FANUC伺服电机选型计算
伺服电机和丝杆选型计算
伺服电机和丝杆选型计算1.伺服电机选型计算:伺服电机是一种将电能转化为机械能的装置,它通过电机驱动系统的精确控制,实现对机械位置、转速和力矩的精确控制。
在选型时,需要考虑以下几个方面:1.1额定输出功率:根据机械系统的工作要求和负载要求,确定伺服电机的额定输出功率。
通常,额定输出功率应略大于所需的最大功率。
1.2额定转速:根据工作要求和负载要求,确定伺服电机的额定转速。
通常,额定转速应略大于所需的最大转速。
1.3额定转矩:根据负载的特性和工作要求,确定伺服电机的额定转矩。
通常,额定转矩应略大于所需的最大转矩。
1.4动态响应速度:根据控制系统的要求,确定伺服电机的动态响应速度。
通常,要求动态响应速度能够满足系统的响应时间要求。
1.5额定电压:根据工作环境和电源供应的要求,确定伺服电机的额定电压。
通常,额定电压应与电源供应的电压相匹配。
2.丝杆选型计算:丝杆是一种将旋转运动转化为直线运动的装置,它通常由丝杆和螺母组成。
在选型时,需要考虑以下几个方面:2.1螺距:根据工作要求,确定丝杆的螺距。
螺距是丝杆每转一周所移动的距离,通常用毫米/转表示。
2.2进给速度:根据机械系统的工作要求,确定丝杆的进给速度。
进给速度是丝杆上点的线速度,通常用毫米/秒表示。
2.3进给力:根据工作负载和系统要求,确定丝杆的进给力。
进给力是丝杆在工作过程中所受的力,通常用牛顿表示。
2.4精度等级:根据工作要求,确定丝杆的精度等级。
精度等级决定了丝杆的运动精度,通常用C级、T级等表示。
2.5长度:根据机械系统的工作空间和要求,确定丝杆的长度。
丝杆的长度应能够满足系统的工作范围要求。
伺服电机选型通用计算公式

9预选伺服电机的确认
所需要加速转矩确认 TP=2Л nM(JM+JL)/60ta +TL 所需要减速转矩确认 TS=2Л nM(JM+JL)/60td -TL 转矩有效值确认 Trms2=(TP2ta+TL2tc+Ts2td)/t 0.486054898 计算值 1.236262156 0.369312404
1 机器规格
序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 名称 负载速度 直线运动部分重量 滚珠丝杠长度 滚珠丝杠直径 滚珠丝杠导程 滚珠丝杠密度 减速比 直线运动外部力 齿轮+联轴器 转动惯量 摩擦系数 综合机械效率 加速时间 减速时间 运行时间 周期时间 符号 VL m LB dB PB ρ R F JG μ η ta tb tc t 数值 15 250 1 0.02 0.01 7870 2 0 0.00004 0.2 0.9 0.1 0.1 1 1.5 单位 m/min kg m m m kg/m3 N kg・㎡ s s s s 2s最大定位完成45mm
5、11、21、33
`2速度线图
加速时间 减速时间 运行时间 周期时间 负载轴转速 电机轴速度计算值 电机轴速度选择 TL=(9.8μ m+F)*PB/(2Л Rη ) 负载转矩计算值 ta tb tc t 0.1 0.1 1 1.5 s s s s min-1 min-1 min-2 N.m 0.433474876
`6负载行走功率 `7负加速功率 8伺服电机预选
计算值 0.433474876 362.255569 3000 0.000229365 200 3000 0.637 2.23 0.0000263 0.000394 最大值 2.23 最大值 2.23 额定转矩 0.637 额定输出 额定转速 额定转矩 、最大转矩 电机转子转动惯量 容许负载转动惯量
伺服电机的选型计算办法

伺服电机的选型计算办法一、确定负载惯量:负载惯量是指伺服电机需要驱动的负载系统的惯性矩阵。
负载的形状、质量、分布和转动部件的位置等都会影响到负载的惯性矩阵。
1.如果负载是刚体,惯性矩阵可以通过测量负载的质量和尺寸,并进行计算得到。
2.如果负载是连续变形的物体,可以通过将其分为多个刚体部分,分别计算惯性矩阵,再进行合成得到整个负载的惯性矩阵。
二、计算定格转矩和定格转速:1.根据应用的工作周期,计算出所需的平均定格转矩。
定格转矩是指电机在长时间运行情况下,能够稳定输出的转矩。
2.根据应用的工作周期和速度要求,计算出所需的平均定格转速。
定格转速是指电机能够稳定运行的最大转速。
三、选择电机型号:1.根据定格转矩和定格转速的要求,查找电机制造商提供的电机规格表,找到满足要求的电机型号。
2.选择电机型号时还需要考虑其他因素,如电机的功率、最大转矩、过载能力、加速度能力等。
根据具体应用的需求进行综合考虑,选取合适的电机型号。
四、校核选型:1.根据选择的电机型号,计算电机的部分负载转矩和转矩脉冲响应时间。
与应用要求进行比较,确保选型的合理性。
2.根据负载惯量和转矩要求,计算伺服电机的加速时间。
与应用的加速要求进行比较,确保选型的合理性。
3.根据电机的定格转矩和转速,计算电机的输出功率。
与应用的功率需求进行比较,确保选型的合理性。
五、其他因素考虑:除了上述的基本选型计算办法外,还需考虑其他因素,例如电机的可靠性、寿命、环境适应性、维护和保养成本等。
总结:伺服电机的选型计算是一个综合考虑电机的转矩、转速、功率和其他性能指标的过程。
根据负载的惯性矩阵、应用的工作周期和速度要求,选择合适的电机型号,并进行校核以确保选型的合理性。
同时,还需要考虑其他因素,如电机的可靠性、寿命和维护成本等。
以上是伺服电机选型计算的一般步骤,具体要根据具体的应用需求来选择,需要结合实际情况进行综合决策。
伺服电机选型计算公式

伺服电机选型计算公式伺服电机选择的时候,首先一个要考虑的就是功率的选择。
一般应注意以下两点:1。
如果电机功率选得过小.就会出现“小马拉大车”现象,造成电机长期过载,使其绝缘因发热而损坏,甚至电机被烧毁。
2。
如果电机功率选得过大.就会出现“大马拉小车”现象,其输出机械功率不能得到充分利用,功率因数和效率都不高,不但对用户和电网不利。
而且还会造成电能浪费。
也就是说,电机功率既不能太大,也不能太小,要正确选择电机的功率,必须经过以下计算或比较:P=F*V/100(其中P是计算功率,单位是KW,F是所需拉力,单位是N,V是工作机线速度m/s)此外.最常用的是采用类比法来选择电机的功率。
所谓类比法,就是与类似生产机械所用电机的功率进行对比。
具体做法是:了解本单位或附近其他单位的类似生产机械使用多大功率的电机,然后选用相近功率的电机进行试车。
试车的目的是验证所选电机与生产机械是否匹配。
验证的方法是:使电机带动生产机械运转,用钳形电流表测量电机的工作电流,将测得的电流与该电机铭牌上标出的额定电流进行对比。
如果电功机的实际工作电流与铭脾上标出的额定电流上下相差不大,则表明所选电机的功率合适。
如果电机的实际工作电流比铭牌上标出的额定电流低70%左右.则表明电机的功率选得过大,应调换功率较小的电机。
如果测得的电机工作电流比铭牌上标出的额定电流大40%以上.则表明电机的功率选得过小,应调换功率较大的电机。
实际上应该是考虑扭矩(转矩),电机功率和转矩计算公式。
即T = 9550P/n式中:P —功率,kW;n —电机的额定转速,r/min;T —转矩,Nm。
电机的输出转矩一定要大于工作机械所需要的转矩,一般需要一个安全系数。
机械功率公式:P=T*N/97500P:功率单位W;T:转矩,单位克/cm;N:转速,单位r/min。
FANUC伺服电机的选择
计算力矩时,要注意以下几点: 。考虑由镶条锁紧力(fg)引起的摩擦力矩
根据运动部件的重量和摩擦系数计算的力矩通常相当小。镶条 锁紧力和滑动表面的质量对力矩有很大影响。 。滚珠丝杠的轴承和螺母的预加负荷,丝杠的预应力及其它一些因 素有可能使得滚动接触的 Fc 相当大。小型和轻型机床其摩擦力矩 会大大影响电机的承受的力矩。 。考虑由切削力引起的滑动表面摩擦力(Fcf)的增加。切削力和驱 动力通常并不作用在一个公共点上如下图所示。当切削力很大时, 造成的力矩会增加滑动表面的负载。 当计算切削时的力矩时要考虑由负载引起的摩擦力矩。
1.3 计算力矩的均方根值
计算快速定位频率
绘制快速定位一个周期的速度-时间和转矩-时间图,如下 图。普通切削时,快速定位的频率不会有问题;但是,对于 有些频繁快速定位的机床必须检查加/减速电流是否会引起 电机过热。
根据力矩-时间图可以得到一个运行周期的加于电机上力矩 的均方根值。对该值进行核算,确保要小于或等于电机的额 定力矩(条件 3)。
7
α电机的选择
计算在一个负载变化的 工作周期内的转矩 Trms
若负载(切削负载,加/减速度)变化频繁,其力矩-时间图 如下图所示。用该图计算出力矩的均方根值后进行核算,和 上述一样,使其小于或等于电机的额定力矩。
FANUC伺服计算

2.1 负载/ 电机惯量比正确设定惯量比参数是充分发挥机械及伺服系统最佳效能的前提,此点在要求高速高精度的系统上表现尤为突出,伺服系统参数的调整跟惯量比有很大的关系,若负载电机惯量比过大,伺服参数调整越趋边缘化,也越难调整,振动抑制能力也越差,所以控制易变得不稳定;在没有自适应调整的情况下,伺服系统的默认参数在1~3 倍负载电机惯量比下,系统会达到最佳工作状态,这样,就有了负载电机惯量比的问题,也就是我们一般所说的惯量匹配,如果电机惯量和负载惯量不匹配,就会出现电机惯量和负载惯量之间动量传递时发生较大的冲击;下面分析惯量匹配问题。
TM - TL = ( JM + JL ) α(1)式中,TM———电机所产生的转矩;TL———负载转矩;JM———电机转子的转动惯量;JL———负载的总转动惯量;α———角加速度。
2.2 加减速力矩伺服电机除连续运转区域外,还有短时间内的运转特性如电机加减速,用最大转矩表示;即使容量相同,最大转矩也会因各电机而有所不同。
最大转矩影响驱动电机的加减速时间常数[7],使用公式(3),估算线性加减速时间常数ta,根据该公式确定所需的电机最大转矩,选定电机容量。
ta = ( JL + JM ) n95.5×(0.8Tmax - TL )(3)式中,n ———电机设定速度,r/min;JL———电机轴换算负载惯量,kg·cm2;JM———电机惯量,kg·cm2;Tmax———电机最大转矩,N·m;TL———电机轴换算负载(摩擦、非平衡)转矩,N·m。
2.3 切削负载转矩在正常工作状态下,切削负载转矩不超过电机额定转矩的80%。
连续特性(连续实效负载转矩)对要求频繁起动、制动的数控机床,为避免电机过热,必须检查它在一个周期内电机转矩的均方根值,并使它小于电机连续额定转矩,其具体计算可参考其它文献。
在选择的过程中依次计算此五要素来确定电机型号,如果其中一个条件不满足则应采取适当的措施,如变更电机系列或提高电机容量等2.4 连续过载时间连续过载时间应限制在电机规定时问之内。
FANUC 伺服电机选择方法

• 垂直轴,重量2000kg,螺纹D80mm,L2000mm,p20mm,快速进给20m/分,移动量10mm
1. 重力负载=2000×(0.010/6.28)× 9.8÷0.8 =39Nm应在额定扭矩的70%以内 αiS50Fan没问题 2. 转动惯量=2000×(0.01/6.28)2+765×(0.08)4×2×(1/2)2=0.0207为Jm的5倍左右 αiS50Fan(Jm=0.0145)为1.4倍没问题 3. 快速进给转速=20m/分÷0.01=2000rpm αiS50/3000Fan没问题 4. 快速进给时间常数=快速进给转速×0.105×合计转动惯量÷(最大扭矩-重力负载) αiS50/3000Fan时=2000×0.105×0.0352÷(200-39)=0.046=46msec 过快 αiS100/2500时=2000×0.105×0.0459÷(200-39)=0.060=60msec 过快 5. 如一次旋转移动量動为6.666mm(丝杠减速比1/3), ①重力负载26Nm、②负载转动惯量0.00922kgm2、③快速进给转速3000rpm、 ④快速进给时间常数为111msec(还是过快),用αiS40/4000驱动足够
1. 摩擦负载在额定扭矩的30%以内 2. 负载转动惯量为Jm的5 倍左右 3. 快速进给旋转速度小于最高转速 4. 快速进给时间常数为100~200msec左右 5. 减少一次旋转移动量
• 水平轴,重量10000kg,螺纹D100mm, L4000mm, p20mm,快速进给20m/分,移动量10mm
1. 摩擦负载=10000×(0.010/6.28)× 9.8× 0.1=15.6Nm应在额定扭矩的30%以内 αiS50刚刚够 2. 转动惯量=10000×(0.010/6.28)2+765×(0.1)4×4×(1/2)2=0.102为Jm的5倍左右 αiS50(Jm=0.0145)为7倍、αiS100(Jm=0.0252) 是4倍没问题 3. 快速进给转速=20m/分÷0.010=2000rpm αiS50/3000没问题,αiS100/2500也可以 4. 快速进给时间常数=快速进给转速×0.105×合计转动惯量÷最大扭矩 αiS50/3000时=2000×0.105×0.117÷200=0.123=123msec 足够快 βiS100/2500时=2000×0.105×0.126÷200=0.138=132msec 足够快 5. 如一次旋转移动量为8mm(丝杠的减速比2/5)、 ①摩擦负载=12.5Nm、②负载转动惯量=0.065kgm2为Jm的4.5倍(许可范围内) ③快速进给转速2500rpm、④快速进给时间常数140msec αiS50/3000足够
伺服电机选型计算公式
伺服电机的选型步骤每种型号伺服电机的规格项内均有额定转矩、最大转矩及伺服电机惯量等参数各参数与负载转矩及负载惯量间必定有相关联系存在,选用伺服电机的输出转矩应符合负载机构的运动条件要求,如加速度的快慢、机构的重量;机构的运动方式(水平、垂直旋转)等;运动条件与伺服电机输出功率无直接关系,但是一般伺服电机输出功率越高,相对输出转矩也会越高。
因此不但机构重量会影响伺服电机的选用,运动条件也会改变伺服电机的选用。
惯量越大时,需要越大的加速及减速转矩,加速及减速时间越短时,也需要越大的伺服电机输出转矩。
选用伺服电机规格时,依下列步骤进行。
(1)明确负载机构的运动条件要求,即加/减速的快慢、运动速度、机构的重量、机构的运动方式等。
(2)依据运行条件要求选用合适的负载惯量计算公式计算出机构的负载惯量。
(3)依据负载惯量与伺服电机惯量选出适当的假选定伺服电机规格。
(4)结合初选的伺服电机惯量与负载惯量,计算出加速转矩及减速转矩。
(5)依据负载重量、配置方式、摩擦系数、运行效效率计算出负载转矩。
(6)初选伺服电机的最大输出转矩必须大于加速转矩+负载转矩;如不符合条件,必须选用其他型号计算验证直至符符合要求。
(7)依据负载转矩、加速转矩、减速转矩及保持转矩计算出连续瞬时转矩。
(8)初选伺服电机的额定转矩必须大于连续瞬时转矩,如,如果不符合条件,必须选用其他型号计算验证直至符合要求。
(9)完成选定。
最简单伺服电机选型计算方式伺服电机选择的时候,首先一个要考虑的就是功率的选择。
一般应注意以下两点:1、如果电机功率选得过小。
就会出现“小马拉大车”现象,造成电机长期过载,使其绝缘因发热而损坏,甚至电机被烧毁。
2、如果电机功率选得过大。
就会出现“大马拉小车“现象,其输出机械功率不能得到充分利用,功率因数和效率都不高,不但对用户和电网不利。
而且还会造成电能浪费。
也就是说,电机功率既不能太大,也不能太小,要正确选择电机的功率,必须经过以下计算或比较:P=:F*V/100(其中P是计算功率,单位是KW,F是所需拉力,单位是N,V是工作机线速度m/s)此外。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 引言现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响。
伺服驱动装置是许多机电系统的核心,因此,伺服电机的选择就变得尤为重要。
首先要选出满足给定负载要求的电动机,然后再从中按价格、重量、体积等技术经济指标选择最适合的电机。
设计时进给伺服电机的选择原则是:首先根据转矩-速度特性曲线检查负载转矩,加减速转矩是否满足要求,然后对负载惯量进行校合,对要求频繁起动、制动h的电机还应对其转矩均方根进行校合,这样选择出来的电机才能既满足要求,又可避免由于电机选择偏大而引起的问题。
本文主要叙述了针对VMC 750立式加工中心的功能要求和规格参数,对各轴的伺服电动机进行计算选择,确定FANUC伺服电动机的型号和规格大小,并给出数据表。
同时在论文中简述了各数据的计算公式以及数据计算例子。
让读者能够直观的了解VMC750的伺服电机的数据信息,并知道如何根据一台加工中心的功能要求和规格参数进行数据计算,来选择合适的伺服电机。
2.选择电动机时的必要计算在伺服电机选型计算当中其主要数据包括:负载/ 电机惯量比,加减速力矩,切削负载转矩,连续过载时间等几方面的内容,本节内容便为大家简述了以上重要数据的计算方式。
2.1 负载/ 电机惯量比正确设定惯量比参数是充分发挥机械及伺服系统最佳效能的前提,此点在要求高速高精度的系统上表现尤为突出,伺服系统参数的调整跟惯量比有很大的关系,若负载电机惯量比过大,伺服参数调整越趋边缘化,也越难调整,振动抑制能力也越差,所以控制易变得不稳定;在没有自适应调整的情况下,伺服系统的默认参数在1~3 倍负载电机惯量比下,系统会达到最佳工作状态,这样,就有了负载电机惯量比的问题,也就是我们一般所说的惯量匹配,如果电机惯量和负载惯量不匹配,就会出现电机惯量和负载惯量之间动量传递时发生较大的冲击;下面分析惯量匹配问题。
TM - TL = ( JM + JL ) α(1)式中,TM———电机所产生的转矩;TL———负载转矩;JM———电机转子的转动惯量;JL———负载的总转动惯量;α———角加速度。
2.2 加减速力矩伺服电机除连续运转区域外,还有短时间内的运转特性如电机加减速,用最大转矩表示;即使容量相同,最大转矩也会因各电机而有所不同。
最大转矩影响驱动电机的加减速时间常数[7],使用公式(3),估算线性加减速时间常数ta,根据该公式确定所需的电机最大转矩,选定电机容量。
ta = ( JL + JM ) n95.5×(0.8Tmax - TL )(3)式中,n ———电机设定速度,r/min;JL———电机轴换算负载惯量,kg·cm2;JM———电机惯量,kg·cm2;Tmax———电机最大转矩,N·m;TL———电机轴换算负载(摩擦、非平衡)转矩,N·m。
2.3 切削负载转矩在正常工作状态下,切削负载转矩不超过电机额定转矩的80%。
连续特性(连续实效负载转矩)对要求频繁起动、制动的数控机床,为避免电机过热,必须检查它在一个周期内电机转矩的均方根值,并使它小于电机连续额定转矩,其具体计算可参考其它文献。
在选择的过程中依次计算此五要素来确定电机型号,如果其中一个条件不满足则应采取适当的措施,如变更电机系列或提高电机容量等2.4 连续过载时间连续过载时间应限制在电机规定时问之内。
但是,Tc若小于了Tms则勿需对此项进行检验。
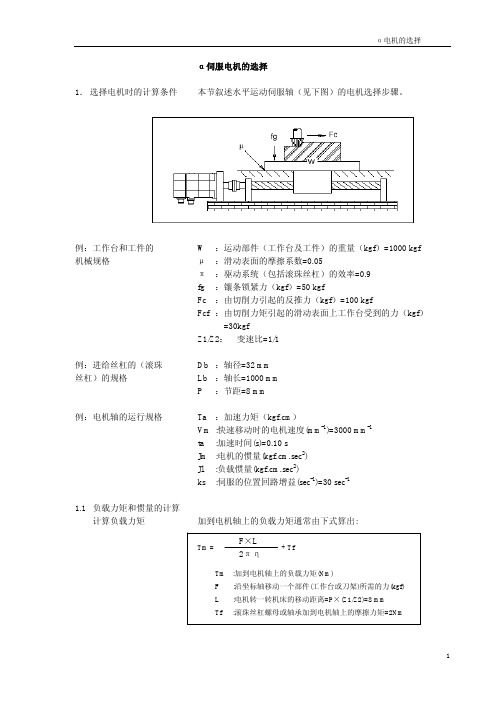
T lam ≤ TMon,式中TLam——连续过载时间,minTMON——电机规定过载时问,min3 VMC 750立式加工中心伺服电机的选择选择电机时的计算条件叙述VMC750立式加工中心伺服轴(见图3-1-1)的电机选择步骤。
图3-1-1 水平运动伺服轴例:工作台和工件的 W :运动部件(工作台及工件)的重量(kgf)=600kgf 机械规格μ:滚动导轨摩擦系数:0.01π:驱动系统的效率:0.95fg :夹具固定力:50kgfFc :由切削力产生的推进阻力:500kgfFcf :由切削力矩产生的工作台对滑动表面的压力:25kgfZ1/Z2:齿轮减速比:1:1例:进给丝杠的(滚珠 Db :轴径=32 mm丝杠)的规格 Lb :长度:900mm,单支承P :螺距:12mm例:电机轴的运行规格快进速度:X、Y轴:30m/min;Z轴:24m/min加速时间:0.1s3.1惯量匹配计算为使伺服进给系统的进给执行部件具有快速相应能力,必须选用加速能力大的电动机,亦即能够快速响应的电机(如采用大惯量伺服电机),但又不能盲目追求大惯量,否则由于不能从分发挥其加速能力,会不经济的。
因此必须使电机惯量与进给负载惯量有个合理的匹配。
通常在电机惯量J M 与负载惯量J L (折算至电动机轴)或总惯量J r 之间,推荐下列匹配关系:141≤≤JJ ML或8.05.0≤≤J J rM或5.02.0≤≤JJ rL3.1.1回转的惯量:回转体:L gJ D432⨯=πγ(kg.m 2)γ ----回转体材料的密度D-----回转体直径 L-----回转体长度 g-----重力加速度有台阶的回转体,按每段计算后相加......)(32241141++=L D L D gJ πγ3.1.2 直线运动物体的惯量⎪⎭⎫ ⎝⎛=π22L g W JW-------直线运动物体的重力L------电机转一圈时物体移动的距离,如电机与丝杠直联,h sp L 丝杠导程= 推倒过程:根据能量守恒定律ω2221)(21J v m m W T T W +=+ 丝杠转一圈时:⎪⎭⎫⎝⎛∆∆+=+tJ th m m T W TW sp π222212)(21于是得:⎪⎪⎭⎫⎝⎛+=+π22)(h m m Jsp TWTW齿轮传动惯量转换:n J n J 2222112121=JiJ 221=负载折算到电机轴上的转动惯量:)(2J J J J i J G W T sp C G ext +++=+J C-----丝杠上联轴器的转动惯量 Jsp-----丝杠转动惯量J TW +-----工作台和工件折算到丝杠上的转动惯量J G------齿轮减速机构的转动惯量iG-------齿轮减速器传动比电机轴上的驱动系统总惯量:J JJM Lgen+=3.2 加减速力矩按下步骤计算加速力矩:计算加速力矩: 步骤1 假定电机由NC 控制加/减速,计算其加速度。
将加速度乘以总的转动惯量(电机的惯量 + 负载惯量),乘积就是加速力矩。
3.2.1 直线加/减速图 3-2-1 直线加/减速时间与速度,速度与转矩关系图Ta = (Vm/60) × 2π×( 1/ta )×Jm ×(1-e -ks 。
ta)++( Vm/60 ) × 2π×(1/ta) ×JL ×(1-e -ks 。
ta)÷ηVr = Vm ×{1-(1/Ta ·ks ) (1 - e -ks 。
ta)}Ta :加速力矩(kgf ·cm)Vm :电机快速移动速度(min-1) ta :加速时间(sec)Jm :电机的惯量(kgf.cm.s2)JL :负载的惯量(kgf.cm.s2) Vr :加速力矩开始下降的速度(与Vm 不同) (min-1)Ks :位置回路的增益(sec-1)η :机床的效率例子:在下列条件下进行直线加/减速:电机为α2/3000。
首先计算电机和负载惯量,然后计算加速转矩。
电机惯量Jm为0.0061(kgf.cm.s2),Vm为3000(min-1),ta为0.1(s),ks为30(sec-1),JL=0.0247(kgf.cm.s2)。
Ta = 3000/60 ×2π×1/0.1×0.0061×(1-e-30×0.1)++ 3000/60×2π×1/0.1×0.0247×(1-e-30×0.1)÷0.9= 100.1(kgf.cm.) = 9.81(Nm)图3-2-2 速度与转矩示意图由α2/3000的速度-转矩特性可以看到,9.81(Nm)的加速力矩处于断续工作区的外面(如图3-2-2的特性曲线和电机的数据单)。
(α2/3000的力矩是不够的。
)如果轴的运行特性(如,加速时间)不变,就必须选择大电机。
比如,选择α3/3000(Jm为0.02 kgf.cm.s2),重新计算加速力矩如下:Ta = 123.7(Kg.cm) = 12.1(Nm)Vr = 2049(min-1)由该式可知,加速时,在转速2049(min-1)时,要求加速力矩为12.1 Nm。
由上面的速度-力矩特性可以看出,用α3/3000 电机可满足加速要求。
由于已将电机换为α3/3000,则法兰盘尺寸已经变为130mm×130mm。
若机床不允许用较大电机,就必须修改运行特性,例如,使加速时间延长。
3.2.2 不控制加/减速时图3-2-3 不控制加/减速时时间与速度,速度与转矩示意图公式为:Ta = ×2π××(Jm+JL)Ta =1/ks计算加速力矩:步骤2为了得到电机轴上的力矩T,应在加速力矩Ta上增加Tm(摩擦力矩)。
T = Ta+TmT = 12.1(Nm)+0.9(Nm) = 13.0 (Nm)计算加速力矩:步骤3核算上面步骤2计算出的力矩T应小于或等于放大器已限定的力矩。
用相应电机的速度-转矩特性和数据单核算由步骤1算得的Vr时的T应在断续工作区内。
因为Vr为2049(min-1),T为13.0(Nm),用指定的时间常数加速是可能的(条件2)3.2.3 计算力矩的均方根值计算快速定位频率绘制快速定位一个周期的速度-时间和转矩-时间图,如下图。
普通切削时,快速定位的频率不会有问题;但是,对于有些频繁快速定位的机床必须检查加/减速电流是否会引起电机过热。
图3-2-4 速度-时间和转矩-时间周期图根据力矩-时间图可以得到一个运行周期的加于电机上力矩的均方根值。
对该值进行核算,确保要小于或等于电机的额定力矩(条件3)如果Trms小于或等于电机静止时的额定力矩(Ts),则选择的电机可以使用。
(考虑到发热系数,核算时静止力矩应为实际静止额定力矩的90%。
例子:在下列条件下选用α3/3000(Ts=31 kgf.cm)=3.0Nm的电机:Ta=12.1 Nm,;Tm=To=0.9 Nm;t1= 0.1 s;t2=1.8s;t3=7.0s。
= 20.2 Nm < Ts×0.9=2.9×0.9=2.61 Nm因此,用α3/3000电机可以满足上述运行条件。