升沉补偿装置
海洋钻井海上钻井工艺技术

4 4 3 2 1 1
防喷器系统各组分部件
压井和放 喷管线,自四 通接出,一直 延伸到平台上。
压井放喷 管线应该具有 补偿平台运动 的功能,所以 要有伸缩管或 高压软管部分。
6 5 4 2 1 1
防喷器系统各组分部件
为起下方便,在地 面上将防喷器系统的各 部分组合成一个整体。 防喷器框架有四个导向 筒,四根永久导向绳分 别穿入其中,引导防喷 器系统准确地下放并与 导引系统上快速连接器 连接。
防喷器系统
防喷器系统的控制操作通常是用电力、气动和 液压系统组成。液压管线汇集起来形成“管束”, 捆绑在防喷器框架上,引向平台的软管绞车上。液 压能量由平台上的储能器提供。平台上的控制部分, 一般有电动和气动控制系统。电动控制简单、迅速, 所以一般情况下尽可能使用电动控制。在发生井喷 的情况下,不允许使用电的时候,就要使用气动控 制系统。
固 定 钻 井 平 台
水上井口装置
升 沉 平 移 摇 摆
浮 式 钻 井 平 台
水下井口装置
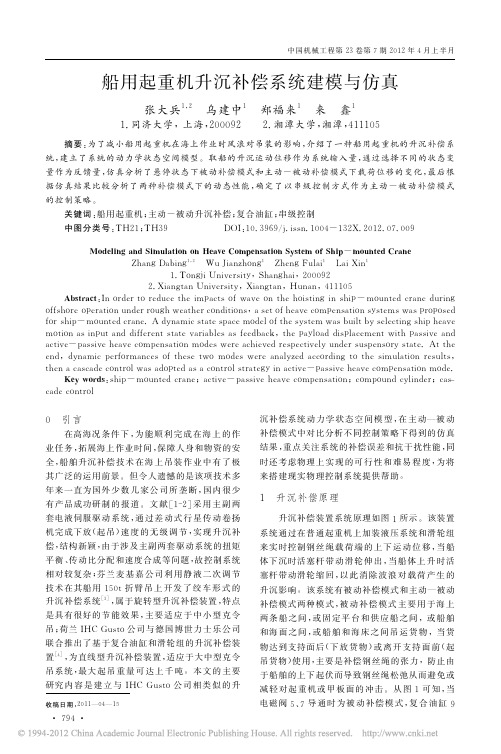
水下井口装置通常
隔
水
是在地面上预制成三大
管 系
组合—导引系统,防喷
统
器系统和隔水管系统。
在海上作业时,用快速
防 喷
连接器将两个组合连接
器 系
起来。
统
水下安装要有一套
导
远程遥控操作系统。必
引 系
要时还要有潜水作业装
统
置或水下机器人操作。
水下井口装置示意图
2、水下井口装置的系统组成
(1)导引系统 (2)防喷器系统 (3)隔水管系统
船用起重机升沉补偿系统建模与仿真
· 794 ·
沉补偿系统动 力 学 状 态 空 间 模 型,在 主 动—被 动 补偿模式中对比分析不同控制策略下得到的仿真 结 果 ,重 点 关 注 系 统 的 补 偿 误 差 和 抗 干 扰 性 能 ,同 时还考虑物理上 实 现 的 可 行 性 和 难 易 程 度,为 将 来搭建现实物理控制系统提供帮助。
Abstract:In order to reduce the impacts of wave on the hoisting in ship- mounted crane during offshore operation under rough weather conditions,a set of heave compensation systems was proposed for ship-mounted crane.A dynamic state space model of the system was built by selecting ship heave motion as input and different state variables as feedback,the payload displacement with passive and active-passive heave compensation modes were achieved respectively under suspensory state.At the end,dynamic performances of these two modes were analyzed according to the simulation results, then a cascade control was adopted as a control strategy in active-passive heave compensation mode.
211048413_深海作业主动升沉补偿起重机
深海作业主动升沉补偿起重机张光锋 陈 刚 胡 茂 姬红斌武汉船用机械有限责任公司 武汉 430084摘 要:当前深海作业对海洋工程装备的要求不断提高,主动升沉补偿起重机应运而生。
文中在国内外研究成果基础上,从环境适应性、补偿系统与起重机适配性、补偿系统与起重机功率集发等关键技术出发,介绍了起重机研制过程中的技术路线,设计制造了一种具有能量回收功能的深海作业主动升沉补偿起重机结构样机,采用折臂式结构形式和绞车式主动升沉补偿系统,并对样机进行试验验证,起重机起吊能力达到200 t,试验结果与国外同类型吊机参数进行了对比总结,样机补偿精度超95%。
关键词:深海作业起重机;主动升沉补偿;能量回收;二次控制单元中图分类号:TH213 文献标识码:A 文章编号:1001-0785(2023)06-0050-05Abstract: Recently, with the increasingly demanding requirements for offshore engineering equipment in deep-sea operation, the application of active heave compensation crane came into being. In this paper, based on the research results at home and abroad, starting from the key technologies such as environmental adaptability, adaptability between compensation system and crane, compensation system and crane power collection and development, the technical route in the development process of crane is introduced, and the design of an active heave compensation crane structure prototype with energy recovery function is put forward. The prototype is equipped with a folding arm structure and a winch active heave compensation system, and the prototype is verified by experiments. The lifting capacity of the crane reaches 200 t. Comparing the test results with the parameters of similar cranes abroad, it is found that the compensation accuracy of the prototype is over 95%.Keywords:deep-sea crane; active heave compensation; energy recovery; secondary control unit0 引言用于深海安装作业的水面工作母船受到海面风浪流的干扰影响将产生空间的波频摇荡运动。
深海采矿装置升沉补偿控制系统研究

移传感器 可以得 到采矿船升沉位移 y。 0
20 0 12 0 5
31 5 . 10 5 1
油 泵的供油压力/ a MP 升沉运 动的幅值/ 咖 升沉运 动的角频 (a s ) r d・
Kq=0 03 /s . 5 5 m。
由电液 比例方 向阀和液压缸 的技术 参数可得 :
s ngi 2 0 o ln 0 5@ 1 3 c m。 6.o
_
・
6 ・ 4
机床与液压
第3 9卷
液伺服装 置 ( 动 密度调 节装 置 )组 成 。当参 照物 驱 定位于设定深度时 ,将压 电传感器的信号变换处理后 传输到 电液伺服装置驱动密度调节装置 ,使组件重力 与 自身浮力相等 ,稳定在零波面处 。有 了这个参考坐 标就可 以用 电磁波接收信号 的方法采集采矿船升沉位 移信号 。 1 3 升 沉补偿 液 压 系统 . 升沉补偿液压 系统原理见 图 2 。
中图分类号 :T D
文献标识码 :A
文章编号 :10 3 8 (0 1 4— 6 3 0 1— 8 1 2 1 )2 0 3—
De i n o a e Co p n a i n Co t o y t m o e s a M i i g sg fHe v m e s to n r lS s e f r De p-e n n
为正值 时 ,控制 器控 制 电液 比例 方 向 阀 向液 压 缸 的下油腔供油 ,旋转 编码器得 到液压 缸向下 运动的补 偿 量 Y ,并 输 入到 控制 器 中形 成反 馈控 制 ;相 反 当 , 为负值 时 ,向液压 缸的上 油腔供 油使其 向上运 动 , , 0 将 此时的补偿量 Y 反馈 到控 制器 。补偿 控制 系统 原
海马号ROV升沉补偿系统张力与压力特性研究

第17卷 第11期 中 国 水 运 Vol.17 No.11 2017年 11月 China Water Transport November 2017收稿日期:2017-09-01作者简介:田烈余(1981-),男,硕士,广州海洋地质调查局工程师,主要研究方向为水下机器人和液压系统等。
海马号ROV 升沉补偿系统张力与压力特性研究田烈余1,孙瑜霞2,陈宗恒1,张青苗3(1.广州海洋地质调查局,广东 广州 510760;2.浙江大学海洋学院,浙江 舟山 321016;3.中国航空工业集团公司西安飞行自动控制研究所,陕西 西安 710065)摘 要:“海马”号4,500m 级无人遥控潜水器(ROV)是国家“863计划”重点项目“4,500m 级深海作业系统”的主要研究成果,是我国自主研发的第一套大深度 ROV 系统,最大工作水深4,500m,主要作业功能是进行海底探测、取样以及其他水下作业。
在工作过程中,为防止母船在波浪作用下产生升沉运动通过主脐带传递到吊放的 ROV 等水下设备,研制一套升沉补偿系统以减小升沉耦合运动传导、吸收加速度动力、减少脐带松弛,以改善 ROV 运动控制条件、防止脐带缆破坏、提高系统作业安全性。
本文参考了国内外升沉补偿系统的设计方案并进行了比较,介绍了所设计的被动式升沉补偿器的主要组成部分,通过建立模型、分析计算、以及实验的方式对升沉补偿系统进行了力学特性研究。
关键词:“海马号”ROV;升沉补偿系统;工作特性;测试实验中图分类号:U674.94 文献标识码:A 文章编号:1006-7973(2017)11-0005-04一、引言1.ROV 升沉补偿系统研究目的海洋探查和资源开发利用、深海观测和研究计划的开展,需要大量的深海设备线缆布放、检测和维护作业,这极大地依赖在水下工作时间长、作业能力强、负载能力大的无人遥控潜水器(ROV)。
因此,国家“863计划”提出了自主研制“4,500m 级深海作业系统”。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
升沉补偿装置
升沉补偿装置
升沉补偿装置一般采用液压传动。
(一)游动滑车与大钩间装设的升沉补偿装置
1.结构
它主要有以下几部分:
1)液缸
两个液缸用上框架与游动滑车相连,随平台升沉而上下运动。
2)活塞
两个液缸中的活塞通过活塞杆与固定在大钩上的下框架连接,大钩载荷由
活塞下面的液压所支承。
3)储能器
储能器与液缸相通。储能器中有活塞,其下端的液体通过软管与液缸相通;
其上端的气体通过管线与储气罐相通。这样,液缸中液体压力由储能器中
气体压力所决定。调节气体压力即可以改变液体压力。
4)锁紧装置
用以将上下两个框架锁紧成一体,从而使游动滑车与大钩连接在一起,进行
起下钻工作。
2、工作原理1)正常钻井时:大钩上悬挂的钻柱总重量Q,井底钻压W与补偿
装置的液缸中的液压间的平衡关系式如下:
将代入式(1-1)中,则可得:
从式(1-2)中可瞧出:
升沉补偿装置
(1)为了保持钻压,只要保持液缸中的液体压力为一定值即可;而为了调节
钻压,只要调节储能器中进气压力即可。
(2)为了实现自动送进,只要调节液缸中液体压力,使略小于整个钻柱的悬
重,并使液缸中活塞行程大于升沉位移即可。
2)绳索作业时:当进行电测、试井等绳索作业时,因下入井内的器具很轻,
升沉补偿装置不能发挥作用,故应另加一根传感绳,使绳底端固定在隔水
管顶部,再通过大钩上悬挂的滑轮,将绳固定在井架底座上。这样,传感绳
作用在大钩上的拉力即相当于钻柱的悬重。
因此,仍可发挥升沉补偿装置的作用,在绳索作业时,进行运动补偿。
绳索作业时,送器具的工作绳,自绞车引出后,通过悬挂在大钩上的另一个
滑轮,下入井内。此滑轮与传感绳通过的滑轮保持一定距离,但都固定在同
一杆件上。
由于钻井的升沉运动,因此传感绳的固定端及工作绳、绞车也随钻台上下
运动。这样,两绳在大钩处的滑轮上时松时紧,将引起两绳作用在大钩处的
拉力时大时小。
但当升沉补偿装置液缸中的液压一定时,若传感绳松,拉力减小,则恒定的
液压推动活塞上行,带动大钩上提,使传感绳又恢复拉紧。而若传感绳拉力
增大时,则由于恒定压力比传感绳的拉力小,于就是活塞及大钩被拉下行,
又可使传感绳放松。
这样,即可使传感绳及工作绳均对大钩保持张力,又可使升沉运动得到补偿,
正常进行绳索作业。
(二)天车上装设的升沉补偿装置
1、结构
天车升沉补偿装置主要由以下几部分组成:
(1)浮动天车
它通过滚轮在垂直轨道内移动。
天车本身除具有普通天车的滑轮外,另多装有两个辅助滑轮,辅助滑轮
的轴与天车滑轮的轴之间用连杆连接。快绳及死绳分别通过两个辅助滑轮
引出。
这样,当天车沿着垂直轨道移动时,只就是辅助滑轮轴动作,而通过辅助滑
升沉补偿装置
轮的钢丝绳与滑轮间无相对运动,可延长钢丝绳的寿命。
(2)主气缸
它就是支持浮动天车用的,相当于大型弹簧,共四个,倾斜放置,由甲板上
的压气机供气。
(3)液缸
共两个,垂直放置,由甲板上油泵供油。它只作为液力缓冲用的安全液缸,
以克服大钩载荷的惯性影响。
(4)储能器
它安装在井架上,有管路与四个主气缸相通,用以调节主气缸中的气体压
力。
2、工作原理
1)补偿升沉
由浮动天车来实现补偿。当浮动平台上升或下降时井架沿轨道上下运
动,主气缸中气体压缩或膨胀,相当于一个大弹簧,而天车及大钩基本上保
持不动,于就是升沉运动得以补偿。
2)控制钻压
司钻利用甲板上的调压阀,控制自空气罐至主气缸系统的空气压力,使井底
钻压调至合适值。
3)自动送进
正常钻井时,将气缸中气压调节到略低于大钩上载荷,于就是,浮动天车
在大钩载荷带动下,沿轨道下行,实现自动进尺。当浮动天车下行至最低
点时,司钻即放松绞车滚筒上钢丝绳,使浮动天车上行至最高点,然后再继
续自动进尺。
4)防止事故
当大钩载荷突然减少或主气缸严重漏气时,可借助液缸支持着钻柱重量,并
使其减速,以防止事故,保证安全。
5)绳索作业
绳索作业时,可另加一根传感绳,使其一段固定在隔水导管上,另一端自
井架外边引至浮动天车上,经滑轮后,再连到钻台的滚筒上。这样,传感
升沉补偿装置
绳随钻台运动而放松或缠紧,浮动天车在恒定气压下随之相应地补偿
运动,即可实现绳索作业时的升沉补偿。
6)起下钻作业
起下钻时,用锁紧装置将浮动天车锁住,使浮动天车不随起下钻柱而上下滑
行。
(三)死绳上装设的升沉补偿装置
1、结构
它主要由以下几部分组成:
1)定滑轮组
死绳自天车引出后,先经过一个传感滑轮,将拉力大小变成电信号,传至指
重表,再穿过定滑轮组及动滑轮,最后,死绳端自定滑轮组引出固定在死绳
固定器上。
2)动滑动组
它可以在框架内移动,其行程大小与死绳拉力有关。动滑轮组的轴承座装
在行车上,行车上下均有滚轮,滚轮沿上下工字梁轨道滑行。动滑轮组前面
为固定在行车上的半月牙形拨叉,拨叉另一端与液缸的活塞杆相连。
3)液缸
液缸中有活塞,一端液体与低压储能器相通,另一端液体与高压储能器相
通。
当死绳上拉力减少时,传感滑轮发出信号后,指令阀动作,活塞右端压力增
加,推动活塞向左移动,将滑轮组上的钢丝绳拉紧,活塞左端液体流回低
压储能器。
当死绳上拉力增加时,指令阀动作后,活塞右端液体压力减低,活塞向右移
动,使死绳放松,直至达到恒定拉力,液体自活塞右端流回储能器。
4)高压储能器
储能器由压气机供气,上部有安全阀,下部有放气阀。
5)低压储能器
空气经滤清器,调节器沿管路进入低压储能器,其上部也有放气阀。
升沉补偿装置
6)控制台
控制台上有压力表、指重表、动滑轮组行程指示灯、压力控制器、压气机
启动及停车机构等。
2、工作原理
借助调节储能器中气压来改变死绳拉力。再通过死绳上拉力的改变来调节
及保持井底钻压。
此外,还可通过液压推动活塞移动来调节钢丝绳的有效长度。
综合上述,死绳上装设的升沉补偿装置,由于需装设传感信号与传令等电控
制系统,结构比较复杂,所以应用较少。
天车上装设的升沉补偿装置虽然占用甲板面积小,而且管线短,密封少,不
需要高压胶管,有不少长处,但因需特制大尺寸井架及天车,故应用也不广
泛。
目前应用较多的就是在游动滑车与大钩间装设的升沉补降装置,它不需要
特制井架及天车,游动滑车及大钩也就是通用的。
但其缺点就是液缸密封多,液压油漏失问题严重,管路长,摩擦损失大等,还
有待进一步改进。