基于MATLAB的摆动导杆机构仿真
基于MATLABSIMULINK的插床导杆机构运动学和动力学分析1
基于MATLABSIMULINK的插床导杆机构运动学和动力学分析1基于MATLABSIMULINK的插床导杆机构运动学和动力学分析1插床导杆机构是一种常用于工业自动化中的机构,用于实现工件的夹持和定位。
该机构包括固定在机床上的床身、在床身上滑动的导轨和固定在导轨上的插块。
插块通过导杆与导轨相连,从而可以在导轨上沿水平方向移动。
在这个系统中,我们感兴趣的是插块的运动学和动力学分析。
首先,我们将利用MATLABSIMULINK的建模工具箱来建立插床导杆机构的运动学模型。
运动学模型描述了机构中各个部件的运动关系。
我们可以使用MATLABSIMULINK的基本几何构件,如块、源和终端等,来建立导杆机构的运动学模型。
假设我们已经测量了导杆的长度和导块的位置,并且我们还知道导杆与导轨之间的摩擦系数。
我们可以使用MATLABSIMULINK的代数运算器来计算导块的位移和速度。
在动力学分析中,我们可以利用MATLAB SIMULINK的自动求解器来求解导块在机构中的力学方程。
这些力学方程可以通过牛顿第二定律得到,即F=ma,其中F是力,m是质量,a是加速度。
我们可以使用MATLABSIMULINK的物理系统建模工具箱来建立机械系统的动力学模型。
该工具箱包含了众多应用于机械系统的物理模块,如质量、弹簧和阻尼器等。
通过建立机械系统的动力学模型,我们可以确定导块在机构中所受的力和扭矩。
对于这个系统,我们可以进一步使用MATLABSIMULINK的力学仿真工具来模拟导块在机构中的运动。
在仿真过程中,我们可以改变不同的系统参数,如导杆的长度和导块的质量,以研究它们对机构性能的影响。
此外,我们还可以模拟不同的工作条件,如不同的工件质量和工件的夹持力。
综上所述,基于MATLABSIMULINK的插床导杆机构的运动学和动力学分析提供了一个强大的工具,用于研究机构的运动性能和设计优化。
通过使用MATLABSIMULINK的建模和仿真功能,我们可以更好地理解和改进机构的性能。
基于MATLAB的六杆机构动力学分析与仿真

六杆机构的动力学分析仿真一系统模型建立为了对机构进行仿真分析,首先必须建立机构数学模型,即位置方程,然后利用MATLAB仿真分析工具箱Simulink对其进行仿真分析。
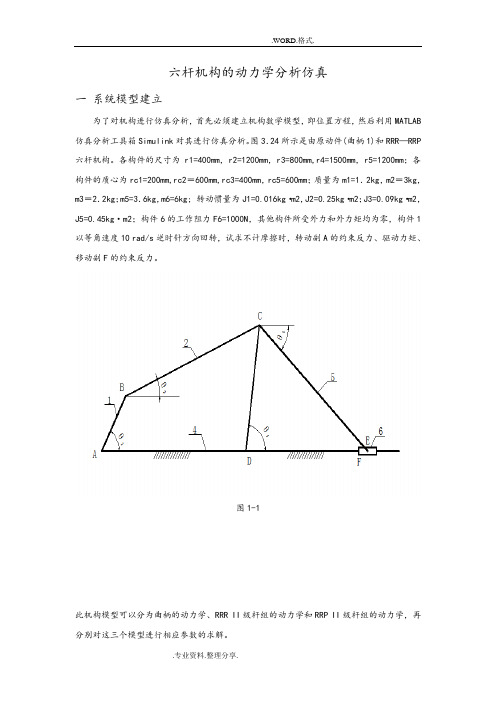
图3.24所示是由原动件(曲柄1)和RRR—RRP六杆机构。
各构件的尺寸为r1=400mm,r2=1200mm,r3=800mm,r4=1500mm,r5=1200mm;各构件的质心为rc1=200mm,rc2=600mm,rc3=400mm,rc5=600mm;质量为m1=1.2kg,m2=3kg,m3=2.2kg;m5=3.6kg,m6=6kg; 转动惯量为J1=0.016kg·m2,J2=0.25kg·m2;J3=0.09kg·m2,J5=0.45kg·m2;构件6的工作阻力F6=1000N,其他构件所受外力和外力矩均为零,构件1以等角速度10 rad/s逆时针方向回转,试求不计摩擦时,转动副A的约束反力、驱动力矩、移动副F的约束反力。
图1-1此机构模型可以分为曲柄的动力学、RRR II级杆组的动力学和RRP II级杆组的动力学,再分别对这三个模型进行相应参数的求解。
图1-2 AB 构件受力模型如上图1-2对于曲柄AB 由理论力学可以列出表达式:111XA Re R ••=+-s m F R X XB 111y A Im R ••=+-s m F R y yB1111111111111cos )(sin )(cos sin ••=---+-++θθθθθJ r r R r r R r R r R M M c yB c XB c yA c XA F由运动学知识可以推得:)cos()2/cos(Re Re 12111111πθθπθθ++++=•••••••c c r r A s )sin()2/sin(Im Im 12111111πθθπθθ++++=•••••••c c r r A s将上述各式合并成矩阵形式有,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-+++++-++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡••••••••••g m R F r m r m A m R F r m r m A m M R R yB y c c XBX c c yA XA 111211111111112111111111)sin()2/sin(Im )cos()2/cos(Re πθθπθθπθθπθθ(1-21)如图1-3,对构件BC 的约束反力推导如下,图1-3 BC 构件受力模型222Re ••=++s m R F R XC X XB 2222Im ••=-++s m g m R F R yC y yB2222222222222cos )(sin )(cos sin ••=-----+θθθθθJ r r R r r R r R r R M c yC c XC c yB c XB如图1-4,对构件BC 的约束反力推导如下,图 1-4 CD 构件受力模型333Re ••=-+s m R F R XC X XD 3333Im ••=-++s m g m R F R yC y yD3333333333333cos )(sin )(cos sin ••=-----+θθθθθJ r r R r r R r R r R M c yC c XC c yD c XD由运动学可以推导得,)sin()2/sin(Im Im 22222222πθθπθθ++++=•••••••c c r r B s )cos()2/cos(Re Re 22222222πθθπθθ++++=•••••••c c r r B s )cos()2/cos(Re Re 32333333πθθπθθ++++=•••••••c c r r D s )sin()2/sin(Im Im 32333333πθθπθθ++++=•••••••c c r r D s将上述BC 构件,CD 构件各式合并成矩阵形式有,⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡----------33333333332222222222cos sin cos )(sin )(0010100001010000cos )(sin )(cos sin 001010000101θθθθθθθθc c c c c c c c r r r r r r r r r r r r ⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡yD XD yC XC yB XB R R R R R R =⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-+-++++-++++-+-++++-++++••••••••••••••••••••••••3333332333333333323333333322222222222222222222222222)sin()2/sin(Im )cos()2/cos(Re )sin()2/sin(Im )cos()2/cos(Re M J g m F r m r m D m F r m r m D m M J g m F r m r m B m F r m r m B m y c c X c c y c c X c c θπθθπθθπθθπθθθπθθπθθπθθπθθ (1-22)如图1-5 对构件5进行约束反力的推导如下,图1-5 CE 杆件受力模型••=++s m R F R xE x xC Re 55 ••=-++s m g m R F R yE y yC Im 5555555555555555cos )(sin )(cos sin ••=-+-+--θθθθθJ r r R r r R r R r R M c yE c xE c yC c xC如图1-6 对滑块进行受力分析如下,滑块受力模型••=--E m R R F F xE x Re sin 666θ ••=-+-E m g m R R F F yE y Im cos 6666θ由运动学可推,)cos()2/cos(C Re Re 5255555πθθπθθ•••••••+++=c c r r s )sin()2/sin(C Re Im 5255555πθθπθθ•••••••+++=c c r r s66cos Re θ••••=s E 66sin Im θ••••=s E⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+---+-++++-++++=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-------••••••••••••••••g m F s m F s m M J g m F r m r m m F r m r m m R R R R R r r r r r r y x y c c x c c F yE xE yC xC c c c c 66666666655555525555555555255555555665555555555sin cos )sin()2/sin(C Re )cos()2/cos(C Re cos 1000sin 01000cos )(sin )(cos sin 010*******θθθπθθπθθπθθπθθθθθθθθ(1-23)二编程与仿真利用MATLAB进行仿真分析,主要包括两个步骤:首先是编制计算所需要的函数模块,然后利用其仿真工具箱Simulink建立仿真系统框图,设定初始参数进行仿真分析。
摆动导杆机构的Matlab运动学仿真
Vol 21 No 2008202
p lot ( simout (: , 1) , simout (: , 4) , simout (: , 1) , si2 mout(: , 5) )
p lot ( simout (: , 1 ) , simout (: , 7 ) , simout (: , 1 ) , simout (: , 8) )
% u (6) = r3
% u (7) = theta3
r1 = 1000; r2 = 400;
%
a = [ cos ( u ( 7 ) ) - u ( 6 ) 3 sin ( u ( 7 ) ) ; sin ( u
(7) ) u (6) 3 cos ( u (7) ) ];
b = [ - u ( 1) 3 r2 3 sin ( u ( 5) ) - r2 3 u ( 2) ^2 3
cos( u (5) ) + 2 3 u ( 3) 3 u ( 4) 3 sin ( u ( 7 ) )
+ u (6) 3 u (4) ^23 cos( u (7) ) ;
u (1) 3 r2 3 cos ( u ( 5 ) ) - r2 3 u ( 2 ) ^2 3 sin ( u
(5) ) - 2 3 u ( 3) 3 u ( 4) 3 cos ( u ( 7 ) ) + u
M atlab是目前国际上广泛使用的一种功能强大的数
MATLAB_Simulink软件的曲柄导杆机构运动学仿真

[研究・设计]收稿日期:2007204209作者简介:赵小刚(1981-),男,陕西户县人,助教,主要研究方向为机械工程CAD CAM 。
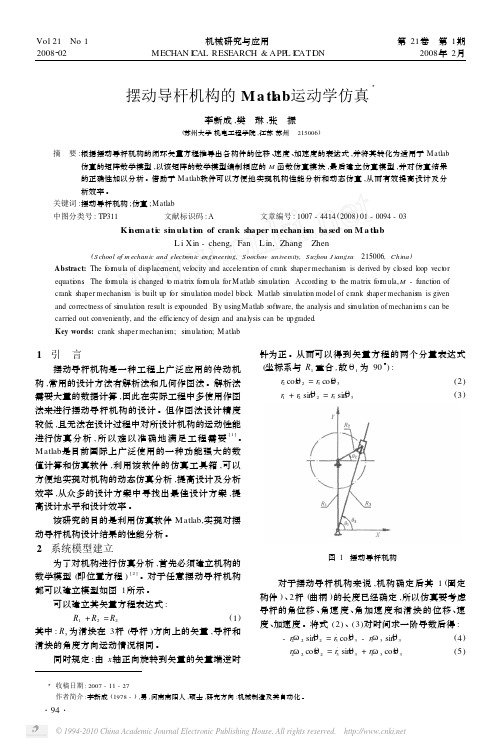
MA TLAB S i m ulink 软件的曲柄导杆机构运动学仿真赵小刚1,李永春2 (1.陕西国防工业职业技术学院机械系,陕西户县 710302; 2.陕西科技大学机电工程学院,陕西西安 710021) 摘 要:为了求解曲柄导杆机构的运动学规律,运用矢量法进行了分析,建立了曲柄导杆机构的运动学数学模型。
使用M A TLAB Si m ulink 仿真软件对曲柄导杆机构进行了运动学仿真,得到了导杆及滑块的位移、速度、加速度的运动曲线。
使用这种方法求解机构的运动学参数具有精度高、速度快等特点。
关 键 词:曲柄导杆机构;运动学;M A TLAB Si m ulink 软件;仿真中图分类号:TH 112;T P 391.9 文献标志码:A 文章编号:100522895(2007)06200392030 引 言曲柄导杆机构是一种应用比较广泛的平面连杆机构,它可以将曲柄的旋转运动转换成为导杆的往复摆动(摆动导杆机构)或整周旋转运动(转动导杆机构)[1]。
曲柄导杆机构还可以与别的基本四杆机构组合在一起,构成一些实用的组合机构,如刨床,车床的主运动机构等。
机构的运动参数是分析评价机构工作性图1 曲柄摆动导杆机构简图能,优化新机构的基本依据[2]。
对曲柄导杆机构的运动分析,即构件上特定点的位移、速度和加速度分析,常用的方法有图解法和解析法。
图解法较直观、方便,但是精度不高,需要反复作图;而解析法人工计算运算量大,容易出错[3]。
本文以曲柄摆动导杆为例,提出用M A TLAB 软件仿真工具箱Si m u link 对曲柄导杆机构进行运动学仿真,得到曲柄导杆机构的运动曲线,该方法使解析法获得更高的精度。
1 曲柄摆动导杆机构运动学数学模型的建立图1所示为一曲柄摆动导杆机构,曲柄OA 为原动件,导杆B A 是从动件,通过滑块,曲柄的连续转动转变为导杆的往复摆动。
基于MATLAB的六杆机构动力学分析和仿真
六杆机构的动力学分析仿真一系统模型建立为了对机构进行仿真分析,首先必须建立机构数学模型,即位置方程,然后利用MATLAB 仿真分析工具箱Simulink对其进行仿真分析。
图3.24所示是由原动件(曲柄1)和RRR—RRP 六杆机构。
各构件的尺寸为r1=400mm,r2=1200mm,r3=800mm,r4=1500mm,r5=1200mm;各构件的质心为rc1=200mm,rc2=600mm,rc3=400mm,rc5=600mm;质量为m1=1.2kg,m2=3kg,m3=2.2kg;m5=3.6kg,m6=6kg; 转动惯量为J1=0.016kg·m2,J2=0.25kg·m2;J3=0.09kg·m2,J5=0.45kg·m2;构件6的工作阻力F6=1000N,其他构件所受外力和外力矩均为零,构件1以等角速度10 rad/s逆时针方向回转,试求不计摩擦时,转动副A的约束反力、驱动力矩、移动副F的约束反力。
图1-1此机构模型可以分为曲柄的动力学、RRR II级杆组的动力学和RRP II级杆组的动力学,再分别对这三个模型进行相应参数的求解。
图1-2 AB 构件受力模型如上图1-2对于曲柄AB 由理论力学可以列出表达式:111XA Re R ∙∙=+-s m F R X XB 111y A Im R ∙∙=+-s m F R y yB1111111111111cos )(sin )(cos sin ∙∙=---+-++θθθθθJ r r R r r R r R r R M M c yB c XB c yA c XA F由运动学知识可以推得:)cos()2/cos(Re Re 12111111πθθπθθ++++=∙∙∙∙∙∙∙c c r r A s )sin()2/sin(Im Im 12111111πθθπθθ++++=∙∙∙∙∙∙∙c c r r A s将上述各式合并成矩阵形式有,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-+++++-++++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡∙∙∙∙∙∙∙∙∙∙g m R F r m r m A m R F r m r m A m M R R yB y c c XBX c c yA XA 111211111111112111111111)sin()2/sin(Im )cos()2/cos(Re πθθπθθπθθπθθ(1-21)如图1-3,对构件BC 的约束反力推导如下,图1-3 BC 构件受力模型222Re ∙∙=++s m R F R XC X XB 2222Im ∙∙=-++s m g m R F R yC y yB2222222222222cos )(sin )(cos sin ∙∙=-----+θθθθθJ r r R r r R r R r R M c yC c XC c yB c XB如图1-4,对构件BC 的约束反力推导如下,图 1-4 CD 构件受力模型333Re ∙∙=-+s m R F R XC X XD 3333Im ∙∙=-++s m g m R F R yC y yD3333333333333cos )(sin )(cos sin ∙∙=-----+θθθθθJ r r R r r R r R r R M c yC c XC c yD c XD由运动学可以推导得,)sin()2/sin(Im Im 22222222πθθπθθ++++=∙∙∙∙∙∙∙c c r r B s )cos()2/cos(Re Re 22222222πθθπθθ++++=∙∙∙∙∙∙∙c c r r B s )cos()2/cos(Re Re 32333333πθθπθθ++++=∙∙∙∙∙∙∙c c r r D s )sin()2/sin(Im Im 32333333πθθπθθ++++=∙∙∙∙∙∙∙c c r r D s将上述BC 构件,CD 构件各式合并成矩阵形式有,⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡----------33333333332222222222cos sin cos )(sin )(0010100001010000cos )(sin )(cos sin 001010000101θθθθθθθθc c c c c c c c r r r r r r r r r r r r ⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡yD XD yC XC yB XB R R R R R R =⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-+-++++-++++-+-++++-++++∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙3333332333333333323333333322222222222222222222222222)sin()2/sin(Im )cos()2/cos(Re )sin()2/sin(Im )cos()2/cos(Re M J g m F r m r m D m F r m r m D m M J g m F r m r m B m F r m r m B m y c c X c c y c c X c c θπθθπθθπθθπθθθπθθπθθπθθπθθ (1-22)如图1-5 对构件5进行约束反力的推导如下,图1-5 CE 杆件受力模型∙∙=++s m R F R xE x xC Re 55 ∙∙=-++s m g m R F R yE y yC Im 5555555555555555cos )(sin )(cos sin ∙∙=-+-+--θθθθθJ r r R r r R r R r R M c yE c xE c yC c xC如图1-6 对滑块进行受力分析如下,滑块受力模型∙∙=--E m R R F F xE x Re sin 666θ ∙∙=-+-E m g m R R F F yE y Im cos 6666θ由运动学可推,)cos()2/cos(C Re Re 5255555πθθπθθ∙∙∙∙∙∙∙+++=c c r r s )sin()2/sin(C Re Im 5255555πθθπθθ∙∙∙∙∙∙∙+++=c c r r s66cos Re θ∙∙∙∙=s E 66sin Im θ∙∙∙∙=s E⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+---+-++++-++++=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-------∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙g m F s m F s m M J g m F r m r m m F r m r m m R R R R R r r r r r r y x y c c x c c F yE xE yC xC c c c c 66666666655555525555555555255555555665555555555sin cos )sin()2/sin(C Re )cos()2/cos(C Re cos 1000sin 01000cos )(sin )(cos sin 010*******θθθπθθπθθπθθπθθθθθθθθ(1-23)二编程与仿真利用MATLAB进行仿真分析,主要包括两个步骤:首先是编制计算所需要的函数模块,然后利用其仿真工具箱Simulink建立仿真系统框图,设定初始参数进行仿真分析。
MATLAB基本杆组-运动学仿真

⎡ ri cos (θ i + π ) ⎤ 2 ⎡ xC ⎤ ⎡ xB ⎤ ⎡ ri cos (θ i + π 2 ) ⎤ ⎢ y ⎥ = ⎢ y ⎥ + ⎢ r sin θ + π 2 ⎥ θi + ⎢ r sin θ + π ⎥ θi ( i )⎦ ⎣ i ( i )⎦ ⎣ C⎦ ⎣ B⎦ ⎣ i
xC = xB − riθi sin (θi ) = xD − rjθ j sin (θ j ) yC = yB + riθi cos (θi ) = yD + rjθ j cos (θ j )
再次对时间t求导数,得到点C的加速度为
xC = xB − riθi sin (θi ) − riθi2 cos (θi ) = xD − rjθ j sin (θ j ) − rjθ j2 cos (θ j ) yC = yB + riθi cos (θi ) − riθi2 sin (θi ) = yD + rjθ j cos (θ j ) − riθ i2 sin (θ j )
( (
) )
§5-1 曲柄的MATLAB运动学仿真模块
xB = ri cos (θi ) + rj cos (θ j ) yB = ri sin (θi ) + rj sin (θ j )
对时间分别求两次导数
xB = − rjθ j sin (θ j ) xB = − rjθ j sin (θ j ) − rjθ j2 cos (θ j )
求导数
−riθi sin (θi ) + rjθ j sin (θ j ) = xD − xB riθi cos (θi ) − rjθ j cos (θ j ) = yD − yB
基于MATLAB的双摇杆机构运动分析与仿真模板
本科生毕业设计基于MATLAB的双摇杆机构运动分析与仿真Based on the MATLAB double rocker organization movement analysis and simulation基于MATLAB/SIMULINK的双摇杆机构运动学分析与仿真邹凯旋云南农业大学工程技术学院,昆明黑龙潭650201摘要平面连杆机构的应用十分广泛,它的分析及设计一直是机构学研究的一个重要课题。
MATLAB的Simulink是一个对动态系统建模和仿真分析的软件包,为信号与系统仿真实验提供了很好的平台。
借助其强大的模拟仿真分析功能可以方便的实现机构性能分析和动态仿真,降低分析的难度,有效提高设计工作效率、产品开发质量、降低开发成本。
本设计课题以MATLAB的simulink\simMechanics 动态模拟仿真工具为平台,对双摇杆机构进行运动分析。
结果表明该仿真方法能方便、准确的得到机构的运动、动力数据,能为机构的选择、优化设计提供参考依据。
应用此工具可很好地对机械系统的各种运动进行分析,构造出平面连杆机构的数学模型。
通过对此数学模型分析,分离出可独立求解的机构模型,并用相应的机构分析方法对它进行求解,建立了平面连杆机构运动学分析专家系统。
系统可完成部分平面连杆机构的运动学分析及动画仿真,从而为机械系统的建模仿真提供一个强大而方便的工具。
关键词:连杆机构;动态仿真;SimMechanics;数学模型Based on the MATLAB double rocker organizationmovement analysis and simulationZou kaixuanFaculty of Engineering and Technology Yunan Agricultural University,HeilongtanKunming 650201ABSTRACTPlanar linkage mechanism used widely, its analysis and design of the study of institutions has been an important subject. MATLAB Simulink is a dynamic system modeling and simulation software package, for signal and system simulation results provide a good platform. With its powerful simulation analysis function is realized the performance analysis and the dynamic simulation institutions, reduce the difficulties of analysis, effectively improve the design work efficiency and product development quality, reduce development costs. This design task to MATLAB simulink \ simMechanics dynamic simulation tools as the platform, on the double rocker organization motion analysis. The results show that the simulation method can conveniently, accurately to get the kinematic and dynamic data organization, for the choice of institutions, optimum design to provide the reference. This tool can application is mechanical system analysis of all kinds of sports, constructed the mathematical model of the planar linkage mechanism. Through mathematical model to analysis, separating out can be independent of solving mechanism model, and the corresponding institutions analysis method to solve it, a planar linkage mechanism kinematic analysis of the expert system. System can finish part of planar linkage mechanism kinematic analysis and animated simulation, thus for mechanical system modeling simulation provide a strong and convenient tool.Key words: linkage;Dynamic Simulation;SimMechanics;mathematical model目录摘要 (Ⅰ)ABSTRACT (Ⅱ)目录 (Ⅳ)图目录 (Ⅴ)公式目录 (Ⅴ)前言 (1)一、概述 (1)1. 双摇杆机构的相关知识 (1)2. 双摇杆机构的运动学分析传统方法 (1)3. 用软件进行机构运动学分析的现状和趋势 (2)4. 使用MATLAB/SIMULINK的优势 (2)5. MATLAB/SIMLINK的特点 (3)二、设计任务分析 (3)1. 设计内容和任务 (3)2. 实现技术路线 (4)3. 关键问题和难点分析 (5)三、程序设计与实现 (5)1. 系统组成 (6)2. 程序设计与实现 (6)3. 基于运动学的模型建立 (7)4. 参数化设计 (9)5. 仿真结果 (14)四、设计结果分析 (15)1. 软件的使用方法 (15)2. 存在的缺点和今后改进的方向 (16)五、设计心得 (16)参考文献 (18)致谢 (19)图目录图1-1双摇杆机构 (1)图1-2鹤式起重机 (1)图2-1实现的流程图 (5)图2-2双摇杆机构运动简图 (5)图3-1 Simulink界面 (6)图3-2new model (7)图3-3SimMechanics (7)图3-4 bodies (7)图3-5Joints (8)图3-6Sensors Actuators (8)图3-7双摇杆机构仿真模型图 (9)图3-8Ground模块 (9)图3-9evolute模块 (10)图3-10bodyAB模块 (10)图3-11bodyBC模块 (11)图3-12bodyCD模块 (11)图3-13Joint Seneor模块 (12)图3-14Joint Initial Condition模块 (12)图3-15Scope模块 (12)图3-16机械环境模块 (13)图3-17命令窗口参数输入 (14)图3-18仿真结果的动画显示 (14)图3-19位置图、速度图、加速度图 (15)一、概述1.双摇杆机构的相关知识在双摇杆机构中,两摇杆均可作主动件。
基于MATLAB的旋转倒立摆建模和控制仿真

倒立摆系统作为一个被控对象具有非线性、强耦合、欠驱动、不稳定等典型特点,因此一直被研究者视为研究控制理论的理想平台,其作为控制实验平台具有简单、便于操作、实验效果直观等诸多优点。
倒立摆具有很多形式,如直线倒立摆、旋转倒立摆、轮式移动倒立摆等等。
其中,旋转倒立摆本体结构仅由旋臂和摆杆组成,具有结构简单、空间布置紧凑的优点,非常适合控制方案的研究,因此得到了研究者们广泛的关注[1-2]。
文献[3]介绍了直线一级倒立摆的建模过程,并基于MATLAB 进行了仿真分析;文献[4]通过建立倒立摆的数学模型,采用MATLAB 研究了倒立摆控制算法及仿真。
在倒立摆建模、仿真和研究中大多数研究者常用理论建模方法,也可以利用SimMechanics 搭建三维可视化模型仿真;文献[5]使用SimMechanics 工具箱建立旋转倒立摆物理模型,通过极点配置、PD 控制和基于线性二次型控制实现了倒立摆的平衡控制;文献[6]通过设计的全状态观反馈控制器来实现单极旋转倒立摆SimMechanics 模型控制,表明了SimMechanics 可用于不稳定的非线性系统;文献[7]通过单级倒立摆SimMechanics 仿真,研究了Bang-Bang 控制和LQR 控制对倒立摆的自起摆和平衡控制;文献[8]基于Sim⁃Mechanics 建立了直线六级倒立摆模型,并基于LRQ 设计状态反馈器进行了仿真控制分析。
本文首先采用Lagrange 方法建立了旋转倒立摆的动力学模型,在获得了旋转倒立摆动力学微分方程后建立了s-func⁃tion 仿真模型;然后,本文采用SimMechanics 建立了旋转的可视化动力学模型。
针对两种动力学模型,采用同一个PID 控制器进行了控制,从控制结果可以看出两种模型的响应曲线完全一致,这两种模型相互印证了各自的正确性。
1旋转倒立摆系统的动力学建模旋转倒立摆是由旋臂和摆杆构成的系统,如图1所示,旋臂绕固定中心旋转(角度记为θ)带动摆杆运动,摆杆可以绕旋臂自由转动,角度记为α。