水平角的测量方法资料讲解
三、水平角测量
DJ2
半测回归零差 12″ 18″
一测回内2C互差 18″
同一方向值各测回互差 12″ 24″
DJ6
方向观测法记录手簿
测 站 测 回 数 目 标
读数
2C
平均值
归零后 方向值
°′″
盘左
°′″
盘右
°′″ ″ °′″
各测回 归零方 向值的 平均值
°′″
1
A B C D A
0 02 12 37 44 15 110 29 04 200 14 51 0 02 18
2
(90 03 24) 90 03 26 127 45 31 200 30 21 290 15 53 90 03 22
0 00 00 37 42 07 110 26 57 200 12 29
计算方法如下:
1.两倍照准差 2C=盘左读数-(盘右读数±180°) 2.方向值的平均值 平均读数=1/2{盘左读数-(盘右读数±180°)} 3.归零方向值 归零方向值=平均值-起始方向平均值 (括号内) 将相邻两归零方向值的平均值相减,得到水平角 值。
3.2.2 DJ6 级光学经纬仪 1、基本构造 DJ6 级光学经纬仪主要由照准部、水平度盘、 DJ6经纬仪的构造 基座三部分组成。 上部---望 远 镜 中部---水平度盘 下部---基 座 2、光学经纬仪的读数 方法 分微尺
• §3.2 光学经纬仪的结构及其度盘读数
国产光学经纬仪型号(Da di ce liang Jing wei yi) DJ07,DJ1,DJ2,DJ6,DJ30, D,J代表 “大地测量”和“经纬仪” , 07,1,2,6,30分别为一测回方向观测中误差秒数。 工程测量常用DJ6 级。 徕卡光学经纬仪型号(Theodolite) T4(0.5″),T3 (1″) ,T2 (2″) ,T1 (6″)
水平角测量和竖直角测量

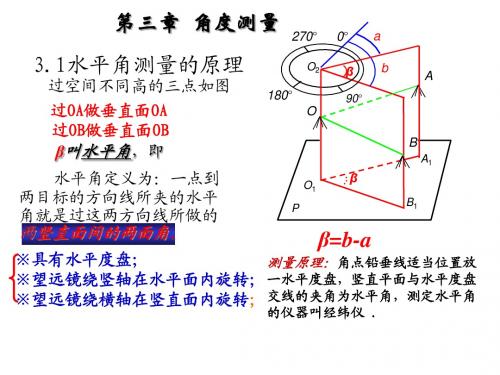
水平角测量和竖直角测量水平角测量和竖直角测量1、水平角测量原理安置经纬仪于地面O点,转动望远镜分别照准不同的目标(例如A、B 二点),就可以在水平度盘上得到方向线OA、OB在水平面上投影的读数a、b,由此即得OA、OB之间的水平角β为β=b-a2、竖直角测量的原理竖直角是同一竖直面内水平方向转向目标方向的夹角。
目标方向高于水平方向的竖直角称为仰角,a为正值,取值范围为0o~+90o;目标方向低于水平方向的竖直角称为俯角,a为负值,取值范围为0o~-90o。
经纬仪在测量竖直角时,只要照准目标,读取竖盘读数,就可以通过计算得到目标的竖直角。
3、水平角测量(测回法)设在O点安置经纬仪,采用测回法测定OA、OB两个方向之间的水平角β。
(1)上半测回(盘左)先瞄准左目标A,得水平度盘读数a1,顺时针转动照准部瞄准右目标B,得水平度盘读数b1,并算得盘左角值:β左=b1-a1,接着倒转望远镜,由盘左变为盘右。
(2)下半测回(盘右)先瞄准右目标B,得水平度盘读数b2,逆时针转动照准部瞄准左目标A,得水平度盘读数a2,并算得盘右角值:β右=b2-a2,计算角值时,总是右目标读数 b减去左目标读数a,若b<a,则应加360o。
(3)计算测回角值β:β=(β左+β右)/2(4)如果还需测第二个测回,则观测顺序同上。
4、竖直角观测竖直角的观测设A点安置经纬仪,测定B目标的竖角,其步骤如下。
盘左瞄准目标B,使指标水准管气泡居中,读取盘左的竖盘读数L,按αL=90o-L算得αL;倒转望远镜,以盘右再次瞄准目标B,使指标水准管气泡居中,读取盘右的竖盘读数R,按αR=R-270O 式算得αR;按αa=(αL+αR)/2 式盘左、盘右取平均,得B目标一测回的竖角回法测测水平角方法1.经纬仪的安置1)松开三脚架,安置于测站点上。
其高度大约在胸口附近,架关大致水平。
2)打开仪器箱,双手握住仪器支架,将仪器从箱中取出置于架关上。
水平角的测量方法
在本例中:
12(L
R)
1(981928981930)98 1929
2
*
9
a
注意!
由于水平度盘是顺时针刻划注记的,所 以计算水平角时:
总是用右目标的读数减去左目标的读数。*
如果不够减,则应在右目标的读数上加上360˚, 再减去左目标的读数,决不可以倒过来减。
10
a
对一个角度观测多个测回时:
为了减弱度盘分划误差的影响,各测回在盘左 位置观测起始方向时,需要起始方向安置水平度盘 读数。
0 02 06
* B 37 44 15 217 44 05 +10 37 44 10 37 42 00 37 42 04
C 110 29 04 290 28 52 +12 110 28 58
。 D 150 14 51 330 14 43 +8 150 14 47 。 * A 0 02 18 180 02 08 +10 0 02 13
12
a
1.方向观测法的观测方法
设O为测站点,A、B、C、D为观测点。
B A
C D
O
(1)在测站点O安置经纬仪
在A、B、C、D观测目标处竖立观测标志。
13
a
B A
C D
OLeabharlann (2)盘左位置选择一个明显目标A作为起始方向,瞄准零方向A,将水 平度盘读数安置在稍大于0˚处,读取水平度盘读数; *
顺时针方向依次瞄准B、C、D各目标,分别读取水平
(1)计算两倍视准轴误差2c值 2c =盘左读数—(盘右读数±180˚)
以OA方向为例:
2 c 0 0 2 1 2 ( 1 0 2 8 0 0 1 0 ) 8 1 2 0
水平角的测量方法
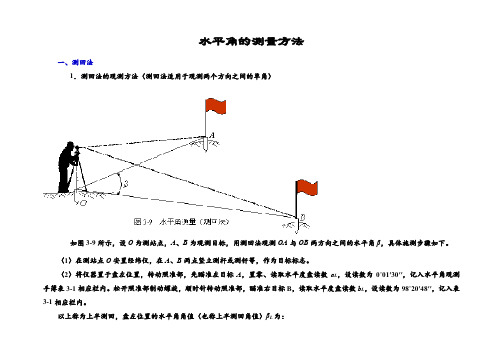
水平角的测量方法一、测回法1.测回法的观测方法(测回法适用于观测两个方向之间的单角)如图3-9所示,设O为测站点,A、B为观测目标,用测回法观测OA与OB两方向之间的水平角β,具体施测步骤如下。
(1)在测站点O安置经纬仪,在A、B两点竖立测杆或测钎等,作为目标标志。
(2)将仪器置于盘左位置,转动照准部,先瞄准左目标A,置零、读取水平度盘读数a L,设读数为0˚01′30″,记入水平角观测手簿表3-1相应栏内。
松开照准部制动螺旋,顺时针转动照准部,瞄准右目标B,读取水平度盘读数b L,设读数为98˚20′48″,记入表3-1相应栏内。
以上称为上半测回,盘左位置的水平角角值(也称上半测回角值)βL为:βL=b L-a L=98˚20′48″-0˚01′30″=98˚19′18″(3)松开照准部制动螺旋,倒转望远镜成盘右位置,先瞄准右目标B,读取水平度盘读数b R,设读数为278˚21′12″,记入表3-1相应栏内。
松开照准部制动螺旋,逆时针转动照准部,瞄准左目标A,读取水平度盘读数a R,设读数为180˚01′42″,记入表3-1相应栏内。
以上称为下半测回,盘右位置的水平角角值(也称下半测回角值)βR为:βR=b R-a R=278˚21′12″-180˚01′42″=98˚19′30″上半测回和下半测回构成一测回。
表3-1 测回法观测手簿测站竖盘位置目标水平度盘读数半测回角值一测回角值各测回平均值备注°′″°′″°′″°′″第一测回O 左A0 01 3098 19 1898 19 2498 19 30B98 20 48右A180 01 4298 19 30B278 21 12第二测回O 左A90 01 0698 19 3098 19 36B188 20 36右A270 00 5498 19 42B8 20 366OABβ均值作为一测回角值β。
在本例中,上、下两半测回角值之差为:△β=βL -βR =98˚19′18″-98˚19′30″=-12″一测回角值为:98˚19′18″+98˚19′30″98˚19′24″将结果记入表3-1相应栏内。
第二讲、水平角度测量

180° 600′′ 1 (i − 1) + 10′(i − 1) + R= i − n n 2
方向法观测手簿
水平盘读数 测 站 测 点 °′ 1 2 A 3 60 15 盘左 ″ 4 ″ 5 00 °′ 6 240 15 盘右 ″ 7 ″ 8 12 9 -12 左右 (2c)
三 竖直角测量的方法
竖直度盘的刻划也是在全圆周上刻为 360°。通常在望远镜方向上注以0°及 180°,在视线水平时,指标所指的读数为 90°或270°。竖盘读数也是通过一系列光学 组件传至读数显微镜内读取。
1、竖直角的观测方法 由竖直角的定义已知,它是倾斜视线与在同一 铅垂面内的水平视线所夹的角度。由于水平视线的 读数是固定的,所以只要读出倾斜视线的竖盘读数, 即可求算出竖直角值。但为了消除仪器误差的影响, 同样需要用盘左、盘右观测。其具体观测步骤为: 1. 在测站上安置仪器,对中,整平。 2. 以盘左照准目标,如果是指标带水准器的仪 器,必须用指标微动螺旋使水准器气泡居中,然后 读取竖盘读数L,这称为上半测回。 3. 将望远镜倒转,以盘右用同样方法照准同一 目标,使指标水准器气泡居中后,读取竖盘读数R, 这称为下半测回。
第二讲 水平角测量
Байду номын сангаас
一角度测量原理
水平角是指从空间 水平角 一点出发的两个方向在 水平面上的投影所夹的 角度;而竖直角 竖直角是指某 竖直角 一方向与其在同一铅垂 面内的水平线所夹的角 度,仰角为正,俯角为 负。
二、测回法测水平角 当所测的角度只有两个方向时,通常都 用测回法观测。在角顶O安置仪器,在A、B 处设立观测标志。经过对中、整平以后,即 可按下述步骤观测。
测站 1
测点 2 A B
第一节水平角测量原理PPT课件

3、竖盘的注记形式:天顶式或全圆式,顺时针或逆时针
第三章 角度测量
1
270
4
0
180 5
第
6
五
2
90
7
节
3
竖
直
图3-17
角
测
量
图3-18
第三章 角度测量
三、竖直角计算公式(全圆顺时针注记)
设盘左时瞄准目标的读数为L,盘右时瞄准目标的读数为R,盘左和盘
第
右位置所测竖直角分别用αL和αR,则其公式为:
第三章 角度测量
2、盘左位置,顺时针方向旋转照准部依次照准目标A、B、C、D、A,
分别读取水平度盘读数,并依次记入表3—3。其中两次照准A目标是为了
检查水平度盘位置在观测过程中是否发生变动,称为归零,其两次读数之
差,称为半测回归零差,其限差要求为:J6 级经纬仪不得超过18″,J2级
经纬仪不得超过8″。计算中注意检核。
节
具体操作方法:
经
1、垂球对中整平法步骤
纬
(1)移动或伸缩三脚架(粗略对中)
仪 的
(2)脚架头上移动仪器(精确对中) (3)旋转脚螺旋使水准管气泡居中(整平) (4)反复(2)、(3)两步。
使 用
2、光学对中整平法步骤
(1)大致水平大致对中
眼睛看着对中器,拖动三脚架2个脚,使仪器大致对中,并保持“架头”大
经
然后找出邻近的正、倒象相差180°的分划线,并注意正象应在左侧,倒象
纬
在右侧,此时便可读出度盘的度数,;再数出正象的分划线与倒象的分划
仪
线之间的格数,乘以度盘分划值的一半;最后从左边小窗中的测微尺上读 取不足10´的分数和秒数,其中分数和10〞数根据单指标线的位置和注记数
水平角的测量方法
• 目水平度盘读数 半测回角值 一测回角值
旳
°′″
°′″
。
*
°′″
A B A B
0 98 180
01 20 01
30 。98
48
42 * 98
19 19
18
*
30
*
98
19
*
24
278 21 12 *
A 90 01 06 98 19 30
*
B 188 20 36 A 270 00 54 B 8 20 36
98 19 36 98 19 42
各测回平均值
°′″
98 19 30
*
A
O
(3)盘右位置
B
瞄准右目的B,读取水平度盘读数bR。2782112* 瞄准左目的A,读取水平度盘读数aR。1800142*
下半测回
盘右位置旳水平角角值(也称下半测回角值)βR为:
R bR aR 2782112 1800142 981930 *
方向观察法观察手簿
测 站
测 回
•
数
′″
2c
平均读数
归零后方 向值
各测回归 零后方向
平均值
″ °′″
°′″
°′″
12 1
O
3
4 。 5 。6
7
8
9
A 0 02 12 180 02 00 +12 *(0 02 10) *0 00 00 *0 00 00
0 02 06
00210
将起始方向两个平均读数旳平均值,写 在起始方向平均读数栏内,并加括号。
*
(3)计算归零后旳方向值
将各方向旳平均读数减去起始方向旳平均读数(括号 内数值)。起始方向归零后旳方向值为零。
简述测回法测定水平角的方法与步骤
简述测回法测定水平角的方法与步骤
测回法测定水平角是利用水平仪测量水平角,又称水平角测量。
测回法是一种连续测量,即利用水平仪连续地移动。
其测定水平角的主要步骤如下:
一、在需要测量的起点(这一部分称为控制点)设立水平仪,放置在任意稳定的垫上,确定其正中央方位线,仪器面朝正转方向。
二、移动水平仪,步行速度约为60厘米/秒,以避免碰到地面或障碍物,注意水平仪上指针一定要处在0位。
三、用水平仪内置的物表,将地面的控制点标定水平仪指针,以读出水平角的刻度及其方向值。
四、然后,继续移动水平仪,终点位置需要与起点面积相同,也就是水平仪指针从原来的0位又转到0位。
五、将水平仪指针跨越的所有度数值累加起来,便可以得到该环形井的水平角。
测量水平角有很多方法,但是测回法对于快速、准确、精确测量水平角有较大优势,更能满足工程项目的要求。
因此,测回法测定水平角在工程中的应用非常广泛。
水平角的测量方法
水平角的测量方法水平角是在水平面上衡量两个方向之间的角度,通常用于测量照相测量和地图绘制等领域。
测量水平角在实际应用中非常重要。
本文将介绍三种测量水平角的方法:经典基线法、内角之和法和方位角法。
一、经典基线法经典基线法是通过在一个平面内的基线测量两个方向的方法来测量水平角。
该方法适用于相邻的控制点之间的角度测量,并且需要精确的测量仪器,例如经纬仪或现代全站仪。
步骤如下:1. 在两个相邻控制点之间确定一个基线,根据基线所在方向的角度确定起始方向。
2. 将测量设备置于起始点,并将第一个方向读数。
3. 将测量设备移动到基线的另一端,在另一个方向上取另一个读数。
4. 将两个测量角度相加,以得到两个方向之间的水平角度。
5. 重复以上步骤以对所有角度进行测量。
二、内角之和法内角之和法是通过测量一个多边形的所有内角之和来计算水平角的。
该方法适用于需要精确测量多个角度的情况,例如测量地图上的角度。
1. 在多边形内部找到所有角的测量位置,并将角度读数记录下来。
2. 将所有内角的度数相加,以得到多边形的内角之和。
3. 使用多边形内部的角测量位置来确定每个角的测量位置。
4. 使用计算机或手动计算的方法,以内角之和和每个角的度数计算出每个角的度数。
三、方位角法1. 在地图上确定两个测量点,并通过测量设备确定它们之间的水平距离。
2. 使用测量设备确定第一个点与正北方向之间的方位角。
总之,测量水平角需要仔细的计划和执行,还需要精确的测量工具和技能。
然而,三种方法都可以提供非常准确和可靠的结果,使其在地图制作、建筑测量和景观设计等领域中得到广泛应用。
第3章 角度测量(水平角测量)讲解
1. 测回法(Method of Observation Set)
在测站点B安置经纬仪,按下列顺序进行观测:
(1)盘左位置精确瞄准左方目标C,并读数;
(2)松开照准部制动螺旋,顺时针旋转照准部,精 确瞄准右方目标A,并读数。此为上半测回观测 (即盘左观测)。
三、电子经纬仪(Electronic Theodolite)-自己去看看
电子经纬仪的轴系、望远镜和制动、微动构件 与光学经纬仪类似,不同之处在于电子经纬仪 用微处理机控制的电子测角系统代替光学读数 系统,能自动显示测量数据并存储。
2. 编码度盘测角系统
将度盘均匀分成16个区间,从里到外有四道环 (码道)。每个区间的码道分为白色透光区(或 导电区)和黑色非透光区(或非导电区)。设透 光为0,非透光为1,则区间的状态可用二进制编 码表示,见下表。
间的夹角越小,条纹越
粗,即相邻明条纹
(或暗条纹)之间的间
隔越大。条纹亮度按正
弦周期性变化。
设d是光栅度盘相对于固定光栅的移动量,ω是莫尔条纹在 径向的移动量,两光栅间的夹角为θ,则其关系式为:
d cot
由上式可见,只要两光栅之间的夹角较小,很小的光栅 移动量就会产生很大的条纹移动量。
光栅度盘下面是一个发光管,上面是一个可与光栅度盘 形成莫尔条纹的指示光栅,指示光栅上面为光电管。若发光 管、指示光栅和光电管的位置固定,当度盘随照准部转动时, 由发光管发出的光信号通过莫尔条纹落到光电管上。度盘每 转动一条光栅,莫尔条纹就移动一周期。通过莫尔条纹的光 信号强度也变化一周期,所以光电管输出的电流就变化一周 期。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
为了校核,再次瞄准零方向A,称为半测回归零,读取 水平度盘读数。 *
2020/6/5
2020/6/5
零方向A的两次读数之差的绝对值,称
为半测回归零差。 归零差不应超过相应的规定。
具体规定是:幻灯片 24
如果归零差超限,应重新观测。幻灯片 15
O 的 C 归零 1 1 2 后 8 5 0 8 0 方 0 2 1 0 向 1 1 2 值 6 4 0 8
O的 D归 零 1 5 1 后 4 4 0 7 0 方 0 2 1 0 向 1 5 1 值 2 3 0 7
*
2020/6/5
(4)计算各测回归零后方向值的平均值
多测回观测时,同一方向值各测回互差,符合 规定,则取各测回归零后方向值的平均值。 *
00210
将起始方向两个平均读数的平均值,写 在起始方向平均读数栏内,并加括号。
*
2020/6/5
(3)计算归零后的方向值
将各方向的平均读数减去起始方向的平均读数(括号 内数值)。起始方向归零后的方向值为零。
O的 B 归零 34 7 4 后 1 0 0 方 0 2 1 0 向 34 7 2 值 0 0
以上称为上半测回。
2020/6/5
B A
C D
O
(3)盘右位置 逆时针方向依次照准目标A、D、C、B、A。
并将水平度盘读数由下向上记入观测表中。 * 以上称为下半测回。
2020/6/5
上、下两个半测回合称一测回。 需要观测n个测回,则各测回起始方向仍 按180˚/n的差值,安置水平度盘读数。
幻灯片 15
*
2020/6/5
注意!
由于水平度盘是顺时针刻划注记的,所 以计算水平角时:
总是用右目标的读数减去左目标的读数。* 如果不够减,则应在右目标的读数上加上360˚, 再减去左目标的读数,决不可以倒过来减。
2020/6/5
对一个角度观测多个测回时:
为了减弱度盘分划误差的影响,各测回在盘左 位置观测起始方向时,需要起始方向安置水平度盘 读数。
上半测回和下半测回构成一测回。
2020/6/5
(4)对于DJ6型光学经纬仪,如果上、
下两半测回角值之差不大于±40″,即|βL—
βR|≤40″,认为观测合格。
*
可取上、下两半测回角值的平均值作为一测
回角值β。即
12(L R)
在本例中:
12(LR)1(ຫໍສະໝຸດ 81918981930)98 1924
2
安置起始方向水平度盘读数的办法:
根据测回数n,以180˚/n的差值,进行水平度盘 读数的安置。 *
对DJ6经纬仪,各测回角值互差如果不超 过±40″,取各测回角值的平均值作为最后角 值。 *
2020/6/5
二、方向观测法
方向观测法简称方向法,也称全圆方向 观测法或全圆测回法。 适用于在一个测站上观测两个以上的方向。
2020/6/5
2020/6/5
A
O
(3)盘右位置
B
瞄准右目标B,读取水平度盘读数bR。27 218 12 * 瞄准左目标A,读取水平度盘读数aR。18 01 0 42*
下半测回
盘右位置的水平角角值(也称下半测回角值)βR为:
2R 020 /6/5 bRaR 2 2 7 1 1 2 8 1 0 8 1 4 2 0 98 1930*
平均读 1盘 数 左 ( 读盘 数右 18读 ) 0 数 2 以OB方向为例:
平 均 13读 4 7 4 1 5 数 (2 1 4 4 0 7 5 1 8 )0
2
37 4410
*
2020/6/5
起始方向有两个平均读数,故应再取其 平均值。
起始方向平均 均值 1读 (00数 206的 00平 213) 2
2020/6/5
1.方向观测法的观测方法
设O为测站点,A、B、C、D为观测点。
B A
C D
O
(1)在测站点O安置经纬仪
在A、B、C、D观测目标处竖立观测标志。
2020/6/5
B A
C D
O
(2)盘左位置
选择一个明显目标A作为起始方向,瞄准零方向A,将水 平度盘读数安置在稍大于0˚处,读取水平度盘读数; *
2020/6/5
2.方向观测法的计算方法
(1)计算两倍视准轴误差2c值 2c =盘左读数—(盘右读数±180˚)
以OA方向为例:
2 c 0 0 2 1 2 ( 1 0 2 8 0 0 1 0 ) 8 1 2 0
*
2020/6/5
(2)计算各方向的平均读数
平均读数又称为各方向的方向值。
第四节 水平角的测量方法
2020/6/5
水平角测量的方法
测回法 方向观测法
2020/6/5
一、测回法
测回法适用于观测两个方向之间的 单角,是水平角观测的基本方法。
2020/6/5
1.测回法的观测方法
设O为测站点,A、B为观测目标,用测回法观测OA与 OB两方向之间的水平角β。
A
O B
(1)在测站点O安置经纬仪,在A、B两点竖立测杆或 测钎等,作为目标标志。
各测回归零后方向值的平均值
O 方 B 1 (向 3 4 2 7 0 0 3 4 2 7 0 7 ) 3 4 2 7 0 4 2
*
(5)计算各目标间水平角角值
2020/6/5
2020/6/5