座椅悬架
车辆磁流变座椅悬架模糊控制的研究
摘
要 :为提 高货车、工程车辆等座椅的减振性能 ,采用磁流变阻尼 器代替座椅 悬架 中的被动 阻尼器,构 建半主动 车辆
座椅悬架系统。针对此 系统建立七 自由度 “ 人体 一座椅 一车辆”动 力学模 型,并 为该 系统设计模糊控制器 ,同时在 随机路面
激励 下对 于该 系统进行仿真分析。仿真结果表明模糊控制能够使 系统较好地抑 制垂直振 动加速度 ,提 高乘坐的舒适性 。 关键词 :半主动座椅悬架 ;磁 流变阻尼 器;模糊控制 ;随机路面激励 ;人 体 一座椅 一车辆模 型 中图分类号 :T 3 18 P 9 . 文献标识码 :A 文章 编号 :10 一 0 X (0 1 1 0 5 o 0 1 O 5 2 1 )0 — 0 1一 5
—
e t s a — v hil d e e cemo l
1 引 言
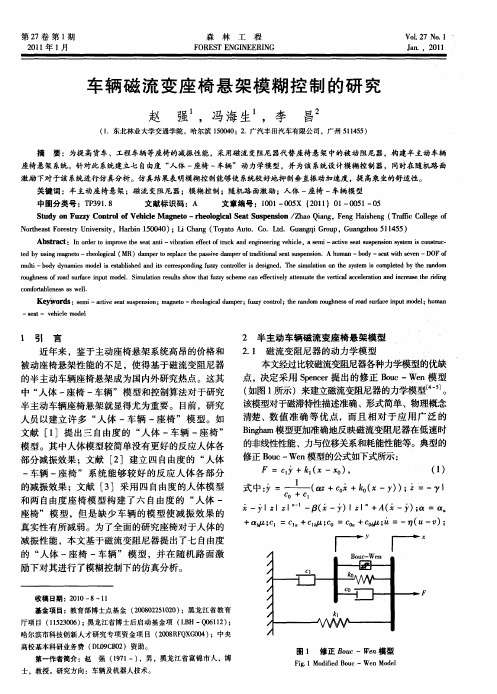
2 半 主动 车辆磁 流变座 椅悬 架模 型
近年来 ,鉴于主动座椅悬架系统高昂的价格和 被动座椅悬架性能的不足 ,使得基于磁流变阻尼器 的半主动车辆座椅悬架成为国内外研究热点。这其 中“ 人体 一 座椅 一 车辆”模型和控制算法对于研究
车辆座椅悬架的研究进展

簧 组成 , 参见 图 3 其无 动 力 源 且 通 常 只能 调 节 阻 ,
车 辆 座 椅 悬 架 的 研 究 进 展
赵 强 丁柏 群 杨 瑞 宋百玲 朱 宝全 ( 东北林业大学交通学院, 哈尔滨 104 ) 500
【 摘要】 座椅悬架是车辆减振系统的 重要组成部分, 文章介绍了被动型、 半主动型、 主动型3 种座椅悬架
的 研 究 进 展 , 后 总 结 了 3种 悬 架 的 优 缺 点 并 分 析 了座 椅 悬 架 的发 展 方 向 。 最
( 控制 ) 性 和阻尼 参数 , 开 人 体最 敏 感频 段 , 或 弹 避
同时尽 量 吸收振 动 能量 J 。无 论 是被 动 、 主动 、 半 主动 型 座椅 悬 架 都 是 按 照 上 述 原 则 设 计 和 控 制 。
本文 按 照被 动型 、 主 动 型 、 动 型 3种 座 椅悬 架 半 主
通过 提 高座 椅 悬 架 的 减 振 性 能 提 高 乘 坐 舒 适 性 , 成本 低 、 于 实 现 、 果 好 , 座 椅 动 态 参 数 的改 易 效 且 变对 车辆 其他 使用 性 能 影 响 很 小 。 因此 研究 座 椅
悬架 减振 对 于 改 善 驾 驶 员 工 作 条 件 、 高 工 作 效 提
被 动 座 椅 悬 架 进 行 优 化 设 计 、 析 、 试 和 评 分 测 价 , 把悬 架 刚 度 设 计 成 非 线 性 弹 性 特 性 以弥
补线 性 特 性 的缺 陷 , 加 适 应 能力 。例 如 高 爱 云 增
等对 非线 性 座 椅 悬 架 的 动 态 参 数 进 行 了优 化 , 他
优 化等 方 面 , 且 以悬 架 弹性 特 性研 究 为 主 。 。 并 已有研 究包 括对 拖 拉机 、 程 机械 、 车 等 车 辆 的 工 货
基于磁流变技术的车辆座椅悬架减振研究

21 0 0年 1 1月
森
林
工
程
Vo . 6 1 2 No 6 .
F ORE | T ENGI NEERI NG
NO ., 201 V 0
基 于 磁 流 变 技 术 的车 辆 座 椅 悬 架 减 振 研 究
赵 强 , 陈云 微
( 北林 大 学 ,哈 尔滨 东 104 ) 5 00
( o h at oet nvr t, ri 10 4 ) N r e s F rs yU ie i Ha n 5 0 0 t r sy b Ab t c :A cr i ec a c r t so m g e relg a ( sr t codn t t h r t i i f a n t h o i l MR)f is a a l d m e a d MR vr bes f a go h a e sc o oc l d r b a p r n a a l tf u vi e i i-
n s lso r tu t a c e on itd b t fte i a allc n c in t tc ul e a p id t n ie rngv h — e s ea tme ,a sr curls h me c sse o ho h m n p rle o ne to ha o d b p le o e gn e i e i
因此 开展大型 机械座椅 减振系统 的研究对 提高施工 效率 、保障人 员安全具 有重要意 义。 目前 座椅悬架 减振包 括被动控 制 、主动控 制和基 于磁流变 技术 的 半主 动 控 制 等 J 。其 中 以 磁 流 变 液 ( geo Mant— rel i l ud )作 为阻尼控 制载体来 实 现阻尼 可 h o g a f is oc l
汽车半主动座椅悬架主要参数优化研究

汽车半主动座椅悬架主要参数优化研究
罗潇逸;高琳琳;姚建红;陈黎光;吴正阳;王威
【期刊名称】《常熟理工学院学报》
【年(卷),期】2024(38)2
【摘要】半主动座椅悬架能有效改善驾驶平顺性,减少人体垂向振动,提升车内驾乘人员的乘坐体验.其中,半主动悬架的初始性能参数对悬架性能起到决定性作用.为此,本文针对半主动座椅悬架的初始性能参数(弹簧刚度和阻尼系数)的优化问题展开研究,在使用了随机路面模型、六自由度半车模型的基础上,以优化前后座椅垂向加速度之比作为适应度函数,利用遗传算法对半主动座椅悬架的刚度及阻尼系数进行优化.最后,利用MATLAB软件对优化结果进行仿真分析.结果表明,经算法优化后,座椅垂向加速度的均方根减少了16.4%,最大值下降了11.3%;座椅相对位移的均方根减少了36%,最大值下降了39.2%.
【总页数】6页(P101-106)
【作者】罗潇逸;高琳琳;姚建红;陈黎光;吴正阳;王威
【作者单位】常熟理工学院汽车工程学院
【正文语种】中文
【中图分类】U461.4
【相关文献】
1.汽车磁流变半主动座椅悬架动态特性的试验研究
2.一种纵向垂向二维振动集成半主动可控座椅悬架系统的试验研究
3.应用磁流变阻尼器的车辆半主动座椅悬架系统性能研究
4.基于磁流变阻尼器高速列车半主动座椅悬架控制方法对比研究
因版权原因,仅展示原文概要,查看原文内容请购买。
半主动车辆座椅悬架系统的控制制与仿真

VhlEger 车辆工程 ei nien c e n i g
整 定方 法是 :初 定 比例 系数 之后 .加 入 积分 环
节 , 整 定 积 分 系 数 。 首 先 在 调 节 初 期 设 置 较 小 的
由 图 3 知 。正 弦 激 励 下 , 在 针 对 座 椅 加 速 度 可
11 P D控 制 原 理 . I
的参 数 ,实现 良好 的控制 效果 。而如何 进行 参数 的
整 定 是PD 制 策 略能 否 达 到预 定 要求 的关 键 。对 I控
在模 拟控 制 系统 中 ,PD控制 是 最 常 用 的控 制 I 方式闼 I 控 制系统 由PD 制器 和被 控对 象组成 , 。PD I控 其控 制 系统原 理如 图 1 示 。 所
于PD 制 器参 数 的调 节 ,可 以参 考 经验 公 式 以及 I控
不 同参 数下仿 真 结果 中最理 想结 果所 用 的参数 来选 定【 3 ] 。本 文 中 的控制 对 象是 模 拟 车辆 垂 直 方 向 的加
速 度 ,属 于 典 型 的偏 差 控 制 负 反 馈 结 构 , 可 以 采 用
1 P I控 制 策 略 分 析 I ) PD控 制 是 最 早 发 展 起 来 的 控 制 策 略 之 一 , 在 I
为座椅 加速 度 ,作 为信 号 ,定值设 置 为0 。 在 Mal /i uik 境 中 .建立 以座 椅 加 速 度 t bSm l a n
为 控 制对 象 的PD控 制 半 主 动 座 椅 系 统 仿 真 模 型 , I
车辆工程 Vh l ni e ei g er cE n目的是 在外 界路 面输 入 随 机改 变等 外扰作 用下 ,减 少振 动 ,保证 车辆 的乘 坐 舒适性 。基于磁 流 变半 主动座 椅悬 架 的减振 性能 不 仅 与磁流 变阻 尼器 自身 的设计 结构 、磁 流变 阻 尼 材 料性 能有 关 ,还与 半 主动悬 架 的控制 策略有 很 大 关 系 ,因此 ,选 取有 效 、便捷 的控 制方 式是 改善 座 椅 减振性 能 的重要 工作 。
车辆座椅悬架模糊控制与仿真

m l z ”
面 激 励 的 变 化 、轮 胎 载 荷 和 行 驶 工 况 要 求 实 时 调 节 控 制 器 的 控 制 力 ,从 而 有 效 地 控 制 座 椅 悬 架 系 统 ,提高 车辆 的乘 坐舒 适性 。
1 = k 2 ( Z 2 一 z 1 ) + C 2 ( 之一 ) 一
度 系数 不可调 ,驾 驶 员长时 间承 受激 烈 振动 。并联
式 主 动 座 椅 悬 架 在 提 高 座 椅 减 振 性 能 方 面 方便 易 行 ,且 座椅 动态 参数 的 改变对 车 辆其 他性 能影 响较 小 。因 此 ,研 究和 改善座 椅悬 架动 态 特性 对于 提 高车 辆 乘坐 舒适 性 有着 重要 的意义 。目前 ,国 内外 学 者 已将 最 优控 制 、P I D控 制 、滑模 变 结 构 控制 、 模糊 控 制和神 经 网络控 制 等理论 应 用于 座椅 悬架 系 统 的振动 控制 ,使 其控 制技 术 E 1 趋 完善 。 本 文 针 对 座 椅 悬 架 系 统 中存 在 时 变 性 和 非 线
图 1 三 自 由度 座 椅 悬 架 模 型
图1 中 ,m】 、m2 、m3 分 别 为 轮 胎 、 车 身 、座 椅 ( 含 人 体 ) 的质 量 ;k 、k 、k 3 分 别为 轮 胎 、车
性 的特 性 ,建 立 了人体 - 座 椅一 车 辆模 型 ,设 计 了模
糊控 制 器 ,并 利 用MAT L AB / S i mu l i n k 对 三 自由度
D o i :1 0 . 3 9 6 9 / J . i s s n . 1 0 0 9 - 0 1 3 4 . 2 0 1 3 . 1 1 ( 下) . 2 1
0 引言
车 辆 座 椅 悬 架 系统 是 一 个 复 杂 的 多 自 由度振 动 系统 ,是 车 辆 减 振 系统 的重 要 组 成 部 分 的 振动 对人 体舒 适 性 影 响最
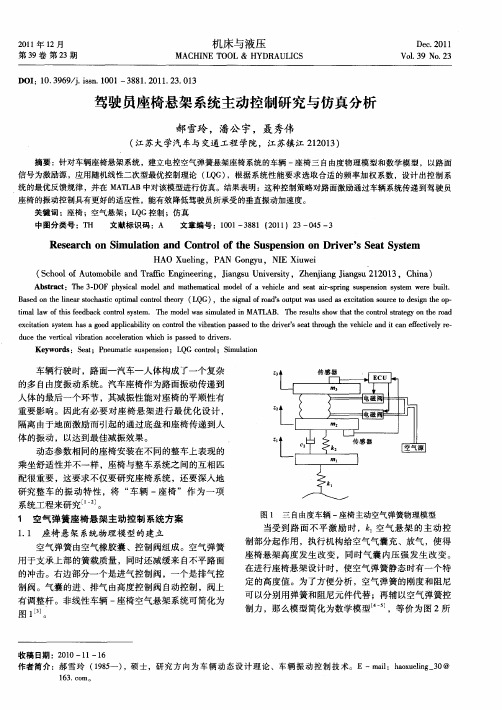
驾驶员座椅悬架系统主动控制研究与仿真分析
HAO e i g, PAN n y Xu ln Go g u, NI u i E Xi we
( co l f uo o i n r f n ier g i guU iesy h n agJ n s 10 3 hn ) Sh o o tm bl adTa cE g e n ,J n s nvr t ,Z ej n i gu2 2 1 ,C ia A e f i n i a i i a
车辆行驶时 ,路面一 汽车一人体构成 了一个复杂
的多 自由度振动系统。汽车座椅作为路面振动传递到
人体 的最后一个环节 ,其减振性能对 座椅 的平顺性有 重要影响 。因此有必要对 座椅悬 架进行最 优化设 计 , 隔离 由于地面激励而引起的通过底盘 和座椅传递到人 体 的振动 ,以达到最佳 减振效果 。 动态参数相同的座椅安装 在不 同的整车上表现 的
乘坐舒适性并不一样 ,座椅与整车系统之 间的互相 匹
配很重要 ,这要求不仅要研究 座椅 系统 ,还要深入地 研究整 车的振 动特性 ,将 “ 车辆 一座 椅 ”作 为一 项 系统工程来研究 。
图 1 三 自由度车辆 一座椅 主动空气弹簧物理模型
1 空气弹 簧座 椅悬 架主动 控制 系统方 案 1 1 座 椅 悬架 系统物理模 型 的建 立 .
驾驶员座椅悬架 系统主动控制研究与仿真分析
车辆磁流变半主动座椅悬架的研制

车辆磁流变半主动座椅悬架的研制寇发荣【摘要】In order to improve the riding comfortability of vehicle driver,a kind of semi-active seat suspension with magneto-rheological damper was developed.The working principle and mechanical model of magneto-rheological damper were analyzed.As a result,the dynamic model of the vehicle semi-active seat suspension was established.The fuzzy control strategies with semi-active seat suspension were designed and the simulation analysis of fuzzy control seat suspension were carried out under the sinusoidal inputs.In addition,the physical prototypes of magneto-rheological damper and test bench system were made.The damping performance tests of the magneto-rheological damper were done.Then,the bench tests of the semi-active seat suspension with magneto-rheological damper were completed.The results show that the test results are closely consistent with the simulation results and the magneto-rheological damper has good controllability.The developed semi-active seat suspension based on magneto-rheological damper obviously reduces the vehicle seat vibration.%为了提高车辆驾驶员的乘坐舒适性,研制了一种基于磁流变减振器的半主动座椅悬架。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
绪论
1.1本文研究的主要内容和研究意义
由于货车、拖拉机、工程机械等车辆的地面激励输入大、悬架性能相对较差,驾驶员长时间承受震动和冲击,易引发职业病、产生疲劳感、诱发操纵失误,进而造成道路交通或施工事故。
虽然改进提盘悬架可以提高减震性能,但是车辆的行驶平顺性、操纵稳定性、乘坐舒适性对地盘悬架参数的要求是相互矛盾的,参数改动余地较小。
尤其是货车等自重和载荷较大,矛盾变得尤为突出。
而通过提高座椅悬架的震动性能提高乘坐舒适性,成本低、易于实现、效果好,而座椅动态参数的改变对车辆其他使用性能影响较小。
因此研究座椅悬架减震对于改善驾驶员工作条件、提高工作效率、保障人员健康和车辆安全具有重要的意义。
车辆座椅的动态舒适性与座椅级人体的振动频率一般在2—4 Hz左右,人体的振动响应分布在低频30Hz以下,4—8Hz是人体对垂直方向振动的最敏感区域,此时的身体各部分容易产生共振。
因此,提高座椅动态舒适性的原则就是合理地选择弹性和阻尼参数,避开人体对敏感频段,同时尽量吸收振动能量。
无论是被动、主动、半主动型座椅悬架都按照上述原则设计和控制。
本文利用机械原理、理论力学和MATLAB运动学仿真的相关知识,对座椅悬架进行结构分析,拆分基本组件,运用MATLAB的Simulink软件包编写各基本构件的函数模块,并在Simulink中建立座椅仿真模型,对座椅悬架进行多体动力学仿真求解。
1.2 Matlab仿真软件的简介
在实际工程应用中,控制系统的结构一般比较复杂,对其进行直接分析非常困难。
随着计算机技术和系统建模仿真软件的发展。
通过软件在计算机上建立控制系统模型并对其进行仿真分析已经成为解决此类问题的新途径,Simulink就是在这种情况下应运而生。
Simulink是The Mathworks公司于1990年推出的产品,
是用于Matlab下建立系统框图和仿真的环境。
从名字上我们可以看出该程序的两层意思:“simu”表示它用于计算机仿真,而“Link”表示它能进行系统连接,即把一系列的功能模块连接起来,构成复杂的系统模型[15]。
Simulink的出现大大提高了控制系统分析和设计的效率,该软件具有仿真和连接两大功能,即首先利用鼠标在模块窗口绘制出所研究的控制系统的模型,然后借助Simulink所提供的功能对系统进一步仿真和分析。
由于Simulink具有一系列优点,使它迅速成为仿真领域的首选计算机环境:
Simulink可以方便地创建和维护一个完整的模块,评估各种算法和结构和验证系统的功能。
(1)用户能够快速、准确地创建动态系统的计算机仿真模型,尤其是对复杂的不确定性的非线性系统,这主要是因为Simulink是使用模块组合的方式建模的。
(2)Simulink模型可以对连续和离散,线性和非线性的动态系统进行模拟,换句话说Simulink几乎可以适用于所有可能遇到的各种形式的动态系统。
(3)Simulink还包含一套处理图形动画的方法,用户可以使用这种方法观察仿真的全过程。
(4)Simulink没有单独应用的语言,可以应用S函数规则。
S函数一般指M 函数文件、Fortran程序、C语言或C++程序,通过特殊的语法使之能够被Simulink 模块和模型调用。
S函数的使用使Simulink的处理能力更强,更加充实与完善。
(5)Simulink允许用户基于方便的原则设定自己特有的模块和模块库,与Matlab一样不是封闭的。
(6)Simulink有比较完整的帮助系统,用户可以随时找到所需的模块说明,使用方便[16]。
综上所述,Simulink是一种开放的,能够模拟各种动态系统的强有力的系统仿真软件。
因此,近年来,无论是在学术界还是在工业应用领域,Simulink都已经成为动态系统建模和仿真领域应用最为广泛的软件。
使用Simulink对控制系统进行仿真分析的一般步骤为:
1)提出所研究的控制系统问题;
2)忽略次要因素,建立系统的动力学模型和动力学方程;
3)确定系统的输入和输出,使用Simulink建立控制系统的仿真模型;
4)在给定的系统参数和输入下对模型进行仿真;
5)运用控制理论对仿真结果进行分析。
目录
第1章绪论
1.1 本文研究的主要内容和研究意义
1.2Matlab仿真软件的简介
第2章路面激励模型
2.1 路面不平度
2.1.1 路面不平度的定义
2.1.2 路面不平度的评价指标
2.2 路面模型
第3章三质量车辆动力学模型
3.1 车辆振动系统的简化
3.2 三质量车辆动力学模型建立
3.3 三质量车辆动力学方程建立
第4章座椅悬架LQR控制
4.1 LQR控制方法介绍
4.2 LQR控制的理论基础
4.3 系统的能控性和能观性
4.4 LQR控制状态方程
4.5 最优控制器设计
4.6 Matlab仿真结果与分析
4.6.1 频域仿真分析
4.6.2 时域仿真分析
第5章结论
参考文献
致谢
附录
附录一外文翻译
附录二Matlab程序。