基于PID控制的四分之一主动悬架仿真研究
基于PID控制的四分之一主动悬架仿真研究
摘要悬架是一个关键组成部分,汽车零部件,从而保证身体或车轮与主机系统之间的弹性接触,并可以传输负载,缓解冲击,振动和调整车身状态的衰减,直接影响到汽车的乘坐舒适性和操纵稳定性。
随着人们对现代汽车乘坐舒适性和行驶安全性的要求愈来愈高,设计一个综合性能良好的悬架,已成为现代汽车研究的一个侧重的课题。
传统的被动悬挂系统弹性构件刚度和阻尼减震元件是不变的,汽车行驶的路况,负载变化和其他因素的影响,因此,必须制定一个被动悬架不同的新的悬挂。
主动悬架是基于现代控制理论和电子技术的发展和开发,与车辆的运行状态,可以自适应地改变其刚度和阻尼参数,具有优良的阻尼性能和操纵稳定性,未来汽车吊框架的一个重要研究方向。
本论文先根据牛顿定理,运用车辆动力学理论,建立了被动悬架和二自由度1/4主动悬架系统的动力学模型。
并建立了路面输入分别为:白噪声信号、阶跃信号以及正弦信号的路面不平度数学模型。
同时,概述了悬架性能的三个评价指标,即车身加速度、悬架动挠度、轮胎动载荷。
并利用软件Matlab/Simulink构建出汽车悬架控制系统仿真模型图,包括路面输入模型,被动悬架模型,PID控制主动悬架模型。
运行仿真模型图即可实现不同路面输入信号的悬架系统的仿真。
最后,对悬架性能评价指标的仿真结果进行分析。
关键词:主动悬架;MATLAB;建模;PID控制;仿真AbstractSuspension is an component of the important assembly of the automobile, it guarantees to contact with a flexible between the wheels or axles and bearing system, and can transfer loads、relax impulsion、reduce vibration and regulate the body position of the vehicle in traffic, and have a direct impact on ride comfort and operate stability.With the increasing requirement of the vehicle's ride comfort and road security, the design of suspension with good performance has become more and more important. As a traditional passive suspension having a constant spring stiffness and damper coefficient which is not interfering with the road surface and the load change, so it is necessary to design a new style suspension. Active suspension and modern control theory and development of electronic technology, and its stiffness and damping coefficients can prosper, to adapt to different working environment, improve vehicle ride comfort and road holding. So it is significant to research and develop active suspension. Firstly, according to the Newton theorem, the paper use the vehicle dynamics theory, and set up the dynamics model of the passive suspension and the second freedom active suspension system based on 1/4 of the body. And translate the differential equations into a form of expression of the state equations. And establish the road roughness mathematical model of the road input signal for sine, step random and white noise signal, and achieve the simulation. At the same time, outlined the three evaluation index of the suspension performance, such as the body vertical acceleration, the relatively dynamic load of the wheel, the suspension dynamic deflection. And build the simulation model plans of the control system of the automobile suspension by the Matlab/Simulink software, including the importable model of the road, the passive suspension model, the active suspension model of the PID control. And run the simulation model map to achieve the simulation of the different input signal of the suspension control system. Finally, analysis the simulation results of the evaluation index of the suspension performance .Key words: Active suspension; MATLAB; Modeling; PID control; Simulation目录摘要.............................................................................................................. 错误!未定义书签。
车辆电液主动悬架PID最优控制研究
森
林
工Hale Waihona Puke 程 Vo 1 . 3 0 No .1
F 0RES T ENGI NEERI NG
J a n . ,2 0 1 4
车辆 电液 主 动 悬 架 P I D最 优 控 制 研 究
赵 强 ,范超 雄 ,孙 子 尧 ,陈 杰
( 东北 林 业 大 学 交 通 学 院 ,哈 尔滨 1 5 0 0 4 0 )
p e r f o r ma n c e a n d s t e e r i n g s t a b i l i t y ,t h e o u t e r l o o p a d o p t e d t h e o p t i m a l c o n t r o l( L Q G) i n o r d e r t o a t t e n u a t e t h e s y s t e m v i b r a t i o n s .
动 悬 架及 P I D控制主动悬架有明显改善。
关键 词 :主动 悬 架 ;1 / 4车 辆 模 型 ; 内外 环 ;仿 真 中 图 分 类 号 :S 7 7 6 文 献 标 识 码 :A 文 章 编 号 :1 0 0 1— 0 0 5 X ( 2 0 1 4 )0 1 —0 0 6 8— 0 5
Z h a o Q i a n g ,F a n C h a o x i o n g ,S u n Z i y a o ,C h e n J i e
( T r a f f i c C o l l e g e ,N o r t h e a s t F o r e s t r y U n i v e r s i t y ,H a r b i n 1 5 0 0 4 0 )
改进的模糊PID控制器对4自由度主动悬架振动控制的研究
公 路 交 通 科 技 Journal of Highway and Transportation Research and Development
Vol126 No12 Feb12009
文章编号 : 1002Ο0268 (2009) 02Ο0129Ο05
收稿日期 : 2008Ο06Ο03 基金项目 : 甘肃省高等学校研究生导师科研项目 (0511 - 03) 作者简介 : 陈翔 (1964 - ) , 男 , 甘肃静宁人 , 副教授 , 研究方向为车辆人工智能控制技术 1 (chenxiang - 64 @1261com)
1 30 公 路 交 通 科 技 第 26 卷
00000
k1f m1f
0
T
0
C=
,
00000
0
0
k1r m1r
-
k2f + k2r m2
-
cf + cr m2
-
k2f lf - k2r lr m2
0 D = - k2f lf - k2r lr
J
1 - cf lf - cr lr
J
0 - k2f lf2 + k2r l2r
以汽车车身的加速度 、垂直速度 、俯仰角加速度 、
前悬架和后悬架的变形为输出 ,令 Y = { ¨Z2 , Z2 ,θ¨, df , dr }T ,
则输出方程为 :
Y = DX + EU ,
(4)
式中 , m1f 、m1r 分别为前 、后轮轮胎质量 ; m2 为车身质
量 ; J 为车身转动惯量 ; k1f 、k1r 分别为前 、后轮胎等效
车辆的运动方式有 3 种 , 即沿地面垂直方向的跳 动 、沿汽车运动方向的俯仰和横向的侧倾 。从研究汽 车行驶平顺性的目的出发 , 如果不计汽车的水平振 动 , 只考虑对行驶平顺性影响最大的垂直振动和纵向 角振动 , 仅需考虑 1 个前轮和 1 个后轮 。为了方便研 究 , 同时又尽可能与车辆实际情况相适应 , 假设汽车 左右对称 , 且左右车轮的路面激励相同 ; 把车身视作 刚体 , 且质量为全车的一半 ; 前 、后轴和与其相连的 车轮分别简化为 2 个非簧载质量 , 并分别用 2 个线性
基于lqr(pid)控制策略主动悬架控制

1 概述
汽车,自它的降世开始,它总是吸引着人们的注意,许多人总是 为了它付出巨大的热情与兴趣。其中具有卓越性能的悬架系统在汽车 的整体性能中起着至关重要的作用。由于传统的被动悬架经过数十年 的研究已经达到极限,因此出现了各种可控制的悬架。 汽车悬架极大地影响了汽车的稳定性。因此,理论上,悬架的设 计应满足以下性能要求:务必确保汽车行驶良好。为此,汽车需要具 备相对较低的振动频率,乘车人员在车中所能承受的振动加速度应满 足国际标准 ISO2631-1-1997 要求的人体承受震动界限。它具有合适的 减震性能,与悬架的特性更好地匹配,确保车轮与车体在共振区的振 动幅度小,衰减振动速度快。汽车拥有非常好的乘坐舒适性。保证车 辆具有操稳性。当车轮持续跳动时,导销机构中的主销的定位参数变 化不应过大,应协调车轮运动和导向机构。没有摆振现象(主销周围 的车轮连续振动)。汽车转向应有一些不足转向特性。 汽车制动,确保汽车在加速过程时的稳定性,并降低“点头”、“仰 头”的可能性。它可以可靠地传递车身和车轮之间的各种反作用力和 力矩。确保车辆正常运转并减少轮胎磨损。 主动悬架系统的主要目的是优化悬架系统的性能和参数。然而, 在实际控制过程中,主动悬架在各种控制策略之后不能优化系统所有 参数的性能。经常会出现某一个或者某几个性能突然的有所提高,另 一些的性能就相对下降;所以最终对主动式悬挂控制规律利用遗传算 法的全局优化能力对参数进行优化,这样才能使悬挂系统的总体性能 达到最佳。
0
0
−q2
−
K
2 s
mb2
0 0
0
0
0
−q2
−
K
2 s
mb2
q1
+
q2
+
K
2 s
车辆主动悬架的模糊PID控制仿真
车辆主动悬架的模糊PID控制仿真景园;赵强;张娜【摘要】根据某车型悬架参数,建立了1/4车主动悬架Matlab/Simulink模型,选择簧载质量加速度、悬架动挠度、轮胎动载荷作为控制目标量,采用模糊PID复合控制技术,针对该悬架模糊控制模型的设计及仿真.仿真结果表明:与被动控制、PID 控制的悬架系统性能相比,该控制策略系统的簧载质量加速度和轮胎动载荷有了显著降低,有效改善了乘坐舒适性.【期刊名称】《机电产品开发与创新》【年(卷),期】2015(028)006【总页数】3页(P91-92,84)【关键词】主动悬架;模糊PID控制;仿真【作者】景园;赵强;张娜【作者单位】东北林业大学交通学院,黑龙江哈尔滨150040;东北林业大学交通学院,黑龙江哈尔滨150040;东北林业大学交通学院,黑龙江哈尔滨150040【正文语种】中文【中图分类】TP3不同于固定阻尼和刚度系数的车辆被动悬架,阻尼可调的主动悬架不仅能够适应车辆载荷、行驶速度以及路面的不平程度变化达到有效减震的目的,还可以调节刚度控制悬架侧倾。
从结构而言,主动悬架实际是一个主动力的发生器。
因此,控制策略的优劣对主动悬架控制效果有极大影响。
其中利用现代控制算法中应用比较广泛的研究有:陈志林利用了渐近稳定自适应控制[1];Yoon Y S等利用最优控制算法得到二次型性能指标[2];孙涛在电流变液磁流变半主动悬架上试验了模糊PID控制[3]等等。
其中PID控制具有原理简单、使用方便等优点应用最广泛,而车辆主动悬架控制系统为多自由度、多参数的非线性系统,常根据经验法不断调试确定PID的参数。
本文选用模糊PID控制,将模糊推理运用于PID参数的整定,以根据经验制定控制规则得出控制决策表,然后求出控制量的大小,不再需对控制对象精确建模,并通过Matlab/Simulink进行了建模及仿真分析。
1/4 车辆主动悬架理想模型如图1所示。
其模型根据牛顿定律满足以下动力方程:式中:m1—主动悬架非簧载质量(kg);m2—主动悬架簧载质量(kg);k1—轮胎径向刚度系数(N/m);k2—悬架刚度系数(N/m);c—减振器的阻尼系数(Ns/m);z2—车身簧载质量的垂直位移(m);z1—车身非簧载质量的垂直位移(m);z0—路面激励(m);fd—作动器的输出力(N)。
基于遗传算法的汽车主动悬架最优PID控制与仿真
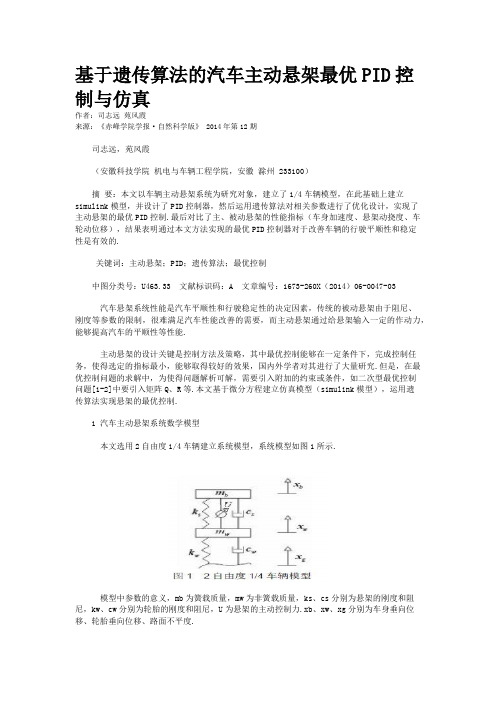
基于遗传算法的汽车主动悬架最优PID控制与仿真作者:司志远苑风霞来源:《赤峰学院学报·自然科学版》 2014年第12期司志远,苑风霞(安徽科技学院机电与车辆工程学院,安徽滁州 233100)摘要:本文以车辆主动悬架系统为研究对象,建立了1/4车辆模型,在此基础上建立simulink模型,并设计了PID控制器,然后运用遗传算法对相关参数进行了优化设计,实现了主动悬架的最优PID控制.最后对比了主、被动悬架的性能指标(车身加速度、悬架动挠度、车轮动位移),结果表明通过本文方法实现的最优PID控制器对于改善车辆的行驶平顺性和稳定性是有效的.关键词:主动悬架;PID;遗传算法;最优控制中图分类号:U463.33 文献标识码:A 文章编号:1673-260X(2014)06-0047-03汽车悬架系统性能是汽车平顺性和行驶稳定性的决定因素,传统的被动悬架由于阻尼、刚度等参数的限制,很难满足汽车性能改善的需要,而主动悬架通过给悬架输入一定的作动力,能够提高汽车的平顺性等性能.主动悬架的设计关键是控制方法及策略,其中最优控制能够在一定条件下,完成控制任务,使得选定的指标最小,能够取得较好的效果,国内外学者对其进行了大量研究.但是,在最优控制问题的求解中,为使得问题解析可解,需要引入附加的约束或条件,如二次型最优控制问题[1-2]中要引入矩阵Q、R等.本文基于微分方程建立仿真模型(simulink模型),运用遗传算法实现悬架的最优控制.1 汽车主动悬架系统数学模型本文选用2自由度1/4车辆建立系统模型,系统模型如图1所示.模型中参数的意义,mb为簧载质量,mw为非簧载质量,ks、cs分别为悬架的刚度和阻尼,kw、cw分别为轮胎的刚度和阻尼,U为悬架的主动控制力.xb、xw、xg分别为车身垂向位移、轮胎垂向位移、路面不平度.根据牛顿第二定律,建立2自由度1/4车辆模型的运动微分方程,如下所示.2 主动悬架系统simulink模型建立PID控制器[3]作为主动控制器,控制器模型如下其中e(t)为车身加速度相对于参考值的误差.在simulink中建立的模型如图3所示.参数:kp为比例系数、ki为积分系数、kd为微分系数、road为路面输入.3 最优PID控制问题的建立最优PID控制问题[4]是建立在PID控制的基础上,以其相应的参数为设计变量,以系统性能为目标的优化问题.在车辆悬架设计中,需要考虑的性能指标主要有三方面:(1)车身加速度—影响乘坐舒适性;(2)悬架动行程—影响车身姿态;(3)轮胎动负荷及位移—影响轮胎接地性能及汽车操纵稳定性能.因此在使用控制器对悬架进行控制时,必须同时兼顾三种性能,即在改善某一项性能的同时,不能损害其它性能.在上一节的基础上,选择kp(比例系数)、ki(积分系数)、kd(微分系数)为设计变量,即X=(kp,ki,kd),建立以车身加速度为最小的目标函数,即minf=RMS (4)根据相应平顺性国家标准[5],车辆乘员没有不舒服感觉的总加权加速度均方根值为0.315m/s2,因为1/4车辆模型研究的是车身加速度均方根值,相当于地板处的加速度,该处的轴加权系数为0.40,根据总加权加速度均方根值计算公式,计算得到目标函数的第一个约束条件.g1=RMS| |-0.7875m/s2≤0 (5)对于不同的车型,在吸收车身振动的前提下,悬架动行程都有一定的要求,从而得到目标函数的第二约束条件.g2=|xb-xw|-Ds≤0 (6)其中Ds为悬架动行程的最大值.为了限制轮胎动负荷,同时具有良好的接地性能,得到另外两个约束条件.g3=|xw-xg|-Dwg≤0 (7)g4=|xw|-Dw≤0 (8)其中Dwg、Dw分别为轮胎最大变形、最大位移.4 最优PID控制问题的求解对最优PID控制问题的求解,优化方法的选择至关重要.传统优化方法的缺点是要以所解问题的凸性作为得到全局最优解的前提条件,否则易得到局部最优解.遗传算法[6]主要借助生物进化中“适者生存”的规律,模拟生物进化过程中的遗传繁殖机制,对优化问题的解空间的每一个个体进行编码,然后对编码后的优化问题进行组合划分,通过迭代从中寻找最优解,其算法的适应性强,对问题本身要求低.而本文所研究的问题的凸性是很难判断的,因此选用遗传算法.遗传算法的计算过程主要包括个体编码、初始种群的形成、适应度计算、选择运算的复制、交叉运算及操作、变异运算.适应度函数的定义:计算过程中系统性能的参数计算是在simulink中进行的,为了处理方便,需要将式(6)—(8)的约束条件放到适应度函数里,构造带有惩罚项的适值函数.即其中当设计变量的值可行时,pi(X)=0,否则pi(X)取正值,对于不同的约束条件取值不同.5 路面输入模型[7]采用滤波白噪声作为路面输入模型,即其中xg为路面位移,m;G0为路面不平度系数,m3;f0为下限截止频率,Hz;u为车辆行驶速度,m/s;?棕(t)为均值为零的高斯白噪声.6 仿真计算及结果车辆模型参数:mb=2500kg,mw=320kg,ks= 80000N/m,kw=500000,cs=350N.s/m,cw=15020N.s/m,悬架动行程限制Ds=0.15m,轮胎动变形限制Dwg=0.05m,轮胎位移限制Dw=0.2m.优化参数:选择二进制编码,种群数为50,最大进化代数为200代,交叉概率为0.8,变异概率为0.05,由计算机在变量范围内随机生成初始种群.路面输入参数:G0=64×10-6m3/cycle,u=20m/s,f0=0.1Hz.路面输入曲线如图4所示.优化结果:kp=201.901,ki=2888.677,kd=1.369.优化前后车身加速度、悬架动挠度、车轮动变形及动位移的仿真结果曲线如图5、图6、图7和图8所示,各性能指标均方根值见表1.从图5-8及表1中可以看出,与被动悬架相比,主动悬架能够:(1)有效的降低车身加速度,其均方根值降低到乘员没有不舒服感觉所要求的值以下,提高了舒适性;(2)减少了悬架的动挠度,改善汽车的平顺性;(3)一定程度上减小轮胎变形,从而减小了轮胎动载荷,改善了汽车的操纵稳定性;(4)保持轮胎位移与被动悬架基本一致,从而保持轮胎的接地性能不变.7 结论建立了带有主动悬架的2自由度1/4车辆系统的simulink模型,运用遗传算法对参数进行优化设计,实现了悬架的最优PID控制,改善了系统的性能,并且与被动悬架对比了悬架的性能指标(车身加速度、悬架动挠度、车轮动位移),结果表明通过本文方法实现的最优PID控制器对改善车辆的行驶平顺性和稳定性是有效的.本文所采取的在simulink中建模(可以结合其它多体动力学软件),运用现代优化方法对系统参数进行优化的方法,具有方便、灵活、适应性强的特点.参考文献:〔1〕兰波,喻凡.车辆主动悬架LQG控制器的设计与仿真分析[J].农业机械学报,2004,35(1):13-17.〔2〕潘国建,刘献栋.汽车悬架参数优化的最优控制方法[J].农业机械学报,2005,36(11):21-24.〔3〕白金,韩俊伟.基于MATLAB/Simu1ink环境下的PID参数整定[J].哈尔滨商业大学学报(自然科学版),2007,23(6):673-676.〔4〕薛定宇.控制系统计算机辅助设计[M].北京:清华大学出版社,2005:260-281.〔5〕Saeed Badran, Ashraf Salah, Wael Abbas. Design of Optimal Linear Suspension for Quarter Car with Human Model using Genetic Algorithms[J]. The Research Bulletin of Jordan ACM, VolumeⅡ:42-51.〔6〕喻凡.车辆动力学及其控制[M].北京:机械工业出版社,2009.106-112.。
基于PID控制的12车四自由度主动悬架仿真研究
Science and Technology &Innovation ┃科技与创新·69·2022年第01期文章编号:2095-6835(2022)01-0069-03基于PID 控制的1/2车四自由度主动悬架仿真研究邱润其,杨雨润(武汉理工大学国际教育学院,湖北武汉430070)摘要:以1/2车辆模型作为控制对象,建立了1/2车四自由度车辆主动悬架动力学模型,运用PID 控制方法分别对前轮和后轮建立控制回路,并在MATLAB/Simulink 中构造悬架。
此仿真模型,以白噪音法建立的C 级路面随机激励信号当作路面输入,分别将前、后车身的垂向加速度当作控制量。
试验结果显示,与传统的被动悬架相比,PID 控制的主动悬架能更加有效地降低整个车身的垂向加速度以及前后车身纵向加速度,并在一定程度上抑制车身的俯仰角加速度。
关键词:1/2车辆模型;主动悬架;PID 控制;仿真分析中图分类号:U461文献标志码:ADOI :10.15913/ki.kjycx.2022.01.022如今,随着工业的迅猛发展,使人们对美好生活的需求不断增大,在汽车上亦是如此,除了对性能要求,乘车的舒适程度和操纵出行的稳定性也成为了人们在选购汽车时首要考虑的因素,而舒适性和稳定性,恰恰又与汽车悬架的性能休戚相关。
在车辆行驶过程中,汽车的悬架会主动吸收路面带来的震动,从而达到降低震动频率的目的,来缓解坑洼不平的路面给车身带来的冲击,以提升乘客的舒适性和车主操作上的稳定性。
汽车传统的被动悬架由减震器和弹簧两部分构成,一旦确定了减震器的阻尼系数以及弹簧的刚度,便难根据工况动态调整,无法在不同的路面情况下作出不同的反应,所以也称为被动悬架。
然而,汽车在行驶过程中,所遭遇的路面状况是不同的,在不同的情况下,汽车所需要的减震器和弹簧的参数也就不同。
所以,要想贴合汽车的实际行驶情况,悬架也要作出相应的调整,显然,被动悬架难以完成这一要求。
主动悬架pid控制策略研究资料
汽车悬架的半主动控制系统MATLAB/SIMULNK仿真S0705234 沙小伟摘要:分析当前轿车的悬架系统,对之进行简化。
首先建立其1/4模型,利用仿真软件MATLAB里面的附件Simulink对悬架的简化模型进行仿真,考察其加速度,输出位移等特性。
在此基础上进一步建立悬架系统的1/2模型,继续考察车身的加速度,输出位移,转角等系列特性。
Simulink软件在整个的仿真过程中显示出强大的能力。
关键词:汽车悬架,半主动控制,仿真Abstract: Analyze the suspension system of modern car, and then simplify it. First the model was analyzed with 2 degrees of freedom by the software simulink. Based on this, and then building 12 degrees of the suspension system. Inspect the acceleration and rotation angle and some other characters. In the whole process, the software simulink displayed powerful capacity.Keywords: car suspension,semi – active control, simulation引言汽车悬架系统简介。
悬架系统是车辆的一个重要组成部分。
车辆悬架性能是影响车辆行驶平顺性、操作稳定性和行驶速度的重要因素。
传统的被动悬架一般由具有固定参数的弹性元件和阻尼元件组成,被设计为适应某一种路面,限制了车辆性能的进一步提高。
20世纪70年代以来工业发达国家就已经开始研究基于振动主动控制的主动、半主动悬架系统。
近年来随着电子技术、测试技术、机械动力等学科的快速发展,使车辆悬架系统由传统被动隔振发展到振动主动控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于PID控制的四分之一主动悬架仿真研究四分之一主动悬架是一种通过调节悬挂系统的阻尼和刚度来改变车辆
悬挂特性的技术。
PID控制是一种经典的控制算法,可以用于调节系统的
输出,以实现期望的性能。
本文将结合四分之一主动悬架和PID控制,进
行仿真研究。
首先,我们需要建立四分之一主动悬架的数学模型。
四分之一主动悬
架由主动悬挂器、汽车底盘质量、轮胎、地面以及传感器等组成。
根据牛
顿力学原理和前馈力控制原理,可以得到四分之一主动悬架的运动方程。
其中,包括车辆质量、悬挂器质量、阻尼以及刚度等参数。
接下来,我们需要设计PID控制器来控制悬挂系统。
PID控制器由比例、积分和微分三个部分组成。
比例部分用于响应系统的当前误差,积分
部分用于消除系统的积累误差,微分部分用于预测系统的未来误差。
通过
调整PID控制器的参数,可以实现对悬挂系统的有效控制。
在进行仿真研究时,我们可以使用MATLAB/Simulink等工具来建立悬
挂系统的数学模型,并实现PID控制算法。
首先,我们需要设置系统的输
入和输出信号,并根据车辆运动学关系来计算系统的输出信号。
然后,我
们可以使用PID控制器来对输出信号进行调节,并计算PID控制器的输出。
在仿真过程中,我们可以通过改变PID控制器的参数来观察系统的响应。
比如,增大比例项可以加快系统的响应速度,增大积分项可以减小系
统的稳态误差,增大微分项可以提高系统的稳定性。
通过不断调整PID控
制器的参数,我们可以找到最优的PID参数,以实现对悬挂系统的最佳控制。
最后,我们可以通过仿真结果来评估PID控制算法在四分之一主动悬架上的性能。
比如,我们可以通过比较不同PID参数下的系统响应曲线来评估控制效果,以及通过计算系统的稳态误差来评估控制精度。
同时,我们也可以通过计算系统的能耗来评估控制器的效率。
综上所述,基于PID控制的四分之一主动悬架仿真研究可以通过建立悬挂系统的数学模型和设计PID控制器来实现。
通过仿真研究,我们可以评估不同PID参数下的控制效果,并寻找到最优的PID参数,以实现对悬挂系统的最佳控制。