主动悬架LQG最优控制设计
车辆主动悬架LQG控制器的设计与仿真分析16
的方法是让白噪声通过一成形滤波器[ 1 ] , 所以前、 后 车轮受到的路面激励为 α x 9 = - 2Π f 0 x 9 + 2Π α x 10 = - 2Π f 0 x 10 + 2Π
G 0 v 0w G 0 v 0w
1
在分析悬架系统的动态特性时, 路面模型的建 立是一个重要部分。 这里, 生成随机路面不平度轮廓
Abstract A 1 2 ca r m odel and a road inp u t m odel w ere estab lished ba sed on the op t im a l con t ro l theo ry w h ich w a s u sed to design a LQ G con t ro ller of au tom ob ile act ive su sp en sion. A system sim u la t ion m odel ba sed on M a t lab Sim u link environm en t w a s bu ilt and u sed fo r sim u la t ion. Fou r p erfo rm 2 ance indexes, body accelera t ion, p itch ang le accelera t ion, su sp en sion dynam ic t ravel and t ire dyn 2 am ic deflect ion, w ere com p a red. T he sim u la t ion resu lt s dem on st ra ted tha t the act ive su sp en sion w ith a LQ G con t ro ller cou ld im p rove au tom ob ile rid ing com fo rt p erfo rm ance eno rm ou sly. Key words V eh icle, A ct ive su sp en sion, LQ G con t ro ller, Sim u la t ion
基于遗传算法的汽车主动悬架LQR控制器的优化设计
性 能指标 加权 系数 的 直接 决 定其 所 输 出的 最优 控 制 力及 控制 效果 。但 是加 权 系 数选 择 主 要 由设 计 者 的 经验 确定 , 这样 的 “ 最优” 控 制 实 际上 完 全 依 赖 于 设 计者 的经 验 。如果 选 择 不 当 , 虽 然 可 以求 出 最 优 解 却没 有 实际意 义 , 有 时还 可能 得 出错 误 的结论 。另一 方面 , 所选 择的加权 系 数常 常无 法保 证性 能 指标 的最
O 前 言
悬 架 系统是 汽 车结 构 中 的一 个 起 到举 足 轻 重 的
组 成部 分 , 它具体是 指衔接车轮 ( 车桥 ) 与车身 ( 车 架) 的所 有零 部件 的统 称 , 减 震器 和导 向机 构 以及 弹 簧 是 它 的三个 核 心 组 成 部 分 , 是 增 强 车 辆 平 顺 舒 适
Th e Op t i ma l De s i g n o f Au t o mo b i l e Ac t i v e S u s p e n s i o n wi t h LQR Co n t r o l l e r Ba s e d o n Ge n e t i c Al g o r i t h m
Ab s t r a c t :Ai mi n g a t t h e L QR c o n t r o l l e r o f Au t o mo b i l e a c t i v e s u s p e r s i o n, T h e we i g h t e d ma t r i x wa s o p t i —
为 目标 函数 对加权矩 阵进 行优化 , 提高了L Q R控制 器的设计效率 和性能 。仿真 结果表 明基 于遗 传 算法 设计 的 L Q R控制 器减少 了路 面对 车身的振动 冲击 , 提 高了汽车操 作的稳 定性和 乘 坐的舒适性 。 关键 词 : 主动 悬 架 ; L Q R; 遗 传 算法 ; 目标 函数 ; 仿 真 中图分 类号 : U 4 6 1 . 4 文献 标识 码 : B
基于随机线性最优控制理论的车辆主动悬架控制器的设计研究

D s nrsa c f c v s e s n cnr l rb sdo Q o t l o t l h o y ei ee rho t es p ni o t l ae nL G pi nr e r g a i u o oe ma c ot
Y in— u , u ig e , i a — a g , unY — e g ,D n ig i g i a jn・ S nY n —C j B i y n G a i fn o gJ —xa 。 J n n
(. ca i l n i en eatetfes C i n e o c ne n cnl yS nh i 2 03 ,hn ; 1Meh n a egn r gdp r n at hn u i r fsi c dt hoo ,h g 0 2 7 C i c ei m o a vs e a e g a a a
ie n a p c t n o c v u p n i n c n rls se z d i p H a o fa t e s s so o t y tm. i i e o
K yw rs ates pninss m; Q ( na udacG us ) vhc ya is cr de e od : cv ue s t L G( L er art as a ; e l d n c; a i s o ye i q i i n i e m mo l
易建 军 , 英策 季 白杨 关 懿峰 董金祥 。 孙 , , ,
基于AHP的车辆主动悬架LQG控制器设计
动
与
冲
பைடு நூலகம்击
J OURNAL OF VI B RAT I ON AND S HOCK
基于 A H P的 车辆 主动 悬 架 L Q G 控 制器 设 计
罗鑫源 ,杨世文
( 中北 大学 机 电工程学 院, 太原 0 3 0 0 5 1 )
摘 要 :基于层次分析法( A H P ) 设计了一种能够降低车身加速度( B A ) 、 悬架动行程( S WS ) 和轮胎动位移( D T D )
a n d d y n a m i c t y r e d i s p l a c e m e n t ( D T D) .A 2 - D O F d y n a m i c m o d e l o f a 1 / 4 v e h i c l e p a s s i v e a n d a c t i v e s u s p e n s i o n w a s i f r s t l y
LUO Xi n — y u a n,Y ANG S h i — we n
( C o l l e g e o f M e c h a t r o n i c E n g i n e e r i n g ,N o A h U n i v e r s i t y o f C h i n a , T a i y u a n 0 3 0 0 5 1 ,C h i n a )
的车辆主动悬架线性最优 ( L Q G) 控制器 。首先建立 了 2自由度 1 / 4车辆主被动悬 架动力学 模型 ; 然后 采用 A H P确定 了
悬架各性能评价指标 的加权 系数并利用最 优控制 理论设计 了车辆 主动悬架 控制器 ; 最后 在 Ma t l a b / S i m u l i n k环境下进 行
基于LQR控制的主动悬架优化设计
基于LQR控制的主动悬架优化设计摘要:根据汽车行驶性能的要求,本文以1/4 车辆模型为例,建立汽车的动力学模型,利用线性二次最优控制理论对主动悬架的LQG 控制器进行设计,并运用MATLAB/simulink对汽车动力学模型进行仿真。
结果表明: 具有LQG 控制器的主动悬架对车辆行驶平稳性和乘坐舒适性的改善有良好效果。
关键词:主动悬架;被动悬架;LQG控制器引言悬架系统是汽车的重要部件, 对于汽车的平顺性、操稳性和安全性都有着重要的影响, 而主动悬架是悬架发展的必然方向。
控制器的设计对于主动悬架性能的发挥起着重要的作用, 本文中以1/4 汽车主动悬架为研究对象, 建立汽车动力学模型和设计LQG控制器算法, 应用Matlab/Simulink 进行汽车系统的控制仿真。
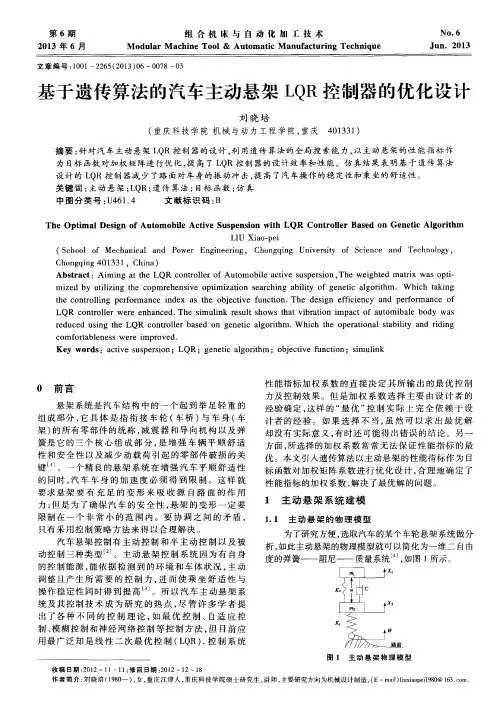
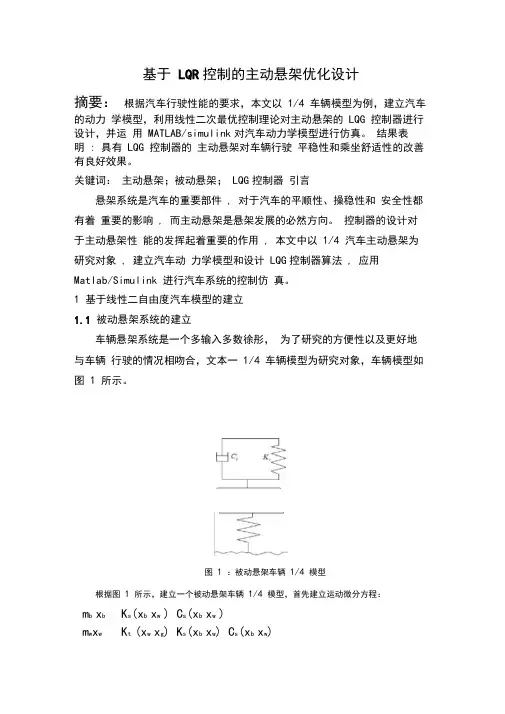
1 基于线性二自由度汽车模型的建立1.1 被动悬架系统的建立车辆悬架系统是一个多输入多数徐彤,为了研究的方便性以及更好地与车辆行驶的情况相吻合,文本一1/4 车辆模型为研究对象,车辆模型如图1 所示。
图1 :被动悬架车辆1/4 模型根据图1 所示,建立一个被动悬架车辆1/4 模型,首先建立运动微分方程:m b x b K s(x b x w ) C s(x b x w )m w x w K t (x w x g) K s(x b x w) C s(x b x w)整理得:xbC sxbsssx w s xb ssxm b m bmbC s K sK s K txbs x b s xb s tx bm w m wmw1)式中: C s 为悬架阻尼, K s 为悬架刚度。
选取状态变量和输入向量为: U x g则可将系统运动方程及路面激励写成状态空间矩阵形式,即:X AX BUC sC sK sK sm bmb mb mbK tCs C sK sK s K sABmwmwmwmw mw1 0 0 01x w x gx b x w ]T将性能指标项写为状态变量以及输入信号的线性组合形式,即:Y CX DU其中:Cs Cs Ks Ks0 mbmbmbmbD1 C00 0 1111.2 被动悬架系统的建立mbC s其中, A 为状态矩阵, B 为输入矩阵,其值如下:将车身加速度、轮胎动变形、悬架动行程作为性能指标,即:根据图 2 所示,建立一个主动悬架车辆 1/4 模型,首先建立运动微分方程:m w x w K s (x b x w ) K t (x g x w ) U g m b x b K s ( x b x w ) U g1.3 路面模型的建立文利用白噪声信号为路面输入激励,x g (t) 2 f 0x g (t) 2 G 0U 0 w(t)其中, f 0 为下截止频率, Hz ;G 0 为路面不平度系数, m 3/cycle ;U 0 为前进车 速, m/sec ;w 为均值为零的随机输入单位白噪声。
车辆主动悬架最优控制
图 1. q1=3.35E5 ,q2 =40.5E5 的幅频特性图 由图 1 可以看出主动悬架的车身加速度、悬架动扰度、轮胎动载荷幅频特性图同被动悬架相 似,同样具有双峰,不同的是在低频固有频率附近,主动悬架的响应幅值明显减小,且变化 平缓, 主动悬架的减振性能较为突出; 在高频固有频率附近, 主动悬架的响应幅值变化较大 。 可知取该组权系数时,主动悬架的减振性能的改善程度不够理想; 2) 取 q1=3.35E8,q2 =40.5E8 时,由程序得 k1 =63640;k2=4863;k3 =-36146;k4 =-904;及 系统的传递函数和幅频特性,绘制幅频特性图 %主动悬架 q1=3.35e8;q2=40.5e8 时的仿真程序: m1=36;m2=240;kt=160000;q1=3.35e8;q2=40.5e8; A=[0 1 0 -1;0 0 0 0;0 0 0 -1;0 0 kt/m1 0]; B=[0;1/m2;0;-1/m1];D=[0;0;1;0]; C=[0 0 0 0;1 0 0 0;0 0 1 0]; E=[1/m2;0;0];H=[0;0;0]; Q=[q2 0 0 0;0 0 0 0;0 0 q1 0;0 0 0 0];R=[1]; [K,P,F]=lqr(A,B,Q,R) M=A-B*K; N=C-E*K; G=ss(M,D,N,H); G1=tf(G) i=1; for s=0:0.1:80 s=s*2*pi*j; G11=(150.6*s^3 + 1.673e004*s^2 + 1.179e006*s + 1.653e-008)/(s^4 + 45.36*s^3 + 5473*s^2 + 9.005e004*s + 1.179e006);
LQG控制方法
1.主动悬架控制模型的建立车辆悬架系统是一个多输入多输出的系统。
它具有整车、1/2车辆和1/4车辆模型。
根据本文研究的性质和为了研究的方便,以车辆1/4模型作为研究对象(图1),它是一个二自由度的线性系统。
根据图1所示,主动悬架系统的运动方程为式中:M b为1/4车身质量;M w为车轮质量;U为控制器产生的作用力;K t为轮胎刚度;x0为路面的扰动输入;x1为车轮垂直位移量;x。
2为车身垂直加速度。
其状态方程与输出方程可写成如下形式:取状态变量X=(x2-x1,x。
2,x0—x1,x。
1)T作为状态变量,把系统运动方程写为矩阵形式:选取Y=[x。
2,x2-x1,x0—x1,k t(x0—x1)]T为输出变量。
这样主要考虑研究车辆平顺性时比较方便,故选取车身垂直加速度x。
2、悬架的动扰度x2-x1、车轮的跳动量x0—x1和车轮动载荷k t(x0—x1)为输出变量。
故得输出矩阵根据现代控制理论,对系统方程寻求控制U使二次型目标函数取最小值的问题就是二次型最优控制问题。
在悬架的设计中,必须综合考虑轮胎的接地性、车身的加速度及悬架的动挠度。
线性二次型最优控制可以借助加权系数,对各种性能指标进行综合考虑,取,为LQG控制器的性能指标。
在此三项的平方和中,以车身加速度x。
2为基准,系数取1,q1,q2的值是相对x。
2来说的,分别是轮胎动位移和悬架动挠度的加权系数。
根据最优控制理论,式(5)写成标准二次型的形式式中:Q为状态变量的加权矩阵,R为控制变量的加权矩阵。
其中这里,q l和q2为加权系数。
矩阵Q的大小与轮胎动位移加权系数q1和悬架动挠度加权系数q2有关,q l和q2取不同的值就意味着对不同的分量加不同的加权系数。
当某个分量要特别约束时,我们就可以增大此分量的权系数,若此分量对所要研究的问题影响无足轻重时,则可以设它的加权系数为零。
因此,正确选取加权矩阵的值是十分重要的,不同的加权系数对系统的特性具有不同的影响。
车辆主动悬架LQG控制器的设计与仿真分析(1)
W
BN5"FC5
W
W
W
W
W
W
W
W A#c@W W
eW
W
W
W
W
W
W
W
W A#c@Wg
h i W !"F4 W AL"IJ W A!"FC@ W W W W a
]6 W !"F4 W 8"IJ W W W A!"FC5 W W
l dW W W W W W W W #c jWkW
_6
eW W W W W W W W
/ 主动悬架系统和控制系统的建立
/0/ 悬架系统的建立 车 辆 悬 架 系 统 是 一 个 多 输 入 多 输 出 系 统-为 了
研究的方便以及更好地与车辆行驶的情况相吻合本文 以具 有 #自 由 度 的 $,!车 辆 模 型 为 研 究 对 象车辆模型如图 $所示=
前轴悬挂质量垂向位移
‘w12‘3]!7:45‘3]4
小)即可以取 @&,@(3@F,@K3@L,@M)在性能指标中以 ABC!和 ABCE为基准)即取 @&3@(均为 &.由最优控制理论)
把 式 GLJR GQJ写 成 标 准 二 次 型 形 式 )即 整 理 成
> 4,
89:
;< =
& ;
;
GTUVTD WUXWD (TUYWJO+
"
得
^ @FD@K " IZ@FD[@K "
W
W fa
l #c jWkWg
输 出 矩 阵 为 m6n[7o^X取 矩 阵 n为 !Wp !W的 单 的方法是让白噪声通过一成形滤波器h!iX所以前S后
汽车主动悬架与电动助力转向的集成最优控制
线 性 因素 。电动 助力 转 向系统 及整 车转 向分别 图} 1 、2 _ _ 1 如 0 L
所示。
一
~
~
_
_
一
1●● 』
L
,
了大 量 研究 , 旨在 提 高 车行 驶 的平 顺 性 ,文献[ 1 , 2 ] 就 汽 车 主动 悬 架 振 动进 行 控 制 ,同时 考 虑 发 动机 等 的影 响 , 减小 车 身 的振动 。文献[ 3 ~ 5 ] 以助 力转 向 为研 究 对象 , 在 车 辆转 弯过 程 中单 独 对转 向系统 进行 控 制 。汽 车在 转弯 过 程 中悬 架与 电动 助 力转 向之 间 相互 影 响 ,因此 建立 一 个 悬架 与转 向的综 合模 型 十分 必 要 。本 文把 主动 悬架 模 型
Ke y wo r ds :a c t i v e s us p e n s i on; e l e c t r i c a l p owe r s t e e r i n g; i nt e g r a t e d op t i ma l c o n t r o l
0 引言
摘
要 :建 立 整车 悬 架与 电动 助 力转 向 集成 动 力 学模 型 ,并设 计 L QO 最优 控 制 器。通 过在 Ma d a b / S i mu l i n k 环境 下进 行 仿真 运 算 ,其 结果 表 明 ,采 用所 提 出的控 制 策略 ,不仅 使 汽 车的侧 倾 角速 度 、悬 架动 挠 度 和轮 胎动 位移 有 所改善 ,而且使 车辆 的行 驶 平顺 性 、操 纵 稳定 性有 所提 高。
图 1 电 动 助 力 转 问 系
车辆悬挂LQR主动控制权矩阵权重参数优化
!!摘!要 针对 +G(主动控制算法权矩阵 !和 "的取值困难的问题为降低权矩阵取值复杂度分别设计权矩阵 !
和 "的权重参数 !和 " 建立优化目标函数 !并分析了 !和 "对 !的影响 利用遗传算法 HIJIKCF*7L6MCKDA H* 的快 速搜索能力通过降维寻优得到目标函数最优解 对 H*@+G(的振动控制性能分析结果表明H*@+G(对乘坐舒适性和 操纵稳定性的改善比 +G(明显目标函数 !的值更小 该 +G(权矩阵权重参数优化方法简单有效适用于车辆工程 领域
第 $$ 期!!!!!!!!!!!!!!张进秋等! 车辆悬挂 +G(主动控制权矩阵权重参数优化
基金项目 军队科研计划项目 收稿日期 $9:# <9= <9>!修改稿收到日期$9:# <9> <:$ 第一作者 张进秋 男教授博士生导师:>=" 年生 通信作者 彭虎 男博士生:>;> 年生
?@ABC7$$$99#DE:$=8F6A
用试凑的方法来确定权矩阵的值; 该方法的局限性 在于效率较低且难以得到较优的解
遗传算法 HIJIKCF*7L6MCKDA H* 是一类模拟自 然界优化 进 化 和 繁 殖 过 程 的 自 适 应 全 局 概 率 搜 索 方 法> 具备较好的收敛性能在满足要求的计算精度 时具有计算时间短且鲁棒性好等优点:9 <::
本文针对 +G(主动控制算法权矩阵取值困难的问 题为降低权矩阵设计复杂度设计权矩阵 !和 "的权 重参数利用 H*的快速搜索寻优能力将原有 N 参数 寻优转变成对权矩阵权重参数的寻优并将得到的最 优解与初始 +G(参数在仿真条件下进行对比验证设 计的权矩阵权重参数优化方法的有效性
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
主动悬架LQG最优控制设计吕福麟113085234379摘要:根据汽车行驶性能的要求,建立二自由度的1/4汽车动力学模型,利用最优控制理论对主动悬架的LQG(Linear Quadratic Gaussian)控制器进行设计,运用MATLAB/simulink对模型仿真,对比主动悬架与被动悬架在控制效果上的差别。
仿真结果表明,具有LQG控制器的主动悬架可以明显的提高汽车行驶的操稳性能。
关键词:主动悬架;LQG控制器;MATLAB/simulink;仿真结果ABSTRACT:According to the requirement of the vehicle driving performance,a 2-degree-of-freedoms 1/4 car dynamic model was build.LQG(Linear Quadratic Gaussian) controller for active suspension was designed with the optimal control law,MATLAB/simulink was used to simulation the model,compared the difference of control performance with active suspension and passive suspension.The result of simulation show that it could improve the car driving handling and stability with LQG controller.Key Words:active suspension,LQG controller,MATLAB/simulink,simulation result1前言传统的悬架主要由弹性元件、减震器和导向装置组成,他们的阻尼和刚度已经确定就不便于调节,而且只能在特定的路面激励和特定的车速下才能达到最优控制,灵活性较差。
不能满足人们对驾驶舒适性和操纵稳定性的要求。
为了解决这个问题,主动悬架控制渐渐得到发展,他与被动悬架的主要区别在于可以根据不同路面激励和行驶状况,自行调节车辆的动态,从而满足人们对行驶的要求。
本问就是在此基础之上研究主动悬架的最优控制。
2 2自由度1/4车辆模型的建立图1单轮车辆模型图中m b 为车身质量;m w 为车轮质量;x b 为车身位移;x w 为车轮位移;x g 为路面输入;K s 为悬架刚度;K t 为轮胎刚度;U 为主控制力。
对于图1建立1/4车辆运动微分方程:U x x K x m w b s b b +--=∙∙)(U x x K x x K x m w g t w b s w w --+-=∙∙)()(2.1路面模型的建立在分析主动悬架控制过程时,路面输入是一个不可忽略的重要因素,本文利用白噪声信号为路面输入激励,)(2)(2)(000t w U G t x f t x g g ππ+-=∙其中,0f 为下截止频率,Hz ;G 0为路面不平度系数,m 3/cycle ;U 0为前进车速,m/sec ;w 为均值为零的随机输入单位白噪声。
上式表明,路面位移可以表示为一随机滤波白噪声信号。
这种表示方式来源于试验所测得的路面不平度功率谱密度(PSD )曲线的形状。
我们可以将路面输入以状态方程的形式加到模型中:⎪⎩⎪⎨⎧=+=∙XC Y WF X A X road road road road road 1,2,2,000==-==road road road g road C UG B f A x X ππ;考虑路面为普通路面,路面不平系数G 0=5e-6m 3/cycle ;车速U 0=20m/s ;建模中,路面随机白噪声可以用随机数产生(Random Number )或者有限带宽白噪声(Band-Limited White Noise )来生成。
本文选择有限带宽白噪声为路面输入激励,运用MATLAB/simulink 建立仿真模型如下:图2 路面模型仿真构造出的随机路面轮廓如下图所示:图3 路面输入仿真结果2.2 LQG 控制器的设计在汽车悬架设计中,选取的状态变量为:T w b w b x x x x X ],,,[∙∙=则可以根据车辆动力学方程将这些变量写成状态方程空间矩阵的形式:FW AX X +=∙其中A 为状态矩阵;F 为输入矩阵,其值如下:⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡---=0010010000w s t w s bs b sm K K m K m K m K A⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=000w t m K F主要的性能指标有:车身垂直加速度∙∙b x ;轮胎动变形)(g w x x -;悬架动行程)(w b x x -;即:⎪⎪⎩⎪⎪⎨⎧--∙∙w b g w b x x SWS x x DTD x BA ::: 将这三个性能指标写成矩阵形式:T w b g w b x x x x x Y )](),(,[--=∙∙输出矩阵:⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡--=1100100000b s b s M k M k C 转移矩阵:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=010D由此建立1/4车辆被动悬架动力学模型:图4 1/4车辆被动悬架动力学模型2.3性能指标的确定LQG 控制设计中的目标性能指数J 即车身加速度、悬架动行程和位移的加权平方和的积分值,表示如下:dt x q x x q x x q TJ T b w b g w T ⎰∙∙∞→+-+-=0232221])()([1lim为了据此求解状态反馈增益,必须用状态变量以及输入变量来表示上式:dt NU X RU U QX X TJ T TT T T ⎰++=∞→0]21lim其中 Q :对应于状态变量的权重矩阵;R :约束输入信号大小的权重矩阵; N :耦合项。
对于q 1,q 2,q 3表达的性能函数,可以整理为:dt x q x x q x x q TJ T b w b g w T ⎰∙∙∞→+-+-=0232221])()([1limdt x x x x x Q x x x x x Tw b g w b T w b gw b T ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=∙∙∙∙∞→⎰00][1lim其中⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=213000000q q q Q由于DU CX Y +=所以Q D U U D Q C X U D Q D U X C Q C X DU CX Q DU CX Y Q Y T T N TT R T T Q T T T T 000000)()(+++=++=式中q 1,q 2,q 3分别为轮胎位移,悬架动行程,车身垂直加速度的加权系数。
因此可以求出Q 、R 、N :⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡--++----+==11122212222222220000000000000000q q q m K q q m K q m K q m K q C Q C Q bSbSbSbST; b Tm D Q D R 10==;⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-=0000s s T K K D Q C N ; 利用MATLAB 函数LQR 来计算状态反馈K :),,,,(][N R Q B A lqr E SK=其中,K 为最优状态反馈矩阵;S 为Riccati 方程解;E 为系统特征值。
因此可以得到主动控制力U=-KX 。
)(54321g w b w b x k x k x k x k x k U ++++-=∙∙加权系数的选取决定悬架的性能,如果车身垂直加速度加权系数较大,则可以提高乘坐的舒适性;若轮胎动位移的加权系数较大,则车辆的操纵稳定性较好。
3 仿真分析根据ISO 标准,设定汽车动力学参数为:车身重量kg m b 320=;轮胎重量kg m w 40=;悬架弹簧刚度m N K s /1024⨯=;轮胎等效刚度s t K K 10=;悬架等效阻尼m Ns C s /1000=;路面不平度系数cycle m e G /6530-=;前进速度h km U /200=;下截止频率1.00=f ;所选加权系数05.0,1000,100321===q q q 。
求的得反馈增益矩阵]8502.25846.05255.20641.04946.0[--=K 。
用simulink 建立的主被动悬架的模型如下:图5 1/4车辆主被动悬架动力学模型仿真结果下图所示:图6 车身加速度对比图7 轮胎动行程对比图8 悬架行程对比图9 主动悬架与被动悬架的幅频对比4总结本文首先建立了二自由度1/4车体模型。
并运用线性二次最优化理论设计了车辆主动悬架的LQG控制器。
借助MATLAB/Simulink软件进行仿真分析。
分析结果表明,所设计的最优主动悬架显著地降低了车身的垂向振动加速度。
与被动悬架相比,采用LQG控制器的悬架动行程和车轮动位移也都得到了良好的改善。
所以基于线性二次最优控制理论进行的主动悬架LQG控制器的设计是行之有效的。