伺服电机功率计算选型
伺服基本原理及伺服选型计算

18
举例计算3
1. 计算折算到电机轴上的负载惯量 重物折算到电机轴上的转动惯量JW = M * ( PB / 2π)2
= 200 * (2 / 6.28)2
= 20.29 kg.cm2 螺杆转动惯量JB = MB * DB2 / 8
= 40 * 25 / 8
= 125 kg.cm2 总负载惯量JL = JW + JB = 145.29 kg.cm2 2. 计算电机转速 电机所需转速 N = V / PB = 30 / 0.02 = 1500 rpm
10
伺服选型原则
• • • • 连续工作扭矩 < 伺服电机额定扭矩 瞬时最大扭矩 < 伺服电机最大扭矩 (加速时) 负载惯量 < 3倍电机转子惯量 连续工作速度 < 电机额定转速
11
举例计算1
已知:圆盘质量M=50kg,圆盘直径 D=500mm,圆盘最高转速60rpm, 请选择伺服电机及减速机。
19
举例计算3
3. 计算电机驱动负载所需要的扭矩 克服摩擦力所需转矩Tf = M * g * µ * PB / 2π / η = 200 * 9.8 * 0.2 * 0.02 / 2π / 0.9 = 1.387 N.m 重物加速时所需转矩TA1 = M * a * PB / 2π / η = 200 * (30 / 60 / 0.2) * 0.02 / 2π / 0.9 = 1.769 N.m 螺杆加速时所需要转矩TA2 = JB * α/ η = JB * (N * 2π/ 60 / t1) / η = 0.0125 * (1500 * 6.28 / 60 / 0.2) / 0.9 = 10.903 N.m 加速所需总转矩TA = TA1 + TA2 = 12.672 N.m
伺服电机选型计算公式

伺服电机选型计算公式伺服电机选型计算公式是指通过一系列的计算公式来确定伺服电机的合适参数,以满足特定需求。
伺服电机选型的主要目标是确定伺服电机的额定转矩、额定电流、额定功率等参数,以及选择合适的伺服驱动器。
下面将介绍一些常用的伺服电机选型计算公式。
1.负载的转矩计算公式:负载的转矩是伺服电机选型的基础,通过计算负载的转矩,可以确定伺服电机的额定转矩。
负载的转矩可以通过以下公式计算:负载转矩=(负载力*负载半径)/(传动效率*减速比)2.伺服电机的额定转矩计算公式:伺服电机的额定转矩是指在额定转速下,电机能够提供的最大转矩。
额定转矩可以通过以下公式计算:额定转矩=(负载转矩+加速扭矩)/传动效率3.伺服电机的额定电流计算公式:伺服电机的额定电流是指在额定转矩下,电机所需的额定电流。
额定电流可以通过以下公式计算:额定电流=额定转矩*电流系数/额定转速4.伺服电机的额定功率计算公式:伺服电机的额定功率是指在额定转矩和额定转速下,电机所提供的对外功率。
额定功率可以通过以下公式计算:额定功率=额定转矩*额定转速/9.555.伺服驱动器的额定功率计算公式:伺服驱动器的额定功率是指驱动器所能提供的最大功率。
额定功率可以通过以下公式计算:额定功率=伺服电机的额定功率/驱动器的效率除了上述几个常用的伺服电机选型计算公式外,还需要考虑一些其他因素,例如:负载的加速时间、负载的惯性矩、伺服系统的控制精度等,这些因素都会对伺服电机的选型产生影响,需要综合考虑。
同时,还需要根据具体的应用环境和需求,选择合适的伺服电机和驱动器型号,以确保系统的性能和可靠性。
需要注意的是,伺服电机选型计算公式只是一个参考,实际选型过程中还需要考虑一系列的工程参数和实际情况,同时也需要借助一些专业的伺服电机选型软件,以更准确地确定伺服电机的参数。
伺服电机的选型计算及应用案例介绍
1.滚珠丝杆的质量: Bw=ρxV=7.9*103*π(0.02/2)2*0.5
=1.24kg
2.负载部分的惯量:
JL=JC+JB=JC+BW*BD2/8+WA*BP2/4π2 =0.00001+(1.24*0.022)/8+10*0.022/4π2 =1.73*10-4kg.m2
3.预选电机
若选200W,则JM= 0.14*10-4kg.m2
六.实例应用讲解
案例1
已知:负载重量WA=10kg,螺杆螺距BP=20mm,螺杆直径 BD=20mm,螺杆长BL=0.5m,机械效率η=0.9,摩擦系数 μ=0.1,负载移动距离0.3m,加减速时间ta=td=0.1s,匀速 时间tb=0.8s,静止时间t4=1s。联轴器的惯量Jc= 10x10-6 kg.m2 .请选择满足负载需求的最小功率伺服电机。
2.与转动惯量有关的因素:
1.刚体的总质量 2.质量分布 3.转轴的位置
3.转动惯量的计算: (1)单个质点的转动惯量: J=mr2
(2)质量离散分布刚体的转动惯量:
J m jrj2 m1r12 m2r22 j
r2 m2
(3)质量连续分布刚体的转动惯量:
r1
m1
r3 m3
转轴
J r2dm dm:质量元
4.电机转速和扭矩(转矩)公式
扭矩公式:T=9550P/n
T是扭矩,单位N·m; P是输出功率,单位KW; n是电机转速,单位r/min
扭矩公式:T=973P/n
T是扭矩,单位kg·m; P是输出功率,单位KW; n是电机转速,单位r/min
5.扭矩计算
电机转矩T (N.m)
滑轮半径r (m)
伺服电机选型计算(自动计算版)

负载质量M(kg)100·滚珠丝杠节距P(mm)5·滚珠丝杠直径D(mm)20·滚珠丝杠质量MB(kg)3·滚珠丝杠摩擦系数μ0.02·因无减速器,所以G=1、η=11②动作模式的决定速度(mm/s)单一变化·负载移动速度V(mm/s)200·行程L(mm)600·行程时间tS(s)3·加减速时间tA(s)1·定位精度AP(mm)0.01③换算到电机轴负载惯量的计算滚珠丝杠的惯量JB= 1.50E-04kg.m2负载的惯量JW= 2.13E-04kg.m2换算到电机轴负载惯量JL=JW J=G2x(J W+J2)+J1 2.13E-04kg.m2L④负载转矩的计算对摩擦力的转矩Tw 3.12E-02N.m换算到电机轴负载转矩TL=Tw 3.12E-02N.m⑤旋转数的计算转数N N=60V/P.G2400r/min⑥电机的初步选定[选自OMNUC U系列的初步选定举例]选定电机的转子·惯量为负载的JM≥J L/307.11E-06kg.m2 1/30*以上的电机选定电机的额定转矩×0.8TMx0.8>T L0.5096>比换算到电机轴负载转矩大的电机N.m* 此值因各系列而异,请加以注意。
⑦加减速转矩的计算加减速转矩TA0.057N.m⑧瞬时最大转矩、有效转矩的计算必要的瞬时最大转矩为T1T1=TA+TL0.0879N.mT2=TL0.0312N.mT3=TL-TA-0.0255N.m有效转矩Trms为0.051N.m功率0.0160198813867548kw⑨讨论负载惯量JL 2.13E-04kg.m2≦[电机的转子惯量JM有效转矩Trms0.051N.m﹤[电机的额定转矩瞬时最大转矩T10.0879N.m﹤[电机的瞬时最大转矩必要的最大转数N2400r/min≦[电机的额定转数编码器分辨率R=P.G/AP.S500(脉冲/转)U系列的编码器规格为204速度(mm/s)3000.210.20.2时间(s)初步选择定R88M-U20030(Jm= 1.23E-05根据R88M-U20030的额定转矩Tm=(N.m)≦[电机的转子惯量JM1.23E-05×[适用的惯量比=30]﹤[电机的额定转矩0.5096N.M3.1E-020.637﹤[电机的瞬时最大转矩 1.528N.M≦[电机的额定转数3000r/minU系列的编码器规格为2048(脉冲/转),经编码器分频比设定至1000(脉冲/转)的情况下使用。
伺服电机功率计算选型课件

案例三:搬运机械臂的伺服电机应用
总结词
大负载、高精度定位
详细描述
搬运机械臂需要承受较大负载并实现高精度定位,伺服电机能够提供足够的扭 矩和精确的控制能力,确保机械臂的稳定运行和精确操作。
伺服电机维护与保
05
养
伺服电机的日常维护
01
02
03
每日检查
检查伺服电机是否有异常 声音、振动或发热,检查 电缆和连接是否松动或破 损。
清洁
定期清除电机上的灰尘和 杂物,保持电机清洁,以 防止灰尘和杂物对电机运 行造成影响。
油脂涂抹
根据需要,在电机的轴承 和齿轮上涂抹适量的润滑 油脂,以减少磨损和摩擦 。
伺服电机的定期保养
定期更换润滑油
根据电机制造商的推荐, 定期更换电机的润滑油, 以保证电机正常运行。
检查绝缘电阻
定期检查电机的绝缘电阻 ,以确保电机电气性能正 常。
伺服电机的工作原理
伺服电机通过将输入的电压或电流信 号转换成转矩或转速,驱动负载进行 转动。
伺服电机内部通常包含一个旋转的转 子,以及一个固定的定子,通过电磁 感应原理实现能量的转换和传递。
伺服电机的分类与特点
根据使用的电源类型,伺服电 机可以分为直流伺服电机和交
流伺服电机两大类。
直流伺服电机具有精度高、 调速范围广、低速稳定性好 等优点,但需要定期更换电
案例一:数控机床的伺服电机应用
总结词
高精度、高效率
详细描述
数控机床需要高精度和高效率的加工能力,伺服电机能够提供稳定的扭矩和转速,确保加工过程的精确性和高效 性。
案例二:包装机械的伺服电机应用
总结词
快速响应、高可靠性
详细描述
包装机械需要快速响应和高可靠性的运行能力,伺服电机能够迅速启动和停止,适应各种包装工艺需 求,确保生产线的稳定性和效率。
伺服电机选型计算实例
1
·注
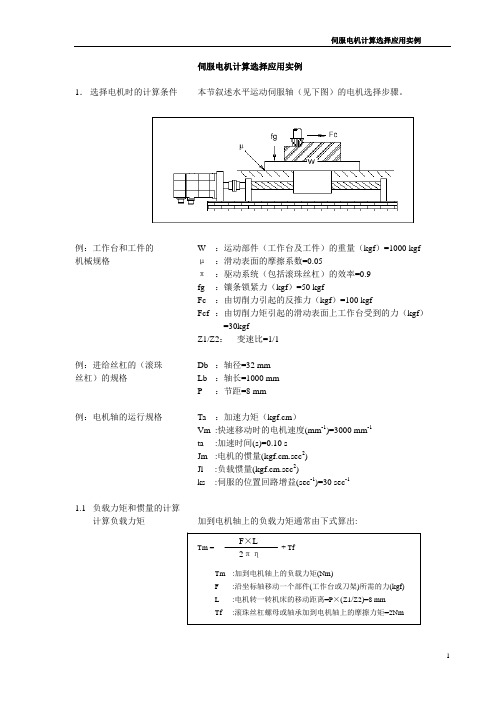
伺服电机计算选择应用实例
无论是否在切削,是垂直轴还是水平轴,F 值取决于工作台的重量, 摩擦系数。若坐标轴是垂直轴,F 值还与平衡锤有关。对于水平工 作台,F 值可按下列公式计算:
不切削时: F = μ(W+fg) 例如: F=0.05×(1000+50)=52.5 (kgf) Tm = (52.5×0.8) / (2×μ×0.9)+2=9.4(kgf.cm) = 0.9(Nm)
Ta =
Vm × 2π× 1
60
ta
×Jm×(1-e-ks。ta)+
+ Vm × 2π× 1
60
ta
×JL×(1-e-ks。ta)÷η
1 Vr = Vm×{1- Ta·ks
(1- e-ks。ta )}
Ta :加速力矩(kgf·cm) Vm :电机快速移动速度(min-1) ta :加速时间(sec) Jm :电机的惯量(kgf.cm.s2) JL :负载的惯量(kgf.cm.s2) Vr :加速力矩开始下降的速度(与 Vm 不同) (min-1) Ks :位置回路的增益(sec-1) η :机床的效率
切削时: F = Fc+μ(W+fg+Fcf) 例如: F=100+0.05×(1000+50+30)=154(kgf) Tmc=(154×0.8) / (2×μ×0.9)+2=21.8(kgf.cm) =2.1(Nm)
为了满足条件 1,应根据数据单选择电机,其负载力矩在不切削时 应大于 0.9(Nm),最高转速应高于 3000(min-1)。考虑到加/减速, 可选择α2/3000(其静止时的额定转矩为 2.0 Nm)。
伺服电机的选型计算方法
步进电机的控制为开环控制,启动频率过高或负载过大易出现丢步或堵转的现象,停止时转速过高易出现过冲的现象,所以为保证其控制精度,应处理好升、降速问题.交流伺服驱动系统为闭环控制,驱动器可直接对电机编码器反馈信号进行采样,内部构成位置环和速度环,不会出现步进电机的丢步或过冲的现象,控制性能更为可靠。
六、速度响应性能不同步进电机从静止加速到工作转速(一般为每分钟几百转)需要200~400毫秒。
交流伺服系统的加速性能较好,以京伺服(KINGSERVO)400W交流伺服电机为例,从静止加速到其额定转速3000RPM仅需几毫秒,可用于要求快速启停的控制场合.综上所述,交流伺服系统在许多性能方面都优于步进电机.但在一些要求不高的场合也经常用步进电机来做执行电动机。
所以,在控制系统的设计过程中要综合考虑控制要求、成本等多方面的因素,选用适当的控制电机。
1.负载惯量的计算.由电机驱动的所有运动部件,无论旋转运动的部件,还是直线运动的部件,都成为电机的负载惯量.电机轴上的负载总惯量可以通过计算各个被驱动的部件的惯量,并按一定的规律将其相加得到.1)圆柱体惯量如滚珠丝杠,齿轮等围绕其中心轴旋转时的惯量可按下面公式计算: J=(πγ/32)*D4L(kg cm2)如机构为钢材,则可按下面公式计算: J=(0.78*10—6)*D4L(kg cm2)式中:γ材料的密度(kg/cm2) D圆柱体的直经(cm) L圆柱体的长度(cm)2)轴向移动物体的惯量工件,工作台等轴向移动物体的惯量,可由下面公式得出: J=W*(L/2π)2 (kg cm2)式中: W直线移动物体的重量(kg) L电机每转在直线方向移动的距离(cm)3)圆柱体围绕中心运动时的惯量如图所示: 圆柱体围绕中心运动时的惯量属于这种情况的例子:如大直经的齿轮,为了减少惯量,往往在圆盘上挖出分布均匀的孔这时的惯量可以这样计算: J=Jo+W*R2(kg cm2)式中:Jo为圆柱体围绕其中心线旋转时的惯量(kgcm2) W圆柱体的重量(kg) R旋转半径(cm)4)相对电机轴机械变速的惯量计算将上图所示的负载惯量Jo折算到电机轴上的计算方法如下: J=(N1/N2)2Jo 式中:N1 N2为齿轮的齿数2. 53。
伺服电机选型计算实例
4
1.2 加速力矩的计算 计算加速力矩:步骤 1
·直线加/减速
伺服电机计算选择应用实例
如果负载惯量比 3 倍的电机惯量大的多,则控制特性将大大下降。 此时,电机的特性需要特殊调整。使用中应避免这样大的惯量。若 机械设计出现这种情况,请与 FANUC 联系。
按下步骤计算加速力矩: 假定电机由 NC 控制加/减速,计算其加速度。将加速度乘 以总的转动惯量(电机的惯量 + 负载惯量),乘积就是加速力矩。 计算式如下。
切削时: F = Fc+μ(W+fg+Fcf) 例如: F=100+0.05×(1000+50+30)=154(kgf) Tmc=(154×0.8) / (2×μ×0.9)+2=21.8(kgf.cm) =2.1(Nm)
为了满足条件 1,应根据数据单选择电机,其负载力矩在不切削时 应大于 0.9(Nm),最高转速应高于 3000(min-1)。考虑到加/减速, 可选择α2/3000(其静止制加/减速时
速度
指令
转矩
Vm
Ta
ta
时间
Vm 速度
计算加速力矩:步骤 2
公式为:
Ta =
Vm ×2π× 1 ×(Jm+JL)
60
ta
1
Ta = 为了得到电机k轴s 上的力矩 T,应在加速力矩 Ta 上增加 Tm
(摩擦力矩)。
T = Ta+Tm T = 12.1(Nm)+0.9(Nm) = 13.0 (Nm)
J L= 0.0082+0.0165 = 0.0247(kgf.cm.s2) 负载惯量对电机的控制特性和快速移动的加/减速时间都有 很大影响。负载惯量增加时,可能出现以下问题:指令变化后,需 要较长的时间达到新指令指定的速度。若机床沿着两个轴高速运动 加工圆弧等曲线,会造成较大的加工误差。 负载惯量小于或等于电机的惯量时,不会出现这些问题。若负载惯 量为电机的 3 倍以上,控制特性就会降低。实际上这对普通金属加 工机床的工作的影响不大,但是如果加工木制品或是高速加工曲线 轨迹,建议负载惯量要小于或等于电机的惯量。
富士伺服电机选型计算资料
(1) 机械系统的种类特点用可变速电机驱动的机械系统, 一般有以下几类。
机构滚珠丝杠(直接连接)用于距离较短的高精度定位。
电机和滚珠丝杠只用联轴节连接, 没有间隙。
电机和滚珠丝杠只用联轴节连接,没有间隙。
滚珠丝杠(减速)选择减速比, 可加大向机械系统传递的转矩。
由于产生齿轮侧隙, 需要采取补偿措施。
由于产生齿轮侧隙,需要采取补偿措施。
齿条和小齿轮用于距离较长的(台车驱动等)定位。
小齿轮转动一圈包含了π值, 因此需要修正。
小齿轮转动一圈包含了π值,因此需要修正。
同步皮带(传送带)与链条比较, 形态上的自由度变大。
主要用于轻载。
皮带轮转动一圈的移动量中包含π值, 因此需要修正。
皮带轮转动一圈的移动量中包含π值,因此需要修正。
将伺服系统用于机械系统中时, 请注意以下各点。
①减速比为了有效利用伺服电机的功率, 应在接近电机的额定速度(最高旋转速度)数值的范围使用。
在最高旋转速度下连续输出转矩, 还是比额定转矩小。
②预压转矩对丝杠加预压力, 刚性增强, 负载转矩值增大。
由预压产生的摩擦转矩, 请参照滚珠丝杠规格书。
③保持转矩升降机械在停止时, 伺服电机继续输出保持力。
在时间充裕的场合, 建议使用保持制动。
机构特点链条驱动多用于输送线上。
必须考虑链条本身的伸长并采取相应的措施。
在减速比比较大的状态下使用, 机械系统的移动速度小。
多用于输送线上。
必须考虑链条本身的伸长并采取相应的措施。
在减速比比较大的状态下使用,机械系统的移动速度小。
进料辊将板带上的材料夹入辊间送出。
由于未严密确定辊子直径, 在尺寸长的物件上将产生误差, 需进行π补偿。
如果急剧加速, 将产生打滑, 送出量不足。
如果急剧加速,将产生打滑,送出量不足。
转盘分度转盘的惯性矩大, 需要设定足够的减速比。
转盘的转速低, 多使用蜗轮蜗杆。
转盘的转速低,多使用蜗轮蜗杆。
主轴驱动在卷绕线材时, 由于惯性矩大, 需要设定够的减速比。
在等圆周速度控制中, 必须把周边机械考虑进来研究。
伺服电机如何进行选型
伺服电机选型技术指南1、机电领域中伺服电机的选择原则现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响。
伺服驱 动装置是许多机电系统的核心,因此,伺服电机的选择就变得尤为重要。
首先要选出满足给 定负载要求的电动机,然后再从中按价格、重量、体积等技术经济指标选择最适合的电机。
述度自廿比 ioa% 各种电机的T-3曲线 (1)传统的选择方法这里只考虑电机的动力问题,对于直线运动用速度v(t),加速度a(t)和所需外力F(t)表 示,对于旋转运动用角速度3 (t),角加速度a (t)和所需扭矩T(t)表示,它们均可以表示为时 间的函数,与其他因素无关。
很显然。
电机的最大功被电机最大应大于工作负载所需的峰值 功率P 峰值,但仅仅如此是不够的,物理意义上的功率包含扭矩和速度两部分,但在实际的 传动机构中它们是受限制的。
用3峰值,T 峰值表示最大值或者峰值。
电机的最大速度决定了 减速器减速比的上限,n 上限二3峰值最大/3峰值,同样,电机的最大扭矩决定了减速比的下限, n 下P 「T 峰值/T 电机,最大,如果n 下限大于n 上限,选择的电机是不合适的。
反之,则可以通过对每 种电机的广泛类比来确定上下限之间可行的传动比范围。
只用峰值功率作为选择电机的原则 是不充分的,而且传动比的准确计算非常繁琐。
(2)新的选择方法一种新的选择原则是将电机特性与负载特性分离开,并用图解的形式表示,这种表示方 法使得驱动装置的可行性检查和不同系统间的比较更方便,另外,还提供了传动比的一个可 能范围。
这种方法的优点:适用于各种负载情况;将负载和电机的特性分离开;有关动力的 各个参数均可用图解的形式表示并且适用于各种电机。
因此,不再需要用大量的类比来检查 电机是否能够驱动某个特定的负载。
在电机和负载之间的传动比会改变电机提供的动力荷载参数。
比如,一个大的传动比会 减小外部扭矩对电机运转的影响,而且,为输出同样的运动,电机就得以较高的速度旋转, 产生较大的加速度,因此电机需要较大的惯量扭矩。