四自由度机器人
四自由度绘图机器人的控制系统设计
四自由度绘图机器人的控制系统设计0引言在丁业生产过程中,为了对加工零件的型号、尺寸等作以标识,需要专用绘图设备对其进行标记。
本文针对这一生产需要,模拟工业现场环境,设计了可完成绘图、划线、切割等功能于一体的机器——简称绘图机器人。
传感器技术、图像采集与识别技术、最优化技术以及路径规划算法等理论的发展,为绘图机器人的实现提供了技术与理论依据。
曾在2006年中国围际工业博览会上,由ABB公司制造的绘图机器人“神笔马良”就吸引了很多人的关注。
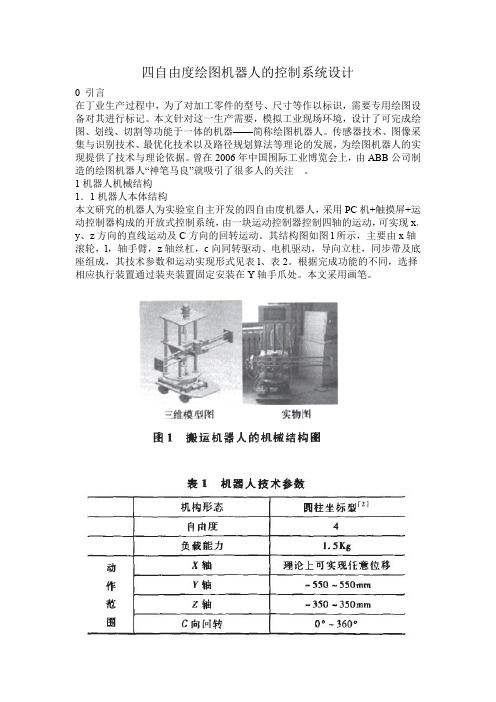
1机器人机械结构1.1机器人本体结构本文研究的机器人为实验室自主开发的四自由度机器人,采用PC机+触摸屏+运动控制器构成的开放式控制系统,由一块运动控制器控制四轴的运动,可实现x、y、z方向的直线运动及C方向的回转运动。
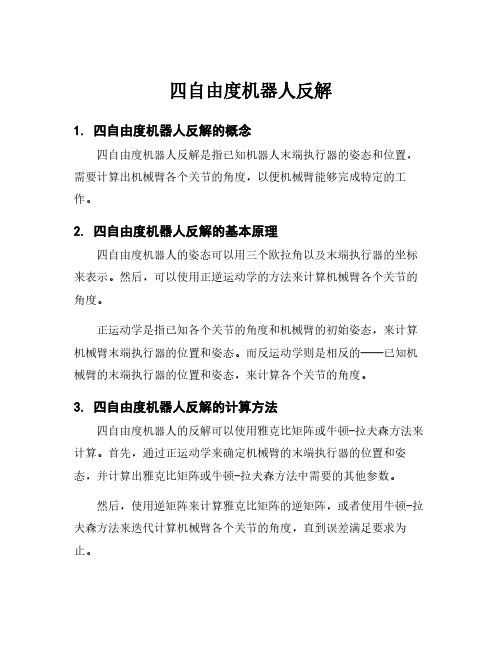
其结构图如图l所示,主要由x轴滚轮,l,轴手臂,z轴丝杠,c向同转驱动、电机驱动,导向立柱,同步带及底座组成,其技术参数和运动实现形式见表l、表2。
根据完成功能的不同,选择相应执行装置通过装夹装置固定安装在Y轴手爪处。
本文采用画笔。
1.2机器人传感器模块传感器类似于人的五官,是机器人感知外部环境的直接手段。
本设计采用的传感器包括:(1)接近开关:4个接近开关均选用AOTORO的FRl8-8DN,其有效测量距离为8ram,分别安装在l,轴手爪和Z轴导向立柱处,用于y轴左右、z轴上下限位。
当金属检测体靠近开关的感应区域,开关迅速发出指令反馈给运动控制器,运动控制器接到反馈信号,发出控制信号,控制电机动作同时产生报警信号¨1。
(2)超声波传感器:用于X轴行动过程中的避障,有效测距分为3个量程,分别是9m、3m和lm。
当机器人在行驶中检测到前方有障碍物时,立即停止前进,原地等待并发出报警信号,直至障碍物消失再继续前进。
(3)角度传感器:在绘制某些图形的过程中,需要画板与画笔之间有一角度,该传感器就是用于C向回转中角度的信号检测。
2个角度传感器均采用国产的TDR.BZ。
四自由度机器人反解
四自由度机器人反解
1.四自由度机器人反解的概念
四自由度机器人反解是指已知机器人末端执行器的姿态和位置,需要计算出机械臂各个关节的角度,以便机械臂能够完成特定的工作。
2.四自由度机器人反解的基本原理
四自由度机器人的姿态可以用三个欧拉角以及末端执行器的坐标来表示。
然后,可以使用正逆运动学的方法来计算机械臂各个关节的角度。
正运动学是指已知各个关节的角度和机械臂的初始姿态,来计算机械臂末端执行器的位置和姿态。
而反运动学则是相反的——已知机械臂的末端执行器的位置和姿态,来计算各个关节的角度。
3.四自由度机器人反解的计算方法
四自由度机器人的反解可以使用雅克比矩阵或牛顿-拉夫森方法来计算。
首先,通过正运动学来确定机械臂的末端执行器的位置和姿态,并计算出雅克比矩阵或牛顿-拉夫森方法中需要的其他参数。
然后,使用逆矩阵来计算雅克比矩阵的逆矩阵,或者使用牛顿-拉夫森方法来迭代计算机械臂各个关节的角度,直到误差满足要求为止。
4.四自由度机器人反解的应用
四自由度机器人反解在许多工业应用中被广泛应用,如在制造业中的精密加工、自动化生产线中的零件组装、以及医疗设备中的手术操作等领域,都需要机器人反解来协助完成工作。
在未来,随着人工智能和机器人技术的不断发展,四自由度机器人反解的应用将会更加广泛,并且会在许多领域中发挥越来越重要的作用。
《精心整理》四自由度机器人毕业设计论文要点

四自由度工业机器人毕业设计摘要近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获得应用。
我国在机器人的研究和应用方面与工业化国家相比还有一定的差距,因此研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是有现实意义的。
本文简要介绍了工业机器人的概念,机器人的组成和分类,机器人的自由度和坐标形式,气动技术的特点。
对机器人进行总体方案设计,确定了机器人的坐标形式和自由度,确定了机器人的技术参数。
同时,设计了机器人的夹持式手部结构,设计了机器人的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。
设计了机器人的手臂结构。
设计出了机器人的气动系统,绘制了机器人气压系统工作原理图,对气压系统工作原理图的参数化绘制进行了研究,大大提高了绘图效率和图纸质量。
关键词:工业机器人,机器人,气动,单片机控制ABSTRACTIn the past twenty years, robotic technology is developing very fast, all sorts of use robots in various fields can be used widely. Our country in the research and application of robots and industrial countries, there is still a gap compared, therefore, the research and design various USES robots especially industrial robots, promote the use of robots is a realistic significance.This paper briefly introduces the concept of industrial robot, robot, robot composition and classification of freedom and coordinates, the characteristics of pneumatic technology. The general scheme design of robot, robot was determined, and freedom of coordinates the technical parameters of robot was determined. Meanwhile, the design of the robot hand gripping type of the robot structure, design wrist structure, calculated the wrist rotation for driving moment and rotary cylinder driving moment. Design a robot arm structure.Designed a robot pneumatic system, painted robots working principle diagram, pneumatic system of pneumatic system working principle diagram parametric drawing was studied, and greatly improve the efficiency of drawing and drawings quality.Keywords: industrial robot, pneumatic, SCM control第一章绪论随着计算机技术的不断向智能化方向发展,机器人应用领域的不断扩展和深化,工业机器人已成为一种高新技术产业,为工业自动化发挥了巨大作用,将对未来生产和社会发展起越来越重要的作用。
四自由度机器人设计及分析
表 4-2 减速器弯矩刚性和轴端尺寸
弯矩刚性 Nm/arc.min.※3
117 372 931 1176 1176 1470 2940 4900 7448
a 17.6 20.1 29.6 33.4 37.4 32.2 47.8 56.4 69.0
尺寸(mm)
b 91.6 113.3 143.7 166.0 166.0 176.6 210.9 251.4 292.7
减速器 RV-20E 满足所有要求规格,因此选定 RV-80E-10。
4
0
3
40 N em 60
tem
8274次
外部负载条件 W1=500 N L1=0.5m W2=2000N L3=0.5m 求出力矩刚度 求出输出轴偏角是否符合要求的规定值
W11 W2 3 M t 103
0.58
(4-9) (4-10)
型式
RV-6E RV-20E RV-40E RV-80E※1 RV-80E※2 RV-110E RV-160E RV-320E RV-450E
50KG 四自由度机器人设计报告
1.1.1 电机选择
码垛机器人腰部由于负重较大,所以要求旋转的速度不宜过快,因此要选择中速或
者低速电机。
设机器人腰部绕其中心轴的转动惯量为 J,根据机器人的静力学分析,取大臂小臂
极限长度 L,可得其转动惯量为:
J ML2 3
(4-1)
其中 M 是腰部所要承受的重量,为 200Kg,L 为 1m,通过计算得其转动惯量为
K
N0 Nm
T0 Tm
3.
41862h 20000h
Tem=3000 Nem=20
四自由度的工业机器人设计说明书

1 绪论1.1四自由度的工业机器人的概念四自由度的工业机器人是一个在三维空间中具有较多自由度,并能实现较多拟人动作和功能的机器,而工业四自由度的工业机器人则是在工业生产上应用的四自由度的工业机器人。
美国四自由度的工业机器人工业协会提出的工业四自由度的工业机器人定义为:“四自由度的工业机器人是一种可重复编程和多功能的,用来搬运材料、零件、工具的操作机”。
英国和日本四自由度的工业机器人协会也采用了类似的定义。
我国的国家标准GB/T12643-90将工业四自由度的工业机器人定义为:“四自由度的工业机器人是一种能自动定位控制、可重复编程的、多功能的、多自由度的操作机。
能搬运材料、零件或操持工具,用以完成各种作业”。
而将操作机定义为:“具有和人手臂相似的动作功能,可在空间抓放物体或进行其它操作的机械装置”。
四自由度的工业机器人系统一般由操作机、驱动单元、控制装置和为使四自由度的工业机器人进行作业而要求的外部设备组成。
1.1.1操作机操作机是四自由度的工业机器人完成作业的实体,它具有和人手臂相似的动作功能。
通常由下列部分组成:a.末端执行器又称手部,是四自由度的工业机器人直接执行工作的装置,并可设置夹持器、工具、传感器等,是工业四自由度的工业机器人直接与工作对象接触以完成作业的机构。
b. 手腕是支承和调整末端执行器姿态的部件,主要用来确定和改变末端执行器的方位和扩大手臂的动作范围,一般有2~3个回转自由度以调整末端执行器的姿态。
有些专用四自由度的工业机器人可以没有手腕而直接将末端执行器安装在手臂的端部。
c. 手臂它由四自由度的工业机器人的动力关节和连接杆件等构成,是用于支承和调整手腕和末端执行器位置的部件。
手臂有时包括肘关节和肩关节,即手臂与手臂间。
手臂与机座间用关节连接,因而扩大了末端执行器姿态的变化范围和运动范围。
d. 机座有时称为立柱,是工业四自由度的工业机器人机构中相对固定并承受相应的力的基础部件。
四自由度机械手(上半部分)

四自由度机械手(上半部分)作为现代工业制造领域中,机器人与自动化领域的核心产品之一,机械手在制造业中扮演着不可替代的角色。
而四自由度机械手便是机械手领域中的重要成员,本文将对其进行详细介绍。
一、四自由度机械手的概念及基本结构四自由度机械手是指由四个自由度的运动副组成的机械手。
其自由度主要分为旋转自由度和直线自由度两种。
旋转自由度可分为绕x、y、z三个轴向旋转自由度,直线自由度可分为x、y、z三个轴向作直线运动的自由度。
四自由度机械手的基本结构由支撑结构、底座、轴承系统、导轨系统、执行器等组成。
其中,支撑结构设在机械手的底部,通过轴承系统与机械手执行器连接,控制机械手的运动方向和范围。
二、四自由度机械手的优缺点四自由度机械手相对于其他机械手类型具有如下优点:1、机械手可根据特定要求进行定制,能够实现弯曲、旋转、伸缩等多种动作,可以适用于较多的工程需求;2、在承载重量较小的情况下,四自由度机械手的成本较低;3、四自由度机械手具有很高的操作精度,可适用于许多需要高精度的操作领域。
但四自由度机械手也有以下缺点:1、四自由度机械手的承载能力较低,仅适用于承载较小的物品;2、机械手无法实现多种操作综合编程。
三、四自由度机械手的应用四自由度机械手在工业制造和自动化生产中具有广泛的应用领域。
其适用于自动化加工、搬运、堆垛、组装、分拣等方面。
在以下几个方面有具体的应用:1、电子工业:四自由度机械手可用于电子元器件的组装、焊接、拆卸等操作。
2、汽车工业:在汽车制造中,四自由度机械手主要用于焊接、装配、喷漆等自动化生产环节。
3、食品加工业:四自由度机械手可用于食品加工中,如包装、封箱等生产步骤。
4、医疗产业:机械手的高精度使其非常适合在医疗领域中用于外科手术等领域中。
总结:四自由度机械手作为机械手领域的成员之一,可用于电子制造、汽车工业、食品加工和医疗行业等领域中的生产流程,并能根据不同的生产需求进行定制和编程。
同时,由于其相对较低的成本和高精度操作的特性,四自由度机械手在现代制造领域中具有重要的应用价值。
机械设计四自由度机器人
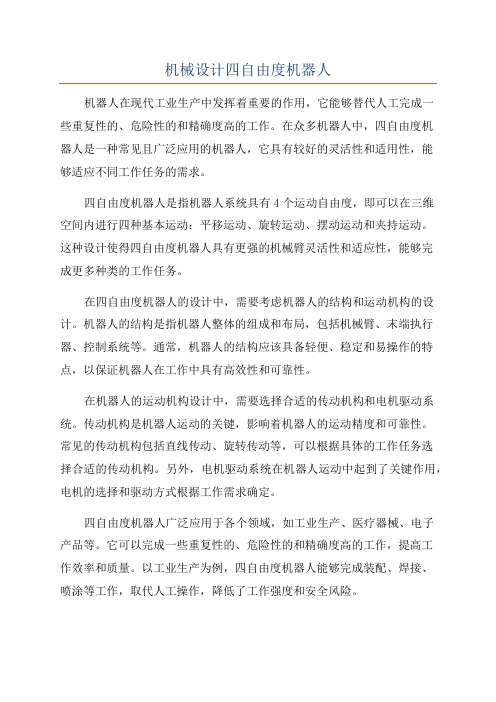
机械设计四自由度机器人机器人在现代工业生产中发挥着重要的作用,它能够替代人工完成一些重复性的、危险性的和精确度高的工作。
在众多机器人中,四自由度机器人是一种常见且广泛应用的机器人,它具有较好的灵活性和适用性,能够适应不同工作任务的需求。
四自由度机器人是指机器人系统具有4个运动自由度,即可以在三维空间内进行四种基本运动:平移运动、旋转运动、摆动运动和夹持运动。
这种设计使得四自由度机器人具有更强的机械臂灵活性和适应性,能够完成更多种类的工作任务。
在四自由度机器人的设计中,需要考虑机器人的结构和运动机构的设计。
机器人的结构是指机器人整体的组成和布局,包括机械臂、末端执行器、控制系统等。
通常,机器人的结构应该具备轻便、稳定和易操作的特点,以保证机器人在工作中具有高效性和可靠性。
在机器人的运动机构设计中,需要选择合适的传动机构和电机驱动系统。
传动机构是机器人运动的关键,影响着机器人的运动精度和可靠性。
常见的传动机构包括直线传动、旋转传动等,可以根据具体的工作任务选择合适的传动机构。
另外,电机驱动系统在机器人运动中起到了关键作用,电机的选择和驱动方式根据工作需求确定。
四自由度机器人广泛应用于各个领域,如工业生产、医疗器械、电子产品等。
它可以完成一些重复性的、危险性的和精确度高的工作,提高工作效率和质量。
以工业生产为例,四自由度机器人能够完成装配、焊接、喷涂等工作,取代人工操作,降低了工作强度和安全风险。
总之,四自由度机器人是一种常见且广泛应用的机器人,它具备较好的灵活性和适应性,能够适应不同工作任务的需求。
在机器人的设计中,需要考虑机器人的结构和运动机构的设计,以保证机器人在工作中具有高效性和可靠性。
四自由度机器人在各个领域发挥着重要的作用,提高了工作效率和质量,推动了现代工业的发展。
毕业设计四自由度机器人

毕业设计四自由度机器人毕业设计题目:四自由度机器人的设计与控制一、引言四自由度机器人是一种常见的工业机器人,其基础结构包括底座、臂部、腕部和末端执行器。
在工业生产线上,四自由度机器人广泛应用于装配、焊接、喷涂等需要精确操作的工艺环节。
本篇毕业设计论文将对四自由度机器人的设计与控制进行研究和分析。
二、机器人的设计1.结构设计:为了实现机器人的灵活和精确操作,我们将设计一个四自由度机器人。
该机器人的结构由底座、臂部、腕部和末端执行器组成。
底座提供了机器人的稳定性和机动性,臂部负责机器人进行大范围的空间运动,腕部通过关节连接臂部和末端执行器,末端执行器完成具体的操作任务。
2.运动学设计:机器人的运动学设计是机器人设计中的重要一环。
我们将采用世界坐标系和本体坐标系的方法,建立逆运动学模型和正运动学模型,以实现机器人的运动控制。
具体设计中,我们将采用符号法推导机器人的运动学方程,通过求解并进行数值模拟验证,实现机器人的精确运动。
三、机器人的控制1.控制系统设计:机器人的控制系统是实现机器人精确操作的核心。
我们将采用开环控制和闭环控制相结合的方法,设计机器人的控制系统。
开环控制系统通过预设关节角度实现机器人的运动,闭环控制系统通过传感器反馈实时监控机器人的运动,并进行误差修正,实现机器人的精确操作。
2.控制算法设计:我们将采用PID控制算法对机器人进行控制。
PID控制算法具有稳定性好、计算简单等优点,适用于工业机器人的控制。
我们将根据机器人的运动学特性,根据机器人的误差信号设计合适的PID参数,以优化机器人的运动轨迹和操作精度。
3.编程与仿真设计:为了验证机器人的设计和控制系统的有效性,我们将使用MATLAB和Simulink进行编程和仿真设计。
通过编写机器人运动学模型和控制算法的代码,并在Simulink中搭建机器人的控制系统,实现机器人精确操作的仿真。
四、总结本篇毕业设计论文对四自由度机器人的设计与控制进行了研究和分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四自由度机器人
典型四自由度机器人
概述
系统的所有特点,既具有操作机(机械本体)、控制器、伺服驱动系统和检
测传感装置,又具有速度快、精度高、柔性好等特点。
固高科技的GRB系列工业机器人是专门为大中专院校和职业高等技校
机电一体化、制造自动化和自动控制等相关专业提供的一个完全开放、创新
性实验平台,它适合机械制造及其自动化、机械电子工程、机械设计与理论、
数控技术、机器人学、自动控制等相关机电控制类基础实验课程教学。
固高科技的GRB系列工业机器人种类涵盖了两自由度平面机械手
(RR)、三自由度机械手(RRR或RRP)和四自由度直角坐标机械手(PPPR)
和SCARA机器人(RRPR)等多个产品型号。
除进行教学和培训外,GRB系列
工业机器人还可用于细小工件的搬运,电子元件的装配和点胶等工业作业。
工业化设计与制造
z旋转关节采用交流伺服电机驱动,谐波减速器传动;
z平移关节采用交流伺服电机驱动,滚珠丝杠传动;
z各部件按照工业标准设计和制造。
开放式控制实验平台
z基于PC和DSP运动控制器的开放式硬件平台;
z通用智能运动控制开发平台,采用C++面向对象的设计方法;
z TCP/IP协议远程网络编程、仿真、控制功能;
z配备集成语言编程系统和图形示教软件,便于机器人的编程操作和应用培训;
z配套内容详尽的使用手册和实验指导书,通过实例演示,引导用户学习如何基于运动控
制器开发各种应用软件系统
基础实验内容
z机器人机械、电气、控制、软件结构的认知;
z机器人操作实习;
z机器人运动学问题研究;
z机器人动力学问题研究
创新性和挑战性
z机器人力矩控制方式研究;
z基于智能控制平台开发各种应用软件系统;
z利用平台提供的视觉接口,挑战视觉伺服系统的研究和开发;
z挑战机器人远程监控和多机器人协调工作等研究项目
软件界面(C++)
视觉机器人 系统特点
z 图像处理装置全部采用国外高端工业摄像头和图像采集卡;
z 图像采集卡提供接口函数库,适用于各种开发环境;
z 基于PC 和DSP 运动控制器的开放式硬件平台,提供接口库;
z 配套内容详尽的使用手册和实验指导书,通过实例演示,引导用户学习如何基于运动控
制器开发各种应用软件系统。
参考实验内容
z 机器人机械、电气、控制、软件结构的认知;
z 运动学分析实验
z 精确定位实验
z 轨迹规划实验
z 图形示教实验
z 远程控制仿真与实验
z 图象处理实验
VC 控制软件及其界面
模块化机械平台
四自由度SCARA 机器人技术参数
项 目 指 标
负载能力 提升5Kg / 旋转 2Kg
关节1 800000/r
关节2 800000/r
关节3 2500pulse/mm
增量式编码器交流伺服电机 运动精度(脉冲当量/转) 关节4 240000/r
关节1 20971520 pulse /r
关节2 20971520 pulse /r
关节3 262144 pulse/mm
绝对编码器交流伺服电机 运动精度(脉冲当量/转) 关节4 6291456 pulse /r
XY 轴合成重复定位精度 ±0.05mm
关节3重复定位精度 ±0.02mm
关节4旋转重复定位精度 ±0.05゜
自由度数 4
关节1 ±120゜
增量式编码器电机 ±100゜
关节2 绝对式编码器电机 ±130゜
关节3 0~150mm
每轴最大运动范围 关节4 0~360゜
关节1 6.54 rad/S
关节2 6.54 rad/S
关节3 300 mm/S
每轴最大运动速度 关节4 18.84 rad/S
XY 轴合成最大动运速度 3.3m/s
最大展开半径 400mm
高 度 706mm
本体重量 ≤30Kg
关节1 (长度) 250mm
关节2 (长度) 150mm
几何尺寸 关节3 (行程) 150mm
安装方式 水平安装
安装要求 安装环境 温度:0~45°C
湿度:20~80%RH (不能结露)
震动:0.5G 以下
避免接触易燃腐蚀性液体或气体,远离电
气噪声源
机器人视觉装置系统参数(可选)
项目指标备注
图像采集卡¾支持采集NTSC、PAL、RS170和CCIR标准视频源
¾双视频解码器架构适用于超快的通道切换
¾可连接和切换16个 CVBS通道,8个Y/C或混合输入通道
¾16路 TTL I/O辅助接口和 RS-485串行接口
¾看门狗定时器用于全面监视系统的完整性
¾支持32位33/66 MHz PCI总线主模式
¾配套软件开发包,包括Matrox Imaging Library (MIL)/ActiveMIL,、MIL-Lite/ActiveMIL-Lite
¾支持Microsoft Windows 2000和WindowsXP操作系统
原装进口
CCD工业摄像头¾高分辨率
¾VBS and Y/C 输出
¾电子线路功能
¾单击白平衡
¾预装数字信号处理器DSP
¾TV系统NTSC/PAL
¾图像传感器 Interline
CCD
¾有效像素752*582
¾像素尺寸 8.6*8.3
¾扫描线 625Lines
¾分辨率 470TV lines(水平) 460TV lines(垂直)
¾信噪比 46dB
¾电源DC12V + - 10%
¾镜头接口 C
¾尺寸31(W)×29(H)×80(D)mm
原装进口
定购指南
产品代码产品名称产品描述
GRB3014 四自由度SCARA机械手
ARB-MB-2004-II 四自由度机械臂本体
GT-400-SG-PCI-EDU GT-400-SG型运动控制器
ARB-EB-4 四轴电控模块
ARB-RM-2 电磁手爪
ARB-WP 演示部件组件
SRB-VC-4 多自由度机器人控制软件(含源代码)
GRB3024 带支架的四自由度机械臂
ARB-MB-2004-II 四自由度机械臂本体
ARB-BS-1 铝型材支架
GT-400-SG-PCI-EDU GT-400-SG型运动控制器
ARB-RM-2 电磁手爪
ARB-WP 演示部件组件
SRB-VC-4 多自由度机器人控制软件(含源代码)
GRB3034 带单目视觉装置SCARA机械手
ARB-MB-2004-II 四自由度机械臂本体
ARB-BS-1 铝型材支架
GT-400-SG-PCI-EDU GT-400-SG型运动控制器
ARB-RM-2 电磁手爪
ARB-WP 演示部件组件
ARB-VM-1 机器人单目视觉模块
SRB-VC-4-1VS 单目视觉机器人控制软件(含源代码)
GRB3044 带双目视觉装置SCARA机械手
ARB-MB-2004-II 四自由度机械臂本体
ARB-BS-1 铝型材支架
GT-400-SG-PCI-EDU GT-400-SG型运动控制器
ARB-VM-2 机器人双目视觉模块
ARB-RM-2 电磁手爪
ARB-WP 演示部件组件
SRB-VC-4-1VS 单目视觉机器人控制软件(含源代码)
SRB-VC-4-2VS 双目视觉机器人演示软件(含源代码)
固高科技(香港)有限公司
香港九龙清水湾香港科技大学新翼楼4605室 电话:+852-********
传真:+852-********
电邮: SALES@
网址:
固高科技(深圳)有限公司
深圳市南山区高新技术产业园南区 深港产学研基地大楼西座二楼W211室
邮编:518057
电话:86-755-26970824
传真:86-755-26970846
电邮: GOOGOL@
网址: 。