机械原理英文版答案
机械原理习题集英汉双语教学课件ppt作者张春林试卷答案

试卷1一、填空题(20分)1.等于。
2.不变,变大。
3.法面模数相等、法面压力角相等、螺旋角大小相等方向相反。
4.惰(或介)轮。
5.加大基圆半径,加大偏距。
6.棘轮机构、槽轮机构、不完全齿轮机构。
7.1)曲柄摇杆机构、2)双曲柄机构、3)双摇杆机构。
8.死点位置,γ=0。
9.周期性、高速。
10.惯性力,惯性力惯性力矩。
二、(12分)F =3n -(2p l +p h )=3×8-(2×11+1)=1B 处为局部自由度,E 处为复合伎链,LK 杆及其运动副为虚约束,H 与I 有一个移动副为虚约束。
三、(10分)四、(14分)l.1212121)1()(a z i m z z m +=+=mz 1=80若m =3,z 1=26.6,为非整数,不行;若m =4,z 1=20,可以;若m=5,z 1=16<17,z 1根切,不行。
所以取m =4mm ,z 1=20,z 2=302.mm m h mz a a 64r *2212=+=,mm mz 60r 2212==mm mz b 38.56cos r 2212==α,mm m c h mz a f 55)(r **2212=+-=3.图中理论啮合线为N 1N 2段,实际瞄合线为B 1B 2段。
见图2。
五、(14分)4、5、6组成定轴轮系:i 46=ω4/ω6=-2.5(1)1、2、3及6(系杆)组成周转轮系:6.413636113-=-=--=z z i H ωωωω(2)由(1)得ω4=-2.5ω6,则ω3=ω4=-2.5ω6,代入(2)得:i 16=17.1。
齿轮6的转向与ω1相同。
六、(10分)见图3。
︒=︒+-=3611K K θ(1)任选一点D ,以D 为顶点作等腰△DC 1C 2,DC 1=DC 2=50mm ,∠C 1DC 2=40°(μl =0.001m/mm);(2)作∠C 1C 2P =90°,∠C 2C 1P =90°-θ=54°,C 2P 与C 1P 交于P 点;(3)作直角△C 1C 2P 的外接圆;因为C 1C 2=2l DC sin20°=34.2mm ,又△AC 1C 2中:C 1C 22=(l BC +l AB )2+(l BC -l AB )2-2(l BC +l AB )(l BC -l AB )cos θ,解得l AB ≈7.7mm 。
机械原理 第七版 课件 答案

2020/10/24
19
认真对待教学的每一个环节
本课程全部教学工作的完成,需要自学、听课、习 题课、实验课、课后作业、答疑和考试,以及课程设 计等教学环节。要学好这门课,必须对每个教学环节 予以充分重视。
结构分析
机构运动的可能性、确定性 机构的组成原理
运动学分析 位置、位移、速度、加速度分析
静力学分析 动力学分析
2020/10/24
机构的自锁性、力的传递关系 机构中力和质量与运动的关系
速度波动的调节
机构的惯性力平衡
15
设计机构
根据给出的运动和动力要求,设计出机构或机构 的组合系统来满足这一运动和动力要求。
§
好的事情马上就会到来,一切都是最 好的安 排。上 午7时13分3秒 上午7时 13分07:13:0320.10.24
§
一马当先,全员举绩,梅开二度,业 绩保底 。20.10.2420.10.2407:1307:13:0307:13:03Oc t-20
§
牢记安全之责,善谋安全之策,力务 安全之 实。2020年10月24日 星期六7时13分 3秒Saturday, October 24, 2020
2020/10/24
6
机械原理: 绪 论
§ 1-3 如何进行本课程的学习
➢ 掌握本课程的特点 ➢ 注重理论联系实际 ➢ 逐步建立工程观点 ➢ 认真对待每个教学环节
2020/10/24
7
2020/10/24
14
机械原理题库含答案
课程名称:《机械原理》试题库含答案一、判断题(共216小题)1从运动学的角度看,机构与机器是相同的。
( A )2、试题编号:200511301000710,答案:RetEncryption(A)。
机械是机器和机构的总称。
()3、试题编号:200511301000810,答案:RetEncryption(A)。
各种机构都是用来传递与变换运动和力的可动装置。
()4、试题编号:200511301000910,答案:RetEncryption(A)。
一台机器可能是由一种机构组成,也可能是由若干种机构组成,它们按一定的规律相互协调配合,通过有序的运动和动力的传递与转换来完成预期的功能。
()5、试题编号:200511301001010,答案:RetEncryption(A)。
机构是把一个或多个构件的运动,变换成其他构件所需运动的确定运动构件系统。
()6、试题编号:200511302006510,答案:RetEncryption(B)。
机器中独立运动的刚性单元体,称为零件。
()7、试题编号:200511302006610,答案:RetEncryption(A)。
一个构件可以是不能拆开的单一整体,也可能是由若干不同零件组装起来的刚性体。
()8、试题编号:200511302006710,答案:RetEncryption(B)。
虚约束对运动不起作用,也不能增加构件的刚性。
()9、试题编号:200511302006810,答案:RetEncryption(B)。
若两个构件之间组成两个导路平行的移动副,在计算自由度时应算作两个移动副。
()10、试题编号:200511302006910,答案:RetEncryption(B)。
若两个构件之间组成两个轴线重合的转动副,在计算自由度时应算作两个转动副。
()11、试题编号:200511302007010,答案:RetEncryption(A)。
当机构的自由度F>0,且等于原动件数,则该机构具有确定的相对运动。
机械原理英文版答案
C 1
b a
B 2
C 2
θ
Ψ
m a x D
c
ω
1
A
d
B 1
(e) will any dead-point occur during the whole cycle of the motion? No. (d) find the maximum pressure angle αmax and the minimum transmission angle γmin. γmin =min{γmin′, γmin′′} 不能只求γmin′ !!!
C2 C1 B2 A B1 max
=0°
D
C 1
b a
B 2
C 2 m a x D
Ψ
c
A B 1 F
d
ω
α
V
若DC为原动件,图示两位置的γ不是γmin!!
γ
γ
4-5 In the offset slider-crank mechanism shown in Fig.4-5, the driver crank AB rotates at a constant speed. Let LAB=120mm, LBC=250mm, offset e=60mm, and ϕAB=60o. Find
机械原理习题集(英汉双语)教学张春林第2章答案

第二章机构的结构分析2、综合题2.1 略2.2 a)2.3 a) c)2.4 a) c);b) d)2.5 纯转动:a) b)纯移动:c)2.6 a:桁架,b:闭链,c:闭链,d:闭链e: 闭链, f:开链2.7 a) c)2.8 c)2.9 自由度的数目,原动件;2.10 基本杆组;2.11 b)2.12 a) 2 b) 1 c) 03.工程题3.1 自由度为13.2 自由度为13.3 自由度为13.4 自由度为1,机构简图中有一复合铰链3.5 自由度为1,机构中有一高副(齿轮副)3.6 自由度为1,机构中存在两高副(凸轮,齿轮),一局部自由度3.7自由度为33.8 自由度为13.9 a) 自由度为1,三个高副,两个复合铰链,一个虚约束b) 自由度为1,一个虚约束,一处复合铰链,两个高副3.10 自由度为1:一处局部自由度,两处虚约束,一个复合铰链,两个高副3级机构4、自测题4.1 c)4.2 b)4.4 b)4.5 a)4.6 b)4.7 b)(例:由一对外齿轮组成的齿轮机构)4.8 自由度为1.4.9 自由度为1.4.10 通过电磁铁周期性的通断电,从而吸附或释放板簧上的衔铁,机构在板簧的作用下获得往复运动已达到震动的目的。
4.11 22个自由度。
(指节处为一个自由度,共九个;手指与手掌处的为两个(俯仰,摆动)共十个;拇指合谷穴下面处还有个一个自由度;手腕可以俯仰摆动两个自由度。
)4.12 等效成四杆机构题3.1 题3.2题3.4 题3.4题 3.5 题 3.6题 3.7题 3.10题4-8 题4-9题4-10。
机械原理部分答案
机械原理部分答案 The pony was revised in January 2021<机械原理>第八版西工大教研室编第2章2-1 何谓构件何谓运动副及运动副元素运动副是如何进行分类的答:参考教材5~7页。
2-2 机构运动简图有何用处它能表示出原机构哪些方面的特征答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,而且也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况答:参考教材12~13页。
2-4 何谓最小阻力定律试举出在机械工程中应用最小阻力定律的1、2个实例。
2-5 在计算平面机构的自由度时,应注意哪些事项答:参考教材15~17页。
2-6 在图2-20所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗为什么答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理何谓基本杆组它具有什么特性如何确定基本杆组的级别及机构的级别答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"“高副低代”应满足的条件是什么答:参考教材20~21页。
2-9 任选三个你身边已有的或能观察到的下列常用装置(或其他装置),试画出其机构运动简图,并计算其自由度。
1)折叠桌或折叠椅;2)酒瓶软木塞开盖器;3)衣柜上的弹簧合页;4)可调臂台灯机构;5)剥线钳;6)磁带式录放音机功能键操纵机构;7)洗衣机定时器机构;8)轿车挡风玻璃雨刷机构;9)公共汽车自动开闭门机构;10)挖掘机机械臂机构;…。
2-10 请说出你自己身上腿部的髋关节、膝关节和踝关节分别可视为何种运动副试画出仿腿部机构的机构运动简图,并计算其自由度。
2-11图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮j输入,使轴A连续回转;而固装在轴^上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
机械原理课后习题答案

《机械原理》课后习题答案第2章(P27)2-2 计算下列机构的自由度,如遇有复合铰链、局部自由度、虚约束等加以说明。
(a)n=3,p l=3 F=3*3-2*3=3(b)n=3,p l=3,p h=2 F=3*3-2*3-2=1 (B处有局部自由度)(c)n=7,p l=10 F=3*7-2*10=1(d)n=4,p l=4,p h=2 F=3*4-2*4-2=2 (A处有复合铰链)(e)n=3,p l=4 F=3*3-2*4=1 (A或D处有虚约束)(f)n=3,p l=4 F=3*3-2*4=1 (构件4和转动副E、F引入虚约束)(g)n=3,p l=5 F=(3-1)*3-(2-1)*5=1 (有公共约束)(h)n=9,p l=12,p h=2 F=3*9-2*12-2=1 (M处有复合铰链,C处有局部自由度)2-3 计算下列机构的自由度,拆杆组并确定机构的级别。
(a)n=5,p l=7 F=3*5-2*7=1由于组成该机构的基本杆组的最高级别为Ⅱ级杆组,故此机构为Ⅱ级机构。
(b)n=5,p l=7 F=3*5-2*7=1此机构为Ⅱ级机构。
(c)n=5,p l=7 F=3*5-2*7=1拆分时只须将主动件拆下,其它构件组成一个Ⅲ级杆组,故此机构为Ⅲ级机构。
2-4 验算下列运动链的运动是否确定,并提出具有确定运动的修改方案。
(a)n=3,p l=4,p h=1 F=3*3-2*4-1=0 该运动链不能运动。
修改方案如下图所示:(b)n=4,p l=6 F=3*4-2*6=0 该运动链不能运动。
或修改方案如下图所示:或第3章(P42)3-2 下列机构中,已知机构尺寸,求在图示位置时的所有瞬心。
(a)(b)(c)(a) v3=v P13=ω1P14P13μl3-6 在图示齿轮连杆机构中,三个圆互作纯滚,试利用相对瞬心P13来讨论轮1与轮3的传动比i13。
第5章(P80)5-2 一铰接四杆机构(2)机构的两极限位置如下图:(3)传动角最大和最小位置如下图:∵v p13=ω1P16P13μl=ω3P36P13μl∴i13=ω1/ω3=P36P13 / P16P13(1) ∵a+d=3.5 ,b+c=4∴a+d<b+c又∵最短杆为连架杆∴此机构为曲柄摇杆机构,可以实现连续转动与往复摆动之间的运动变换。
机械制造专业英语--课后答案(部分).(精选)
专业英语翻译一(应力与应变)1 基本概念横截面杆的内应力流体静压力拉伸载荷a在横截面均匀分布任意截面形状拉应力压应力a 正应力通过横截面形心压力均匀分布杆末端应力分布高度应力集中轴向载荷杆件a 拉应变材料拉伸a 压应变两个长度的比值从纯静态以及几何角度考虑1 , , . 研究位移、时间和力运动乘力是科学分析法的一个分支,被称作力学,力学由两大部分组成,静力学和动力学。
2 , a , , . 例如:如果止推轴承上的作用力过大的话,会挤出油膜,引起金属和金属之间的相互接触,轴承将过热而迅速失效。
3 , , , a . 力的直观概念包括力的作用点、大小、方向,这些被称为力的三要素。
4 . , , ., , . 所有的物体既可以是弹性的也可以是塑性的,如果受到力的作用就产生变形。
当变形很小的时候它们被假设成刚体,也就是不产生变形。
5 . . 刚体假设不能应用于内应力和内应变的分析,所以在实际力的分析时,要考虑物体的形变。
6 a , a a .如果作用在质点上所有的力是平衡的,质点将会保持静止或做做匀速直线运动。
21)主要的表现能力2)( )最大单位载荷(应力) 3 ) 应力—应变图4 ) 简单的拉伸试验5) 断裂伸长率6 ) 拉伸试样的两端7 ) 永久变形8 ) 由此产生的载荷位移曲线9 )a 大量产生的物质10 ) 屈服点11) 从弹性到塑性的过度12 ) 材料属性表13 ) 塑性变形14 )a 指定的标准式样长度15) 此刻的破裂16) 短圆柱标本17 ) 韧性材料18 )高应力集中19 ) 极限抗拉强度20 ) 应变硬化区1)A aa . . 拉伸试验包括慢慢加载拉伸载荷直到断裂,拉伸试件两端加粗为了提供装夹区域和避免试件断裂。
2 ) a , ,a . 通常进行试验的方法就是使试件以恒定速度发生变形。
例如,在万能拉伸试验机上,固定端和移动的十字滑块之间的变形是以恒定速度进行的。
3) . FA . 随着实验的进行,用来产生位移的载荷是随位移的变化而变化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
γ
A B
C
m i n
γ
m i n
D
B A
D
(3) If the side link DC is a driver, (a) find the pressure angle α’ and the transmission angle γ’ of the mechanism at that position. C
A D
4-7 In the double-crank linkage ABCD shown in Fig.4-1(b), LAB=80mm, LBC=180mm, LDC=230mm, LAD=200mm. The driver BC rotates at a constant speed. Find the minimum transmission angle γmin of the linkage.
B
a e
A
b
C
(1)the length of stroke H of the slider, (2) the crank acute angle θ (3) the time ratio k , 180° + θ k= 180° − θ
B 1
a
e
ω
A
θ
B 2
b
C 1 H C 2
(4) α and γ at that position, (5) αmax and γmin.
B
D
Can BC LAB L BC L DC LAD Type of Type of Type of rotate 360° linkage DC AB 45 50 60 20 20 35 70 90 20 45 70 90 80 20 45 60 40 30 20 35
B
D
LAB LBC L DC LAD Type of linkage 45 50 60 20 Dou. C 20 35 70 90 Dou. R C-R 20 45 70 90 80 20 45 60 Dou. R 40 30 20 35 C-R
C B A D
α
F
γ
(b) find the angular stroke ψmax of the link DC. (c) find the crank acute angle θ between the two limiting positions. 180° + θ (d) calculate the time ratio k . k = 180° − θ
C B
2 4
3
1
A
D
4-8 According to the data in Problem 4-3, find the range of values for the driving crank AB if the linkage is to be a crank-rocker mechanism and the minimum transmission angle γmin is larger than 50o. Compare the result with that in Problem 4-3(1a).
B ' B
a e
A
b
m a x
α
γ
m i n
γ
C C '
4-3 In a revolute four-bar linkage ABCD, LBC=100mm, LDC =80mm, LAD=110mm. (1)Find the range of the values for the length LAB of link AB if the linkage is either (a) a crank-rocker mechanism with crank AB, or (b) a double-rocker mechanism. (2) Can the linkage C be a double-crank mechanism by B choosing LAB suitably? Why?
C 1
b a
B 2
C 2 m a x D
Ψ
c
A B 1 F
d
ω
α
V
若DC为原动件,图示两位置的γ不是γmin!!
γ
γ
4-5 In the offset slider-crank mechanism shown in Fig.4-5, the driver crank AB rotates at a constant speed. Let LAB=120mm, LBC=250mm, offset e=60mm, and ϕAB=60o. Find
Type of AB Crank Rocker Crank Rocker Rocker
Can BC Type of rotate 360° DC Yes Crank Rocker No No Rocker Rocker Yes Crank No
B
D
4-4 In the revolute four-bar mechanism similar to the one in Fig.4-23(b), let LAB=60mm, LBC =130mm, LDC=140mm, LAD=200mm, and ∠BAD=135o. (1) Determine the type of the revolute four-bar V C mechanism. α F C Crank-Rocker γ
B A D
4-4(2) If the side link AB is a driver and rotates at a constant speed, (a) find the pressure angle α and the transmission angle γ of the mechanism at that V C position.
C 1
b a
B 2
C 2
θ
Ψ
m a x D
c
ω
1
A
d
B 1
(e) will any dead-point occur during the whole cycle of the motion? No. (d) find the maximum pressure angle αmax and the minimum transmission angle γmin. γmin =min{γmin′, γmin′′} 不能只求γmin′ !!!
4-9 The crank-rocker mechanism shown in Fig.4-31 has no quick-return characteristics. Prove that the lengths of links of the linkage satisfy the following equation: (LAB)2 + (LAD)2 =(LBC)2 + (LDC)2
C2 C1 B2 A B1 max
=0°
D
V
B
F
α
Aγ
B
D
(b) will any dead-point occur during the whole cycle of the motion? If so, when? Yes. (c) find the maximum pressure angle αmax and the minimum transmission angle γmin.
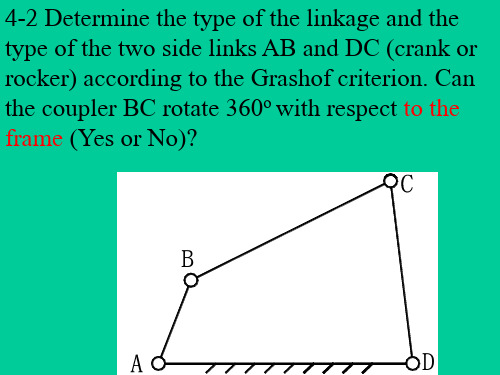
4-2 Determine the type of the linkage and the type of the two side links AB and DC (crank or rocker) according to the Grashof criterion. Can the coupler BC rotate 360o with respect to the frame (Yes or No)?