船用起重机升沉补偿系统建模与仿真
基于Amesim对起重机二次控制主动波浪补偿系统仿真

基于Amesim对起重机二次控制主动波浪补偿系统仿真
罗国善;钟孟;谷文平
【期刊名称】《装备制造技术》
【年(卷),期】2024()2
【摘要】基于实际需求,对起重机二次控制主动波浪补偿系统进行了仿真。
基于一型起重机,对其二次控制主动波浪补偿系统的分析、计算和设计,应用仿真软件Amesim建立起重机各子系统的数学模型,对各子系统进行仿真分析和优化选型,确认其液压系统元件参数。
应用仿真软件Amesim建立整机仿真模型并进行仿真研究,使其在4级的作业海况下,满足升沉方向补偿精度达到95%,为起重机二次控制系统的液压元器件选型提供理论依据,也为起重机系统设计及应用提供依据。
该研究得出的起重机补偿技术能补偿风浪、洋流等复杂海洋环境成的升沉方向上的运动,保证海上补给和精密设备吊装的安全性。
【总页数】8页(P45-52)
【作者】罗国善;钟孟;谷文平
【作者单位】中国船舶集团华南船机有限公司;海装广州局驻梧州地区军事代表室【正文语种】中文
【中图分类】TH69
【相关文献】
1.基于DSP的主动式波浪补偿起重机控制系统设计
2.基于 AMESim 对波浪控制平台电液伺服系统仿真与优化
3.基于AMESim的半主动式升沉补偿系统仿真研究
4.
基于AMESim的海上钻井平台波浪补偿仿真研究5.二次控制波浪补偿绞车系统的建模与仿真
因版权原因,仅展示原文概要,查看原文内容请购买。
复合液压缸式半主动升沉补偿系统建模及仿真
机床 与液压
M ACHI NE TO0L & HYDRAUL I CS
J a n . 2 0 1 3
Vo 1 . 41 No .1
D OI :1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1—3 8 8 1 . 2 0 1 3 . 0 1 . 0 3 9
复合 液 压 缸 式半 主 动 升沉 补 偿 系 统建 模 及仿 真
全伟 才 ,张艾群 ,张竺英
( 1 .中 国科 学院沈 阳 自动 化研 究所机 器人 学 国 家重 点 实验 室 ,辽 宁沈 阳 1 1 0 0 1 6 ; 2 .中国科 学院 大 学 ,北京 1 0 0 0 4 9 )
i m p r o v i n g he t s a f e t y o f h a n d l i n g o f d e e p — s e a r e m o t e l y o p e r a t e d v e h i c l e( R O V)i n h a r s h s e a s t a t e . T h e s e i— m a c i t v e h e a v e c o m p e n s a t i o n
S c i e n c e, S h e n y a ng L i a o ni ng 1 1 0 01 6,Ch i n a;
Байду номын сангаас
2 . G r a d u a t e S c h o o l o f C h i n e s e A c a d e m y o f S c i e n c e ,B e i j i n g 1 0 0 0 4 9 ,C h i n a )
30t28m船用起重机液压系统的设计与仿真分析
30t/28m船用起重机液压系统的设计与仿真分析船用起重机是船舶自备的重要起重设备,其应用对我国远洋运输业的发展、海洋资源的开发以及海洋权益的维护具有重要意义。
液压传动以其独特的优势在船用起重机中的应用日益广泛,按照调速方式的不同,船用起重机液压系统有开式和闭式两种型式。
相比之下,闭式系统效率高,占用空间小,已逐渐成为船用起重机液压系统的主要应用型式。
目前,对于船用起重机闭式系统的综合分析并不多见,且与开式系统的性能比较往往局限于定性分析。
本文分别对30t/28m船用起重机开、闭式液压系统进行了设计及仿真分析,并以起升回路为基础,对其工作过程中启制动时液压系统的流量-压力特性、机械结构的振动冲击等综合性能进行了深入研究,为开、闭式液压系统的实际应用提供了重要参考依据。
设计了30t/28m船用起重机闭式液压系统,对起升、补油控制回路进行了计算选型,完成了液压系统的结构设计。
将起升机构等效为三质量二自由度系统,建立了机械结构和液压系统相耦合的起升系统数学模型,并在仿真平台AMESim中建立了起升回路的仿真模型。
针对船用起重机在最大工作幅度28m,起吊额定载荷30t时系统的静动态特性进行了仿真分析,得到了系统的主要特性曲线。
结果表明:采用闭式液压系统不仅有效提高了系统效率,降低了机械结构的振动冲击,还能对吊重的势能进行回收。
以起升系统为基础,进一步建立了包括变幅、回转及补油控制回路在内的闭式液压系统仿真模型,并对船用起重机在某个典型工作周期内各回路的工作特性进行了仿真分析,得到了系统的综合特性,并分析了各回路之间的性能差异。
在船用起重机机械结构不变的基础上,设计了相应的负载敏感开式液压系统;建立了起升回路的数学模型及仿真模型;并在与闭式系统相同工况下进行了仿真分析。
结果表明:采用负载敏感的开式系统能使泵的输出功率与负载相适应,且调速性能良好;但在系统效率以及功率回收等方面与闭式系统相比存在较大差异。
上述成果对船用起重机开、闭式液压系统的选用以及系统的设计与试验具有重要的参考价值。
一种新型船用起重机综合补偿系统原理及运动学模型

第 1 期
大 连 海 事 大 学 学 报
J o u r n a l o f Da l i a n Ma r i t i me Un i v e r s i t y
Vo 1 . 41 No .1 Fe b .. 2 01 5
2 0 1 5年 2月
文章编号 : 1 0 0 6 - 7 7 3 6 ( 2 0 1 5 ) 0 1 - 0 0 3 7 - 0 5
系统 、 德国 L i e b h e r r 公 司 绞 车 形 式 的升 沉 补 偿
系统 、 荷兰I HC G u s t o 公 司基 于 复合油 缸 和滑轮 组 的升沉 补偿 系 统 . 防摇 系统 主 要 用 于 抑 制 由船 舶
D U J i a — l u , Q I A O We i — l i a n g
c r a n e c o m pr e he ns i v e c o mp e n s a t i o n s ys t e m
W ANG S he n g — ha i ,CHEN Ha i — q ua n ,S UN Yu・ qi ng ,
综合 补偿 系统. 升 沉 补 偿 系 统 主 要 对 船 舶 升沉 进 行 补偿 , 包括 基 于 行 星 齿 轮 减 速 机 构 的升 沉 补 偿
摇、 纵摇 运 动进 行综 合补偿 , 包 括 基 于 马里 兰索 具
h e n s i v e c o mp e n s a t i o n s y s t e m w a s p r o p o s e d . A n a n t i — s w i n g p l a t f o r m wa s i n s t a l l e d u n d e r t h e p e d e s t a l o f o f s h o r e c r a n e S O a s t o k e e p t h e o f f s h o r e c r a n e s t a b l e . Me a n wh i l e t h e h y d r a u l i c
拖体被动升沉补偿系统非线性建模及仿真

拖体被动升沉补偿系统非线性建模及仿真
拖体被动升沉补偿系统是一种非线性的控制系统,它具有复杂的
特征,实施起来也非常困难。
简而言之,这种系统通过浮力、拖力的
相互协调及精确的控制,实现对船舶的位置和航向的控制。
非线性建
模及仿真手段,是用来研究该系统特性、性能及其控制规律的一种重
要方法。
仿真拖体被动升沉补偿系统,首先要建立包括拖体及其他相关元
件的物理模型,用于表示整个系统的质量、动力以及环境影响等因素;其次,要建立一个有效的非线性控制策略模型,用于指导系统的运动;最后,要建立一个浮力和拖力的动力学耦合模型,用于表达拖体的水
动力特性。
在非线性建模及仿真过程中,除了使用传统的工程方法和数值技
术外,还可以利用专门的仿真软件,如 MATLAB/Simulink 仿真,ADAMS 结构分析,ABAQUS 结构分析等,来实现拖体被动升沉补偿系统
的三维仿真。
与传统的数值计算模型相比,这种技术可提供更多的模
拟细节,更好地描述系统特性、动力学效果及行为模式,从而更好地
理解和评估拖体被动升沉补偿系统的性能。
在非线性建模及仿真实践中,还可以根据实测数据和应用部分,
采用正确的设计及分析技术,考虑仿真环境、运动状态、分布特性及
控制策略等要素,进行有效的拖体被动升沉补偿系统技术测试及仿真
评估。
分析结果对于拖体被动升沉补偿系统的项目开发至关重要,为
系统的建造、安装和使用提供重要参考。
基于Adams-AMESim的平台吊机升沉补偿系统联合仿真技术

基于Adams-AMESim的平台吊机升沉补偿系统联合仿真技术杨诚;邓智勇;高磊;唐国元【摘要】利用Adams的虚拟样机弥补AMESim的不足,建立基于Adams-AMESim的虚拟样机联合仿真模型,完成主被动一体式平台吊机升沉补偿系统的联合仿真,不同波浪条件下的仿真结果表明该系统具有很好的补偿效果,波浪频率对补偿效果的影响较大,说明基于Adams-AMESim的联合仿真系统能够可靠实现多领域联合仿真,可以为海上平台吊机升沉补偿系统的分析提供良好的虚拟试验平台.【期刊名称】《船海工程》【年(卷),期】2014(043)006【总页数】5页(P137-141)【关键词】升沉补偿;Adams;AMESim;联合仿真【作者】杨诚;邓智勇;高磊;唐国元【作者单位】武汉第二船舶设计研究所,武汉430064;武汉第二船舶设计研究所,武汉430064;华中科技大学船舶与海洋工程学院,武汉430074;华中科技大学船舶与海洋工程学院,武汉430074【正文语种】中文【中图分类】U674.38海上平台在海上吊装起重作业时,波浪升沉运动会给作业带来很多困难和安全隐患,这就需要升沉补偿设备进行辅助作业。
国外对于升沉补偿系统的研究较早[1],国内也有不少此类研究文章,文献[2]和[3]分别提出在不同应用系统下的升沉补偿装置,并利用AMESim软件进行仿真验证。
虽然AMESim能完成液压系统和控制系统的分析,但对系统运动学和动力学的分析能力较弱,在系统运动学和动力学分析仿真领域中通常选用Adams软件进行基于虚拟样机的仿真分析[4]。
因此考虑利用Adams建立虚拟样机完成平台吊机升沉补偿系统的运动学和动力学分析,并将虚拟样机与AMESim中的液压系统和控制系统结合起来,实现机-电-液多领域的联合仿真,提高建模效率,降低开发成本,得到更好的仿真结果[5]。
基于主被动一体式海上平台吊机升沉补偿系统,利用Adams和AMESim分别建立虚拟样机系统和液压控制系统,通过仿真接口完成交互计算,实现联合仿真。
深海采矿波浪升沉补偿系统控制方法研究及建模仿真

深海采矿波浪升沉补偿系统控制方法研究及建模仿真随着陆地矿产资源的日益开采,陆地矿产资源越来越少,开采深海矿产资源变得尤为重要。
大力发展深海技术,才能维护我国开采深海矿产资源的应有权益。
深海采矿装置波浪升沉补偿系统是保证深海采矿作业安全进行必不可少的装备之一。
在深海采矿过程中,海浪引起采矿船升沉运动,如果在采矿船和扬矿管之间没有设置升沉补偿系统,扬矿管将受到很大的轴向应力,造成扬矿管疲劳损坏、变形甚至断裂,因此有必要在采矿船和扬矿管之间设置一套波浪补偿系统,本文称之为下波浪升沉补偿系统。
在采矿设备的布放或回收过程中,为了配合下波浪升沉补偿系统的工作,必须增加一套波浪升沉补偿系统来保证即将布放或回收的采矿设备和已经布放的采矿设备的同步对接,本文称之为上波浪升沉补偿系统。
由于深海矿产资源的开采受制于海洋复杂多变的环境,因此波浪补偿系统的研究,不可能像陆地上那样方便地进行一系列实物试验。
基于虚拟样机技术的仿真研究可为波浪升沉补偿系统的研制和试验提供理论依据和技术参考。
升沉补偿系统控制方法的研究可为系统工作时选择控制策略提供理论参考。
这些研究能有效地缩短研究周期、降低开发风险、提高设计质量。
本课题研究内容可分为以下几个部分:1)分析1000m海试采矿装置升沉补偿装置系统方案及海试环境,提出双波浪升沉补偿系统(上波浪升沉补偿系统和下波浪升沉补偿系统),并合理简化系统的工作条件,确定系统参数。
2)选择试验船,设计双波浪升沉补偿系统的物理结构,分析船体在海浪中的受力情况,建立双波浪升沉补偿系统的数学模型。
3)探讨双波浪升沉补偿系统控制方法和控制策略,建立控制系统模型。
4)建立双波浪升沉补偿系统虚拟样机,对布放或回收采矿设备时的双波浪升沉补偿系统同步对接及采矿作业时的下波浪补偿进行过程模拟和动力学仿真分析。
新型升沉补偿试验系统的仿真设计
摘 要: 为能更准确地对 波浪升沉补偿系统进行研究 , 设计一种基于数字液压技术 的新 型试 验系统 , 采用
Se r 平台结构模拟船舶 的六 自由度 运动 , twat 以数 字液 压缸 作为驱 动器 对重 物升沉 进行 补偿 。在 L b E a VI W 仿真环境下运 用广义预测与 P D控制策 略, I 实现 了对升沉补偿试 验系统 的设 计 。结果 表 明, 系统仿 真相似 该
标 系 下 , 采 用 RPY(ol i hy w) 描 述 。 拟 r l pt - a 角 — c
构形 式 具 有 结 构 布局 合 理 、 度 高 、 度 大 、 动 精 刚 运 速度 高 的特 点 。
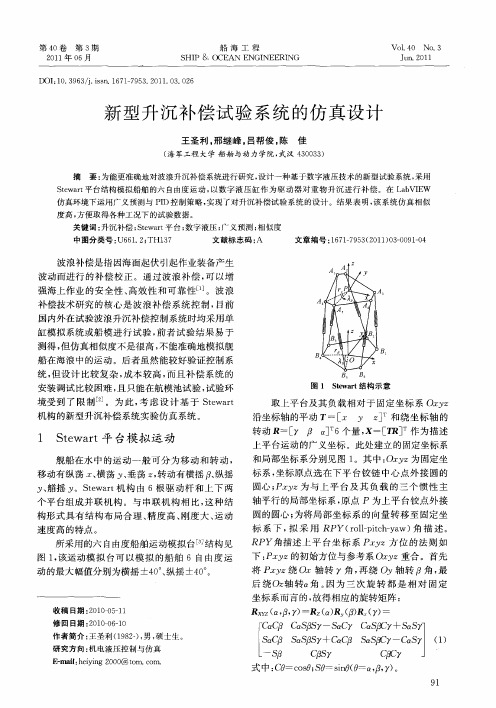
所采 用 的六 自由度 船舶 运动 模拟 台 ¨ 结构 见 3 ] 图 1 该 运动 模 拟 台可 以模 拟 的船 舶 6 自由度 运 ,
Y 艏摇 Y twat 构 由 6根 驱 动杆 和上 下 两 、 。Se r 机 个 平 台组成 并 联 机 构 。与 串联 机 构 相 比 , 种结 这
轴 平行 的局 部 坐标 系 , 点 P 为 上平 台铰 点 外接 原 圆的 圆心 ; 为将 局 部 坐标 系 的 向量 转 移 至 固定 坐
坐标 系而 言 的 , 得相应 的旋 转 矩 阵 : 故
动 的最大 幅值 分别 为横 摇 +4 。纵 摇 ±4。 0、 O。
收 稿 日期 :0 00 — 1 2 1~51
修 回 日期 :0 00 —0 2 1~61
Rvz a, y 一 Rz a R R ) ,( , ) ( ) ( ) ( 一
度高 , 方便取得各种工况下 的试验数 据。 关键 词 : 升沉补偿 ; tw r 平 台; Se at 数字液压 ; 广义 预测 ; 相似度 中图分类号 : 6 . ; U6 12 THI 7 3 文献标志码 : A 文章编号 :6 17 5 (0 10 —0 10 1 7—9 3 2 1 ) 30 9 —4
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
· 794 ·
沉补偿系统动 力 学 状 态 空 间 模 型,在 主 动—被 动 补偿模式中对比分析不同控制策略下得到的仿真 结 果 ,重 点 关 注 系 统 的 补 偿 误 差 和 抗 干 扰 性 能 ,同 时还考虑物理上 实 现 的 可 行 性 和 难 易 程 度,为 将 来搭建现实物理控制系统提供帮助。
Abstract:In order to reduce the impacts of wave on the hoisting in ship- mounted crane during offshore operation under rough weather conditions,a set of heave compensation systems was proposed for ship-mounted crane.A dynamic state space model of the system was built by selecting ship heave motion as input and different state variables as feedback,the payload displacement with passive and active-passive heave compensation modes were achieved respectively under suspensory state.At the end,dynamic performances of these two modes were analyzed according to the simulation results, then a cascade control was adopted as a control strategy in active-passive heave compensation mode.
关 键 词 :船 用 起 重 机 ;主 动 - 被 动 升 沉 补 偿 ;复 合 油 缸 ;串 级 控 制 中 图 分 类 号 :TH21;TH39 DOI:10.3969/j.issn.1004-132X.2012.07.009
Modeling and Simulation on Heave Compensation System of Ship-mounted Crane Zhang Dabing1,2 Wu Jianzhong1 Zheng Fulai 1 Lai Xin1 1.Tongji University,Shanghai,200092 2.Xiangtan University,Xiangtan,Hunan,411105
活塞动力学方程为
mP¨xP =a[kL(xh -axP -xL)+
cL(x·h -ax·P -x·L)]-ΔpcAc +pLAb
(8)
被动补 偿 腔 流 量 方 程 如 下:考 虑 液 压 缸 内 油
液的可压缩性,被 动 补 偿 腔 内 液 体 压 力 与 其 压 缩
量的关系为
Δpc
=
K
ΔVc Vc
(9)
取导数可得
·
pcVc
=
K(-QP
+Acx·P)
(10)
式中,QP 为流出液压缸的流量,即进入蓄能器的流量。
蓄 能 器 数 学 模 型 如 下:设 (pG0,VG0)是 在 平 衡位 置 时 蓄 能 器 内 气 体 压 力 和 气 体 体 积;(pG, VG)是任意工作时刻蓄能器内气体压力与气 体 体
船 用 起 重 机 升 沉 补 偿 系 统 建 模 与 仿 真 ——— 张 大 兵 乌 建 中 郑 福 来 等
的c腔与蓄能 器 8 相 连,蓄 能 器 可 以 作 为 液 压 空 气 弹 簧 吸 收 冲 击 力 ,减 小 了 钢 丝 绳 张 力 的 波 动 ,同 时活塞位移也能够随船的升沉运动发生被动的改 变。在 主 动—被 动 补 偿 模 式 下,通 常 是 使 用 MRU(motion reference unit)运 动 参 考 单 元 测 量 船 舶 的 升 沉 位 移 ,通 过 几 何 计 算 ,得 出 吊 钩 在 竖 直方向的升沉位 移,主 动 控 制 复 合 油 缸 实 时 收 放 钢丝绳,此 时 电 磁 阀 5、7 截 止,比 例 阀 方 向 6 控 制油缸的a腔和 b腔,当两腔有效面积相等时,考 虑滑轮组的倍率 关 系,使 活 塞 产 生 相 应 的 左 右 运 动位移,以抵消由 于 船 体 升 沉 所 引 起 的 吊 钩 额 外 运动。
腔a和 b相通时,忽略旁通阀的压力损失,两主动
补 偿 腔 压 力 相 等 ,作 用 的 有 效 面 积 也 相 等 ,作 用 力
相互抵消,故活塞 杆 主 要 受 钢 丝 绳 的 外 力 和 被 动
补偿腔的油压力作用 : [6]
mP¨xP =a[kL(xh -axP -xL)+
cL
(x·h
·
-axP
-x·L)+kLx0
1.电机油泵 2.溢流阀 3.蓄能器 4,5.二位二 通 电 磁 阀 6.比 例 方 向 阀 7.二 位 二 通 电 磁 阀 8.蓄 能 器 9.复 合 油 缸
图 1 液 压 系 统 原 理 图
2相对复杂,在建立数学模型时对整 个系统作了 简 化 处 理 ,其 假 设 条 件 如 下 :船 体 主 要 在垂直方向上振荡,其他方向的振荡相对很小可忽 略 ;不考虑载 荷 对 船 体 的 反 作 用 力 影 响 ;将 钢 丝 绳 等 效 为 弹 簧 - 阻 尼 模 型[5];液 压 缸 活 塞 的 初 始 位 置 选择在油缸中间位置,同时也是补偿系统在总负载 作用时的平 衡 位 置 ;液 压 系 统 在 工 作 过 程 中 ,温 度 不发生改变;蓄能器中油液压力与气体压力近似认 为相等。系统的动力学模型如图2所示。
Key words:ship-mounted crane;active-passive heave compensation;compound cylinder;cas- cade control
0 引 言
在高海况条件 下,为 能 顺 利 完 成 在 海 上 的 作 业 任 务 ,拓 展 海 上 作 业 时 间 ,保 障 人 身 和 物 资 的 安 全,船舶升沉补偿 技 术 在 海 上 吊 装 作 业 中 有 了 极 其广泛的运用前景。但令人遗憾的是该项技术多 年来一直为国外 少 数 几 家 公 司 所 垄 断,国 内 很 少 有产品成功研制 的 报 道。 文 献 [1-2]采 用 主 副 两 套电液伺服驱动 系 统,通 过 差 动 式 行 星 传 动 卷 扬 机完成下放(起吊)速 度 的 无 级 调 节,实 现 升 沉 补 偿 ,结 构 新 颖 ,由 于 涉 及 主 副 两 套 驱 动 系 统 的 扭 矩 平 衡 、传 动 比 分 配 和 速 度 合 成 等 问 题 ,故 控 制 系 统 相对较复杂;芬兰 麦 基 嘉 公 司 利 用 静 液 二 次 调 节 技术在其船用 150t折 臂 吊 上 开 发 了 绞 车 形 式 的 升沉补偿系统[3],属于旋转型升沉补偿装置,特 点 是具有很好的节 能 效 果,主 要 适 应 于 中 小 型 克 令 吊;荷兰IHC Gusto公司与 德 国 博 世 力 士 乐 公 司 联合推出了基于复合油缸和滑轮组的升沉补偿装 置[4],为直线型升沉补偿装置,适应于大中型克 令 吊系统,最大 起 吊 重 量 可 达 上 千 吨。 本 文 的 主 要 研究 内 容 是 建 立 与 IHC Gusto 公 司 相 类 似 的 升
]-pcAc
(5)
式中,mP 为活 塞 杆 及 挂 在 活 塞 杆 上 滑 轮 组 的 总 质 量 ;x0
为钢丝绳在被 吊 物 体 作 用 下 的 预 拉 伸 量;pc 为 被 动 补 偿
腔瞬时压力;Ac 为被动补偿腔有效面积。
令pc=Δpc+pc0,其中pc0 为系统静止平衡时
液压缸 被 动 补 偿 腔 压 力,那 么 有 pc0Ac =akLx0, 则有
积,为了 便 于 分 析 与 处 理,需 对 其 作 线 性 化 处 理,
并在平 衡 点 (pG0,VG0)处 进 行 泰 勒 展 开,略 去 高
pcAc = ΔpcAc +akLx0
(6)
联 立 式 (5)和 式 (6),整 理 得
mP¨xP =a[kL(xh -axP -xL)+
cL(x·h
·
-axP
·
-xL
)]-
ΔpcAc
(7)
主动 — 被动补偿模式下,复合油缸的两个主
动补偿腔a和 b 由 比 例 方 向 阀 控 制,可 得 液 压 缸
统 ,建 立 了 系 统 的 动 力 学 状 态 空 间 模 型 。 取 船 的 升 沉 运 动 位 移 作 为 系 统 输 入 量 ,通 过 选 择 不 同 的 状 态 变
量 作 为 反 馈 量 ,仿 真 分 析 了 悬 停 状 态 下 被 动 补 偿 模 式 和 主 动 - 被 动 补 偿 模 式 下 载 荷 位 移 的 变 化 ,最 后 根 据仿真结果比较分析了两种补偿模式下的动态性能,确定了以串级控制方 式 作 为 主 动 - 被 动 补 偿 模 式 的控制策略。
图 2 系 统 模 型 简 图
假 定 供 油 压 力 恒 定 ,回 油 压 力 为 零 ,则 比 例 方
向阀的流量方程可表示为
q = Kqxv -KcpL
(1)
式中,Kq 为阀的流量增益系数;xv 为阀芯位移;Kc 为阀的
压力流量系数;pL 为两主动补偿腔压力差(pb -pa)。
阀控缸流量连续性方程为
1 升 沉 补 偿 原 理
升沉补偿装置系统原理如图1所示。该装置 系统通过在普通起重机上加装液压系统和滑轮组 来实时控制钢丝 绳 载 荷 端 的 上 下 运 动 位 移,当 船 体下沉时活塞杆 带 动 滑 轮 伸 出,当 船 体 上 升 时 活 塞杆带动滑轮缩 回,以 此 消 除 波 浪 对 载 荷 产 生 的 升沉影响。该系统有被动补偿模式和主动—被动 补偿模式两种模 式,被 动 补 偿 模 式 主 要 用 于 海 上 两条 船 之 间,或 固 定 平 台 和 供 应 船 之 间,或 船 舶 和海 面 之 间,或 船 舶 和 海 床 之 间 吊 运 货 物,当 货 物达到支持面后(下 放 货 物)或 离 开 支 持 面 前 (起 吊 货 物 )使 用 ,主 要 是 补 偿 钢 丝 绳 的 张 力 ,防 止 由 于船舶的上下起伏而导致钢丝绳松弛从而避免或 减轻 对 起 重 机 或 甲 板 面 的 冲 击。 从 图 1 可 知,当 电磁阀 5、7 导 通 时 为 被 动 补 偿 模 式,复 合 油 缸 9