水箱液位控制系统的设计及实物调试
水箱液位自动控制系统设计
第一章水箱液位自动控制系统原理液位自动控制是通过控制投料阀来控制液位的高低,当传感器检测到液位设定值时,阀门关闭,防止物料溢出;当检测液位低于设定值时,阀门打开,使液位上升,从而达到控制液位的目的。
在制浆造纸工厂常见有两种方式的液位控制:常压容器和压力容器的液位控制,例如浆池和蒸汽闪蒸罐。
液位自动控制系统由液位变送器(或差压变送器)、电动执行机构和液位自动控制器构成。
根据用户需要也可采用控制泵启停或改变电机频率方式来进行液位控制。
结构简单,安装方便,操作简便直观,可以长期连续稳定在无人监控状态下运行。
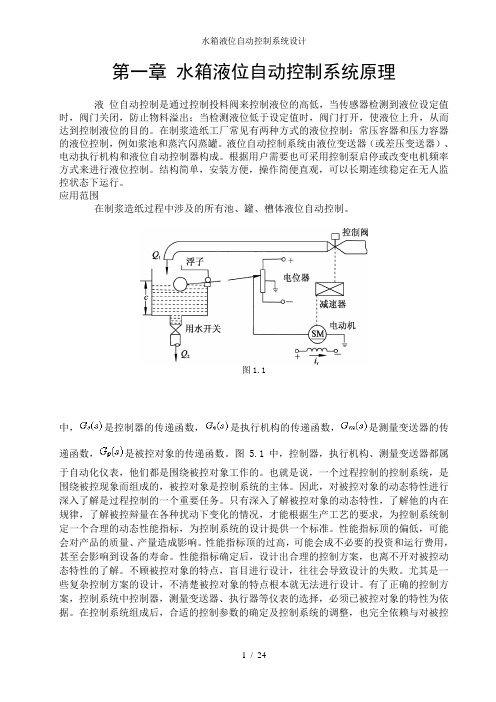
应用范围在制浆造纸过程中涉及的所有池、罐、槽体液位自动控制。
图1.1中,是控制器的传递函数,是执行机构的传递函数,是测量变送器的传递函数,是被控对象的传递函数。
图5.1中,控制器,执行机构、测量变送器都属于自动化仪表,他们都是围绕被控对象工作的。
也就是说,一个过程控制的控制系统,是围绕被控现象而组成的,被控对象是控制系统的主体。
因此,对被控对象的动态特性进行深入了解是过程控制的一个重要任务。
只有深入了解被控对象的动态特性,了解他的内在规律,了解被控辩量在各种扰动下变化的情况,才能根据生产工艺的要求,为控制系统制定一个合理的动态性能指标,为控制系统的设计提供一个标准。
性能指标顶的偏低,可能会对产品的质量、产量造成影响。
性能指标顶的过高,可能会成不必要的投资和运行费用,甚至会影响到设备的寿命。
性能指标确定后,设计出合理的控制方案,也离不开对被控动态特性的了解。
不顾被控对象的特点,盲目进行设计,往往会导致设计的失败。
尤其是一些复杂控制方案的设计,不清楚被控对象的特点根本就无法进行设计。
有了正确的控制方案,控制系统中控制器,测量变送器、执行器等仪表的选择,必须已被控对象的特性为依据。
在控制系统组成后,合适的控制参数的确定及控制系统的调整,也完全依赖与对被控对象动态特性的了解。
由此可见,在控制工程中,了解被控制的对象是必须首先做好的一项工作。
水箱液位PID调节控制系统及实物仿真调试

水箱液位PID调节控制系统及实物仿真调试【摘要】在人们生活以及工业生产等诸多领域经常涉及到液位和流量的控制问题,例如居民生活用水的供应,饮料、食品加工,溶液过滤,化工生产等多种行业的生产加工过程,通常需要使用蓄液池,蓄液池中的液位需要维持合适的高度,既不能太满溢出造成浪费,也不能过少而无法满足需求。
因此液面高度是工业控制过程中一个重要的参数,特别是在动态的状态下,采用适合的方法对液位进行检测、控制,能收到很好的效果。
PID控制(比例、积分和微分控制)是目前采用最多的控制方法。
【关键词】水箱液位;PID控制;液位控制;Matlab仿真一.引言在人们生活以及工业生产等诸多领域经常涉及到液位和流量的控制问题,例如居民生活用水的供应,饮料、食品加工,溶液过滤,化工生产等多种行业的生产加工过程,通常需要使用蓄液池,蓄液池中的液位需要维持合适的高度,既不能太满溢出造成浪费,也不能过少而无法满足需求。
因此液面高度是工业控制过程中一个重要的参数,特别是在动态的状态下,采用适合的方法对液位进行检测、控制,能收到很好的效果。
本论文利用PID算法在matlab中进行仿真并讲解实物搭接效果,具体如下:1、利用指导书中推导的模型和实际的参数,建立水箱液位控制系统的数学模型,并进行线性化;2、构成水箱液位闭环无静差系统,并测其动态性能指标和提出改善系统动态性能的方法,使得系统动态性能指标满足σ%≤10%0.5秒,静态误差小于2%;3、通过在matlab编程中求取合适的反馈变量K,然后与仿真模型结合构成最优控制的水箱液位系统,通过图形分析是否满足系统的性能参数;4、加入P、PI、PD、PID环节分别进行调试;5、选取合适的极点并通过图形分析是否满足系统的性能参数;6、比较加入各种不同PID 环节下的优缺点;7、实物搭接;8、比较在不加扰动和加扰动情况下以及在各种不同环节作用下系统性能。
二.水箱液位控制系统的设计及实物调试该题目包括MATLAB 软件仿真和硬件实物调试部分,软件仿真的目的是对 系统先进行建模,然后设计控制器使其满足任务书上的性能指标要求,并调整控制器参数,分析控制器各参数对系统稳定性的影响。
双容水箱液位控制系统设计

双容水箱液位控制系统设计首先,双容水箱液位控制系统的基本原理是根据水位信号的反馈来控制水泵的启停。
当水箱液位低于设定值时,水泵启动,开始抽水;当液位达到设定值时,水泵停止运行。
这样就可以实现水箱液位的自动控制。
第一,确定水箱的容积和设计液位。
容积和设计液位的确定需要根据实际应用情况来选择,一般要考虑水泵的流量和工作时间等因素。
容积大的水箱可以减少水泵启停的频率,但其建设和维护成本也较高。
第二,确定水位传感器的选择和安装。
水位传感器是检测水箱液位的关键部件,可以选择浮子式传感器、超声波传感器等。
选择合适的传感器需要考虑其精度、可靠性、成本和使用环境等因素。
安装传感器时要确保其与水箱的接触良好,避免信号干扰。
第三,确定控制器的选择和编程。
控制器是实现水位控制的核心部件,可以选择PLC、单片机等。
控制器的选择要考虑其处理能力、输入输出接口和编程灵活性等因素。
编程时需要设置液位设定值和控制逻辑,使得系统能够准确地控制水泵的启停。
第四,确定水泵的选择和安装。
水泵是水箱液位控制系统的关键设备,可以选择离心泵、自吸泵等。
选择合适的水泵需要考虑其流量、扬程、功率和效率等因素。
水泵的安装要确保其与水箱的连接可靠,并考虑水泵的防护和维护问题。
第五,确定报警和保护措施。
对于水箱液位控制系统,需要设置相应的报警和保护机制,以及应急措施。
例如,当水泵故障或水箱液位异常时,系统应该能够及时发出报警,并采取相应的措施避免设备损坏或事故发生。
最后,测试和调试系统。
在系统设计和安装完成后,需要进行全面的测试和调试工作。
首先测试传感器和控制器的工作是否正常,然后测试水泵的启停控制是否准确。
同时,还需要进行系统的稳定性和灵敏度测试,确保系统能够稳定运行和满足实际需求。
总之,双容水箱液位控制系统的设计需要综合考虑容积、液位传感器、控制器、水泵、报警保护和测试调试等方面的因素。
只有设计合理并正确配置这些部件,才能实现高效、稳定的液位控制。
水箱液位控制系统设计设计

水箱液位控制系统设计摘要液位是工业工程中的常见变量,在各种过程控制中的应用越来越广泛。
例如在食品加工、溶液过滤、化工生产等多种行业的生产加工过程中,通常需要使用蓄液池,而蓄液池中的液位需要维持一定的高度,既不能太满溢出造成危险,也不能过少而无法满足生产需求。
因此液位高度是工业控制过程中一个重要的参数,特别是在动态的状态下,采用合适的方法对液位进行检测、控制,能收到很好的效果。
本文以实验室自制的双容水箱作为液位控制研究对象,通过上位机、研华的PCI-1710L板卡、电动调节阀、压力液位变送器组成的控制系统和压力液位变送器、变频器、水泵组成的控制系统分别实现了单容水箱的远程控制和就地控制,并在文章最后理论性的阐述了双容水箱的控制方法。
设计中以组态软件--组态王为开发工具,开发了系统的监视与控制界面,并且自己编程实现PID控制程序,使系统具备了对现场过程数据的动态监视功能、历史数据的归档功能、异常信号的报警功能以及现场操作的指导功能。
关键词:水箱液位;PID控制;组态王;变频器;The design of the tank level control systemAbstractThe liquid level is one of the common variables in Industrial Engineering, the process control is more and more widely used. For example, in the production process of food processing, filtering solution, chemical production and other industries, liquid storage tank is usually used, and making the liquid level of liquid storage tank at a certain height is very important, neither too overflow to risk nor too short not to meet the production demand. Therefore, the height of liquid level in the industrial control process is one of the important parameters, especially in the dynamic condition. If adopt the appropriate method for the control of the liquid level detection, we can get good effect.The research object is based on the self-made double tank level control system, through the host computer, the Advantech PCI-1710L card, the electric control valve, the pressure liquid level transmitter, the frequency converter and the water pump we get two different kinds of the cascade control system for the single water tank of the liquid level control, respectively realized the effect of the remote control and local control. And at last, this article expounds the theory of double water tank control method.Choose the design of configuration software – King view for development tools, we have had the development of the system to monitor and control interface, and also have programmed PID control procedures that made the system has a field process data, dynamic monitoring historical data archiving function, abnormal signal of the alarm function and the guidance function of the on-site operation.Keywords: Tank level; PID control; King view;Frequency converter;目录摘要 (I)Abstract .......................................................................................................................... I I 第一章绪论 (1)1.1选题背景及意义 (1)1.2 液位控制系统的发展现状 (2)1.3 本文的主要工作 (3)第二章控制对象及算法简介 (5)2.1被控制变量的选择 (5)2.2 执行器的选择 (5)2.3 压力液位变送器的选择 (5)2.4 研华板卡PCI-1710L简介 (6)2.4.1模拟量输入连接 (8)2.5 PID控制算法概述 (9)2.5.1 PID控制器的应用与发展 (9)2.5.2 PID算法类型[1] (10)2.5.3 PID两种控制方式 (11)第三章基于组态王的单容水箱液位控制系统 (13)3.1组态王简介[8] (13)3.1.1组态王软件的组成 (13)3.1.2 制作工程的一般步骤 (14)3.1.3 组态王与外部设备通信 (14)3.2控制方案选取 (15)3.3 上位机组态软件的开发 (16)3.3.1监控画面 (16)3.3.2构造数据库 (17)3.3.3数据通信 (19)3.3.4 命令语言的编写 (20)3.3.5 实时曲线 (21)3.3.6 历史报警查询[11] (21)3.3.7 历史曲线 (23)3.4 参数整定 (25)第四章基于变频器的单容液位控制系统 (26)4.1 变频调速基础 (26)4.2 三菱通用变频器FR-D700简要介绍 (27)4.2.1 FR-D700简介 (27)4.2.2 三菱变频器FR-D740-1.5K-CHT常规介绍 (28)4.2.3控制电路接线端极端子功能介绍 (29)4.2.4 操作面板及其功能介绍 (31)4.3 变频器的作用 (31)4.4 控制系统调试 (32)4.4.1 操作步骤 (33)4.4.2 参数整定 (33)第五章双容水箱液位控制系统 (35)5.1串级控制 (35)5.1.1 串级控制概念 (35)5.1.2 水箱液位控制方法 (36)5.1.4 串级控制的特点 (36)5.2 串级控制系统的设计 (36)5.2.1 变量的选择 (36)5.2.2主副控制器的控制规律 (37)5.2.3 主副控制器正反作用的选择 (37)5.3串级控制系统的工业应用 (38)5.4 本章小结 (38)总结 (39)参考文献 (40)附录 (41)致谢 (43)第一章绪论1.1选题背景及意义液位是工业生产过程控制中很重要的被控变量。
PLC水箱液位控制设计

PLC水箱液位控制设计水箱液位控制是工程和工业应用中的一个重要任务,受到工业生产和生活的影响。
PLC(可编程逻辑控制器)被广泛应用于自动化控制系统中。
在这里,我们将讨论PLC在水箱液位控制中的设计和应用。
一、设计要求1.自动控制水箱液位:根据需要自动控制水箱液位,以保持水箱液位在合适的范围内。
2.液位传感器:使用能够准确测量液位的传感器,例如超声波、浮子或电容传感器等。
3.控制阀门:根据液位传感器的信号,控制阀门的开关来调节进出水的流量。
4.安全保护:设置安全保护机制,如最高和最低液位报警,以防止水箱溢出或干涸。
二、系统设计1.硬件设计:选择适当的液位传感器、PLC和执行器,如电磁阀,来实现水箱液位的控制。
2.软件设计:编写PLC的控制程序,包括液位传感器读取、液位控制算法和输出控制信号给执行器的逻辑。
3.输入输出设计:将传感器连接到PLC的输入模块,并将执行器连接到PLC的输出模块。
4.安全保护设计:为了确保系统的安全性,设计液位报警机制,当液位低于最低限制或高于最高限制时,触发报警信号。
三、工作原理1.初始状态:水箱液位低于最低限制,控制系统开始工作。
2.传感器读取:PLC读取液位传感器的信号,并将其转换为数字量进行处理。
3.液位控制算法:根据传感器信号,PLC计算水箱液位的偏差,并决定相应的动作,如开启或关闭阀门。
4.输出控制信号:根据液位控制算法的结果,PLC将控制信号发送到执行器(电阀)以调节进出水量。
5.液位报警:如果液位低于最低限制或高于最高限制,PLC将触发报警信号以提醒操作员。
四、实施细节1.选择合适的液位传感器:液位传感器的选择取决于应用场景和预算。
超声波传感器具有高精度和无接触的特点,但价格较高。
浮子和电容传感器价格较低,但精度较低。
2.选择适当的PLC:根据应用要求选择适当的PLC。
考虑到通信接口、输入输出数量和处理速度等因素。
3.选择适当的执行器:根据流量要求选择适当的执行器,例如电磁阀。
PLC水箱液位控制系统毕业设计

PLC水箱液位控制系统毕业设计PLC水箱液位控制系统是一种基于可编程逻辑控制器(PLC)的自动控制系统,用于监测和调节水箱中的液位。
这个系统可以应用于各种场景,比如工业生产中的水箱液位控制、建筑物的水池液位控制等。
在本篇文章中,将详细介绍PLC水箱液位控制系统的设计和实现。
首先,我们需要对PLC水箱液位控制系统的硬件进行设计。
其中包括传感器模块、执行器模块和PLC控制器。
传感器模块用于监测水箱中的液位,可以选择合适的液位传感器,如浮球开关、超声波传感器等。
执行器模块用于控制水箱中的液位,可以选择水泵或阀门等执行器。
PLC控制器用于接收传感器模块的信号,根据预设的控制策略来控制执行器模块的工作。
同时,还需要考虑电源模块、通信模块等其他辅助模块。
接下来,我们需要对PLC水箱液位控制系统的软件进行设计。
PLC控制器通常使用Ladder Diagram(梯形图)进行编程。
在本设计中,我们可以根据液位传感器的信号来控制执行器的开关。
当液位低于一定阈值时,PLC控制器可以启动水泵或打开阀门,以增加水箱中的液位。
当液位高于一定阈值时,PLC控制器可以停止水泵或关闭阀门,以减少水箱中的液位。
同时,我们还可以增加一些安全措施,如设置最大液位和最小液位报警,当液位超出范围时,PLC控制器可以发出警报信号或采取相应的措施。
在实际应用中,我们还可以通过人机界面(HMI)来对PLC水箱液位控制系统进行监控和操作。
通过HMI,我们可以实时查看水箱中的液位,修改控制策略,记录操作日志等。
同时,我们还可以将PLC水箱液位控制系统与上位机进行通信,实现远程监控和控制。
最后,我们需要对PLC水箱液位控制系统进行实验验证。
在实验中,我们可以模拟不同的液位情况,观察PLC控制器的响应和执行器的工作情况。
通过实验,我们可以测试系统的稳定性、精度和可靠性,并对系统进行优化和改进。
总结而言,PLC水箱液位控制系统是一种自动控制系统,用于监测和调节水箱中的液位。
实验方案:水箱液位串级控制系统
过程控制综合实验报告实验名称:水箱液位串级控制系统专业:班级:姓名:学号:实验方案一、实验名称:水箱液位串级控制系统二、串级控制系统的概述1、图5-1是串级控制系统的方框图。
该系统有主、副两个控制回路,主、副调节器相串联工作,其中主调节器有自己独立的给定值R,它的输出m1作为副调节器的给定值,副调节器的输出m2控制执行器,以改变主参数C1。
图5-1 串级控制系统方框图R-主参数的给定值;C1-被控的主参数;C2-副参数;f1(t)-作用在主对象上的扰动;f2(t)-作用在副对象上的扰动。
2、串级控制系统的特点串级控制系统及其副回路对系统控制质量的影响已在有关课程中介绍,在此将有关结论再简单归纳一下。
(1).改善了过程的动态特性;(2).能及时克服进入副回路的各种二次扰动,提高了系统抗扰动能力;(3).提高了系统的鲁棒性;(4).具有一定的自适应能力。
3、主、副调节器控制规律的选择在串级控制系统中,主、副调节器所起的作用是不同的。
主调节器起定值控制作用,它的控制任务是使主参数等于给定值(无余差),故一般宜采用PI或PID调节器。
由于副回路是一个随动系统,它的输出要求能快速、准确地复现主调节器输出信号的变化规律,对副参数的动态性能和余差无特殊的要求,因而副调节器可采用P或PI调节器。
4、主、副调节器正、反作用方式的选择正如单回路控制系统设计中所述,要使一个过程控制系统能正常工作,系统必须采用负反馈。
对于串级控制系统来说,主、副调节器的正、反作用方式的选择原则是使整个系统构成负反馈系统,即其主通道各环节放大系数极性乘积必须为正值。
各环节的放大系数极性是这样规定的:当测量值增加,调节器的输出也增加,则调节器的放大系数K c为负(即正作用调节器),反之,K c为正(即反作用调节器);本装置所用电动调节阀的放大系数K v恒为正;当过程的输入增大时,即调节器开大,其输出也增大,则过程的放大系数K0为正,反之K0为负。
基于S7-1200PLC的水箱液位控制系统的设计
基于S7-1200PLC的水箱液位控制系统的设计重庆科技学院摘要水箱液位控制系统是一种用于监测、控制水箱液位的自动化设备。
它通过搭载传感器、控制器和执行机构等组件,实现对水箱液位的实时监控和自动控制。
通常,水箱液位控制系统由传感器,控制器,执行机构。
水箱液位控制系统的使用范围广泛,包括建筑物、工业生产、农业灌溉、城市给排水和环保等领域。
它具有结构简单、安装方便、实时性强等特点,该系统能够提高水资源的利用效率、减少用水浪费和防止水源的污染。
本文基于S7-1200 PLC实现水箱液位控制系统设计。
该系统由硬件和软件两部分组成,硬件包括PLC、人机界面触摸屏、传感器、执行器等;软件实现传感器数据处理、PID稳态控制、安全等功能;关键词:液位控制 PLC PID 传感器重庆科技学院本科生毕业设计 3水箱液位控制系统硬件设计1绪论在工业领域,几乎在各个行业都会或多或少的涉及到液位的检测等问题,然而液位变量具有延迟滞后性,参数不稳定,复杂多变等问题,因此,这就需要本文采取更为精确的控制器去实现液位变量的检测。
传统控制具有很多缺陷:比如精度低、速度慢、灵敏度低等。
一个稳定的液位系统,可以保证安全可靠的工业生产、高效的生产效率、充分合理的利用能源等,大大提高了工业生产的经济价值。
日益激烈的市场竞争,要求本文的控制技术必须更加先进,此前的控制技术已落伍,显然无法满足需求,这种对先进技术的需求加速了可编程逻辑控制器的问世。
引入PLC控制器后,能够使控制系统变得更集中、有效、及时。
2水箱液位控制总体方案设计2.1水箱液位控制系统实际应用特征水箱液位控制系统是一种广泛应用于水箱的自动化控制系统,常见于民用和工业领域。
实际应用中,水箱液位控制系统具有以下特征:①实时性强:系统能够实时检测水箱内的液位信息,并根据液位变化及时控制水泵的启停,保证水位稳定。
②可靠性高:系统通过各类安全措施确保水泵的正常启停,不会出现过量或不足的水位情况,避免因为水位变化带来的安全隐患。
水箱液位控制系统设计设计
水箱液位控制系统设计设计一、系统概述水箱液位控制系统是一个智能化的系统,用于控制水箱液位并保持在设定的范围内。
该系统由传感器、控制器和执行器组成,通过传感器检测水箱液位,并将液位信号传输给控制器,控制器根据设定的参数进行判断和控制,最终通过执行器完成控制动作。
二、系统组成1.传感器:使用浮球传感器或超声波传感器来检测水箱液位。
传感器将液位转化为电信号,并传输给控制器。
2.控制器:控制器是系统的核心部分,它接收传感器的信号,并进行处理和判断。
控制器可以根据设定的参数来判断液位是否达到目标范围,并通过输出信号来控制执行器的动作。
此外,控制器还需要具备人机界面,方便用户进行参数设置和监测。
3.执行器:执行器根据控制器的控制信号,完成相应的动作。
例如,当液位过高时,执行器可以控制水泵关闭或排水阀打开,以降低液位;当液位过低时,执行器可以控制水泵开启或进水阀打开,以提高液位。
4.电源:为整个系统提供电能。
三、系统设计思路1.确定液位控制的范围:根据实际需求,确定水箱液位的上限和下限。
一般情况下,液位控制范围应在50%至85%之间。
2.选择合适的传感器:根据水箱的结构和液位控制要求,选择合适的传感器。
浮球传感器适用于小型水箱,超声波传感器适用于大型水箱。
3.设计控制器:控制器的主要功能是接收传感器的信号、处理和判断液位,并输出控制信号。
在设计控制器时,需要考虑如下几个方面:-信号处理:传感器的信号可能存在噪声,需要进行滤波处理,保证信号的准确性。
-参数设置:控制器应提供人机界面,方便用户根据实际需求设置参数,例如液位上下限、启停时间等。
-控制算法:根据设定的参数,控制器需要实现相应的控制算法,例如比例控制、积分控制等。
-控制输出:控制器根据判断结果输出控制信号,控制执行器的动作。
4.选用适配的执行器:根据液位控制要求,选择适合的执行器,例如水泵、进水阀、排水阀等。
5.系统集成与调试:将传感器、控制器和执行器进行连接和集成,进行系统调试和性能测试。
单容水箱液位控制系统的设计
单容水箱液位控制系统的设计水箱液位控制系统是指利用传感器等技术手段实时监测水箱液位,并通过控制装置调节供水和排水流量,使水箱的液位保持在设定的范围内的系统。
1.系统组成(1)传感器:负责实时监测水箱液位,常用的传感器有浮球传感器、电阻传感器、超声波传感器等。
传感器要具有高精度、稳定性好、可靠性高等特点。
(2)控制装置:根据传感器反馈的液位信号,控制水泵或排水装置,调节供水和排水流量,使水箱液位保持在设定的范围内。
控制装置可以采用微控制器、PLC等。
(3)供水装置:负责向水箱供水,可以是普通水泵、恒压供水设备等。
供水装置的选型要考虑流量、扬程等参数。
(4)排水装置:负责将多余的水排出水箱,可以是排水泵、电磁阀等。
排水装置的选型要考虑排水能力、响应时间等参数。
(5)控制面板:提供操作和显示功能,用于设定液位控制的参数和实时显示液位情况。
2.系统原理(1)运行原理:系统根据设定的最低液位和最高液位,当液位低于最低液位时,控制装置开启供水装置;当液位高于最高液位时,控制装置开启排水装置。
当液位处于最低液位和最高液位之间时,控制装置停止供水和排水装置。
(2)至空调和给排水系统的作用:当液位低于最低液位时,系统将启动供水装置,为空调系统提供水源;当液位高于最高液位时,系统将启动排水装置,将多余的水排出,保证水箱不溢出。
3.系统设计要点(1)传感器的选择:根据实际情况选择不同类型的传感器。
传感器的安装位置要合理,避免水箱漏水或传感器受到污染。
(2)控制装置的设计:根据传感器反馈的液位信号,计算控制装置的输出信号,控制供水和排水装置的运行。
要考虑控制装置的响应时间、动作准确性等参数。
(3)供水装置和排水装置的选型:选型要根据水箱的容量和液位控制需求确定。
要考虑流量、扬程、动力源等因素。
(4)安全保护措施:系统应具备过液位保护、过流量保护、电源故障保护等功能,确保系统的安全可靠性。
(5)控制面板的设计:控制面板应具有操作简便、参数设定方便、实时显示液位等功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制系统课程设计1、设计题目:水箱液位控制系统的设计及实物调试2、设计目的1、加强对自动控制原理这门课程的认识,初步认识工程设计方法。
2、通过对水箱液位控制系统的设计,进一步理解书本知识,提高实践能力,增强分析问题,解决问题的能力。
3、学习并掌握Matlab的使用方法,学会用Matlab仿真。
4、学会对仿真结果进行分析,计算,并应用到实践设计中去。
3、设计设备1、ACCC—Ⅰ型自动控制理论及计算机控制技术实验装置2、数字式万用表3、示波器4、MATLAB软件4、设计任务(1)复习有关教材、到图书馆查找有关资料,了解水箱液位控制系统的工作原理。
(2)总体方案的构思根据设计的要求和条件进行认真分析与研究,找出关键问题。
广开思路,利用已有的各种理论知识,提出尽可能多的方案,作出合理的选择。
画出其原理框图。
(3)总体方案的确定可从频域法、跟轨迹法分析系统,并确定采用何种控制策略,调整控制参数。
(4)系统实现搭建系统上的硬件电路,实现开环控制,记录实验数据。
引入闭环控制,将设计好的控制策略实现其中,根据实际响应效果调整参数直至最优,并记录数据5、设计要求1.分析系统的工作原理,进行系统总体设计。
2.选择系统主电路各元部件,进行主电路设计,并完成系统调试。
3.构成开环系统,并测其动态特性。
4.测出各环节的放大倍数及其时间常数。
5.分析单闭环无差系统的动态性能。
6.比较开环时和闭环时的动态响应。
7.构成水箱液位闭环无静差系统,并测其动态性能指标和提出改善系统动态性能的方法,使得系统动态性能指标满足s t s t s r 5.0,2.0%,5%<<≤σ。
6、MATLAB 软件仿真6.1 软件仿真部分设计要求1、参考文献【1】完成对电机的数学建模,拉普拉斯变换后得到系统的传递函数;2、带入表中的水箱液位系统参数,求出系统的开环传递函数;3、绘制出系统的开环传递函数的单位阶跃响应,分析系统的单位阶跃响应,得到相关性能指标;4、分步骤实现系统的PID 校正,分别进行比例控制(P )校正,比例微分控制(PD )校正,比例积分控制(PI )校正和比例积分微分控制(PID )校正;5、运用《自动控制原理》知识分析系统的性能特征,从阶跃响应性能指标,频域特性等角度分析系统校正前和校正后的性能;6、设计后的系统满足如下性能指标:s t s t s r 5.0,2.0%,5%<<≤σ;7、改变输入信号,将阶跃信号分别换成方波信号,信号的周期设置为4s ,幅值为5V 。
6.2 模型建立1. “水箱系统”的液位控制工艺过程原理图参考文献【1】,可以得到水箱液位控制系统的工艺过程原理图如图6.2.1所示图6.2.1图中:Q—水箱流入量;1Q—水箱流出量;2A—水箱截面积;u—进水阀开度;f—出水阀开度;h—水箱液位高度;h—水箱初始液位高度;K—阀体流量比例系数。
2. 软件仿真单元框图根据工艺过程原理图(图6.2.1)可设计出仿真单元的原理图:图6.2.23. 水箱液位系统相关参数表6.2.36. 3 MALAB 仿真 1. 超前串联校正仿真: (1)输入程序根据文献【1】中提供的方法以及自动控制原理课程设计指导书中提供的参数推算开环传递函数)(s G 假设f 不变, 系统初始态为稳态, 由提供的参数得2010,10,2m A K h ===。
则:dtdhAQ -Q 21=ΔΔ (1) u K Q ⨯=∆1 (2) h K Q ⨯=2 (3)对(3)式在0h 处进行线性化, 得:h h K Q ∆⨯⨯=∆022 (4)对(1)、(2)、(4)式进行拉普拉斯变换后得:)()()(21s H A s s Q s Q ⨯⨯=- (5) )()(1s U K s Q ⨯= (6))(2)(02s H h K s Q ⨯⨯=(7)由(5)、(6)、(7)式联立化简得到系统的闭环传递函数)1536.3(1)(+=s s G在MATLAB 命令窗口定义好模型)1536.3(1)(+=s s G ,MATLAB 程序代码如下: num=1den=[3.536,1] G=tf(num,den)得到结果如下: num = 1 den =3.5360 1.0000Transfer function: 1 ----------- 3.536 s + 1 >> sisotool(G)按回车键进入SISO 系统设计工具进行系统设计。
(2)将模型载入SISO 设计工具通过命令载入模型,完成整个系统的闭环结构,根据系统的相关参数,可知需修改54.3=H ,10=F 。
通过调节系统增益来改善系统反应速度,通过增加积分环节以调节系统的稳态误差,通过增加调节函数的零极点并调节零极点位置来改变系统的稳定性减小误差,通过以上各项措施来改善系统的性能指标并最终使系统达到要求的性能指标1. 调整增益图5.3.12. 增加超前校正网络并调整超前校正网络的零极点分布图5.3.23. 系统仿真波形图图5.3.3由系统仿真波形图可以看出s s t r 2.0005.0<=,s s t s 5.00081.0<=,%5%697.0%<=σ,所以系统是满足要求的,此时超前校正调节函数为)]0011.01([)76.01(9.548)(s s s s G ++⨯=2. PID 校正仿真: (1) PID 建模根据原理图和系统结构图,参考文献【1】利用MATLAB 中Simulink 对系统进行仿真研究,构建模拟系统闭环循环图图5.3.4(2)PID校正1. 无任何调节状态(P=1,I=0,D=0)图5.3.5通过Matlab进行仿真运行后,得到系统的阶跃响应曲线如下:图5.3.6从系统的阶跃响应曲线图可知:“水箱系统”液位控制系统在无调节器的情况下,过渡过程是一个非周期过程,是稳定的系统,调节时间教短,响应比较迅速,但是,该系统是一个有静差的系统,应该给系统增加一个调节器。
2.无静差系统图5.3.7通过Matlab进行仿真运行后,得到系统的阶跃响应曲线如下:图5.3.83.衰减振荡系统图5.3.9通过Matlab进行仿真运行后,得到系统的阶跃响应曲线如下:图5.3.106.4 结论:1.“水箱系统”的液位控制可以实现无静差,并且具有较好的动态过程控制。
2. P参数不宜设置过大,否则系统会出现不稳定情况。
3. 当I参数设置较大,即积分作用较强时,可以出现衰减振荡过程。
4. 本系统采用PI调节作用,对抗干扰性能的要求也能很好的满足。
7、硬件调试单元:7.1硬件单元设计要求:1、参考《课程设计硬件操作指南》完成实物接线;2、将阶跃信号作用域系统,调节信号的占空比、频率和幅值;3、测出系统在不同电阻和电容取值情况下的阶跃响应输出;4、分析系统的元件取值对输出影像,分别从有扰动、无扰动,有积分、无积分等角度分析。
7.2设计原理:水箱液位控制系统框图如图所示,由给定、PID调节器、功率放大、水泵、液位测量和输出电压反馈电路组成。
在参数给定的情况下,经过PID运算产生相应的控制量,使水箱里的水位稳定在给定值。
图7.2.1给定Ug由ACCT—Ⅱ自动控制理论及计算机控制技术的实验面板上的电源单元U1提供,电压变化范围为1.3V~15V。
PID调节器的输出作为水泵的输入信号,经过功率放大后作为水泵的工作电源,从而控制水的流量。
液位测量通过检测有机玻璃水箱的水压,转换成电压信号作为电压反馈信号,水泵的水压为0~6Kpa,输出电压为0~10V,这里由于水箱的高度受实验台的限制,所以调节压力变送器的量程使得水位达到250mm时压力变送器的输出电压为5V。
根据实际的设计要求,调节反馈系数 ,从而调节输出电压。
7.3 硬件调试单元接线原理图:图7.2.2其中元件参数可自己调整,以下为参考值:1/1101101001543210====Ω=Ω===i f R R FC KR MR K R K R R R μ 7.4 具体实验步骤:1、将ACCT —Ⅱ面板上1U 单元的可调电压接到g U ;2、给定输出接PI 调节器的输入,这里参考电路中0=d K ,4R 的作用是提高PI 调节器的动态特性。
3、经PI 运算后给水泵驱动电路提供输入信号,即将调节器电路单元的输出接到水泵的正极输入端(IN+),负极端(IN-)接地;4、液位测量的输出接到电压反馈的输入端,由于液位测量输出的电压值为正值,所以反馈回路中接一个反馈系数可调节的反相器。
调节反馈系数i f R R =β,从而调节输出的电压0U ;5、接好上述线路,全面检查线路后,合上实验面板上的电源开关,再合上液位测量水泵的驱动电源开关,调整PI 参数,是系统稳定,同时观测输出电压变化情况。
6、在闭环系统稳定的情况下,外加干扰信号,系统达到无静差。
如达不到,则根据PI 参数对系统性能的影响重新调节PI 参数。
7、改变给定信号,观察系统动态特性。
7.5 设计所测数据:1、改变R5的值,将其分别设置成10k Ω和510k Ω,并观察输出曲线。
2、外加输出干扰,在水位接近设定值时打开出水阀,观察输出曲线。
3、改变反馈增益系数并观察输出曲线。
7.6 设计实验所测得的数据及分析:1. 取给定电压F C k R R R V U i f i μ1,10,1,515=Ω===时,线路各点的电压输出波形图如下所示:图7.6.1 图7.6.2图7.6.3 图7.6.4图7.6.1所示为系统从进水阀开始进水到液面达到给定值过程中水泵输入电压与液面输出电压的波形比较;图7.6.2所示为系统反馈回路输出与系统比较器输出的波形比较;图7.6.3所示为系统给定值与液面输出电压比较波形;图7.6.4所示为有扰动时系统系统给定值与液面输出电压比较波形。
2. 取给定电压F C k R R R V U i f i μ1,510,1,515=Ω===时,线路各点的电压输出波形图如下所示:图7.6.5 图7.6.6图7.6.7 图7.6.8其中图7.6.5展示的是系统从进水阀开始进水一直到液位达到设定值过程中液位输出电压和水泵输入电压的比较波形;图7.6.6展示的是系统从进水阀开始进水一直到液位达到设定值是液位输出电压与给定值的比较波形;图7.6.7展示的是系统从进水阀开始进水一直到液位达到设定值过程中比较器输出电压与反馈回路反相器输出电压的比较波形;图7.6.8展示的是当液位达到给定值后一段时间再外加扰动后水泵输入电压与液位输出电压的比较波形。
3.取给定电压V U i 5=,i f R R 分别取2和3.3,Ω=k R 105,F C μ11=时,线路各点的电压输出波形图如下所示:图7.6.9 图7.6.10图7.6.11 图7.6.11由这一组波形图与第一组波形图相比较可以看出,改变反馈回路的增益i f R R 对系统有影响。