基于MATLAB软件中SIMULINK的机构运动仿真
基于MATLABSimulink机电系统动态仿真教程第一章
二、仿真的分类
按模型分类
1、物理仿真:采用物理模型,有实物介入! 具有效果逼真,精度高等优点,但造价高或耗时长, 大多在一些特殊场合下采用(如导弹、卫星一类飞 行器的动态仿真,发电站综合调度仿真与培训系统 等),具有实时性、在线的特点。 2、数学仿真:采用数学模型 在计算机上进行,具有非实时性、离线的特点,经 济、快速、实用。
《机电系统动态仿真——基于 MATLAB/Simulink》
刘白雁教授编著 机械工业出版社
2006,8
仿真软件的简介 一、仿真的发展
1、程序编程阶段: 所有问题(如:微分方程求解、 矩阵运算、绘图等)都是用高级算法语言(如C、 FORTRAN等)来编写。 2、程序软件包阶段: 出现了“应用子程序库”。 3、交互式语言阶段(仿真语言:仿真语言可用一 条指令实现某种功能,如“系统特征值的求解”, 使用人员不必考虑什么算法,以及如何实现等低 级问题。 4、模型化图形组态阶段:符合设计人员对基于模 型图形化的描述。
三、常见的几种仿真软件
PSPICE、ORCAD:通用的电子电路仿真软件, 适合于元件级仿真。 SYSTEM VIEW:系统级的电路动态仿真软 件 MATLAB:具有强大的数值计算能力,包含 各种工具箱,其程序不能脱离MATLAB环境 而运行,所以严格讲,MATLAB不是一种计 算机语言,而是一种高级的科学分析与计算软 件。 SIMULINK:是MATLAB附带的基于模型化 图形组态的动态仿真环境。
按计算机类型分类
1、模拟仿真:采用数学模型,在模拟计算机 上进行的实验研究。50年代 2、数字仿真:采用数学模型,在数字计算机 上借助于数值计算方法所进行的仿真实验。 60年代
3、混合仿真:结合了模拟仿真与数字仿真。 4、现代计算机仿真:采用先进的微型计算机,基于 专用的仿真软件、仿真语言来实现,其数值计算 功能强大,使用方便,易学。80年代以来
Matlab系列之Simulink仿真教程

交互式仿真
Simulink支持交互式 仿真,用户可以在仿 真运行过程中进行实 时的分析和调试。
可扩展性
Simulink具有开放式 架构,可以与其他 MATLAB工具箱无缝 集成,从而扩展其功 能。
Simulink的应用领域
指数运算模块
用于实现信号的指数运算。
减法器
用于实现两个信号的减法 运算。
除法器
用于实现两个信号的除法 运算。
对数运算模块
用于实现信号的对数运算。
输出模块
模拟输出模块
用于将模拟信号输出 到外部设备或传感器。
数字输出模块
用于将数字信号输出 到外部设备或传感器。
频谱分析仪
用于分析信号的频谱 特性。
波形显示器
控制工程
Simulink在控制工程领域 中应用广泛,可用于设计 和分析各种控制系统。
信号处理
Simulink中的信号处理模 块可用于实现各种信号处 理算法,如滤波器设计、 频谱分析等。
通信系统
Simulink可以用于设计和 仿真通信系统,如调制解 调、信道编码等。
图像处理
Simulink中的图像处理模 块可用于实现各种图像处 理算法,如图像滤波、边 缘检测等。
用于将时域信号转换为频域信号,如傅里叶变换、 拉普拉斯变换等。
03 时域变换模块
用于将频域信号转换为时域信号,如逆傅里叶变 换、逆拉普拉斯变换等。
04
仿真过程设置
仿真时间的设置
仿真起始时间
设置仿真的起始时间,通 常为0秒。
步长模式
选择固定步长或变步长模 式,以满足不同的仿真需 求。
matlab-SIMULINK仿真实例

二并联杆数控螺旋面钻头尖刃磨机的机构仿真一、仿真原理图1二并联杆数控螺旋面钻头尖刃磨机床示意图图2 二并联杆数控螺旋面钻头尖刃磨机床刃磨原理图重要假设条件:1、二并联杆数控螺旋面钻头尖刃磨机床是通过两组并联杆(2,a和3,b)保证动平台4只在空间中做水平运动,而没有翻转运动。
每一组并联杆是由空间相互平行的4根杆件组成,由于组内各杆件受力相同,所以将其简化成平面机构如图2。
构件a,b是保证动平台4只做水平运动的辅助平行杆,所以可以假设将机构中杆件a,b省略,而动平台4只做水平移动,没有翻转运动,也就是4相对于地面的夹角θ4恒等于0。
2、直线电机的次子有两个(1和5)但是在加工过程中并不是两者同时运动,所以假设5与导轨固联。
3、假设机床在工作过程中动平台4只受到树直向上的恒力作用,且作用在其中心位置。
基于以上假设机床平面结构示意图如图3。
图3二并联杆数控螺旋面钻头尖刃磨机床简化机构平面结构示意图二、建立仿真方程C2=cos(θ2) S2=sin(θ2) C3=cos(θ3) S3=sin(θ3)一)力方程(分别对各个杆件进行受力分析)对动平台4:受力分析如图4F24x+F43x=m4*Ac4x (1)F24y+F43y=m4*Ac4y (2)F24y*rc4-F43y*rc4=0 (3)图4动平台4的受力分析对并联杆2:受力分析如图5F12x+F24x=-m2*Ac2x (4)F12y+F24y=-m2*Ac2y (5)F12x*rc2*S2+F12y*rc2*C2-F24x*rc2*S2-F24y*rc2*C2=I2*α2 (6)图5并联杆2的受力分析对直线电机滑块1:受力分析如图6Fm+F12x=m1*r1_dot_dot (7)Fy=F12y (8)图6直线电机滑块1的受力分析对并联杆3:受力分析如图7图7并联杆3的受力分析二)闭环矢量运动方程(矢量图如图8)图8 闭环矢量图矢量方程为:R1+R2=R3+R4将上述矢量方程分解为x和y方向,并分别对方程两边对时间t求两次导数得:r1_dot_dot+r2*α2*S2+r2*w2^2*C2=r3*α3*S3+r3*w3^2*C3 (12)r2*α2*C2-r2*w2^2*S2=r3*α3*C3-r3*w3^2*S3 (13)三)质心加速度的矢量方程F13x+F43x=-m3*Ac3x (9)F13y+F43y=-m3*Ac3y (10)F43x*r3*C3+F43y*r3*S3= I3*α3 (11)图9质心加速度的矢量示意图矢量关系:Ac3=Rc3_dot_dotAc4=R3_dot_dot+ Rc4_dot_dotAc2=R3_dot_dot+ R4_dot_dot+ Rc2_dot_dot (_dot_dot 表示对时间求两次导数)将上述三个矢量方程分别分解为x 和y 方向,则它们等效为以下六个方程;Ac3x=-rc3*w3^2*C3-rc3*α3*S3 (14) Ac3y=-rc3*w3^2*S3+rc3*α3*C3 (15) Ac4x=-r3*w3^2*C3-r3*α3*S3 (16) Ac4y=-r3*w3^2*S3+r3*α3*C3 (17) Ac2x=-r3*w3^2*C3-r3*α3*S3-rc2*w2^2*C2-rc2*α2*S2 (18) Ac2y=-r3*w3^2*S3+r3*α3*C3-rc2*w2^2*S2+rc2*α2*C2 (19) 力未知量为:F12x,F12y,F24x,F24y,F43x,F43y,F13x,F13y,Fy,Fm 引入的加速度有:α2,α3,r1_dot_dot ,Ac3x ,Ac3y ,Ac4x ,Ac4y ,Ac2x ,Ac2y三、系统方程的组装将所有19个方程组装成矩阵形式1010000000000200000010100000000002002222222200000020000000000101000000000000400001010000000000004000101000000000000010000000010010000000100000010000000000000010100000000m m rc S rc C rc S rc C I m m m ⋅⋅-⋅-⋅-----300000000101000000003000000333300003000000000000000002233100000000000000002233000000000000000002233010000000000000002233001000000000000000330001000000000000m m r C r S I r S r S r C r C rc S r S rc C r C rc S ⋅⋅-⋅-⋅⋅-⋅⋅⋅⋅⋅-⋅003300001000000000000033000001000000000000330001rc C r S r C ⎛⎫⎪ ⎪⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪ ⎪⎪⎪⋅-⎪⋅ ⎪⎪ ⎪⋅-⎝⎭120120240240434301301300020333^2322^2222^2233^2322^222233441F x F y F x F y F x p F y F x F y Fy Fm r w C r w C r w S r w S rc w C Ac x Ac y Ac x Ac y Ac x Ac y r αα••⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⨯= ⎪ ⎪ ⎪⋅⋅-⋅⋅ ⎪ ⎪⋅⋅-⋅⋅ ⎪-⋅⋅ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭33^2322^2233^2333^2333^2333^2333^23r w S rc w S r w S rc w C rc w S r w C r w S ⎛⎫ ⎪⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎪⎪ ⎪ ⎪ ⎪-⋅⋅ ⎪⋅⋅+⋅⋅ ⎪ ⎪-⋅⋅ ⎪ ⎪⋅⋅ ⎪-⋅⋅ ⎪⎪ ⎪⋅⋅⎝⎭ 四、初始条件的设定假设图3位置就是初始位置。
基于MATLABSimulink的动态仿真的事例

2 3
4
MATLAB/Simulink应用实例 MATLAB/Simulink应用实例
1、背景知识 、 什么是系统仿真 什么是系统仿真? 是系统仿真
LOGO
系统仿真是建立在控制理论、相似理论、信 息处理技术和计算技术等理论基础之上的,以计 算机和其它专用物理效应设备为工具,利用系统 模型对真实或假想的系统进行试验,并借助于专 家经验知识、统计数据和信息资料对试验结果进 行分析研究,进而做出决策的一门综合性的和试 验性的学科。 在工程技术界,系统仿真是指通过对系统模 型的试验,间接地获取原形的规律性认识
LOGO
LOGO
例:已知系统模型G(s)= 期为5s的方波信号作用下的响应。
M文件代码 文件代码
,计算系统在周
响应曲线
Thank you
MATLAB的语言特点
编程效率高 使用方便 高效方便的科学计算 先进的可视化工具 开放性,可扩展性强 运行时动态连接外部C或FORTRAN C FORTRAN应用函数 MATLAB及其他标准格式的数据文件 输入输出各种MATLAB 特殊应用工具箱 高效仿真工具Simulink Simulink
MATLAB的模块构成
LOGO
SIMULINK是一个进行动态系统建模、仿真和综合分析的集 是一个进行动态系统建模、 是一个进行动态系统建模 成软件包。它可以处理的系统包括:线性、非线性系统; 成软件包。它可以处理的系统包括:线性、非线性系统;离 连续及混合系统;单任务、 散、连续及混合系统;单任务、多任务离散事件系统 SIMULINK 提供的图形用户界面 提供的图形用户界面GUI上,只要进行鼠标的简 上 单拖拉操作就可构造出复杂的仿真模型。 单拖拉操作就可构造出复杂的仿真模型。它外表以方块图形 式呈现,且采用分层结构。 式呈现,且采用分层结构。 从建模角度讲,这既适于自上而下( 从建模角度讲,这既适于自上而下(Top-down)的设计流 ) 概念、功能、系统、子系统、直至器件), ),又适于自下 程(概念、功能、系统、子系统、直至器件),又适于自下 而上( 而上(Bottum-up) 逆程设计。 ) 逆程设计。 从分析研究角度讲, 从分析研究角度讲,这种 SIMULINK 模型不仅能让用户知 道具体环节的动态细节,而且能让用户清晰地了解各器件、 道具体环节的动态细节,而且能让用户清晰地了解各器件、 各子系统、各系统间的信息交换, 各子系统、各系统间的信息交换,掌握各部分之间的交互影 响。 SIMULINK 环境中,用户将观察到现实世界中非线性因素 环境中, 和各种随机因素对系统行为的影响。 和各种随机因素对系统行为的影响。 SIMULINK 环境中,用户可以在仿真进程中改变感兴趣的 环境中, 参数,实时地观察系统行为的变化。 参数,实时地观察系统行为的变化。
基于MATLAB软件中SIMULINK的机构运动仿真
第 3 期( 总第 124 期) 2004 年 6 月
机械工程与自动化 M ECHA N ICAL EN GI NEER IN G & AU T O M A T IO N
0, 2= - 62. 833 3rad/ s, 5 = 85. 273 8rad/ s, lBC = 75m m, lCD = 95m m, vBC= 0, vCD = 0。 3 无级变速器机构运动学的SIM UL INK 仿真
根据已知参数的值和加速度矢量方程, 建立仿真 模块如图2。其中曲柄的角加速度和角速度作为输入, 运动中杆BC、CD 每个瞬时的杆长、位置、角速度、角 加速度以及输出杆 DE 每个时刻的角速度、角加速度 作为输出, 以向量存储在工作空间 A B C 和 CDE 中。
得到各构件角度的仿真曲线图( 见图 3) ;
jias udu- abc. m 的输入为 1, 2 , lBC, 2, v BC , 1, 1 ,
··
输出为 2, lB C 。jiasudu- cde. m 的输入为 2, 5, lCD ,
··
2 , v CD , 5 , 2, 输出为 5, lC D 。设定仿真的时间t =
参考文献: [ 1] 周进雄 . 机构 动态仿真 ( 使用 M A T L A B 和 SIM U L IN K )
[ M ] . 西安: 西安交通大学出版社, 2002: 25-47. [ 2] 梁 海顺. 平 网印花机 无级变 速器的 运动性 能与优化 设计
基于MatlabSimulink和GUI的运动控制系统虚拟实验平台设计
谢谢观看
2、提高效率:通过计算机硬件虚拟实验平台进行实验,用户可以在短时间 内完成实验设计、模拟和测试等整个过程。此外,该平台还可以实现多用户同时 使用,提高了实验效率。
3、增强安全性:在虚拟环境中进行实验,可以避免由于误操作或者不规范 操作导致的设备损坏或者人员伤害,增强了实验的安全性。
4、丰富的实验资源:计算机硬件虚拟实验平台可以提供丰富的实验资源, 包括各种类型的CPU、内存、I/O接口等,可以满足不同用户的需求。
四、结论
计算机硬件虚拟实验平台的设计与实现具有重要的现实意义和实际应用价值。 该平台可以降低实验成本、提高实验效率、增强安全性以及提供丰富的实验资源。 为了实现该平台,我们需要选择合适的硬件设计工具、模拟和仿真工具、调试工 具和集成开
发环境等工具,并提供可视化工具帮助设计人员更好地理解和分析实验结果。 未来的计算机硬件虚拟实验平台将更加完善和强大,为计算机硬件设计和教育领 域提供更多的可能性。
2、智能控制:通过遥控器、手机App等设备控制家电设备,如空调、加湿器、 灯光、窗帘等;支持多种智能场景模式,如离家模式、会客模式、睡眠模式等; 将控制状态通过GUI界面实时展示给用户。
参考内容二
随着科学技术的发展,虚拟仿真实验平台已成为实验教学中的重要工具。虚 拟仿真实验平台可以为学生提供一个高度仿真的实验环境,帮助学生更好地理解 和掌握实验原理和方法。在众多虚拟仿真实验平台中,基于LabVIEW的平台设计 具有广泛的应用前景。
3、调试工具:调试工具可以帮助设计人员找出设计和实现中的错误。JTAG 是一种常用的调试工具,它可以用来调试硬件设计和软件代码。
4、集成开发环境(IDE):提供一个集成的开发环境,可以使得设计人员更 容易地进行设计和调试。该环境应包括编辑器、编译器、仿真器和调试器等工具。
如何使用MATLABSimulink进行动态系统建模与仿真
如何使用MATLABSimulink进行动态系统建模与仿真如何使用MATLAB Simulink进行动态系统建模与仿真一、引言MATLAB Simulink是一款强大的动态系统建模和仿真工具,广泛应用于各个领域的工程设计和研究中。
本文将介绍如何使用MATLAB Simulink进行动态系统建模与仿真的方法和步骤。
二、系统建模1. 模型构建在MATLAB Simulink中,可以通过拖拽模块的方式来构建系统模型。
首先,将系统的元件和子系统模块从库中拖拽到模型窗口中,然后连接这些模块,形成一个完整的系统模型。
2. 参数设置对于系统模型的各个组件,可以设置对应的参数和初始条件。
通过双击模块可以打开参数设置对话框,可以设置参数的数值、初始条件以及其他相关属性。
3. 信号连接在模型中,各个模块之间可以通过信号连接来传递信息。
在拖拽模块连接的同时,可以进行信号的名称设置,以便于后续仿真结果的分析和显示。
三、系统仿真1. 仿真参数设置在进行系统仿真之前,需要设置仿真的起止时间、步长等参数。
通过点击仿真器界面上的参数设置按钮,可以进行相关参数的设置。
2. 仿真运行在设置好仿真参数后,可以点击仿真器界面上的运行按钮来开始仿真过程。
仿真器将根据设置的参数对系统模型进行仿真计算,并输出仿真结果。
3. 仿真结果分析仿真结束后,可以通过查看仿真器界面上的仿真结果来分析系统的动态特性。
Simulink提供了丰富的结果显示和分析工具,可以对仿真结果进行绘图、数据处理等操作,以便于对系统模型的性能进行评估。
四、参数优化与系统设计1. 参数优化方法MATLAB Simulink还提供了多种参数优化算法,可以通过这些算法对系统模型进行优化。
可以通过设置优化目标和参数范围,以及定义参数约束条件等,来进行参数优化计算。
2. 系统设计方法Simulink还支持用于控制系统、信号处理系统和通信系统等领域的特定设计工具。
通过这些工具,可以对系统模型进行控制器设计、滤波器设计等操作,以满足系统性能要求。
MATLAB_Simulink软件的曲柄导杆机构运动学仿真
[研究・设计]收稿日期:2007204209作者简介:赵小刚(1981-),男,陕西户县人,助教,主要研究方向为机械工程CAD CAM 。
MA TLAB S i m ulink 软件的曲柄导杆机构运动学仿真赵小刚1,李永春2 (1.陕西国防工业职业技术学院机械系,陕西户县 710302; 2.陕西科技大学机电工程学院,陕西西安 710021) 摘 要:为了求解曲柄导杆机构的运动学规律,运用矢量法进行了分析,建立了曲柄导杆机构的运动学数学模型。
使用M A TLAB Si m ulink 仿真软件对曲柄导杆机构进行了运动学仿真,得到了导杆及滑块的位移、速度、加速度的运动曲线。
使用这种方法求解机构的运动学参数具有精度高、速度快等特点。
关 键 词:曲柄导杆机构;运动学;M A TLAB Si m ulink 软件;仿真中图分类号:TH 112;T P 391.9 文献标志码:A 文章编号:100522895(2007)06200392030 引 言曲柄导杆机构是一种应用比较广泛的平面连杆机构,它可以将曲柄的旋转运动转换成为导杆的往复摆动(摆动导杆机构)或整周旋转运动(转动导杆机构)[1]。
曲柄导杆机构还可以与别的基本四杆机构组合在一起,构成一些实用的组合机构,如刨床,车床的主运动机构等。
机构的运动参数是分析评价机构工作性图1 曲柄摆动导杆机构简图能,优化新机构的基本依据[2]。
对曲柄导杆机构的运动分析,即构件上特定点的位移、速度和加速度分析,常用的方法有图解法和解析法。
图解法较直观、方便,但是精度不高,需要反复作图;而解析法人工计算运算量大,容易出错[3]。
本文以曲柄摆动导杆为例,提出用M A TLAB 软件仿真工具箱Si m u link 对曲柄导杆机构进行运动学仿真,得到曲柄导杆机构的运动曲线,该方法使解析法获得更高的精度。
1 曲柄摆动导杆机构运动学数学模型的建立图1所示为一曲柄摆动导杆机构,曲柄OA 为原动件,导杆B A 是从动件,通过滑块,曲柄的连续转动转变为导杆的往复摆动。
基于Matlab_Simulink平台机构动态仿真的研究
+ F 4, 3
m3 ∞. 口
2.
一
+F 一 m3 m 口
( ( ( 1 ( (
F4 ( 3 3 r 一 3 sn(3 + F, (3 )i 0) 3 r 一 )o ( 3 一 F r3 o (, + F3。 s ( s 一 Ia . cs0) c s0 ) 2 r3 i 0 ) 3s n
下 面 详 细 给 出每 个 步 骤
2 1 力 方 程 .
对 曲柄滑块 中每个连接件应用牛顿定律 , 给出如下的受力 分析 图。
() a连接件2 的受力分析
() b连接件4 的受 力分析
,
() c 连接什3 的受力 分析
图 2 曲柚 滑块 机构 的受 力 图 分析 对 杆 2作受 力 分 析 , 易 写 出它 的运 动方 程 : 容
输入 。
图 1 受外加力矩及力作用力的 曲柄滑块机构 示意图( 曲柄匀速转动)
2 联立 约数 法在 建 立 曲柄 滑块 机构 动态仿真 模 型 中的应 用
机 构 是一 个 约 束 系 统 , 相 对 运 动 的 特 性 由机 构 的几 何关 系 预 先 确 定 。联 立 约 数 法 就 是 对 机 构 中 每 个 连 接 件 应 用 其
.
2
l
)
2
2
i
2
3
2
4
2 2
5
)
2
7
*
司文 荣 , , 苏 张 家 港 市人 。航 天 四院 4 1所 2 0 硕 士 研 究 生 。 男 江 0 0 3级
24
维普资讯
20 年 第 l 06 期 桂 林航天工业高等专科学校 学报 ( 第 4 期 ) J U N LO ULNC L E EO E O P C E H O O Y 司文 荣 曲继和 张 秀玲/ 总 1 O R A FG II O L G FA R S A ET C N L G 文
基于MATLAB_Simulink的偏置式曲柄滑块机构运动学仿真
偏置 式 曲柄 滑块 机 构 为例 , 提 了用 MA L T AB软 件仿 真
『 ri0 I I『 厂i 22jo0 r jo&] 、 1 3n3] s 】 一 2s r cs2 3 cs , 2n 一 ∞ -( o
f柄 滑 块 机 构是 单 缸 四 冲程 发 动机 的关 键 机 构 , } f 1 对
同理 , ( ) 式 ( ) 时 间求 二 阶导 数 , 到偏 置式 式 2和 3对 得
曲柄 滑块 机构 的加速 度方 程 , 成矩 阵形式 : 写
l柄滑块机构进行运动学仿真意义重大 ,通过仿真可以 } n
摘
要: 针对偏置式曲柄滑块机构, 建立7速度和加速度的闭环矢量 方程, 使用 MA L B S l TA i mu ( 对偏置式曲柄滑块
裘孳籀 雾 | |
机 进 了 动 仿 ,到 连 及 块 运 线 使 这 方 可 方 地 察 机 运 特I 变 高 构 行 运 学 真 得 了 杆 滑 的 动曲 。 用 种 法 以 便 观 到 构 动 化 提 了 生 的
a e e t b i h d i h sp p r y u i g t e MATL i l k t o , h i e t ssmu a i n o e e t n c a k si e r sa l e n t i a e .B sn h s AB S mu i o l t e k n ma i i l t fd f c i r n l r n c o l o d
2. a tc I1Ex ei n tto . ii ie st fE e to cT c n lg ,Guln 5 0 4. i a) Prciea1 p rme tS ain Guln Un v riyo l crni e h oo y ( ii 41 0 Ch n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 5 连 杆 BC、摆杆 D E 的角速度随曲柄转角变化曲线 图 3 连杆 B C 和摆杆 D E 的位置随曲柄 转角的变化曲线
图 6 连 杆 BC、摆杆 D E 角加速度随曲柄转角变化曲线
图 4 连杆 B C 和摆杆 D E 长度随曲柄 转角变化曲线
( 2) 由于这种运动分析方法基于软件中强大的矩 阵计算功能, 仿真不仅可以得到运动时间与位置、速
2
2
式中: 1—— 曲柄 A B 的角加速度;
2—— 连杆 BC 的角加速度;
5—— 摆杆 D E 的角加速度;
1 ——曲柄 A B 的角速度;
2 ——连杆 B C 的角速度; 5 ——摆杆 D E 的角速度。 2 计算积分方程中的初始值 SIM U LINK 仿真工具的算法主要是数值积分, 所 以积分方程中初始值非常关键, 它决定了整个方程的 解, 因而它必须是机构的一组精确的解。已知无级变 速 器 机 构 各杆 长 lA B = 25mm, l AC = 100mm , lD E = 70m m, l AE = 265mm , 曲柄以 188. 5rad/ s 的角速度匀 速转动, 即 1= 188. 5rad/ s, 1= 0, 计算t= 0 特殊时 刻其它杆件的位置和速度解分别为 1= 0, 2= 0, 5 =
得到各构件角速度的仿真曲线图( 见图5) ;
plo tyy ( A BC( : , 1) , A BC( : , 6) , CDE( : , 1) , CDE( : , 6) )
入:
得到各构件角加速度的仿真曲线图( 见图 6) 。
·6·
机 械 工 程 与 自 动 化 2004 年第 3 期
武 娟1, 任家骏1, 吴凤林1, 刘 群2
( 1. 太原理工大学 机械工程学院, 山西 太原 030024; 2. 太原第二热电厂, 山西 太原 030041)
摘 要: 给 定 机 构 的尺 寸 参 数, 列 出 所要 分 析 机 构加 速 度 关 系 的 闭 环 矢量 方 程, 使用 M A T L A B 软 件 中 SIM U L IN K 仿真工具可以方便地求出机构在所计时间域内连续运动中 各个构件的瞬时位 置、速度和加速度。 作 为一种运动分析的新方法, 改变尺寸参数, 可以方便地观察到机构运动特性的变化。使 用这种方法分析了一 种 无级变速器机构。 关 键词: 机 构; 仿真 ; M AT L AB; SIM U L IN K 中 图分类号: T B115 文献标识码: A
lBCcos 2 sin 2 - lBCs in 2 cos 2
2
·· = lB C
·
- lAB cos
1 1+
lABห้องสมุดไป่ตู้sin 1
21+
lBCsin 2
2 2
-
2 lB C co s
2
2
·
,
l ABsin 1 1 + lA Bcos 1
2 1
+
l BCco s
2
2 2
+
2 lB C sin
2
4 结论 ( 1) MA T L AB 软件中的SIM UL INK 仿真工具用
于机械工程中机构的运动学仿真, 简单、方便、直观, 只 需要一个 M 文件编写的运动学方程和特殊时刻的初 始值就可以得到任意时刻的位置、速度和加速度的值, 并可观察到它们在整个运动周期内的变化特性。
度和加速度的关系, 也可方便地得到后三者之间的相 互关系。这是用一般的解析法进行分析时所不能及的。
授; 刘群( 1970-) , 女, 河北省安国市人, 工程师。
2004 年第 3 期 武娟, 等: 基于 M A T L A B 软件中 SIM U L IN K 的机构运动仿真
·5·
lCD sin 2 + l DEsin 5 = 0 , …………………… ( 3) lCD co s 2+ lDE cos 5= l CE 。 ………………… ( 4) 对式( 1) 、( 2) 和( 3) 、( 4) 求时间的二次导数得到加 速度关系的运动学方程:
0, 2= - 62. 833 3rad/ s, 5 = 85. 273 8rad/ s, lBC = 75m m, lCD = 95m m, vBC= 0, vCD = 0。 3 无级变速器机构运动学的SIM UL INK 仿真
根据已知参数的值和加速度矢量方程, 建立仿真 模块如图2。其中曲柄的角加速度和角速度作为输入, 运动中杆BC、CD 每个瞬时的杆长、位置、角速度、角 加速度以及输出杆 DE 每个时刻的角速度、角加速度 作为输出, 以向量存储在工作空间 A B C 和 CDE 中。
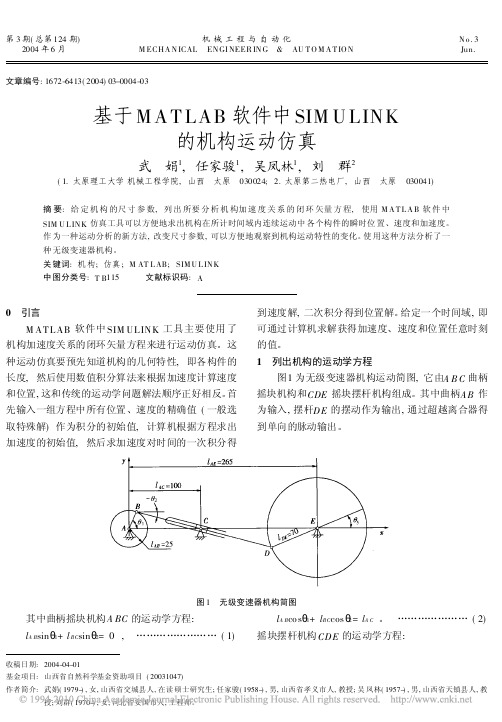
图 1 无级变速器机构简图
其中曲柄摇块机构 A BC 的运动学方程:
lA Bco s 1+ lBCcos 2 = lA C 。 ………………… ( 2)
lA Bsin 1+ l BCsin 2= 0 , …………………… ( 1) 摇块摆杆机构 CD E 的运动学方程:
收稿日期: 2004-04-01 基金项目: 山西省自然科学基金资助项目 ( 20031047) 作者简介: 武娟( 1979-) , 女, 山西省交城县人, 在读 硕士研究生; 任家骏( 1958-) , 男, 山西省孝义市人, 教授; 吴 凤林( 1957-) , 男, 山西省天镇县人, 教
第 3 期( 总第 124 期) 2004 年 6 月
机械工程与自动化 M ECHA N ICAL EN GI NEER IN G & AU T O M A T IO N
No. 3 Ju n .
文章编号: 1672-6413( 2004) 03-0004-03
基于 M A T L AB 软件中 SIM U L INK 的机构运动仿真
到速度解, 二次积分得到位置解。给定一个时间域, 即 可通过计算机求解获得加速度、速度和位置任意时刻 的值。 1 列出机构的运动学方程
图1 为无级变速器机构运动简图, 它由A B C 曲柄 摇块机构和CDE 摇块摆杆机构组成。其中曲柄A B 作 为输入, 摆杆DE 的摆动作为输出, 通过超越离合器得 到单向的脉动输出。
0. 005s, 计算机的运算精度为 10- 8, 如在命令行中输
plo tyy ( A BC( : , 1) , A BC( : , 3) , CDE( : , 1) , CDE( : , 3) )
得到各构件长度的仿真曲线图( 见图 4) ;
plo tyy ( A BC( : , 1) , A BC( : , 4) , CDE( : , 1) , CDE( : , 4) )
0 引言 M ATLAB 软件中SIM ULINK 工具主要使用了
机构加速度关系的闭环矢量方程来进行运动仿真。这 种运动仿真要预先知道机构的几何特性, 即各构件的 长度, 然后使用数值积分算法来根据加速度计算速度 和位置, 这和传统的运动学问题解法顺序正好相反。首 先输入一组方程中所有位置、速度的精确值 ( 一般选 取特殊解) 作为积分的初始值, 计算机根据方程求出 加速度的初始值, 然后求加速度对时间的一次积分得
图 2 机构运动学仿真模块框图
图2 中的jiasudu- abc. m 和jiasudu- cde. m 为编写 的两个用 MAT LAB 函数求解加速度的运动方程。
plo tyy ( A BC( : , 1) , A BC( : , 2) , CDE( : , 1) , CDE( : , 2) )
Mechanism Kinematics Simulation Using SIMULINK in MATLAB
WU Juan1, REN Jia-j un1, WU Feng-lin1, LIU Qun2
( 1. T aiyuan U n iversi ty of T echnology, T aiyu an 030024, China; 2. T aiyuan Second Th erm al Pow er Plant , Taiyuan 030041, Ch ina) Abstract: Given the par ameter s of the mechanism and v ect or lo op equatio ns o f a ccelerat ion, SI M U L IN K T oo lbox in M A T L A B can calculate position, v elo city and accelerat ion of each component dur ing the g iv en time . A s a new metho d for kinemat ics analysis, the T o olbox can get var iable kinema tics char acter istics easily with var iable paramet ers. In this paper, a kink o f var iable continuously tr ansmission is analy zed. Key words: mecha nism ; simula tio n; M A T L A B; SIM U L IN K
2
lDE cos 5 s in 2 - lDE sin 5 cos 2
5
·· = lB C
·
- lCD cos 2 2+ l CDs in 2 22+ l DE sin 5 25- 2 lC D cos 2 2
·
。
l CD s in
2 2+
lCD cos
2
2 2
+
lD Ecos
5
25+ 2 lC D sin
参考文献: [ 1] 周进雄 . 机构 动态仿真 ( 使用 M A T L A B 和 SIM U L IN K )