实验三双闭环可逆直流脉宽调速系统
双闭环可逆直流脉宽调速系统的设计与仿真

本科毕业设计论文双闭环可逆直流脉宽调速系统的设计和仿真学生姓名:班级:学号:指导教师:所在单位:电气工程学院答辩日期: 2007年6月25日摘要直流调速系统具有调速范围广、精度高、动态性能好和易于控制等优点,所以在电气传动中获得了广泛应用。
本文从直流电动机的工作原理入手,建立了双闭环直流调速系统的数学模型,并详细分析了系统的原理及其静态和动态性能。
然后按照自动控制原理,对双闭环调速系统的设计参数进行分析和计算,利用Simulink对系统进行了各种参数给定下的仿真,通过仿真获得了参数整定的依据。
在理论分析和仿真研究的基础上,本文设计了一套实验用双闭环直流调速系统,详细介绍了系统主电路、反馈电路、触发电路及控制电路的具体实现。
对系统的性能指标进行了实验测试,表明所设计的双闭环调速系统运行稳定可靠,具有较好的静态和动态性能,达到了设计要求。
采用MATLAB软件中的控制工具箱对直流电动机双闭环调速系统进行计算机辅助设计,并用SIMULINK进行动态数字仿真,同时查看仿真波形,以此验证设计的调速系统是否可行.关键词直流电机直流调速系统速度调节器电流调节器双闭环系统仿真AbstractDC motor has been widely used in the area of electric drive because of its neatly adjustment, simple method and DC motor has been widely used in the area of electric drive because of its neatly adjustment, simple method and smooth control in a wide range, besides its control performance is excellent. Beginning with the theory of DC motor, this dissertation builts up the mathematic model of DC speed control system with double closed loops, detailedly discusses the static and dynamic state performance of the system. Afterward, according to automation theroy this papar calculates the parameters of the system. Then, this dissertation simulates and analyzes the system by means of Simulink. The results of simulation are consistent with theory calculation. Some experience was acquired through simulation. Based on the theory and simulation, this dissertation designs a DC speed control system with double closed loops, discusses the realization of main circuit, feedback circuit, control circuit and trigger circuit. The results of experiment show that the static and dynamic state performance of this system are good, which indicate that the design can meet the puter-aided analysis and design are carried out for speed-controlling system of the d-c motorby by using TOOL BOX and SIMULINK. Keywords: DC motor,DC governing system,speed governor,current governor,double loop control system,simulink目录摘要 (I)Abstract (II)第一章绪论 (1)1.1 直流调速概念 (1)1.2 直流调速系统的发展史 (1)1.3 研究双闭环直流调速系统的目的和意义 (2)1.4 本文的研究内容 (3)第二章直流调速系统 (4)2.1 直流调速系统的调速原理及性能指标 (4)2.1.1 直流调速系统的调速原理 (4)2.1.2 直流调速系统的性能指标 (4)2.1.3 动态性能指标 (6)2.2 电流、转速双闭环直流调速系统的理论分析 (7)2.2.1 双闭环调速的工作过程和原理 (7)2.2.2 双闭环直流调速系统的组成及其静特性 (8)2.3 双闭环直流调速系统的数学模型和动态性能分析 (11)2.3.1 双闭环直流调速系统的数学模型的建立 (11)2.3.2 起动过程分析 (11)2.3.3 动态抗干扰性分析 (15)2.4 调节器的工程设计方法 (15)2.4.1 PI调节器 (15)2.4.2 调节器的设计方法 (16)2.4.3Ⅰ型系统与Ⅱ型系统的性能比较 (16)2.4.4 转速-电流调节器结构的确定 (17)2.5 电流环、速度环的设计 (18)2.5.1 转速调节器、电流调节器在双闭环直流调速系统中的作用 (18)2.5.2 调节器的具体设计 (18)第三章 PWM脉宽调制 (22)3.1 PWM基本介绍 (22)3.2 脉宽调制变换器 (22)3.3 桥式可逆PWM变换器 (23)第四章直流电动机数学模型的建立 (26)4.1 数学模型的建立 (26)4.1.1 写出平衡方程式、拉普拉斯变换 (26)4.1.2 动态结构图 (27)4.2 本设计中电动机部分的数据采集和计算 (31)第五章双闭环直流调速系统仿真 (33)5.1 MATLAB简介 (33)5.2 双闭环调速系统的仿真 (33)结论 (36)致谢 (37)参考文献 (38)附录 (39)第一章绪论1.1 直流调速概念直流调速[1]是指人为地或自动地改变直流电动机的转速,以满足工作机械的要求。
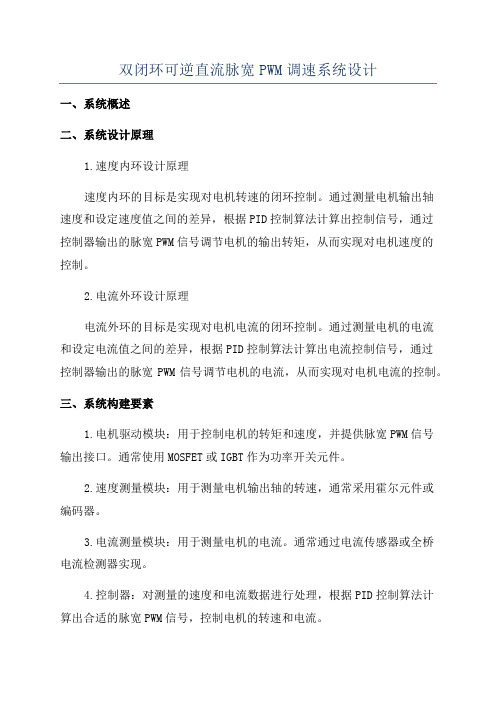
双闭环控制的直流脉宽调速系统(H桥)实验报告(2014)
正转时,闭环控制特性 n = f(Ug)
n(rpm)
1172 1100 1000 902 791 692 594
Ug(V)
4.06 3.78 3.41 3.07 2.69 2.35 2.02
反转时,闭环控制特性 n = f(Ug)
n(rpm)
1168 1096 997
Ug(V)
4.02 3.77 3.43
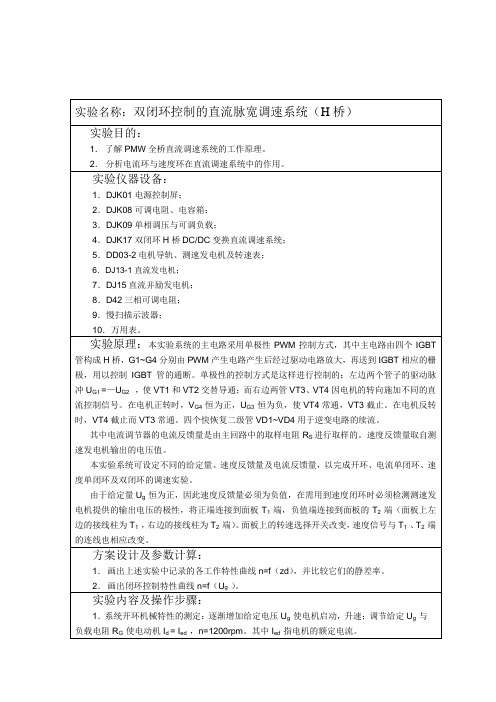
实验名称:双闭环控制的直流脉宽调速系统(H 桥)
实验目的:
1. 了解 PMW 全桥直流调速系统的工作原理。 2. 分析电流环与速度环在直流调速系统中的作用。
实验仪器设备:
1.DJK01 电源控制屏; 2.DJK08 可调电阻、电容箱; 3.DJK09 单相调压与可调负载; 4.DJK17 双闭环 H 桥 DC/DC 变换直流调速系统; 5.DD03-2 电机导轨、测速发电机及转速表; 6.DJ13-1 直流发电机; 7.DJ15 直流并励发电机; 8.D42 三相可调电阻; 9.慢扫描示波器; 10.万用表。
实验数据及结果:
系统的开环特性 n =f(Id)
n(rpm)
1130
Id(A)
0.9
1160 0.8
1190 0.7
1225 0.58
1265 0.45
1288 0.4
1300 0.37
电动机转速接近 n=l200rpm,闭环机械特性 n =f(Id)
n(rpm)
1168 1146 1116 1101
Ug 不变,改变 RG 使 Id 逐渐下降,测出相应的转速 n 及电流平均值 Id。 2.系统闭环特性的测定:将电流反馈量调节电位器调到最高端。 转向选择开关拨至“正向”,Ug >0,电动机启动后,测量测速发电机输出电压,将高电 位端接入速度反馈的 T1 端,低电位端接入 T2 端,以保证速度反馈为负值。 闭环机械特性的测定: 1) 调节给定 Ug 、转速反馈和电流反馈调节电位器使电机转速 n=1200rpm,这时 Un
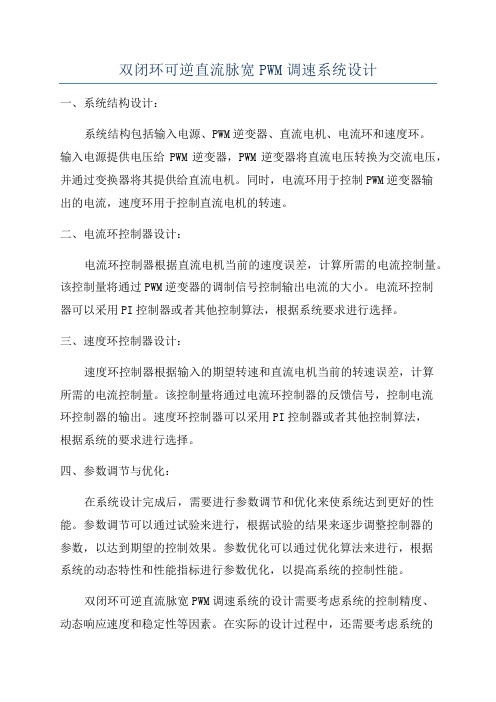
双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真验证

双闭环可逆直流脉宽PWM调速系统设计及MATLAB仿真验证双闭环可逆直流脉宽调制(PWM)调速系统是一种常见的电机调速控制方案。
该系统通过两个闭环来实现电机的速度控制和电流控制,从而实现精准的调速效果。
本文将介绍双闭环可逆直流脉宽PWM调速系统的设计原理,并使用MATLAB进行仿真验证。
设计原理:该系统由以下几个主要部分组成:1.输入信号:输入信号一般是一个速度设定值,表示期望电机的转速。
该信号可以通过人机界面或其他控制系统输入。
2.速度控制环:速度控制环根据输入信号和反馈信号之间的差异来控制电机的转速。
常见的速度控制算法有比例控制、积分控制和微分控制。
3.脉宽调制器:脉宽调制器根据速度控制环输出的控制信号来生成PWM信号,控制电机的转速。
通常使用的脉宽调制算法有定时器计数法和比较器法。
4.电流控制环:电流控制环根据PWM信号和反馈信号之间的差异来控制电机的电流。
常见的电流控制算法有比例控制、积分控制和微分控制。
5.电机驱动器:电机驱动器将电流控制环输出的控制信号转换为电机驱动信号,驱动电机正常运转。
MATLAB仿真验证:为了验证双闭环可逆直流脉宽PWM调速系统的性能,可以使用MATLAB进行仿真。
以下是一种基本的MATLAB仿真流程:1.定义电机模型:根据电机的参数和特性,定义一个数学模型来表示电机的动态响应,例如通过电机的转矩-转速曲线或电机的方程。
2.设计速度控制器:根据系统要求和电机模型,设计一个适当的速度控制器。
可以使用PID控制器或其他控制算法。
3.设计PWM调制器:根据速度控制器输出的控制信号,设计一个PWM调制器来生成PWM信号。
根据电机模型和控制要求,选择合适的PWM调制算法。
4.设计电流控制器:根据PWM信号和电机模型,设计一个电流控制器。
可以使用PID控制器或其他控制算法。
5. 仿真验证:将以上设计参数输入到MATLAB仿真模型中,并进行仿真验证。
可以使用Simulink工具箱来搭建仿真模型,并通过逐步增加负载或改变速度设定值等方式来验证系统的性能。
实验三 双闭环可逆直流脉宽调速系统

实验三双闭环可逆直流脉宽调速系统
实验目的:
1.掌握双闭环可逆直流脉宽调速系统的组成、原理及各主要单元部件的工作原理。
2.熟悉直流PWM专用集成电路SG3525的组成、功能与工作原理。
3.掌握双闭环可逆直流脉宽调速系统的调试步骤、方法及参数整定。
实验内容:
1.PWM控制器SG3525的性能测试。
2.控制单元调试。
3.测定开环和闭环机械特性n=f(Id)。
4.闭环控制特性n=f(Ug)的测定。
实验数据与分析
1.SG3525性能测试测试
示波器观察25端电压波形,开通时,T=105.5us,V=2.22v;关断时,T=52.5us,V=2.22v。
S5开关打向给定,30端输出波形,开通时,最大占空比0.5,最小0;关断时最大0.618,最小0。
2.控制电路测试
逻辑延时时间td=2.9us,VT1\VT2死区时间2.9us,VT3\VT4死区时间2.9us。
3.开环系统调试
系统开环机械特性测定
4.
5.系统静特性测试,
1.为了防坠上下桥臂直通,有人把上下桥臂驱动信号死区时间调的很大,这样做行不行,为什么?
你认为死区时间长短由哪些参数决定?
答:不行,死区长会影响输出波形失真,谐波成分增多。
死区时间长短与功率管自身的开通、关断时间以及对输出波形要求有关
2.与采用晶闸管的移相控制直流调速系统相对比,试归纳采用自关断器件的脉宽调速系统优点。
答:1.功率因素高,谐波污染小;2.主电路结构简单;3开关频率高,频带宽,响应速度和稳速精度好,电枢电流容易连续;4调速范围宽。
双闭环可逆直流脉宽PWM调速系统设计
双闭环可逆直流脉宽PWM调速系统设计一、系统概述二、系统设计原理1.速度内环设计原理速度内环的目标是实现对电机转速的闭环控制。
通过测量电机输出轴速度和设定速度值之间的差异,根据PID控制算法计算出控制信号,通过控制器输出的脉宽PWM信号调节电机的输出转矩,从而实现对电机速度的控制。
2.电流外环设计原理电流外环的目标是实现对电机电流的闭环控制。
通过测量电机的电流和设定电流值之间的差异,根据PID控制算法计算出电流控制信号,通过控制器输出的脉宽PWM信号调节电机的电流,从而实现对电机电流的控制。
三、系统构建要素1.电机驱动模块:用于控制电机的转矩和速度,并提供脉宽PWM信号输出接口。
通常使用MOSFET或IGBT作为功率开关元件。
2.速度测量模块:用于测量电机输出轴的转速,通常采用霍尔元件或编码器。
3.电流测量模块:用于测量电机的电流。
通常通过电流传感器或全桥电流检测器实现。
4.控制器:对测量的速度和电流数据进行处理,根据PID控制算法计算出合适的脉宽PWM信号,控制电机的转速和电流。
5.信号调理模块:用于对控制信号进行滤波和放大,以保证信号的稳定性和合理性。
6.反馈回路:将测量得到的电机速度和电流数据反馈给控制器,以实现闭环控制。
7.电源模块:为整个系统提供稳定的电源。
四、系统工作流程1.控制器通过速度测量模块获取电机的实际速度,并与设定速度进行比较计算出速度误差。
2.控制器通过电流测量模块获取电机的实际电流,并与设定电流进行比较计算出电流误差。
3.将速度误差和电流误差作为输入,经过PID控制算法计算出合适的脉宽PWM信号。
4.控制器将计算得到的脉宽PWM信号通过信号调理模块进行滤波和放大,然后输出到电机驱动模块。
5.电机驱动模块根据脉宽PWM信号的占空比调节电机的输出转矩和电流。
6.通过反馈回路将电机的实际速度和电流信息返回给控制器。
7.根据反馈信息对速度误差和电流误差进行修正,进一步优化脉宽PWM信号的计算。
双闭环直流调速系统实验

实验一 实验二 实验三 实验四 实验五实验五实验五 双闭环直流调速系统实验双闭环直流调速系统实验一.实验目的一.实验目的⒈ 熟悉双闭环直流调速系统的组成、工作原理、调试方法。
⒉ 了解双闭环直流调速系统的静态和动态特性。
二.实验设备二.实验设备⒈ MCL –⒈ MCL – 31 31 31 低压控制电路及仪表。
低压控制电路及仪表。
低压控制电路及仪表。
⒉ MCL –⒉ MCL – 32 32 32 电源控制屏。
电源控制屏。
电源控制屏。
⒊ MCL –⒊ MCL – 33 33 33 触发电路及晶闸管主回路。
触发电路及晶闸管主回路。
触发电路及晶闸管主回路。
⒋ MEL –⒋ MEL – 0303 03 三相可调电阻器。
三相可调电阻器。
三相可调电阻器。
⒌ MEL –⒌ MEL – 11 11 11 电容箱。
电容箱。
电容箱。
⒍ 直流电动机–发电机–测速机组。
⒍ 直流电动机–发电机–测速机组。
⒎ 万用表。
⒎ 万用表。
⒏ 双踪示波器。
⒏ 双踪示波器。
三.三. 实验原理实验原理在双闭环直流调速系统中设置了两个调节器,转速调节器的输出当作电流调节器的输入,电流调节器的输出控制晶闸管整流器的 触发装置。
触发装置。
电流调节器在里面称作内环,转速调节器在外面称作外环,这样就形成转速、电流双闭环调速系统。
双闭环直流调速系统原理图如下图所示。
速系统原理图如下图所示。
为了获得良好的静、动态性能,转速和电流两个调节器都采用采用 PI PI PI 调节器。
转速调节器是调速系统的主导调节器,它使转速跟随其给定电压变调节器。
转速调节器是调速系统的主导调节器,它使转速跟随其给定电压变化,稳态时实现转速无静差,对负载变化起抗扰作用,其输出限幅值决定电机允许的最大电流。
最大电流。
电流调节器电流调节器 使 电流紧紧跟随其电流紧紧跟随其 给定电压变化,对电网电压的波动起及时抗扰作用,在 转速动态过程中能够获得电动机允许的最大电流,从而加快动态过程, 当电机过载甚至堵转时,限制电枢电流的最大值,起快速的自动保护作用。
双闭环可逆直流脉宽PWM调速系统设计
双闭环可逆直流脉宽PWM调速系统设计一、系统结构设计:系统结构包括输入电源、PWM逆变器、直流电机、电流环和速度环。
输入电源提供电压给PWM逆变器,PWM逆变器将直流电压转换为交流电压,并通过变换器将其提供给直流电机。
同时,电流环用于控制PWM逆变器输出的电流,速度环用于控制直流电机的转速。
二、电流环控制器设计:电流环控制器根据直流电机当前的速度误差,计算所需的电流控制量。
该控制量将通过PWM逆变器的调制信号控制输出电流的大小。
电流环控制器可以采用PI控制器或者其他控制算法,根据系统要求进行选择。
三、速度环控制器设计:速度环控制器根据输入的期望转速和直流电机当前的转速误差,计算所需的电流控制量。
该控制量将通过电流环控制器的反馈信号,控制电流环控制器的输出。
速度环控制器可以采用PI控制器或者其他控制算法,根据系统的要求进行选择。
四、参数调节与优化:在系统设计完成后,需要进行参数调节和优化来使系统达到更好的性能。
参数调节可以通过试验来进行,根据试验的结果来逐步调整控制器的参数,以达到期望的控制效果。
参数优化可以通过优化算法来进行,根据系统的动态特性和性能指标进行参数优化,以提高系统的控制性能。
双闭环可逆直流脉宽PWM调速系统的设计需要考虑系统的控制精度、动态响应速度和稳定性等因素。
在实际的设计过程中,还需要考虑系统的成本和可行性等因素。
在设计完成后,还需要进行系统的实验验证,以确定系统是否满足设计要求,并进行必要的修改和改进。
总之,双闭环可逆直流脉宽PWM调速系统的设计是一个复杂的过程,需要综合考虑系统的各个方面因素,并进行系统的参数调节和优化。
只有设计合理、参数优化的系统才能提高直流电机的控制性能和精度。
双闭环可逆直流脉宽调速系统实验详细

双闭环可逆直流脉宽调速系统一.实验目的1.掌握双闭环可逆直流脉宽调速系统的组成、原理及各主要单元部件的工作原理。
2.熟悉直流PWM专用集成电路SG3525的组成、功能与工作原理。
3.熟悉H型PWM变换器的各种控制方式的原理与特点。
4.掌握双闭环可逆直流脉宽调速系统的调试步骤、方法及参数的整定。
二.实验内容1.PWM控制器SG3525性能测试。
2.控制单元调试。
3.系统开环调试。
4.系统闭环调试5.系统稳态、动态特性测试。
6.H型PWM变换器不同控制方式时的性能测试。
三.实验系统的组成和工作原理泛应用。
IGBT所构成的H型结构形式,UPW四.实验设备及仪器1.NMCL系列教学实验台主控制屏。
2.NMCL—18组件3.NMCL—31A组件4.NMCL-22挂箱6.M MEL—13组件。
7.直流电动机M03。
8.双踪示波器。
五.注意事项1.直流电动机工作前,必须先加上直流激磁。
2.接入ASR构成转速负反馈时,为了防止振荡,可预先把ASR的RP3电位器逆时针旋到底,使调节器放大倍数最小,同时,ASR的“5”、“6”端接入可调电容(预置7μF)。
3.测取静特性时,须注意主电路电流不许超过电机的额定值(1A)。
4.系统开环连接时,不允许突加给定信号U g起动电机。
5.起动电机时,需把MMEL-13的测功机加载旋钮逆时针旋到底,以免带负载起动。
6.改变接线时,必须先按下主控制屏总电源开关的“断开”红色按钮,同时使系统的给定为零。
7.双踪示波器的两个探头地线通过示波器外壳短接,故在使用时,必须使两探头的地线同电位(只用一根地线即可),以免造成短路事故。
8.实验时需要特别注意起动限流电路的继电器有否吸合,如该继电器未吸合,进行过流保护电路调试或进行加负载试验时,就会烧坏起动限流电阻。
9.系统整定要求满足超调量小于5%,调节时间小于3秒。
六.实验方法1.SG3525及控制电路性能测试(1)调节UPW单元的RP电位器使输出波形的占空比为二分之一,UPW的2端与DLD单元的1相连,按下S1开关,检查G1E1,,G2E2,G3E3,G4E2之间的波形是否正常2.开环系统调试按图5-19接线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验三双闭环可逆直流脉宽调速系统
实验目的:
1.掌握双闭环可逆直流脉宽调速系统的组成、原理及各主要单元部件的工作原理。
2.熟悉直流PWM专用集成电路SG3525的组成、功能与工作原理。
3.掌握双闭环可逆直流脉宽调速系统的调试步骤、方法及参数整定。
实验内容:
1.PWM控制器SG3525的性能测试。
2.控制单元调试。
3.测定开环和闭环机械特性n=f(ld)。
4•闭环控制特性n=f(Ug)的测定。
实验数据与分析
1.SG3525性能测试测试
示波器观察25端电压波形,开通时,T=105.5us V=2.22v;关断时,T=52.5us V=2.22v。
S5开关打向给定,30端输出波形,开通时,最大占空比0.5,最小0;关断时最大0.618,最小0 2.控制电路测试
逻辑延时时间td=2.9us, VT1WT2死区时间2.9us, VT3WT4死区时间2.9us。
3.开环系统调试
系统开环机械特性测定
正给定
负给定
4.闭环系统调试
5.
负给定
闭环控制特性正给定
负给定
思考题1.为了防坠上下桥臂直通,有人把上下桥臂驱动信号死区时间调的很大,这样做行不行,为什么? 你认为死区时间长短由哪些参数决定?答:不行,死区长会影响输出波形失真,谐波成分增多。
死区时间长短与功率管自身的开通、关断时间以及对输出波形要求有关
2.与采用晶闸管的移相控制直流调速系统相对比,试归纳采用自关断器件的脉宽调速系统优点。
答:1.功率因素高,谐波污染小;2•主电路结构简单;3开关频率高,频带宽,响应速度和稳速精度好,电枢电流容易连续;4调速范围宽。