第二部分S的硬件接线
S7200使用入门硬件接线
模拟量输出外部接线图
♦左端起的每3个点为一组, 共二组。每组可作为一 路 模拟量输出(电压或 电流 信号)。
♦第一组V0端接电压负载、 10端接电流负载,M0为 公 共端。
♦第二组的接法与第一组类 同。
♦该模块需要直流24V供电。
—电电 o压 负流负 r载载
—
—电 J电 J压负 «流负 i载 r載
f—
—
■s ® s ® ® ® ®
2. 2 STEP7-Micro/Win的初识
一、软件安装 软件来源:STEP 7Micro/WIN32——西门 子网站下载或光盘。 安装:双击STEP 7-Micro/WIN32的安装程 序setup. exe,根据在线提示,完成安装。
编程语言:选择英语。
界面汉化:安装完后可用STEP 7Micro/WIN 32中文汉化软件将编程界面和
每组可作为一路模拟量的输入通道(电压信号或电流信
号),电压信号用两个端子(A+、A—),电流信号用3 个 端子(RC,C+,C—),其中RC与C+端子短接。未用 的输 入通道应短接(B+、B—)。
命该模块需要直流24V供电(M、L+端)。可由CPU模块的
传 感 器 电 源 24VDC/400mA 供 电 , 也 可 由 用 户 提 供 外 部 电 源。右端分别是校准电位器和配置DIP设定开关。
交流输入模块(EM221 8X120V/230VAC)
有8个分隔式数 字量输入端子, 每个输入点都占 用二个接线端子 o
ON ON .0 IN . 1 2N . 2 3X 3N .3
.4 5N 5\ .5 6X 6> . 6 7X 7N . 7
000000000000
Kinco FD2(S)系列伺服驱动器使用手册

目录目录 (I)第一章产品确认与型号说明 (1)1.1产品确认 (1)1.1.1产品确认事项 (1)1.2产品各部分名称 (2)1.2.1FD2S系列伺服驱动器各部分名称 (2)1.2.2伺服电机各部分名称 (2)第二章使用事项与安装要求 (3)2.1注意事项 (3)2.2环境条件 (3)2.3安装方向与间距 (3)第三章FD2S系列伺服驱动器接口及连线 (5)3.1FD122驱动器接口及连线介绍 (5)3.1.1FD122驱动器接口介绍 (5)3.1.2FD122驱动器外部接线图 (6)3.1.3FD122驱动器端口接线定义 (7)3.1.3.1总线接口(X1) (8)3.1.3.2通讯接口(X2) (8)3.1.3.3I/O接口(X3) (8)3.1.3.4编码器输入接口(X4) (9)3.1.3.5电机电源输入接口(X5) (10)3.2FD2S系列伺服驱动器接口及连线介绍 (10)3.2.1FD2S系列伺服驱动器接口介绍 (10)3.2.2FD2S驱动器外部接线图 (11)3.2.3FD2S驱动器端口接线定义 (12)3.2.3.1I/O接口定义(X1) (13)3.2.3.2逻辑电源和抱闸输入输出接口(X2) (13)3.2.3.3电机电源输入接口(X3) (13)3.2.3.4总线接口(X4) (14)3.2.3.5通讯接口(X5) (14)3.2.3.6编码器输入接口(X6) (14)第四章KINCO伺服上位机调试软件 (16)4.1软件安装 (16)4.2PC与FD2S驱动器通讯 (16)4.2.1RS232通信 (16)4.2.2CANopen通信 (16)4.3操作界面 (17)4.3.2计算机菜单 (17)4.3.3驱动器菜单 (19)4.3.3.1基本操作 (19)4.3.3.2控制环 (19)4.3.3.3I/O口 (21)4.3.3.4工作模式 (21)4.3.3.5数据字典 (22)4.3.3.6驱动器配置 (22)4.3.3.7ECAN (22)4.3.3.8示波器 (24)4.3.3.9实时错误 (26)4.3.3.10历史错误 (26)4.3.3.11控制面板 (27)4.3.3.12初始化/保存 (27)4.3.3.13驱动器属性 (27)4.3.4电机菜单 (27)4.3.5扩展功能菜单 (28)4.3.5.1读驱动器配置步骤 (28)4.3.5.2写驱动器配置步骤 (30)4.4建立新工程一般步骤 (31)第五章电机配置与试运转操作 (34)5.1电机配置 (34)5.1.1FD2S系列伺服驱动器按键操作配置电机 (34)5.1.2FD2S系列伺服驱动器上位机操作配置电机 (35)5.2EASY USE使用说明(用于设置重要参数和自整定) (36)5.3试运转操作 (44)5.3.1试运转操作目的 (44)5.3.2试运转操作注意事项 (44)5.3.3试运转最小系统 (44)5.3.3.1连接编码器电缆到驱动器 (44)5.3.3.2连接电机电缆(带或不带抱闸)到驱动器 (44)5.2.3.3连接逻辑电源和抱闸电源线到驱动器 (44)5.3.3.4编码器信号检查 (45)5.2.3.5给驱动器提供动力电源 (45)5.3.4试运转操作步骤 (45)5.3.4.1数字操作面板操作步骤 (45)5.3.4.2Kinco伺服上位机调试软件操作步骤 (46)第六章工作模式 (47)6.1位置模式(“1”模式) (47)6.2速度模式(“-3”和“3”模式) (47)6.2.2模拟输入控制 (48)6.2.2.1模拟速度模式参数列表 (49)6.2.2.2模拟速度模式操作实例 (50)6.3转矩模式(“4”模式) (52)6.3.1通讯控制 (52)6.3.2模拟输入控制 (53)6.3.2.1模拟力矩模式参数列表 (53)6.3.2.2模拟力矩模式操作实例 (54)6.4脉冲模式(“-4”模式) (56)6.4.1脉冲模式参数介绍 (58)6.4.1.1电子齿轮比 (58)6.4.1.2脉冲模式选择 (58)6.4.1.3脉冲滤波系数 (59)6.4.2脉冲模式操作实例 (59)6.4.2.1驱动器参数设置 (59)6.4.2.2运行结果 (61)6.5原点模式(“6”模式) (62)6.7自动翻转 (62)6.7.1自动翻转参数列表 (63)6.7.2自动翻转操作实例 (63)第七章控制性能 (65)7.1电流环 (65)7.2速度环 (66)7.2.1速度环参数列表 (66)7.2.2速度环比例增益调节 (66)7.2.3速度环积分增益调节 (68)7.2.4速度环反馈滤波调节 (70)7.2.5速度环带宽计算 (70)7.3位置环 (71)7.3.1位置环参数列表 (71)7.3.2位置环比例增益调节 (71)7.3.3位置环速度前馈调节 (73)7.3.4位置环加速度前馈 (75)7.3.5平滑滤波 (75)7.4震动抑制 (78)第八章通讯功能 (79)8.1RS232通讯 (79)8.1.1RS232接线说明 (79)8.1.2RS232通讯参数列表 (80)8.1.3RS232自由传输协议 (80)8.1.4.1下载 (81)8.1.4.2上传 (83)8.2RS485通讯 (84)8.2.1RS485接线说明 (84)8.2.2RS485通讯参数列表 (84)8.2.3MODBUS RTU通讯协议 (85)8.2.3.1Modbus RTU通讯协议基本格式 (85)8.2.3.2Modbus常用功能码简介 (85)8.3CAN OPEN总线通讯 (86)8.3.1CANopen总线通讯硬件说明 (87)8.3.2CANopen总线通讯软件说明 (88)8.3.2.1EDS说明 (88)8.3.2.2SDO说明 (88)8.3.2.3PDO说明 (90)8.3.2.4PDO COB-ID说明 (90)8.3.2.5FD2S系列伺服驱动器支持的COB-ID (91)8.3.2.6保护方式/监督类型说明 (92)8.3.2.7启动过程说明 (92)8.3.3CANopen总线通讯参数列表 (94)第九章报警排除 (95)9.1报警信息 (95)9.2报警信息原因及排除 (95)附录一FD2S系列伺服驱动器参数列表 (97)参数列表:F000组(设置驱动器指令) (97)参数列表:F001组(设置实时显示数据) (98)参数列表:F002组(设置控制环参数) (100)参数列表:F003组(设置输入输出及模式操作参数) (103)参数列表:F004组(设置电机参数) (107)参数列表:F005组(设置驱动器参数) (109)附录二常见负载惯量计算 (112)附录三原点模式介绍 (115)附录四FD2S伺服驱动器与F1系列PLC通讯方法 (120)1软硬件需求 (120)2安装F1-PLC TARGET文件 (120)3建立工程一般步骤 (122)3.1新建工程 (122)3.2PLC配置 (124)3.3设置通讯参数 (125)1FD2S系列伺服驱动器与F1PLC利用CAN OPEN总线进行通讯 (129)2FD2S伺服与P EAK CAN利用CAN OPEN总线进行通讯 (133)2.1通讯连接 (133)2.2报文列表 (135)附录六RS485串口通讯范例 (137)1FD2S系列伺服驱动器与KINCO触摸屏M ODBUS协议通讯 (137)1.1注意事项 (137)1.2触摸屏控制单台FD2S伺服 (137)1.2.1硬件接线 (137)1.2.2通讯参数设置 (137)1.2.3地址参数设置 (138)1.3触摸屏控制多台FD2S伺服 (139)1.3.1硬件接线 (139)1.3.2参数设置 (139)2伺服驱动器与串口调试工具M ODBUS协议通讯 (140)2.1硬件连接 (140)2.2驱动器参数设置 (140)2.3驱动器控制 (140)2.4报文格式 (141)3伺服驱动器与西门子S7-200M ODBUS协议通讯 (142)3.1硬件接线 (142)3.2通讯参数设置 (142)3.3程序编制 (143)3.4范例程序说明 (143)附录七RS232串口通讯范例 (144)1伺服与KINCO触摸屏自由协议通讯 (144)1.1注意事项 (144)1.2触摸屏控制单台伺服驱动器 (144)1.2.1硬件接线 (144)1.2.2通讯参数设置 (144)1.2.3地址参数设置 (145)1.3触摸屏控制多台伺服驱动器 (146)1.3.1硬件接线 (146)1.3.2参数设置 (146)2伺服驱动器与串口调试工具自由协议通讯 (147)2.1硬件连接 (147)2.2通讯参数设置 (147)2.3驱动器控制 (147)2.4报文格式 (149)附录八常用对象工程单位与内部单位换算关系表 (151)附录九常用对象列表 (152)1模式及控制(0X6040) (152)2测量数据 (153)3目标对象(0X607A) (154)4多段位置/多段速度(0X2020) (154)5性能对象(0X6065) (155)6原点控制(0X6098) (156)7速度环参数(0X60F9) (156)8位置环参数(0X60FB) (156)9输入输出口参数(0X2010) (156)10脉冲输入参数(0X2508) (158)11用于存储的参数(0X2FF0) (159)12错误代码(0X2601) (159)附录十制动电阻规格选择 (161)附录十一保险丝规格选择 (162)第一章产品确认与型号说明首先,感谢您使用Kinco伺服系统产品,Kinco系列不同型号驱动器的配件各不相同,建议您对产品进行确认。
2-SM硬件产品

HOLLiAS—MACS系统硬件
4
SM硬件产品
• 现场控制机柜
– 机笼、端子模块安装在机柜FP069中。在机柜FP069中,推荐的 典型配置是正面安装4个机笼(极限情况可以装6个机笼,但较为 拥挤),机柜背面安装3列端子模块,每列最多可以安装15块标准 端子模块(标准端子的高度为100mm,冗余端子的高度为150mm, 大继电器端子的高度为300mm)。 – 结构及安装尺寸 • 现场控制机柜为框式结构,前后开门,左右侧板可拆卸。机柜 前后门下方设计有通风孔、防尘罩,机柜顶部装有排风单元, 前门内侧设有文件架,机柜顶部装有四个吊环。 • 机柜底座与机柜主体之间为橡胶绝缘。机柜底座有4个M12的 地脚螺钉孔。
HOLLiAS—MACS系统硬件
15
SM硬件产品
• 机笼单元
– 后接线型主控机笼SM120: • 终端匹配开关:前面板设有4 位终端匹配拨码开关“TR‖,拨 码全部拨向“ON‖,匹配开关闭合,连通终端匹配电阻;全部 拨离“ON‖,匹配开关打开,断开终端匹配电阻。终端匹配
开关只有在最远端的一个机笼上才拨至闭合,连接 终端电阻,吸收信号的反射和回波,其他机笼则不 用接入终端电阻。
HOLLiAS—MACS系统硬件
33
HOLLiAS—MACS系统硬件
34
SM硬件产品
• 220VAC 交流配电模块SM932/SM933
HOLLiAS—MACS系统硬件
29
HOLLiAS—MACS系统硬件
30
SM硬件产品
• 电源分配模块
– SM341/SM340 48VDC电源分配端子模块 • 概述:1路48VDC输入16路48VDC输出;自恢复保险丝输出短 路保护
第二章:交换机技术基础(T接线器和S接线器原理)
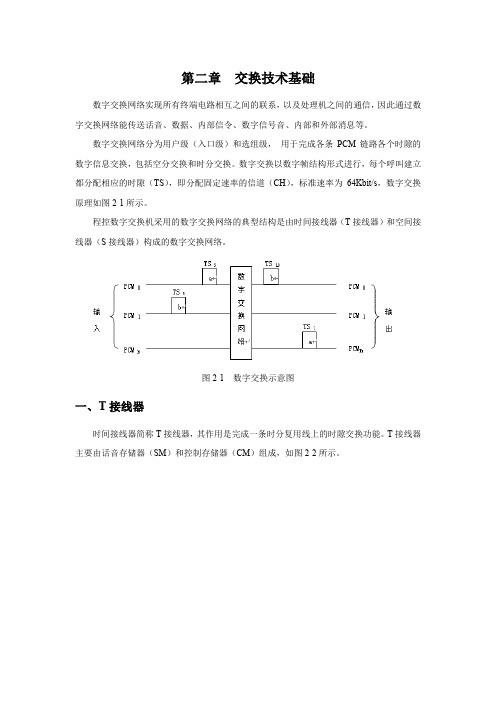
第二章交换技术基础数字交换网络实现所有终端电路相互之间的联系,以及处理机之间的通信,因此通过数字交换网络能传送话音、数据、内部信令、数字信号音、内部和外部消息等。
数字交换网络分为用户级(入口级)和选组级,用于完成各条PCM链路各个时隙的数字信息交换,包括空分交换和时分交换。
数字交换以数字帧结构形式进行,每个呼叫建立都分配相应的时隙(TS),即分配固定速率的信道(CH),标准速率为64Kbit/s,数字交换原理如图2-1所示。
程控数字交换机采用的数字交换网络的典型结构是由时间接线器(T接线器)和空间接线器(S接线器)构成的数字交换网络。
图2-1 数字交换示意图一、T接线器时间接线器简称T接线器,其作用是完成一条时分复用线上的时隙交换功能。
T接线器主要由话音存储器(SM)和控制存储器(CM)组成,如图2-2所示。
图2-2 T接线器话音存储器用来暂存话音数字编码信息,每个话路为8bit。
SM的容量即SM的存储单元数等于时分复用线上的时隙数。
控制存储器用来存放SM的地址码(单元号码),CM的容量通常等于SM的容量,每个单元所存储SM的地址码是由处理机控制写入的。
就CM对SM的控制而言,T接线器的工作方式有两种:一种是“顺序写入,控制读出”;另一种是“控制写入,顺序读出”。
T接线器的工作方式是指话音存储器的工作方式。
至于控制存储器的工作方式正好与话音存储器的工作方式相反。
图2-2中T接线器采用“顺序写入,控制读出” 工作方式,T接线器完成了把入线上TS3的话音信息a交换到出线上TS19,即话音信息a从TS3→TS19;同时完成了把入线上TS19的话音信息b交换到出线上TS3,即话音信息b从TS19→TS3。
通过这两次时隙交换就实现了A、B两个用户的双向通信。
T接线器中的存储器采用高速随机存取存储器。
二、S接线器空间接线器简称S接线器,其作用是完成不同时分复用线之间在同一时隙的交换功能,即完成各复用线之间空间交换功能。
04 PWM、PPM、S.bus与DSM2接线方式解析

PWM、PPM、S.bus与DSM2接线方式解析一、PWM1、PWM的含义PWM ,Pulse Width Modulation的缩写,英文意思是脉宽调制,在航模中主要用于舵机的控制。
这是一种古老而通用的工业信号,是一种最常见的控制信号。
该信号主要原理是通过周期性跳变的高低电平组成方波,来进行连续数据的输出。
如下图所示:Paste_Image.png而航模常用的PWM信号,其实只使用了它的一部分功能,就是只用到高电平的宽度来进行信号的通信,而固定了周期,并且忽略了占空比参数。
PWM的优点很明显:由于传输过程全部使用满电压传输,非0即1,很像数字信号,所以他拥有了数字信号的抗干扰能力。
脉宽的调节是连续的,使得它能够传输模拟信号。
PWM信号的发生和采集都非常简单,现在的数字电路则使用计数的方法产生和采集PWM信号。
信号值与电压无关,这在电压不恒定的条件下非常有用,比如电池电压会随消耗而降低,DCDC都会存在纹波等等,这些因素不会干扰信号的传输。
2、PWM通信协议高电平有效。
高电平电压:常见4.8~6V,也有使用3.3V 和更高电压的,要看舵机的承受能力。
信号周期:常见50Hz和300Hz两种,前者被称为模拟舵机,后者被称为数字舵机。
注意纠正一个概念,舵机的模拟和数字之分其实指的是信号采集器,是使用模拟电路还是使用数字电路,跟信号频率无关,当然数字采集器的采集能力较强,所以频率可以高一些。
但是随着技术进步,现在即使买50Hz的舵机也同样使用数字电路进行信号采集,哪里来的模拟舵机呢?建议大家忘记这两个词汇吧。
脉宽宽度:50Hz信号多用于老式舵机,是上个世纪舵机的主要控制信号形式,其脉宽宽度为0.5ms至2.5ms。
300Hz 信号则是目前使用的最广泛的信号形式,其波形速度快,每秒可以传输300次,所以相应的脉宽也有所减小为0.9ms至2.1ms。
两种舵机控制信号如下图所示:50hz与300hz的PWM控制信号与角度关系PPM二、什么是PPMPWM信号被广泛用于舵机控制,但是它有一个明显的缺陷,就是有多少个舵机就需要多少个控制线路。
S端子定义与图解
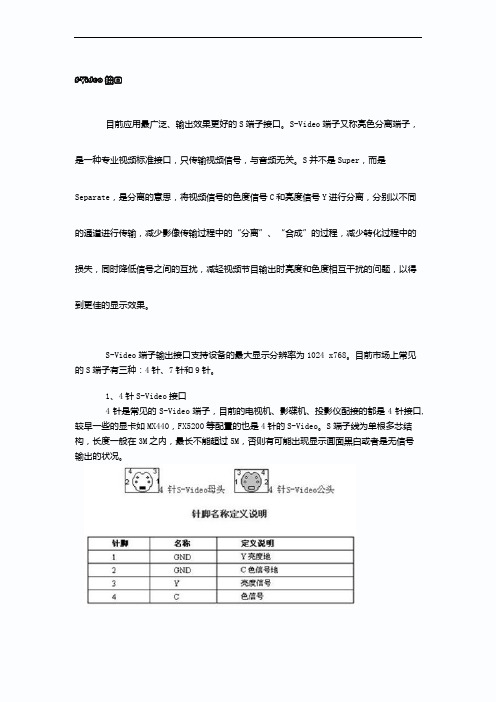
S-Video接口目前应用最广泛、输出效果更好的S端子接口。
S-Video端子又称亮色分离端子,是一种专业视频标准接口,只传输视频信号,与音频无关。
S并不是Super,而是Separate,是分离的意思,将视频信号的色度信号C和亮度信号Y进行分离,分别以不同的通道进行传输,减少影像传输过程中的“分离”、“合成”的过程,减少转化过程中的损失,同时降低信号之间的互扰,减轻视频节目输出时亮度和色度相互干扰的问题,以得到更佳的显示效果。
S-Video端子输出接口支持设备的最大显示分辨率为1024 x768。
目前市场上常见的S端子有三种:4针、7针和9针。
1、4针S-Video接口4针是常见的S-Video端子,目前的电视机、影碟机、投影仪配接的都是4针接口,较早一些的显卡如MX440,FX5200等配置的也是4针的S-Video。
S端子线为单根多芯结构,长度一般在3M之内,最长不能超过5M,否则有可能出现显示画面黑白或者是无信号输出的状况。
实际上视频信号的传输主要取决于传输线的质量,如果主观能够接受不易觉察的图像质量下降并使用高品质信号线,信号的传输距离可以达到30米;如果使用两根信号线传输(在S端子接口处汇合)的高品质75ohm同轴电缆(如RG59 or RG6),传输距离甚至可以达到60-100米。
2、7针S-Video接口标准的7针S-Video比较4针的多出了一路复合信号,可以单独分离输出RCA信号(复合信号),在显卡上就可以省去一个黄色的VIDEO输出接口。
虽然多出的2针功能和定义各不相同,但一般都是把这两针作为标准AV视频信号输出,这样就使得这个7针接口即能分离出一路4针标准S端子信号,又能分离出一路标准的AV视频信号。
有的配备7针S端子的显卡配备一个一转二的转接输出装置,可以分成S端子和AV输出两种模式。
不过,7针的S-Video接口可以直接使用4针S端子线,不必另行购买连接线。
另外,还有部分显卡自带的7针S-Video能够提供色差输出,其针脚的定义有别于上述标准,定义如下:先看一下N卡标准9针色差输出图示可以看到N卡的标准9针色差输出针脚定义为:Pr第一排第一个针脚Pb第二排第二个针脚Y第一排第三个针脚而A卡的标准9针色差输出针脚定义为:Pr第一排第一个针脚Pb第一排第二个针脚Y第一排第三个针脚7针和9针的区别只是下部的空档位变成了2个针脚位而已。
亚锐SR系列智能控制器用户手册说明书

序 言序 言感谢您选购了本公司SR系列智能控制器,这说明您对本产品有了充分的了解。
为了您更好地使用本产品,烦请您在使用之前花些时间阅读以下本手册。
本手册将指导您如何安装、使用及软件编程,同时您将会发现本产品有更优越的性能,从而将会使您更方便地使用本产品。
SR系列智能控制器是一种采用功能块编程,并附有LCD液晶显示的智能控制器。
它将以往的PLC中需要用一大段指令程序才完成的控制功能换成用一个功能块来实现。
若干个功能块按照特定的方式连接在一起即可完成较为复杂的控制功能,从而将编程工作大大地简化。
SR系列智能控制器的应用极为广泛,可用于机械设备自动化配套、流程控制、楼宇自动控制等各个领域。
它真正使得自动控制走进生活的每个空间。
本手册将详细介绍SR系列控制器的功能特点及使用方法。
注意:1. 手册及机器之专利权属于亚锐电子有限公司,非经许可不得影印或转载本手册全部或部分内容。
2.公司保有设计及变更之权力,若有变更,恕无法另行通知。
3.手册尚有缺失,欢迎广大用户给与予赐教指正,及时与本公司取得联系,我们会将您的意见纳入下一版的修订之中。
1SR Intelligent Controller注意:1.本S R系列严格按照功能块号的先后顺序进行循环扫描执行。
功能块号小的先执行,功能块号大的后执行。
2.本S R系列中扩展模块、语音模块,遥控接收点模块以及前置通讯等模块要在主机模块之前接通电源,最迟应在和主机同时接通电源,不得迟于主机接通电源,否则主机在进行系统配置检测时可能检测不到这个模块而造成系统不能正常工作.2目录目 录第一部分 S R的基本操作与应用第一章 S R简介1.1 SR的结构 (1)1.2 SR系列产品命名规则 (2)1.3 SR系列产品规格型号 (3)1.4 SR特性 (5)第二章 S R的安装与接线2.1 SR的安装 (8)2.1.1 安装方法 (8)2.1.2 安装尺寸 (8)2.2 SR的接线 (10)2.2.1 电源连接 (10)2.2.2 输入连接 (10)2.2.3 输出连接 (12)2.2.4 SR系列产品配合连接 (14)第三章 S R功能块概述3.1 基本功能块(GF),共8个 (16)3.1.1 AND(与逻辑) (18)3.1.2 AND带RLO边缘检测 (19)3SR Intelligent Controller3.1.3 OR(或逻辑) (19)3.1.4 NOT(非逻辑) (20)3.1.5 XOR(异或逻辑) (21)3.1.6 NAND(与非逻辑) (21)3.1.7 NAND带RLO边缘检测 (22)3.1.8 NOR(或非逻辑) (23)3.2 特殊功能块(SF),共14个 (24)3.2.1 延时接通功能块(TOND) (26)3.2.2 延时断开功能块(TOFD) (27)3.2.3 脉冲继电器功能块(SPBL) (28)3.2.4 RS继电器功能块(TPBL) (29)3.2.5 时钟脉冲发生器功能块(BLNK) (30)3.2.6 保持接通延时继电器功能块(MTOD).313.2.7 单脉冲时间继电器功能块(PONS)..323.2.8 万能计数器功能块(UDCT) (33)3.2.9 通用模拟量比较器功能块(CMPR)..343.2.10 时间/计数比较器功能块(T/C-CMPR) (38)3.2.11 时钟开关功能块(SCHD) (40)3.2.12 时序输出功能块(TSEQ) (42)3.2.13 步序输出功能块(SSEQ) (44)3.2.14 小时增减功能块(HOUR) (45)3.2.15 属性脚说明 (45)3.3 SR输入输出点及语音类功能块,共8个 (47)4目录3.3.1 输入点(IN) (48)3.3.2 输出点(OUI) (49)3.3.3 遥控输入点(RCI) (50)3.3.4 电话输出信息功能块(DOUT) (50)3.3.5 电话输入功能块(D-IN) (53)3.3.6 播放语音段选择开关功能块(PMSG) (55)3.3.7 软件编程连接点(CONT) (56)3.3.8 人机界面编辑(SLCD) (57)第四章 人机界面S R-H M I模块的使用说明4.1 与传统控制器LCD的比较 (58)4.2 SR-HMI应用实例 (63)4.3 人机界面的编辑 (66)4.4 虚拟按键的使用 (74)4.5 口令设置 (76)4.6 SR-HMI软件帮助的使用 (77)4.7 SR-HMI使用说明 (77)4.7.1 系统时间的修改方法 (79)4.7.2 修改Counter的参数 (80)4.7.3 修改Timer的参数值 (80)4.7.4 修改Analog的参数值 (80)4.7.5 功能键的使用 (81)4.7.6 主机运行与停止状态的切换 (81)5SR Intelligent Controller4.8 SR-HMI屏幕上的错误信息含义及处理方法 (83)第五章 电话、语音模块5.1 语音模块结构 (86)5.2 语音模块与SR主机的连接 (87)5.3 语音模块使用说明 (88)5.4 语音模块使用举例 (91)5.5 语音软件说明 (95)5.6 语音模块软件使用举例 (98)5.7 录制语音段 (101)第六章 遥控模块与扩展模块6.1 遥控模块 (104)6.1.1 遥控接收模块的结构 (104)6.1.2 遥控模块与主机、语音模块的连接 (105)6.1.3 SR-TC遥控发射器使用 (107)6.2 扩展模块 (107)6.2.1 扩展模块的结构 (108)6.2.2 扩展模块的地址设置 (109)6.2.3 扩展模块的型号与接线 (109)6.3 SR系列产品实体图及其配件 (112)6目录第七章 S R系列技术参数7.1 SR-12MRAC/SR-22MRAC型技术参数 (115)7.2 SR-12MRDC/SR-22MRDC型技术参数 (116)7.3 SR-12MTDC/SR-22MTDC型技术参数 (118)7.4 SR-12MGDC/SR-22MGDC型技术参数 (119)7.5 SR-20ERA/SR-20ERD/SR-20ETD/SR-20EGD扩展模块技术参数 (120)7.6 电话收发号及语音模块 (124)7.7 遥控 (124)7.7.1 遥控接收模块 (124)7.7.2 遥控发射器 (124)7.8 SR系列产品通用技术参数 (124)第八章 SR的应用8.1 楼梯、大厅、走廊照明多功能开关 (126)8.2 自动门控制 (127)8.3 通风系统 (128)8.4 展示橱窗照明系统 (129)8.5 水塔自动供水系统 (130)第九章 品质保证声明7SR Intelligent Controller第十章 SR-WRT编程面板操作及功能10.1 SR-WRT的结构 (134)10.2 SR-WRT显示界面及功能 (135)10.3 SR-WRT的功能界面 (136)10.4 SR-WRT 的编程操作 (137)10.4.1 New Prg操作 (137)10.5 Edit Prg操作 (139)10.5.1 Edit FB操作 (139)10.5.2 Delete FB操作 (140)10.5.3 Insert FB操作 (141)10.6 File操作 (142)10.6.1 Rename操作 (142)10.6.2 Copy操作 (143)10.7 Set up操作 (145)10.8 Test A B操作 (146)10.9 SR-WRT编程举例 (149)8目录第二部分 SR编程软件SUPER CAD第一章 安装与卸载1.1 软件的安装 (158)1.2 软件的卸载 (163)第二章 SUPER CAD简介2.1 操作界面 (165)2.2 编辑窗口 (166)2.3 主要功能 (166)第三章 操作指令和功能块库3.1 功能指令 (168)3.1.1 文件 (168)3.1.2 编辑 (169)3.1.3 控制器 (169)3.1.4 通讯界面 (169)3.1.5 窗口 (170)3.1.6 设置 (170)3.1.7 帮助 (171)3.1.8 查找 (172)3.2 工具栏 (173)3.3 功能块库 (174)9SR Intelligent Controller3.3.1 功能块分类 (175)3.3.2 功能块属性设置及动作演示 (175)3.3.2.1 通用属性 (175)3.3.2.2 特殊属性设置 (176)第四章 基本操作4.1 开启文档 (187)4.1.1 开启新的文档 (187)4.1.2 开启原有文档 (188)4.2 编写功能图程序 (189)4.2.1 放置功能块 (189)4.2.2 功能块库介绍 (190)4.2.3 功能块表 (191)4.2.4 编辑功能块属性 (193)4.2.5 建立连线 (194)4.2.6 删除功能块或删除连线 (195)4.2.7 模拟运行 (196)4.2.8 存储和打印 (197)4.2.9 修改密码及读取 (198)警告本手册包含了您应该注意的事项以确保您的人身安全,以及保护产品和连接的设备。
TN-C-S及TN-C接线图
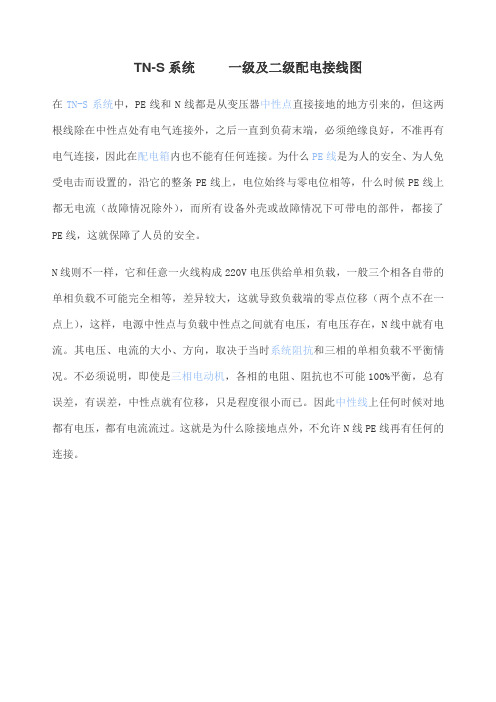
TN-S系统一级及二级配电接线图
在TN-S系统中,PE线和N线都是从变压器中性点直接接地的地方引来的,但这两根线除在中性点处有电气连接外,之后一直到负荷末端,必须绝缘良好,不准再有电气连接,因此在配电箱内也不能有任何连接。
为什么PE线是为人的安全、为人免受电击而设置的,沿它的整条PE线上,电位始终与零电位相等,什么时候PE线上都无电流(故障情况除外),而所有设备外壳或故障情况下可带电的部件,都接了PE线,这就保障了人员的安全。
N线则不一样,它和任意一火线构成220V电压供给单相负载,一般三个相各自带的单相负载不可能完全相等,差异较大,这就导致负载端的零点位移(两个点不在一点上),这样,电源中性点与负载中性点之间就有电压,有电压存在,N线中就有电流。
其电压、电流的大小、方向,取决于当时系统阻抗和三相的单相负载不平衡情况。
不必须说明,即使是三相电动机,各相的电阻、阻抗也不可能100%平衡,总有误差,有误差,中性点就有位移,只是程度很小而已。
因此中性线上任何时候对地都有电压,都有电流流过。
这就是为什么除接地点外,不允许N线PE线再有任何的连接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三、S7-300的接线 1、紧凑型CPU的接线 (1)数字I/O的接线
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
【例】某设备的控制器为CPU314C-2DP,控制三相交流电动机 的启停控制,并有一只接近开关限位,请设计接线图。
二、S7-300常用模块
1、S7-300系列模块简介 S7-300系列PLC是模块化结构设计的PLC,各个单独模块之间可 进行广泛组合和扩展。它的主要组成部分有电源模块(PS)、 中央处理器模块(CPU)、导轨(RACK)、接口模块(IM)、信 号模块(SM)和功能模块(FM)等。
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
两线式的两根线既是电源线又是信号线;三线 式的两根线是电源线,一根线是信号线;四线式 的两根线是电源线,两根线是信号线;
流量传感器
均为非法!!!
1
传感器电源+
传感器信号+
2
传
感
3
器
传感器电源-
传感器信号-
4
电压信号传感器的具体接法
压力变送器
压力传感器
解:CPU和扩展模块以及扩展模块之间通过总线连接器连接; 数字量输入模块是PNP输入;数字量输出模块是继电器输出,由 于电磁阀的额定电压有24VDC和220V AC两种,所以一般选用继电 器输出模块,而且不同额定电压的电磁阀不连接到一组;模拟量 输出信号为电压信号,采用四线式连接(当然也可以采用两线式 连接),接线图如图所示。
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
二线式电流信号变送器的具体接法
四线式电流信号变送器的具体接法
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
三线式电流信号变送器的具体接法
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
2、数字量模块的接线
1)数字量输入模块SM321
发展而来。S7-200 SMART是2012年7月推出的,是S7-200的升级
版。西门子在2013年汉诺威发布了S7-1500,现已有产品出售。
LOGO
S7-200 S7-200SMART S7-1200 S7-300
S7-400
S7-1500
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
(2)CPU模块的技术参数
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
(3)CPU的状态与故障显示LED
CPU 317-2DP 的面板如图所示,其他的CPU的面板和CPU 317-2DP类似。
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
2、S7-300的CPU模块简介
S7-300的CPU模块共有20多个不同的型号,按照性能等级划分,可 涵盖各种应用领域。主要分以下几类: (1)CPU模块的分类 ①紧凑型CPU,包括CPU 312C,313C,313C-PtP,313C-2DP, 314C-PtP和314C-2DP。 ②标准型CPU,包括CPU 312,313,314,315,315-2DP 和3162DP。 ③户外型CPU,包括CPU 312 IFM,314 IFM,314 户外型和3152DP。在恶劣的环境下使用。 ④高端CPU,包括317-2DP 和CPU 318-2DP。 ⑤故障安全型CPU,CPU 315F,不需要对故障I/O进行额外接线, 可以组态成一个故障安全型自动化系统。
SF(系统出错/故障显示,红色):CPU 硬件故障或软件错 误时亮。
BATF(电池故障,红色):电池电压低或没有电池时亮。 DC 5V(+5V 电源指示,绿色): 5V 电源正常时亮。 FRCE(强制,黄色):至少有一个I/O 被强制时亮。 RUN(运行方式,绿色):CPU 处于RUN 状态时亮;重新启
7)接口模块(IM),接口模块用于多机架配置时连接主机架 (CR)和扩展机架(ER)。S7-300通过分布式的主机架和连接的 扩展机架(最多可连接三个扩展机架),可以操作最多32个模块。
对于S7-300,IM365接口模块是经济型的,只有一个扩展机架时, 中央机架和扩展机架使用1对IM365,且优先选用IM365;当扩展机 架超过2个(含2个)时,中央机架用IM360,扩展机架用IM361。
LOGO!
S7-200
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
S7-200SMART
S7-1200
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
S7-300
S7-400
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
S7-1500
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
5)功能模块(FM),功能模块主要用于对实时性和存储量要求 高的控制任务。如计数模块FM350、定位模块FM353、闭环模块 FM355等。
6)通信处理模块(CP),通信处理模块用于PLC之间、PLC与计 算机和其他智能设备之间的通信,可以将PLC接入工业以太网、 PROFIBUS和AS-I网络,或用于串行通信。它可以减轻CPU处理通信 的负担,并减少用户对通信功能的编程工作。
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
继电器数字量输出模块接线图
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
3、模拟量输入模块SM331连接
(1)SM331的接线
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
(2)量程卡的设置
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
CPU315-2DP L+ M
SM321 2 3 4 20 1 3
SM322 45 7
能的模式选择器开关位置。通过模式选择器开关进行CPU 存 储器复位需要特定操作顺序。 复位存储器操作:通电后从STOP 位置扳到MRES 位置, “STOP”LED 熄灭1s,亮1s,再熄灭1s 后保持亮。放开开关, 使它回到STOP位置,然后又回到MRES,“STOP”LED 以2Hz 的频率至少闪动3s,表示正在执行复位,最后“STOP”LED 一直亮。
动时以2 Hz 的频率闪亮; HOLD(单步、断点)状态时以 0.5Hz 的频率闪亮。 STOP(停止方式,黄色):CPU 处于STOP,HOLD 状态或重 新启动时常亮。 BUSF(总线错误,红色)。
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
(4)模式选择开关 RUN 模式, CPU 执行用户程序。 STOP 模式, CPU 不执行用户程序。 MRES,CPU 存储器复位,带有用于CPU 存储器复位的按钮功
先进行硬件组态 硬件组态界面 自动显示两成卡 的位置,A或B 或C或D
注意:硬件组态和下一页的量程卡的设置要一致
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
撬开量程卡(黑色小方块),把A或B或C或D,对上图中的三角
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
4、模拟量输出模块SM332连接
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
说明: 1)电源模块(PS),电源模块用于向CPU及其扩展模块提供+24V DC电源。 2)中央处理器模块(CPU),S7-300的CPU模块主要包括CPU312、 CPU312C、CPU313C、CPU313C-2PtP、CPU314C-2DP等型号,有的型 号还有不同的版本号(如CPU314-2DP目前有2.0版和2.6版),每 种CPU有其不同的性能。 3)导轨(RACK),导轨是安装S7-300 各类模块的机架,它是特制 的异形板,其标准长度有160mm、482mm、530mm、830mm和2000mm, 可以根据实际选用。 4)信号模块(SM),信号模块是数字量I/O模块和模拟量I/O模块 的总称。信号模块主要有SM321(数字量输入)、SM322(数字量 输出)、SM331(模拟量输入)和SM332(模拟量输出)等模块。
解:根据题意,只需要3个输入点和一个输出点,因此使用 CPU314C-2DP上集成的I/O即可,输入端和输出端都是PNP型, 因此接近开关只能用PNP型的接近开关(不用转换电路时),接 线图如图所示。交流电动机的启停一般要用交流接触器。
CPU314C-2DP
+24V 1(1L+)
SB1
2
SB2
3
棕
蓝
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
【例】某设备的控制器为CPU315-2DP,有三个按钮输入,数字量 输入模块为6ES7 321-1BH02-0AA0,有4个电磁阀(2只为24V DC, 2只为220V AC),数字量输出模块为6ES7 322-1HH01-0AA0,3路 电流模拟量输入,模拟量输入模块为6ES7 331-7HF01-0AB0,3路 电压模拟量输出,模拟量输出模块为6ES7 332-5HD01-0AB0,请 设计接线图。
第二部分 S7-300/400的硬件与接线
该部分是学习S7-300/400的基础,无论从事设计编 程工作,还是维护/维修工作,必须要掌握该部分。
版权归无锡向晓汉所有,未经授权,任何网络传播均为非法!!!
一、西门子PLC家族产品介绍
SIMATIC 系列产品分为:通用逻辑模块(LOGO!)、S7-200 系列、S7-1200系列、S7-300系列、 S7-400系列和S7-1500系列 七个产品系列。S7-200是在德州仪器公司的小型PLC的基础上发 展而来,因此其指令系统、程序结构和编程软件和S7-300/400有 较大的区别。S7-1200系列是在2009年才推出的新型小型PLC,定 位于S7-200和S7-300产品之间。S7-300/400是由西门子的S5系列