车辆座椅悬架模糊控制与仿真
基于模糊控制的车辆主动悬架仿真研究

摘 要 : 以 二 自 由 度 车 辆 主 动 悬 架 模 型 为 研 究 对 象 ,基 于 车 辆 动 力 学理 论 , 建 立 主 动 悬 架 系 统 的 动 力 学 方 程 和 路 面 输 入 模 型 方 程 , 并 以 悬 架 动 挠 度 为 控 制 目标 设 计 模 糊 控 制 器 。 在 M a a/ i l k里 建 立 t b Smui l n
二 自由度 主 动 悬 架 系统模 型和 随 机路 面激 励模 型 ,结合 模 糊控 制 器进 行 仿 真 分析 。结果 表 明 ,相 对被 动 悬架 而言采 用 以 悬架动 挠度 为控 制 目标 的模糊 控 制策 略 的主 动 悬架 能有 效地 抑 制 车辆 振 动 .
提 高 车 辆 的 乘 坐舒 适 性 和 安 全 性 关 键 词 : 主 动 悬 架 :模 糊 控 制 :M a a/ i l k t b Smui l n 中 图分 类 号 :T 3 1 P9. 9 文 献 标 识 码 :A d i 03 6 /.s .0 2 6 7 .0 20 . 8 o: . 9 isn10 — 6 32 1 .1 3 1 9 i 0
tv upe so o e n heso hat e e r d m o lwe e etbhhe i a a Sm u n n c mbiai fte fz y c ntol r t ie s s n in m d la d t t c si un v n oa de r sa s d n M d b/ i h k i o c nt on o h u z o r l o e sm uae t ro m a c fa tv use in.Th eu t s w h tt e a t u p n in c n e e t l u p esve il ir t ,a d i i lt hepef r n e o cie s p ns o e r sls ho t a h c ve ss e so a f c vey s p r s h ce vb ai i i on n m- pr v erdngpe om a c n e u i . o et i r r n ea d sc rt h i f y K e r s cies s e so y wo d :a tv u p n in; f z o r l malb/i uik uz c nto ; y t a sm l n
车辆磁流变座椅悬架模糊控制的研究
摘
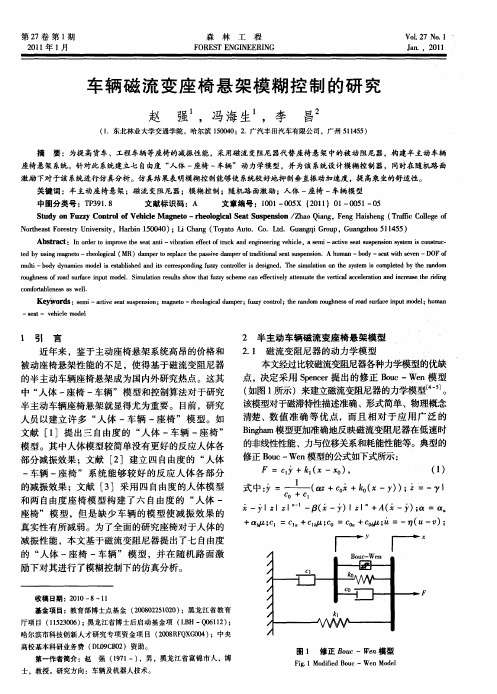
要 :为提 高货车、工程车辆等座椅的减振性能 ,采用磁流变阻尼 器代替座椅 悬架 中的被动 阻尼器,构 建半主动 车辆
座椅悬架系统。针对此 系统建立七 自由度 “ 人体 一座椅 一车辆”动 力学模 型,并 为该 系统设计模糊控制器 ,同时在 随机路面
激励 下对 于该 系统进行仿真分析。仿真结果表明模糊控制能够使 系统较好地抑 制垂直振 动加速度 ,提 高乘坐的舒适性 。 关键词 :半主动座椅悬架 ;磁 流变阻尼 器;模糊控制 ;随机路面激励 ;人 体 一座椅 一车辆模 型 中图分类号 :T 3 18 P 9 . 文献标识码 :A 文章 编号 :10 一 0 X (0 1 1 0 5 o 0 1 O 5 2 1 )0 — 0 1一 5
—
e t s a — v hil d e e cemo l
1 引 言
2 半 主动 车辆磁 流变座 椅悬 架模 型
近年来 ,鉴于主动座椅悬架系统高昂的价格和 被动座椅悬架性能的不足 ,使得基于磁流变阻尼器 的半主动车辆座椅悬架成为国内外研究热点。这其 中“ 人体 一 座椅 一 车辆”模型和控制算法对于研究
车辆主动悬架模糊控制器的设计及其仿真分析
( /) 车身加速度
图! 用拟合出的 "#$ 实现控制 [!] 林辉, 王林 " 迭代学习控制理论 [#] " 西北工业大学出版社, !$$% & !’ " [(] 焦李成 " 神经网络系统理论 [ #] " 西安 电子 科 技 大学 出 版 社, !$$’ & !( "
收稿日期: !""! # "$ # !"
! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! !
第 !" 卷
5 其中: 0 %( $ / ", $ / (, $" , $( , $, )
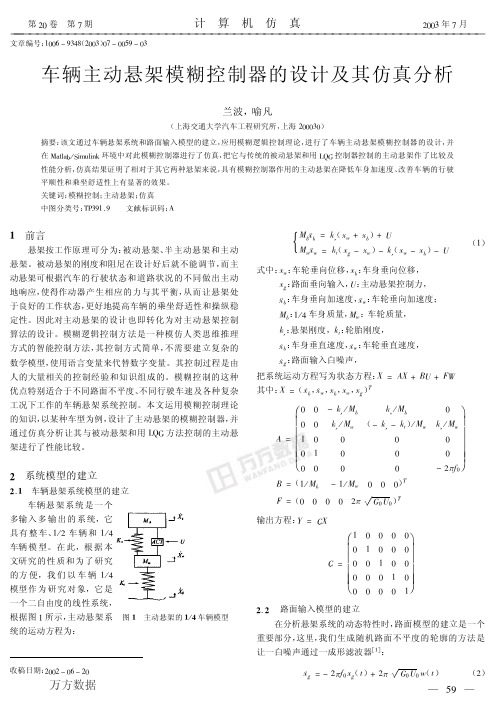
系统模型的建立
车辆悬架系统模型的建立 车辆悬 架 系 统 是 一 个
" " 1 % ’ " "
" " " ’ "
- &’ . !" &’ . !( " " " - ’ . !(
&’ . !" ( - &’ - &+ ) . !( " " "
基于模糊控制的汽车主动悬架系统仿真研究

基于模糊控制的汽车主动悬架系统仿真研究吴慧峰【期刊名称】《计算机仿真》【年(卷),期】2012(29)3【摘要】汽车悬架直接影响汽车在行驶过程中抑制不平路面对车身的冲击力及车身倾斜度,传统被动悬架遇冲击自动调节能力较差,抗振能力不强,针对上述问题,通过对悬架受力特点分析,建立了1/4车体二自由度主动悬架数学模型,结合自动控制理论,设计车辆的主动悬架模糊控制器,利用MATLAB/Simulink模糊工具箱对其进行仿真,在相同输入的情况下,对主动悬架与被动悬架模型部分性能参数分析比较,仿真结果表明采用此模糊控制器的主动悬架在提高车辆乘坐的舒适性和操纵的稳定性方面明显优于被动悬架.实验证明,研究结果对汽车主动悬架系统的设计具有一定参考价值.%Automobile suspension affects the ability of inhibiting the impact of uneven road to body and gradient of body to automobile in the running process, and old suspension has poor ability of automatic adjustment and weak ca pability of antivibration. By analyzing the forcing characteristics of suspension, we built a mathematical model of two -degree of freedom active suspension model of a quarter of vehicle, and designed of fuzzy controller for vehicle active suspension for the above reasons combining the automatic control theory. Using the MATLAB/Simulink fuzzy toolbox, we designed fuzzy controller for the active suspension, and under the same input conditions, analyzed and compared some performance parameters of active suspension model and passive suspension model. Thesimulation result shows that active suspension with fuzzy controller is significantly better than the passive suspension on ride comfort and handling stability. Experiment shows that the study has certain reference value for the practical application of active suspension system.【总页数】4页(P363-366)【作者】吴慧峰【作者单位】桂林航天工业高等专科学校,广西桂林541004【正文语种】中文【中图分类】TP301.6【相关文献】1.汽车液压半主动悬架模糊控制系统仿真研究 [J], 王恩涌;陈翔;钱永生2.基于MATLAB的汽车主动悬架模糊控制系统仿真 [J], 马娇;朱炎;王建锋;李永新3.基于Simulink的液压半主动悬架模糊控制系统仿真 [J], 白月飞;陈翔4.基于模糊控制的汽车主动悬架仿真研究 [J], 张正;高志彬5.基于模糊控制的磁流变减振器半主动悬架系统仿真分析 [J], 姚行艳;胡力月;田雨因版权原因,仅展示原文概要,查看原文内容请购买。
半主动车辆座椅悬架系统的控制制与仿真

VhlEger 车辆工程 ei nien c e n i g
整 定方 法是 :初 定 比例 系数 之后 .加 入 积分 环
节 , 整 定 积 分 系 数 。 首 先 在 调 节 初 期 设 置 较 小 的
由 图 3 知 。正 弦 激 励 下 , 在 针 对 座 椅 加 速 度 可
11 P D控 制 原 理 . I
的参 数 ,实现 良好 的控制 效果 。而如何 进行 参数 的
整 定 是PD 制 策 略能 否 达 到预 定 要求 的关 键 。对 I控
在模 拟控 制 系统 中 ,PD控制 是 最 常 用 的控 制 I 方式闼 I 控 制系统 由PD 制器 和被 控对 象组成 , 。PD I控 其控 制 系统原 理如 图 1 示 。 所
于PD 制 器参 数 的调 节 ,可 以参 考 经验 公 式 以及 I控
不 同参 数下仿 真 结果 中最理 想结 果所 用 的参数 来选 定【 3 ] 。本 文 中 的控制 对 象是 模 拟 车辆 垂 直 方 向 的加
速 度 ,属 于 典 型 的偏 差 控 制 负 反 馈 结 构 , 可 以 采 用
1 P I控 制 策 略 分 析 I ) PD控 制 是 最 早 发 展 起 来 的 控 制 策 略 之 一 , 在 I
为座椅 加速 度 ,作 为信 号 ,定值设 置 为0 。 在 Mal /i uik 境 中 .建立 以座 椅 加 速 度 t bSm l a n
为 控 制对 象 的PD控 制 半 主 动 座 椅 系 统 仿 真 模 型 , I
车辆工程 Vh l ni e ei g er cE n目的是 在外 界路 面输 入 随 机改 变等 外扰作 用下 ,减 少振 动 ,保证 车辆 的乘 坐 舒适性 。基于磁 流 变半 主动座 椅悬 架 的减振 性能 不 仅 与磁流 变阻 尼器 自身 的设计 结构 、磁 流变 阻 尼 材 料性 能有 关 ,还与 半 主动悬 架 的控制 策略有 很 大 关 系 ,因此 ,选 取有 效 、便捷 的控 制方 式是 改善 座 椅 减振性 能 的重要 工作 。
车辆半主动悬架的模糊控制与仿真
车辆半主动悬架的模糊控制与仿真由于现代汽车越来越多地采用独立悬架, 因此对悬架系统的研究大都是针对2自由度1/4汽车模型进行的, 这种分析方法简单且不失研究的重要性。
1 仿真工具简介AMESim是面向工程系统的高级建模仿真软件, 它使您能对任何元件和系统的动态性能进行仿真计算。
友好的用户界面和不断改进的基于工程实践的众多应用库使得软件的使用简单可靠,从而为工程设计提供了快速、准确的解决方案。
它是一个图形化的开发环境, 适合于工程系统的建模, 仿真和动态性能分析。
MATLAB是以复数矩阵作为基本单元的一种程序设计工具,MATLAB中集成了具有动态系统建模、仿真工具的SIMULINK。
SIMULINK是面向传递函数、方框图的动态仿真工具。
SIMULINK仿真具有可视化的编程效果, 能够实时控制参数, 有效地对数据输入输出进行分析。
AMESIM建立模型具有简单、形象的特点, SIMULINK则更偏重于体现其数学模型本身, 逻辑性绞强。
两者利用接口技术, 有机地结合在一起, 使模型建立既直观且不失研究的准确性。
2 车体模型及路面谱此系统模型, 如图1所示。
m2为非簧载质量, m1为簧载质量,k2为悬架弹簧刚度, k1为车轮弹簧刚度, c为阻尼器。
由于现代汽车越来越多的采用独立悬架, 故分别讨论前轮载荷与前轴, 后轮载荷与后轴所构成的两个双质量系统的振动, 即1/4 车体模型,方法简单且可靠。
图1 1/4 车体模型由于仿真需要路面信号输入, 该计算机仿真模型, 这里用两种方法得到路面谱:(1) 当行驶车速稳定时, 在时间域内路面速度的输入为白噪声, 当车速恒定(v=20m/s) 时, 汽车垂直功率谱为一常数, 于是路面轮廓可由白噪声通过一个积分器产生;(2) 整形滤波器得到的随机路面轮廓, 该路面激励由谱分析以及相关知识可得可以消除时间序列中的直流分量和均值漂移成分。
(以A级公路路面谱为例, 由AMESIM可建立随机路面白噪声输入模型和整型滤波器输入模型, 如图2所示。
基于模糊理论的车辆主动悬架控制策略与仿真研究的开题报告

基于模糊理论的车辆主动悬架控制策略与仿真研究的开题报告一、研究背景及意义随着汽车产业的不断发展和人们生活水平的提高,汽车行驶的安全性、舒适性和稳定性等方面的要求也越来越高。
汽车悬架系统是保障车辆行驶安全和舒适的关键部件之一,而车辆主动悬架系统则是改善汽车悬架系统性能的重要途径之一。
车辆主动悬架系统是指通过电子控制技术对悬架系统进行控制,使车辆悬架系统能够根据不同路况和行驶状态调整悬架系统的阻尼、弹性和高度等参数,从而保证车辆行驶的稳定性、舒适性和安全性等。
目前,主动悬架系统已经成为高档车型的标配,而随着技术的不断发展和成本的不断降低,主动悬架系统的应用将会越来越广泛。
在车辆主动悬架系统的设计和控制中,模糊理论是一种非常有效的数学工具。
模糊理论可以很好地解决复杂系统建模和控制问题,尤其是在面对模糊性较高的问题时,模糊理论更是具有独特的优势。
因此,在车辆主动悬架系统的控制研究中,应用模糊理论对悬架控制策略进行建模和优化是非常有必要和有意义的。
二、研究内容和方法本文的研究内容是基于模糊理论的车辆主动悬架控制策略与仿真研究。
主要包括以下几个方面:(1)分析车辆悬架系统的基本工作原理和主动悬架系统的各种控制策略,并对其优缺点进行比较分析。
(2)应用模糊理论对车辆主动悬架系统的控制策略进行建模和优化,选择合适的控制参数和控制策略,提高车辆行驶的稳定性和舒适性。
(3)设计车辆主动悬架系统的控制器,采用实时控制算法对悬架系统进行控制,并对控制器进行仿真验证和实际试验。
(4)通过对模拟仿真和实验结果的分析,评估车辆主动悬架系统的控制效果和性能,为悬架系统的设计和实际应用提供参考。
本文的研究方法主要是理论分析和仿真实验相结合的方法。
在理论分析阶段,主要是通过文献调研和综合分析,确定车辆主动悬架系统的控制策略和模糊控制模型。
在仿真实验阶段,主要是采用MATLAB仿真软件和实验平台对车辆主动悬架系统进行仿真和实验验证。
驾驶员座椅悬架系统主动控制研究与仿真分析
HAO e i g, PAN n y Xu ln Go g u, NI u i E Xi we
( co l f uo o i n r f n ier g i guU iesy h n agJ n s 10 3 hn ) Sh o o tm bl adTa cE g e n ,J n s nvr t ,Z ej n i gu2 2 1 ,C ia A e f i n i a i i a
车辆行驶时 ,路面一 汽车一人体构成 了一个复杂
的多 自由度振动系统。汽车座椅作为路面振动传递到
人体 的最后一个环节 ,其减振性能对 座椅 的平顺性有 重要影响 。因此有必要对 座椅悬 架进行最 优化设 计 , 隔离 由于地面激励而引起的通过底盘 和座椅传递到人 体 的振动 ,以达到最佳 减振效果 。 动态参数相同的座椅安装 在不 同的整车上表现 的
乘坐舒适性并不一样 ,座椅与整车系统之 间的互相 匹
配很重要 ,这要求不仅要研究 座椅 系统 ,还要深入地 研究整 车的振 动特性 ,将 “ 车辆 一座 椅 ”作 为一 项 系统工程来研究 。
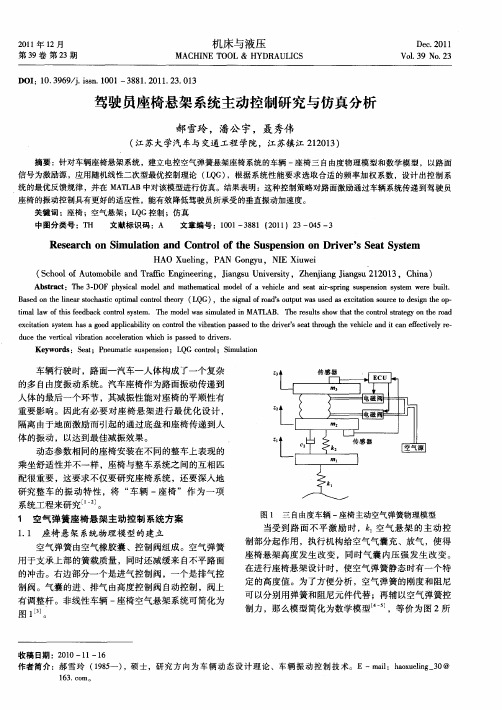
图 1 三 自由度车辆 一座椅 主动空气弹簧物理模型
1 空气弹 簧座 椅悬 架主动 控制 系统方 案 1 1 座 椅 悬架 系统物理模 型 的建 立 .
驾驶员座椅悬架 系统主动控制研究与仿真分析
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
m l z ”
面 激 励 的 变 化 、轮 胎 载 荷 和 行 驶 工 况 要 求 实 时 调 节 控 制 器 的 控 制 力 ,从 而 有 效 地 控 制 座 椅 悬 架 系 统 ,提高 车辆 的乘 坐舒 适性 。
1 = k 2 ( Z 2 一 z 1 ) + C 2 ( 之一 ) 一
度 系数 不可调 ,驾 驶 员长时 间承 受激 烈 振动 。并联
式 主 动 座 椅 悬 架 在 提 高 座 椅 减 振 性 能 方 面 方便 易 行 ,且 座椅 动态 参数 的 改变对 车 辆其 他性 能影 响较 小 。因 此 ,研 究和 改善座 椅悬 架动 态 特性 对于 提 高车 辆 乘坐 舒适 性 有着 重要 的意义 。目前 ,国 内外 学 者 已将 最 优控 制 、P I D控 制 、滑模 变 结 构 控制 、 模糊 控 制和神 经 网络控 制 等理论 应 用于 座椅 悬架 系 统 的振动 控制 ,使 其控 制技 术 E 1 趋 完善 。 本 文 针 对 座 椅 悬 架 系 统 中存 在 时 变 性 和 非 线
图 1 三 自 由度 座 椅 悬 架 模 型
图1 中 ,m】 、m2 、m3 分 别 为 轮 胎 、 车 身 、座 椅 ( 含 人 体 ) 的质 量 ;k 、k 、k 3 分 别为 轮 胎 、车
性 的特 性 ,建 立 了人体 - 座 椅一 车 辆模 型 ,设 计 了模
糊控 制 器 ,并 利 用MAT L AB / S i mu l i n k 对 三 自由度
D o i :1 0 . 3 9 6 9 / J . i s s n . 1 0 0 9 - 0 1 3 4 . 2 0 1 3 . 1 1 ( 下) . 2 1
0 引言
车 辆 座 椅 悬 架 系统 是 一 个 复 杂 的 多 自 由度振 动 系统 ,是 车 辆 减 振 系统 的重 要 组 成 部 分 的 振动 对人 体舒 适 性 影 响最
大 ,本 文 在 此基 础上 提 出 了三 自由度 车 辆 座 椅 悬 架 系 统 简化 模 型 ,选 取 了座 椅 质 心 处 垂 直 振 动 速 度 的误 差及 其 变化 率为 控 制 参 量 ,设 计 了座 椅 模 糊控 制器 。其 座椅 悬架 简化 模型 如 图I N示。
向加 速度 、悬架 动挠 度和轮胎动载 荷等评价指标较 被动控制及P I D 控制方 式有明显改善 , 说 明 该方法 能有 效抑制车辆座椅悬架的振动 。 关键词 : 座椅悬 架 ;模糊控制 ;白噪声 ;仿真
中 图分类号 :T P3 9 1 . 9 文献标识码 :A 文章编号 :1 0 0 9 — 0 1 3 4 ( 2 0 1 3 ) 1 1 ( 下) 一0 0 7 1 - 0 3
1 系统 模型的建立
1 . 1 座椅 悬架 的 动力 学模 型
在 车 辆 减 振 系统 中 ,振 动 最 终通 过 座 椅 传 递
k l ( Z 1 一 Z q ) 艺 2 = ( z 3 一 z  ̄ ) + c 3 ( e 3 一 三 2 ) 一 2
( z 2 一z 1 ) 一 C 2 ( 三 2 一三 1 ) 一“
系 统 模 型 进 行 了仿 真 分 析 。该 控 制 系统 可 根 据 路
身 、座 椅 的等 效 刚度 ;C 、C 3 分 别 为车 身 、 座椅 的
等效 阻 尼 ;u 为控 制 器控 制 力 。z 。 、Z 、Z 2 、Z 3 分 别 为路 面 、轮胎 、车 身和 座椅 质心 处 的垂直 位移 。 根 据 牛 顿 第 二 定 律 建 立 系 统 的 动 力 学 方 程
CHEN Xu e . we n , ZH ANG Ya n . c h e n g , Y ANG We i . y o n g , SHAO P e n g . s h en g
( 辽 宁工业 大学 汽车与 交通 工程 学院,锦 州 1 2 1 0 0 1 ) 摘 要 :为 提 高车辆 座椅 悬架 减振 性 能 ,建 立 了简化 的三 自由 度车 辆座椅 悬 架模 型 ,提出 了座椅 悬 架 模 糊控 制方 法 。该方 法 中将座 椅垂 直振 动 速度误 差 及误 差变化 率作 为模 糊控 制器 的输 入 变 量 ,利用模 糊控 制规则 得到座椅 悬架 的控制 力。 以C 级 路面 白噪声随机 信号为 输入 ,利用 MAT L AB / s I mu ¨ n k 对 模糊控制器进 行了仿真 ,结果 表明 :基于模糊控 制的座椅垂 向速度 、垂
少 司 乘 人 员 所 受 的振 动 u 。重 型 货 车 、农 用 车 和
工 程 车 辆 由于 其 工 作 环 境 和悬 架 性 能 相 对 较 差 ,
使 得 其 在 行 驶 时 产 生 剧 烈 的振 动 。这 些 车 辆 的 驾
驶 员座椅 悬架 大 多采 用被 动悬 架 ,其 阻尼 系数 和 刚
l
甸 似
车辆座椅悬 架模 糊控制与仿真
Resear ch on t he f uz z y cont r oI and si m ul a t i on of car ' s s eat su spensi on
陈学 文 ,张衍 成 ,杨威 勇 ,邵 鹏生
= 一
( 1 )
给 人 体 。文 献 [ 5 ] 通 过 研 究 人 体 对 车 辆 振 动 的 响
收稿 日期:2 0 1 3 - 0 8 -1 4
( z 3 — 2 " 2 ) 一 c 3 ( i 3 一 三 2 ) + U
基 金项 目:辽 宁省教育厅优秀人才项 目 ( L J Q2 0 1 2 0 5 8 ) 作 者简 介:陈学 文 ( 1 9 7 4一),男,副教授 ,博士 ,研 究方向为车 辆系统动力学及控制 。 第3 5 卷 第1 1 期 2 0 1 3 -1 1 ( 下) 【 7 1 】