模拟量控制驱动器
SD30MT交流伺服说明书全中文
SD15MT SD20MT SD30MT SD50MN本说明书主要为用户提供驱动器的使用方法、系统参数、技术指标。
由于使用不当或错误的操作,可能会导致意外事故发生并影响产品的性能和使用寿命,为使本产品更好地发挥其性能和更好地为您服务,请您务必在产品使用前认真阅读本说明书。
在产品使用过程中如遇到不解的地方请查阅说明书或拨打我们的技术支持电话。
请您将对交流伺服驱动器的意见和更高要求告知我们,我们会在最短的时间内满足您的要求。
【注】☆由于产品的改进,手册内容可能变更,恕不另行通知。
☆驱动单元及电机内不包含任何维修配件,请勿私自拆卸;对驱动单元及电机的任何改动将使其保修权利失效;本公司也不对由此引起的后果承担任何责任。
☆阅读本手册前,请遵守以下安全防范说明。
警示标志:————危险:表示错误的操作将可能导致人员伤亡!————小心:表示错误的操作将可能对人员造成伤害并损坏设备或产品!————注意:表示错误的操作将可能损坏设备或产品!危险:Danger本产品的设计和制造并非是为了使用在对人身安全有威胁的机械和系统中。
用户的机械和系统选用本产品时,须在设计和制造中考虑安全防护措施,防止因操作不当或本产品异常而引发意外事故。
伺服驱动器即使断电后,高压仍会保持一段时间,断电后5分钟内请勿拆卸电线,不得触摸端子排。
参与拆卸与维修的人员必须具备相应的专业知识和工作能力。
小心:损坏或有故障的产品不可投入使用。
必须按产品储运环境条件储存和运输。
搬运伺服电机时,不得拖曳电线、电机轴和编码器。
伺服驱动器及伺服电机不得承受外力及撞击。
避免振动,严禁承受冲击。
受损或零件不全时,不得进行安装。
ll.必须安装在有足够防护等级的控制柜内。
必须与其它设备间保留足够的间隙。
必须有良好的散热条件。
防止尘埃、腐蚀性气体、导电物体、液体及易燃易爆物质侵入。
安装务必牢固,防止因振动松脱。
防止液体侵入损坏电机和编码器。
禁止敲击电机和电机轴,以免损坏编码器。
伺服电机的三种控制方式有哪些
伺服电机是在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
在不同场景下,伺服电机的控制方式各有不同,在进行选择之前你需要先了解伺服电机是三种控制方式各有其特点,下面小编就给大家介绍一下伺服电机的三种控制方式。
伺服电机控制方式有脉冲、模拟量和通讯控制这三种1、伺服电机脉冲控制方式在一些小型单机设备,选用脉冲控制实现电机的定位,应该是最常见的应用方式,这种控制方式简单,易于理解。
基本的控制思路:脉冲总量确定电机位移,脉冲频率确定电机速度。
都是脉冲控制,但是实现方式并不一样:第一种,驱动器接收两路(A、B路)高速脉冲,通过两路脉冲的相位差,确定电机的旋转方向。
如上图中,如果B相比A相快90度,为正转;那么B相比A相慢90度,则为反转。
运行时,这种控制的两相脉冲为交替状,因此我们也叫这样的控制方式为差分控制。
具有差分的特点,那也说明了这种控制方式,控制脉冲具有更高的抗干扰能力,在一些干扰较强的应用场景,优先选用这种方式。
但是这种方式一个电机轴需要占用两路高速脉冲端口,对高速脉冲口紧张的情况,比较尴尬。
第二种,驱动器依然接收两路高速脉冲,但是两路高速脉冲并不同时存在,一路脉冲处于输出状态时,另一路必须处于无效状态。
选用这种控制方式时,一定要确保在同一时刻只有一路脉冲的输出。
两路脉冲,一路输出为正方向运行,另一路为负方向运行。
和上面的情况一样,这种方式也是一个电机轴需要占用两路高速脉冲端口。
第三种,只需要给驱动器一路脉冲信号,电机正反向运行由一路方向IO信号确定。
这种控制方式控制更加简单,高速脉冲口资源占用也最少。
在一般的小型系统中,可以优先选用这种方式。
2、伺服电机模拟量控制方式在需要使用伺服电机实现速度控制的应用场景,我们可以选用模拟量来实现电机的速度控制,模拟量的值决定了电机的运行速度。
模拟量有两种方式可以选择,电流或电压。
电压方式,只需要在控制信号端加入一定大小的电压即可。
实现简单,在有些场景使用一个电位器即可实现控制。
ED96R941_AME55-56

• 通电。注意,驱动器将立即执行行程自检功 能。
• 给出相应的控制信号,观察阀门的动作方向与 应用情况是否相符。
• 确保驱动器能根据给定的相应信号驱动阀体 运行整个行程。自行确定该阀门的行程长度。
2000 8
24; ± 10%
50/60 0-10 (2-10) Ri = 24 kΩ 0-20 (4-20) Ri = 500 Ω
0-10 (2-10)
40
200 0 ... 55 –40 … 70
II IP 54 3.8
AME 56 19.5
1500 4
低压遵循 73/23/EEC,EMC 符合 2006/95/EEC:EN 60730-1、EN 60730-2-14
电气连接 打开驱动器外壳,即可进行电气连接。驱动器外壳 上有两个 M16 × 1.5 穿线孔。两个穿线孔都带有橡 胶索环垫圈,以便柔性线缆穿过。注意,为了保持 整个驱动器外壳的防护 等级,必须使用相应的电 缆护口。
废弃之前,必须将驱动器拆解,并将元件分类。
2
ED.96.R9.41 © Danfoss 09/2014
适配器 065Z0312
AME 55, AME 56 + VFS 2 (DN 65 - 100)
AME 55, AME 56 + VL 2 (DN 100)
VF 2 (DN 100 - 150)
AME 55, AME 56 + VL 3 (DN 100)
VF 3 (DN 100 - 150)
AME 55, AME 56 + AFQM DN 65-125 PN 16
GTHD调试总结--汪敏
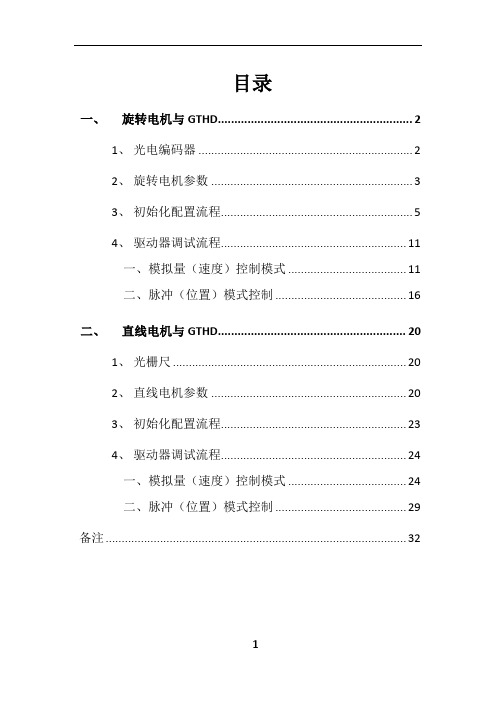
目录一、旋转电机与GTHD (2)1、光电编码器 (2)2、旋转电机参数 (3)3、初始化配置流程 (5)4、驱动器调试流程 (11)一、模拟量(速度)控制模式 (11)二、脉冲(位置)模式控制 (16)二、直线电机与GTHD (20)1、光栅尺 (20)2、直线电机参数 (20)3、初始化配置流程 (23)4、驱动器调试流程 (24)一、模拟量(速度)控制模式 (24)二、脉冲(位置)模式控制 (29)备注 (32)一、旋转电机与GTHD1、光电编码器使用普通旋转伺服电机(交流永磁伺服旋转电机)需要用到光电编码器(一种反馈器件,提供位置、速度等信息),光电编码器有两种---增量式编码器和绝对式编码器。
两者的区别在于前者只能知道相对于上电位置的相对位置,后者可以知道当前的绝对位置(位置唯一)。
一般旋转伺服电机都会使用到增量式编码器,说到编码器就需要知道编码器的一项重要性能指标---分辨率(mencres,单位:LRP。
也叫刻线数),也可以用每转脉冲数表示。
电机光电编码器的分辨率有下列几种,10进制的有2000/5000/10000,二进制的有1024/2048/4096/8192。
编码器计数是通过A、B两项信号的信号沿得到的,一个周期内有四个沿,所以每转脉冲数等于分辨率乘以四,而A、B两项信号相差90度。
2、旋转电机参数使用编码器时需要用到下面几个参数:feedbacktype的值须与电机实际反馈类型(接线方式)相符,对于增量式光电编码器反馈,该值设为2menctype的值跟接线有关,主要看有没有接I(index)向和Halls (霍尔:确定转子位置,从而知道输入电流状态)信号。
大多数旋转电机都是带有I向和Halls信号,所以menctype值设为0,而不带Halls 信号的menctype值设为2,这个时候就需要会用到一种代替Halls信号作用的寻找转子的软件方式phasefind(驱动器第一次上伺服时会自动寻找,不断电情况下一般不需要再次寻找,除非电机飞车)。
S7-1200运动控制
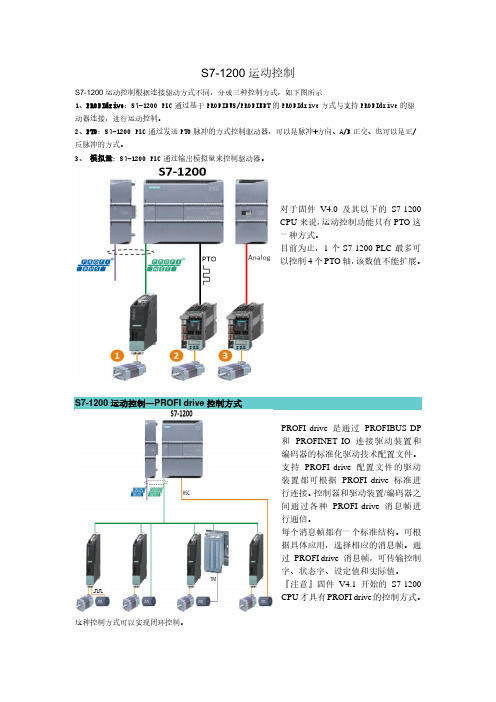
S7-1200运动控制S7-1200运动控制根据连接驱动方式不同,分成三种控制方式,如下图所示1、PROFIdrive:S7-1200 PLC通过基于PROFIBUS/PROFINET的PROFIdrive方式与支持PROFIdrive的驱动器连接,进行运动控制。
2、PTO:S7-1200 PLC通过发送PTO脉冲的方式控制驱动器,可以是脉冲+方向、A/B正交、也可以是正/反脉冲的方式。
3、模拟量:S7-1200 PLC通过输出模拟量来控制驱动器。
对于固件V4.0及其以下的S7-1200CPU来说,运动控制功能只有PTO这一种方式。
目前为止,1个S7-1200 PLC最多可以控制4个PTO轴,该数值不能扩展。
S7-1200 运动控制—PROFI drive控制方式PROFI drive 是通过PROFIBUS DP和PROFINET IO 连接驱动装置和编码器的标准化驱动技术配置文件。
支持PROFI drive 配置文件的驱动装置都可根据PROFI drive 标准进行连接。
控制器和驱动装置/编码器之间通过各种PROFI drive 消息帧进行通信。
每个消息帧都有一个标准结构。
可根据具体应用,选择相应的消息帧。
通过PROFI drive 消息帧,可传输控制字、状态字、设定值和实际值。
『注意』固件V4.1开始的S7-1200CPU才具有PROFI drive的控制方式。
这种控制方式可以实现闭环控制。
S7-1200 运动控制--PTO控制方式PTO的控制方式是目前为止所有版本的S7-1200 CPU都有的控制方式,该控制方式由CPU向轴驱动器发送高速脉冲信号(以及方向信号)来控制轴的运行。
这种控制方式是开环控制。
S7-1200 运动控制--模拟量控制方式固件V4.1开始的S7-1200 PLC的另外一种运动控制方式是模拟量控制方式。
以CPU1215C为例,本机集成了2个AO点,如果用户只需要1或2轴的控制,则不需要扩展模拟量模块。
0-20ma模拟量输出功能应用场景

0-20ma模拟量输出功能在各种工业领域中有着广泛的应用场景,其作用主要是将数字信号转换为模拟电流输出,从而实现对各种控制设备的精确控制。
下面将重点介绍0-20ma模拟量输出功能的应用场景及其在各个领域中的具体应用。
一、工业自动化领域1. 工业生产过程控制0-20ma模拟量输出功能可以应用于工业生产过程中的各种参数控制,如温度、压力、流量等。
通过对参数进行精确的模拟量输出控制,可以实现对生产过程的精准控制,提高生产效率和产品质量。
2. 机械设备控制在工业机械设备控制中,0-20ma模拟量输出功能可以用于控制各种传感器、执行器和驱动器,如电动阀门控制、电机转速控制等。
这对于确保机械设备的稳定运行和精准控制至关重要。
二、环境监测领域1. 大气环境监测在大气环境监测领域,0-20ma模拟量输出功能可以应用于各类气体传感器、温湿度传感器等环境监测设备,实现对大气环境参数的实时监测和控制,为环境保护和治理提供重要数据支持。
2. 水质监测对于水质监测设备来说,0-20ma模拟量输出功能也起到了至关重要的作用。
通过对水质传感器输出的模拟信号进行精确控制,可以实现对水质波动的实时监测和控制,确保水质稳定和安全。
三、能源领域1. 发电厂参数控制在发电厂中,各种参数控制对于保障发电设备的安全稳定运行具有至关重要的意义。
0-20ma模拟量输出功能可以应用于发电厂的各类参数控制设备,如温度控制、压力控制等,确保发电设备在正常参数范围内运行。
2. 能源监测与控制能源监测与控制是实现节能和环保的重要手段。
0-20ma模拟量输出功能可以应用于各种能源监测设备,如电能表、水能表等,实现对能源使用情况的精准监测和控制,为能源节约和环保做出积极贡献。
0-20ma模拟量输出功能在各种工业领域中有着广泛的应用场景,其精确的模拟量输出控制功能为各种传感器、执行器和监测设备的精准控制提供了重要支持,促进了工业自动化、环境监测和能源领域的发展和进步。
AME_855_VDIRM241_CN

电动驱动器 AME 855参数表说明驱动器主要用于在区域供热/制冷和暖通空调系统中,根据控制器的指令来调节阀门。
AME 855 驱动器由电子控制器通过模拟量或三点信号进行控制。
驱动器可以配合 VF3 阀门使用(DN 200-300)。
特点:• 三点或模拟量控制• 便于手动操作(R 接线端监控)• 位置指示• L ED 信号• 正向或反向切换功能• 自动根据阀门末端位置调整其行程,缩短调试 时间• 电压或电流信号输入 Y • 电压或电流信号输出 X (电流输出时须另配附件)• 防冻保护功能(详细信息,请参阅参数表的“功能”版块)• 阻塞检测• 内部温度控制 – 内置电热器 + 过热保护• 线缆断路探测(仅模拟量调节信号控制驱动器)• 可选回差• 自动测试功能• 自动暂停功能• 零电势位置开关(配件)• 远程复位功能主要数据:• 工作电压: - 24 V AC- 115 V 或 230 V AC • 控制输入信号:三点或模拟量• 扭矩:15.000 N • 80 mm • 2 s/mm• 最高介质温度:130 °C订购配件型号代码电流输出 PCB 082G3512位置开关 (2×) PCB082G3513驱动器图片型号电源(V)代码AME 85524082G3510230/115082G3511参数表电动驱动器 AME 855技术参数电源V24 (AC) 或 115 / 230 (AC); ±10%功耗VA 50 (24V) 63 (230V)频率Hz50 / 60控制输出 Y 1)0 – 10 V DC; 77 kOhm 2 – 10 V DC; 77 kOhm 0 – 20 mA; 510 Ohm 4 – 20 mA; 510 Ohm反馈输出 X 0 – 10 V DC; ≥1200 Ohm; I = 8 mA(最高)0 – 20 mA; ≤500 Ohm4 – 20 mA; ≤500 Ohm扭矩N15000最大行程mm80速度s/mm2最高介质温度°C 130环境温度–10 … +50储存和运输温度-20 … +65防护等级II防护等级IP 54重量kg11 (24V) 11,4 (230V)手动操作机械-标准认证标识指令 2006/42/EC委员会指令 2004/108/EC 委员会指令 2006/95/EC1)当 Y 信号选定为 2-10 V DC 或 4-20 mA 时,X 信号的起始点为 0-10V DC 或 0-20 mA废弃处理弃置之前,必须将驱动器拆解,并将元件分类。
AMC(Advanced Motion Controls)模拟量伺服驱动器

电 源 范 围 峰值电流 连续电流 工作电压 25A 12.5A 20-80VDC
特 u u u u u u 四象限再生操作 使用 DIP 开关选择模式 限制电流可调 高斩波频率 差分输入指令 错误监控输出
性 u u u u u u 内部自测试电位器 零漂调节电位器 输入增益可调 驱动器状态指示 LED 电流检测输出 方向禁止输入
模拟伺服驱动器25a8直流输入电压范围vdc2080直流母线过压限制vdc86最大峰值输出电流25最大连续输出电流125连续电流下的最大功率损耗50最小负载电感线线200开关频率khz2210v模拟电压支持的反馈信号测速发电机折算方法外部的工作模式电流模式ir补偿模式测速发电机模式电压模式支持的电机类型有刷直流电机音圈硬件保护尺寸长宽高mmin12937582515131重量goz28099散热器底座温度范围06532149储存温度范围408540185外观独立式p1接口16脚间距254mm摩擦锁头p2接口脚间距508mm螺丝端子注意
3
单位 mm(in) g(oz) ℃(℉) ℃(℉) -
值 129.3×75.8×25.1(5.1×3×1) 280(9.9) 0-65 (32-149) -40-85(-40-185) 独立式 16 脚,间距 2.54mm, 摩擦锁头 5 脚,间距 5.08mm, 螺丝端子
最小电感适用于母线电压远低于最高电压的情况,若不能满足条件可使用外部电感。 为达到最佳的性能,需要增加额外的冷却设备或散热器。
自测试
零漂调节
模式选择表
SW1 电流模式 电压模式 IR 补偿模式 测速发电机模式 OFF ON ON OFF SW3 ON OFF OFF OFF
电位器功能
电位器 1 2 3 4 描述 在电压和速度模式中,用来调节环路增益,电流模式时逆时针转动至最大。 限制电流调节。 此电位器用来设定峰值和连续限制电流值, 但保持它们之间的比 例不变。 顺时针转动 增加增益。 提高限制值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
废弃处理
废弃之前,必须将驱动器拆解,并将元件分类。
2
VD.AB.R5.41 © Danfoss 09/2014
DEN-SMT/SI
参数表 DIP 开关设定
模拟量控制驱动器,AME 85 和 AME 86
ݒၠ Ⴤ ෙۅ/RL ၍Ⴀୁଉ༬Ⴀ ࢤ Kvs ް࿋
ኟၠ Բ૩ ܔຕୁଉ༬Ⴀ 100% Kvs ް࿋
• 手动操作
驱动器 型号
AME 85 AME 86
电源 24 V~ 24 V~
速度 8 s/mm 3 s/mm
代码 082G1452 082G1462
配件 型号 阀杆电热器
代码 065Z7021
型号 电源 功耗 频率
控制输入 Y
输出信号 X 电磁兼容性 扭矩 最大行程 速度 最高介质温度 环境温度 储存和运输温度 环境等级 防护等级 重量
IEC 801/2 - 5
5000
40
8
3
200
0 - 55
- 40至+70
II
IP 54
9.8
10.0
低压指令 73/23/EEC, 93/68/EEC, EN 60730/2/14
电磁兼容指令 89/336/EEC, 92/31/EEC, 93/68/EEC, EN 50081-1, EN 50082-1
参数表
模拟量控制驱动器 AME 85, AME 86
说明
订购 技术参数
DEN-SMT/SI
驱动器 AME 85 和 AME 86配合 VFM 2 (DN 150-250), VFS 2 (DN 65-100), VF2/3 (DN 125, 150) 和 AFQM (DN150-250) 阀体使用。
• 隔离被控制的介质。(例如,如果在蒸汽应 全开或全关位置(取决于阀门型号)。
用中进行行程自检时不采取适当的机械隔离
措施将引起危险)。
• 通电。注意,驱动器将立即执行行程Байду номын сангаас检功能。
• 给出相应的控制信号,观察阀门的动作方向
与应用情况是否相符。
• 确保驱动器能根据给定的相应信号驱动阀体
运行整个行程。自行确定该阀门的行程长度。
在 OFF 位置时,驱动器根据模拟量控制信号来工 作。在 ON 位置时,驱动器作为三点驱动器来工作。 • SW7:LOG/LIN - 阀门线性或等比流量选择开关1: 在 OFF 位置时,阀门流量与控制信号成等比关系。 在 ON 位置时,阀门流量与控制信号成线性关系。
• SW8:100% KVS/Reduced KVS - 阀门流量限制选择 开关1:
DEN-SMT/SI
VD.AB.R5.41 © Danfoss 09/2014
7
参数表
模拟量控制驱动器,AME 85 和 AME 86
8
VD.AB.R5.41
Produced by Danfoss A/S © 09/2014
• SW3:D/I - 正向/反向动作选择开关: 在 OFF 位置时,驱动器正向动作(电压升高时阀杆 降低)。在 ON 位置时,驱动器反向动作(电压升高 时阀杆升高)。
• SW4:—/Seq - 标准模式或分段模式选择开关: 如果开关设在 OFF 位置,驱动器的工作范围为0(2) 到 10 V 或 0(4)到 20 mA 。如果开关设在 ON 位置, 驱动器的工作范围为 0(2)到5(6)V 或 (0(4)到10 (12) mA)或 (5(6)到10V)或 (10(12)到20mA 。
- 标准认证标识
VD.AB.R5.41 © Danfoss 09/2014
V VA Hz V mA V
N mm s/mm
°C
kg
AME 85
AME 86
24 AC +10 至 –15%
12.5
25
50 /60
0-10 (2-10) Ri = 50 Ω,
0-20 (4-20) Ri = 500 Ω
0-10 (2-10)
SN
24 V
SP
0V
1 24 VAC
3
电源 中性
输入
4
VD.AB.R5.41 © Danfoss 09/2014
DEN-SMT/SI
参数表 调试
手动操作
模拟量控制驱动器,AME 85 和 AME 86
完成机械和电气安装并进行必需的检查与测试后: 调试/测试功能
将 SP 连接到接线端1或3,可使驱动器驱动阀门到
特点:
• 行程自检功能 • 负载相关的"关闭"功能可以防止过载 • 手动操作 • LED 指示灯
主要数据:
• 额定电压: - 24 VAC, 50 Hz/60 Hz
• 控制输入信号: - 0(4)…20 mA - 0(2) - 10 V
• 驱动力:5000 N • 行程:40 mm • 速度:8 s / mm( AME 85),3 s / mm( AME 86) • 最高介质温度:200 °C
1
参数表 安装
模拟量控制驱动器,AME 85 和 AME 86
机械连接 安装驱动器时,必须水平或竖直向上安装于阀体 上。用随货附带的 57 mm 压紧圈将驱动器安置在 阀体上。安装驱动器时,用 8 mm 内六角扳手拧紧 锁定螺丝以免阀体转动。 安装时应注意留出适当的空间以便维护。 电气连接 打开驱动器外壳,即可进行电气连接。提供两个 M16 × 1.5 穿线孔。两个穿线孔都带有橡胶索环 垫圈,以便柔性线缆穿过。注意,为了保持整个驱 动器外壳的防护 等级,必须使用相应的电缆护口。
在 OFF 位置时,阀门流量不会减少。在 ON 位置时, 阀门流量减少为标准值增量 kVS 值的一半。例如: 阀门 kVS 16 且 SW8 在 ON 位置时,阀门的最大流量 则为 KVS13(即标准 kVS 16 和 kVS 10 的中间值)。
1 注意:仅适用于等百分比特性的阀门组合。
DEN-SMT/SI
VD.AB.R5.41 © Danfoss 09/2014
5
参数表 尺寸
模拟量控制驱动器,AME 85 和 AME 86
ፌٷኵ ፌၭኵ
6
VD.AB.R5.41 © Danfoss 09/2014
DEN-SMT/SI
参数表
驱动器 - 阀门 组合
模拟量控制驱动器,AME 85 和 AME 86
该设备调试完毕。
(1)移去垫圈 (2)推 (3)旋转
转动8毫米内六角扳手(用户自备)至指定位置,即 转为手动操控。观察旋转箭头的方向。
• 断开电源 • 移去垫圈,按下按钮 • 用 8mm 内六角扳手调整阀门位置 • 将阀门关到全关位置 • 重新上电 注意: 驱动器将按照 Y 信号的要求。
AME 85/86 + VFS 2 (DN 65 - 100) AME 85/86 + VF 2 (DN 125 - 150) AME 85/86 + VF 3 (DN 125 - 150)
AME 85/86 + VFM 2 (DN 150-250)
AME 85/86 + AFQM (DN 150 - 250)
DIP 功能选择开关位于驱动器可拆卸顶盖下方。请 注意当 SW6 在 ON 位置时,该驱动器将作为三点驱 动器。
该系列开关具有以下功能:
• SW1:U/I - 输入信号类型选择开关: 在 OFF 位置时,为电压输入。在 ON 位置时,为电 流输入。
• SW2:0/2 - 输入信号范围选择开关: 在 OFF 位置时,输入信号范围为 2-10 V(电压输入) 或者 4-20 mA(电流输入)。在 ON 位置时,输入信 号范围为 0-10 V(电压输入)或者 0-20 mA(电流 输入)。
• SW5:0..5V/5到 10V - 分段模式下的输入信号范 围:
如果开关设在 OFF 位置,驱动器的工作范围为 0(2) 到5 (6) V 或 0(4)到10 (12) mA。如果开关设在 ON 位置,驱动器的工作范围为5(6)到 10 V 或 10(12) 到 20 mA 。
• SW6:Prop./3-pnt - 模拟量调节模式或三点模式 选择开关:
• SW9:复位开关: 开关位置改变时,驱动器将执行一次行程自检循环。
DEN-SMT/SI
VD.AB.R5.41 © Danfoss 09/2014
3
参数表 接线
仅用于 24 Vac 电源。
模拟量控制驱动器,AME 85 和 AME 86
接线长度 0 - 50 m > 50 m
推荐的 线径 0.75 mm2 1.5 mm2
阀门行程自检功能 电源首次接通时,驱动器将自动检测阀门行程。 此后,只要改变 SW9 位置,便可重新启动行程自 检功能。
LED 指示灯 红色的 LED 指示灯位于顶盖下的印刷电路板上。 它可以显示三个运行状态:
• 驱动器正常(常亮); • 行程自检(每秒闪烁一次); • 故障(每秒闪烁三次 - 请寻求技术支持)。
DIP 6 = 关闭
SN
0V
SP
24 VAC
0(2)-10 VAC Y
0(4)…20 mA
1 24 VAC
3
X
0(2) - 10 V
中性 电源 输入
输入
输出
配有继电器输出的控制器
DIP 6 = 打开
SN
0V
SP
24 VAC
1 24 VAC
3
X
0(2)-10 VDC
零线 电源
输入
输出
配有双向可控硅输出的控制器 DIP 6 = 打开