充电等。
导航车的导航算法是其关键技术之一,主要包括定位和路径规划两部分。
定位算法是指导航车确定自身位置和姿态的方法,常用的技术包括激光定位、视觉定位、惯性导航等。
路径规划算法是指导航车计算从起点到终点的最佳路径的方法,常用的技术包括A*算法、Dijkstra算法、遗传算法等。
通过这些算法的配合,导航车可以高效地规划路径、避开障碍物,并按照预定的路线完成任务。
导航车的工作原理可以简单概括为以下几个步骤:首先,导航车通过传感器感知周围环境的信息,包括地面的颜色、障碍物的位置等;然后,导航车利用定位算法确定自身的位置和朝向;接着,导航车根据路径规划算法计算出最佳路径,并执行运动控制;最后,导航车持续地更新环境信息、定位和路径规划,实现自主的移动和任务执行。
总的来说,导航车是一种利用先进的传感技术和自动控制系统实现自主移动和任务执行的机器人。
它的工作原理主要是通过集成的传感器获取环境信息、控制系统实现定位和路径规划,并利用导航算法实现自主移动和任务执行。
导航车的应用领域广泛,包括工业自动化、服务机器人、物流运输等,具有广阔的发展前景。
中国古代各种机器人
唐代张麓著的《朝 野佥载》一书中, 记载了唐 初时杭州著名的土木 建筑工 匠杨务廉,研制了一个僧人模样的机器 人,它 手端化缘 铜钵,能学 和尚化缘 ,等 到钵中钱满,它就自动收起钱并且向施 主躬身行礼。杭州城中市民争着向此钵 中投钱,来观看这种奇妙的表演。每日 它竞能为主人捞到数千钱,真可谓:别 出心裁,生财有道。
◇
Dn
国
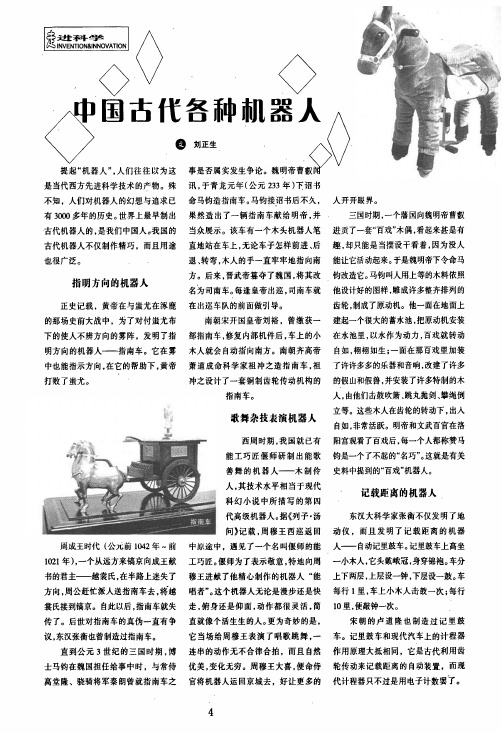
提起“机器人”,人们往往以为这 是当代 西方先进科 学技术的产物 。殊 不知, 人们对机器 人的幻想与追 求已 有3000 多年的历史 。世界上最早 制出 古代机器人的,是我们中国人,我国的 古代机 器人不仅制 作精巧,而且 用途 也很广泛。
指明方向的机器人
正史记 载,黄帝在 与蚩尤在 涿鹿 的那场 史前大战中 ,为了对付蚩 尤布 下的使 人不辨方向 的雾阵,发明 了指 明方向 的机器人— —指南车。它 在雾 中也能指示方向,在它的帮助下,黄帝 打败 了蚩尤 。
事是否属 实发生争论。 魏明帝 讯,于青龙元年( 公元233年) 下诏书 命马钧造指南车。马钧接诏书后不久, 果然造 出了一辆指 南车献给明帝 ,并 当众展示 。该车有一个木头机 器人笔 直地站在车上,无论车子怎样前进、后 退、转弯,木人的手一直牢牢地指向南 方。后来,晋武帝篡夺了魏国,将其改 名为司南车。每逢皇帝出巡,司南车就 在出巡车队的前面做引导。
南朝宋 开国皇帝刘 裕,曾缴 获一 部指南车,修复内部机件后,车上的小 木人就 会自动措向 南方。南朝齐 高帝 萧道成 命科学家祖 冲之造指南车 ,祖 冲之设计 了一套铜制齿轮传动 机构的
指南车。
歌舞杂技表演机器人
西周时期,我国就已有 能工巧匠偃师研制出能歌 善舞的机器人——木制伶 人,其技术水平相当于现代 科幻小说中所描写的第四 代高级 机器人。 据《列子 ·汤 问》记载,周穆王西巡返回 中原途 中。遇见了 一个名叫偃师 的能 工巧匠。偃师为了表示敬意,特地向周 穆王进 献了他精心 制作的机器人 “能 唱者”。这个机器人无论是漫步还是快 走,俯身还是仰面,动作都很灵活,简 直就像个活生生的人。更为奇妙的是, 它当场 给周穆王表 演了唱歌跳舞 ,一 连串的 动作无不合 律合拍,而且 自然 优美,变化无穷。周穆王大喜,便命侍 官将机 器人运回京 城去,好让更 多的
C10系列工业机器人操作说明书

埃夫特智能 ER180-4-3200 工业机器人快速使用手册说明书

2.3.3 机器人控制柜搬运 ..................................................... 16 2.4 安装 .......................................................................... 17
4.3.1 什么是点动操作 ....................................................... 50 4.3.2 点动操作注意事项 ..................................................... 50 4.3.3 开始点动操作 ......................................................... 50 4.3.4 关节坐标系-点动操作 .................................................. 51 4.4 程序操作 ...................................................................... 52 4.4.1 什么是程序操作 ....................................................... 52 4.4.2 程序操作注意事项 ..................................................... 52 4.4.3 开始程序操作 ......................................................... 52 4.5 停机断电 ...................................................................... 54 第 5 章 安装过程中常见故障与排查方法 ............................................ 55
中国古代各种机器人
中国古代各种机器人作者:刘正生来源:《发明与创新(学生版)》2008年第05期提起“机器人”,人们往往以为这是当代西方先进科学技术的产物。
殊不知,人们对机器人的幻想与追求已有3000多年的历史。
世界上最早制出古代机器人的,是我们中国人。
我国的古代机器人不仅制作精巧,而且用途也很广泛。
指明方向的机器人正史记载,黄帝在与蚩尤在涿鹿的那场史前大战中,为了对付蚩尤布下的使人不辨方向的雾阵,发明了指明方向的机器人——指南车。
它在雾中也能指示方向,在它的帮助下,黄帝打败了蚩尤。
周成王时代(公元前1042年~前1021年),一个从远方来镐京向成王献书的君主——越裳氏,在半路上迷失了方向,周公赶忙派人送指南车去,将越裳氏接到镐京。
自此以后,指南车就失传了。
后世对指南车的真伪一直有争议,东汉张衡也曾制造过指南车。
直到公元3世纪的三国时期,博士马钧在魏国担任给事中时,与常侍高堂隆、骁骑将军秦朗曾就指南车之事是否属实发生争论。
魏明帝曹叡闻讯,于青龙元年(公元233年)下诏书命马钧造指南车。
马钧接诏书后不久,果然造出了一辆指南车献给明帝,并当众展示。
该车有一个木头机器人笔直地站在车上,无论车子怎样前进、后退、转弯,木人的手一直牢牢地指向南方。
后来,晋武帝篡夺了魏国,将其改名为司南车。
每逢皇帝出巡,司南车就在出巡车队的前面做引导。
南朝宋开国皇帝刘裕,曾缴获一部指南车,修复内部机件后,车上的小木人就会自动指向南方。
南朝齐高帝萧道成命科学家祖冲之造指南车,祖冲之设计了一套铜制齿轮传动机构的指南车。
歌舞杂技表演机器人西周时期,我国就已有能工巧匠偃师研制出能歌善舞的机器人——木制伶人,其技术水平相当于现代科幻小说中所描写的第四代高级机器人。
据《列子·汤问》记载,周穆王西巡返回中原途中,遇见了一个名叫偃师的能工巧匠。
偃师为了表示敬意,特地向周穆王进献了他精心制作的机器人“能唱者”。
这个机器人无论是漫步还是快走,俯身还是仰面,动作都很灵活,简直就像个活生生的人。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人指南车
作者:
来源:《江苏科技报·E教中国》2018年第02期
学习背景
指南车是中国古代指示方向的一种车辆,中国古籍有“车虽回运而手常指南”的相关记载。
本课尝试借古创今,使用乐高积木搭建创意小车,借助陀螺仪传感器获取小车的旋转角度,在LEGO MINDSTORMS Education EV3编程软件(以下简称“EV3软件”)中利用数学模块、移动槽模块控制小车运行,使其自动转向指定方向。
学生在感受中国古代技术神奇魅力的同时,将创客的教育理念融入具体实际问题的解决过程中,在科学探究中发展学生的实践能力、合作能力和创新意识。
教学目标
知识与技能
1.使用乐高积木设计并搭建一个创意小车。
2.描述陀螺仪传感器的原理和作用。
3.使用陀螺仪传感器采集数值,利用数学模块、移动槽模块实现小车自动转向的控制。
4.使用EV3软件进行程序编写。
过程与方法
1.经历小组合作完成创意小车积木搭建与程序设计的过程。
2.观察分析陀螺仪传感器数值与小车旋转角度的关系。
3.运用阅读资料、自我构思设计、基于学习支架摸索与尝试操作等方法来进行相关内容的自主学习。
情感态度与价值观
1.体验借鉴中国古代指南车的思路,设计现代乐高小车的过程,感受中国古代技术魅力的同时培养创新思维。
2.在小组合作学习中能发挥特长,并积极承担任务,培养合作精神和团队荣誉感。
教学重点与难点
教学重点
1.观察分析陀螺仪传感器数值与小车旋转角度的关系。
2.使用陀螺仪传感器采集数值,利用数学模块、移动槽模块实现小车自动转向的控制。
教学难点
利用陀螺仪传感器模块、数学模块、移动槽模块实现小车自动转向的控制。
教学过程
一、创设情境
指南车是中国古代指示方向的一种车辆,它利用机械传动系统控制车上的木人,无论车子转向何方,木人的手始终指向指南车出发时设置的方向,中国古籍有“车虽回运而手常指南”的相关记载(如图1)。
图1(图片来自网络)
本课以指南车为研究对象,让同学们思考怎样将古代技术思路引入到当今的机器人设计中,开发能自动转回初始方向的乐高小车。
二、需求分析
教师组织学生讨论控制小车能自动转向的关键要素,理解陀螺仪的原理以及在本作品中的作用,并分析驱动小车转向的大致步骤。
三、构思设计
组织学生以小组为单位设计创意小车的草图,并使用乐高积木、陀螺仪传感器、数据线等完成相关组件的搭建与连接。
四、探究新知
教师组织学生以小组为单位将EV3控制器与计算机相连,利用EV3软件观察分析陀螺仪传感器数值与小车旋转角度的关系,大致判断驱动两个电机旋转的参数。
五、编程调试
在前期讨论和观察分析的基础上,教师组织学生小组经历观察现象、发现问题、分析原因、尝试解决等过程,逐步完善程序编写,让学生设计完成符合真实环境的乐高指南车。
六、展示评价
教师组织学生以小组为单位进行作品展示,并向全班同学介绍小组作品特色、设计思路、遇到的问题以及解决的方法,由教师和其他小组一起对作品进行评价。
七、拓展创新
教师提出拓展要求,引导学生对作品进行进一步完善和创新。
案例详解
一、关于乐高小车自动转向的相关讨论
1.需要设定初始角度;
2.需要实时采集小车当前旋转角度的数据;
3.当小车当前角度与初始角度不一致时,持续驱动左右电机让小车原地旋转,直到两个角度一致。
二、陀螺仪传感器的原理、功能与软件模块介绍
陀螺是许多学生玩过的玩具,在一定的初始条件和外在力作用下,陀螺除了不停地自转,同时还会环绕另一个固定的转轴不停地旋转。
人们利用陀螺的力学原理所制成的各种功能的陀螺装置称为陀螺仪,它在科学、技术、军事等各个领域有着广泛的应用。
比如:回转罗盘、定向指示仪、炮弹的翻转等。
乐高EV3中的陀螺仪传感器(如图2)可检测物体的位移、方向和角度以帮助机器人保持平衡或是确定所指的方向,陀螺仪传感器只能检测单个旋转轴的运动,旋转方向通过传感器外壳上的箭头进行指示。
在EV3软件的陀螺仪传感器模块中,可以测量当前值(角度、速率、角度和速率,如图3),或者与设定值(角度、速率)比较,并输出结果(如图4),还可以将陀螺仪重置(如图5)。
图3
图4 图5
三、观察陀螺仪传感器测量数值,分析与小车旋转角度的关系
在乐高小车上加装陀螺仪传感器,传感器接在EV3控制器2号端口(如图6)。
直接在EV3控制器中观察(如图7)。
图6 图7
将EV3控制器连接到电脑,在EV3软件右下角“硬件页面”的“端口查看”选项卡中进行观察(如图8)。
图8
观察分析结论:
角度和速率可以为正数或负数,顺时针旋转为正,逆时针旋转为负,逆时针1周角度数值是-360,逆时针2周角度数值是-720。
注意事项:
乐高陀螺仪传感器的角度可能随时间而“偏移”,导致指向越来越不准确。
建议将EV3的固件升级到最高(作者使用的是V1.09E)。
四、程序设计
根据之前的讨论,设定小车初始角度可通过重置陀螺仪实现(在EV3中陀螺仪传感器的初始方向数值为0);采集小车当前旋转角度的数据可通过陀螺仪传感器的测量角度实现。
当小车当前角度与初始角度不一致时,如果小车偏向逆时针方向,则驱动左右电机让小车顺时针转回初始角度;如果小车偏向顺时针方向,则驱动左右电机让小车逆时针转回初始角度。
小车的原地旋转可以使用数学模块和移动槽模块使左右电机速度互为相反数;角度数据的实时采集以及左右电机在一定条件下的持续工作需要在循环中实现;当小车不断旋转直到测量角度重新为0时,左右电机速度也为0,即小车停止(程序流程如图9)。
图9
五、拓展创新
作品展示交流后,教师给学生一些时间梳理设计思路、完善提升本组作品。
教师也可提出一些拓展任务供学生挑战,如利用“多任务”“等待程序块按钮”等知识,制作可以调整初始方向的小车(即在程序运行中,按一下控制器中心按钮,立即将当前方向设为“0”)。