实验四 霍尔式传感器的静态位移特性—直流激励
霍尔式传感器实验

霍尔式传感器实验实验目的1.了解霍尔式传感器的结构、工作原理。
2.了解霍尔式传感器在直流激励下的特性。
3.了解霍尔式传感器在交流激励下的特性。
4.通过实验了解霍尔式传感器在振动测量中的应用。
实验原理霍尔式传感器是由两个环形磁钢组成的梯度磁场和位于磁场中的霍尔元件组成,当霍尔元件通以恒定电流时,霍尔元件就有电势输出,霍尔元件在梯度磁场中上、下移动时,输出的霍尔电势V取决于其在磁场中的位移量X,所以测得霍尔电势的大小便可获知霍尔元件的静位移。
实验仪器CSY10B型传感器系统实验仪(直流稳压电源(±2V档)、电桥、霍尔式传感器、差动放大器、数字电压/频率表、螺旋测微仪、音频振荡器、移相器、相敏检波器、低通滤波器、振动圆盘)、砝码(20克/个)、示波器等。
实验内容与步骤一、霍尔式传感器的直流激励特性图(1)1.按图(1)接线,装上螺旋测微仪,调节振动圆盘上、下位移,使霍尔元件位于梯度磁场中间位置,差动放大器增益适度。
2.开启仪器电源,调节电桥“W D”电位器,使系统输出为零,上、下移动振动圆盘,使系统输出电压正负对称。
3.以系统输出为零作为起点,上、下移动测微头各3.5mm,每变化0.5mm读取相应的电压值。
并记入下表,作出V-X曲线,求出灵敏度及线性度。
1.直流激励电压须严格限定在2V,绝对不能任意加大,以免损坏霍尔元件。
二、霍尔式传感器的交流激励特性图(2)1.按图(2)接线组成测试系统,差动放大器增益适度,装上螺旋测微仪,调整霍尔元件至梯度磁场中间位置,音频振荡器从180°输出端输出,频率为1KHZ,幅度严格限定在Vρ-ρ值5V以下,以免损坏霍尔元件。
2.用示波器观察相敏检波器输出端③波形,调节“移相”旋钮,当振动圆盘在最上、最下位置时,使输出达最大值并正负对称,然后使霍尔元件位于磁场中间位置并调整电桥W D、W A电位器使系统输出为零。
3.旋动螺旋测微仪使霍尔元件上下位置移动,读出相应X——V值。
霍尔传感器的直流激励特性实验报告误差分析

霍尔传感器的直流激励特性实验报告误差分析
霍尔传感器是用来检测磁场的一种传感器,它可以通过感知磁场的变化来测量物体的位置、速度等。
在实验中,为了使霍尔传感器正常工作,需要给它提供一定的激励电压,这个激励电压的大小和稳定性对实验的准确性有很大的影响。
一般来说,霍尔传感器的直流激励特性实验可以分为两个部分:测量霍尔传感器的输出电压与激励电压的关系,以及测量霍尔传感器的稳定性。
其中,第一个部分是为了确定霍尔传感器的灵敏度,即输出电压与磁场的关系,第二个部分是为了确定霍尔传感器的长期稳定性。
误差分析:
1. 激励电压的稳定性不够:
在实验中,如果激励电压的波动比较大,就会导致输出电压的误差增大。
这种误差可以通过采用稳压电源或者其他控制电压波动的方法来减小。
2. 测量电路的误差:
测量电路也会对实验结果产生误差,如放大器的增益不稳定、滤波器的频率响应不均匀等。
可以通过对测量电路进行校准来减小误差。
3. 环境磁场的影响:
周围的磁场也会对实验结果产生误差,特别是在霍尔传感器接近物体时,物体本身的磁场会对测量产生影响。
可以采取屏蔽措施或者在实验中消除这些影响。
4. 对原始数据处理的误差:
在对实验数据进行处理时,可能会出现计算误差、单位转换误差等。
这些误差可以通过实验操作的规范、数据记录的精准和对数据处理的细心来减小。
综上所述,要减小霍尔传感器的直流激励特性实验的误差,需要在实验设计、实验操作、数据处理等方面都保证科学合理性和准确性,并且提高对实验中各种误差来源的识别和防范能力。
(整理)实验四 霍尔式传感器的静态位移特性—直流激励.

南昌大学实验报告学生姓名: 学 号: 专业班级: 实验类型:□ 验证 □ 综合 □ 设计 □ 创新 实验日期: 实验成绩:实验四 霍尔式传感器的静态位移特性—直流激励实验目的:了解霍尔式传感器的原理与特性。
所需单元及部件:霍尔片、磁路系统、电桥、差动放大器、V /F 表、直流稳压电源,测微头、振动平台。
有关旋钮的初始位置:差动放大器增益旋钮打到最小,电压表置2V 档,直流稳压电源置2V 档,主、副电源关闭。
实验步骤:(1)了解霍尔式传感器的结构及实验仪上的安装位置,熟悉实验面板上霍尔片的符号,霍尔片安装在实验仪的振动圃盘上,两个半圆永久磁钢固定在实验仪的顶板上,二者组合成霍尔式传感器。
(2)开启主、副电源将差动放大器调零后,增益置接近最小,使得霍尔片在磁场中位移时V /F 表读数明显变化,关闭主,副电源,根据图1接线,W 1、r 为电桥单元的直流电桥平衡网络。
(3)装好测微头,调节测微头与振动台吸合并使霍尔片置于半圆磁钢上下正中位置。
(4)开启主、副电源,调整W1使电压表指示为零。
图1 接线图(5)上下旋动测微头,记下电压表读数,建议每隔0.2mm读一个数,将读数填入下表:做出V—X曲线,指出线性范围,求出灵敏度,关闭主、副电源。
可见,本实验测出的实际上是磁场情况,它的线性越好,位移测量的线性度也越好,它的变化越陡,位移测量的灵敏度也越大。
(6)实验完毕,关闭主、副电源,各旋钮置初始位置。
注意事项:(1)由于磁路系统的气隙较大,应使霍尔片尽量靠近极靴,以提高灵敏度。
(2)一旦调整好后,测量过程中不能移动磁路系统。
(3)激励电压不能过大,以免损坏霍尔片。
(±4V就有可能损坏霍尔片)。
直流激励时霍尔式传感器的位移特性试验

3
实验实训要求
■必修□选修□其他
实验实训指导教师
朱良学
考核方法
实验数据的正确记录及实训报告
项目建立时间
2014年9月
实验实训教材或指导书
■有□无
教材或指导书名称及版本
传感器实训指导书
实验实训内容
简介
(目的、要求、
内容)
训练目的:
掌握霍尔式传感器测量位移的原理和方法
场地要求及安全要求:
1.保持干净干燥
酒泉职业技术学院实验实训项目卡
系(部)机电工程系实验实训室传感器技术实训室指导教师:朱良学№.6
实验实训项目名称
直流激励时霍尔式传感器的位移特性试验
性
质
□基础课
□专业基础课
■专业课
类
别
■验证性
□设计性
□综合性
实验(实训)时数
2
所属课程
信息检测与控制
同时实验(实训)组数
8
面向专业
电气自动化;电子信息;应用电子
2.正确接线
3.安全用电
教学组织及内容:
1.将霍尔传感器安装固定在静态支架上,并固定好测微头。
2.完成霍尔传感器以及实验模块的接线。
3.实验模块接入模块电源15V(从主控箱引入),检查无误后,开启电源,调节测微头使霍尔片在磁钢中间位置,再调节Rw1使电压表指示为零,若无法调零则交换放大器两端输入接线。
4.旋转测微头向轴向方向推进,每转动0.2mm记下一个读数,直到读数近似不变,将读数填入表。
主要实验
实训设备
名称
型号规格
数量
名称
型号规格
数量
霍尔传感器实验模块
8
测微头
霍尔传感器的直流激励报告示例

吉林大学
仪器科学与电气工程学院
本科生实验报告
实验项目:霍尔传感器的直流激励报告示例
学生姓名:
学号:
实验日期:
实验地址:
2010 年月日
一、实验目的
了解霍尔式传感器的原理与特性
二、实验所用仪器设备
霍尔片、磁路系统、电桥、差动放大器、F/V表、直流稳压电源、测微头、振动平台、主副电源
三、实验原理
根据霍尔效应,霍尔电势V H=K H IB,当霍尔元件处在梯度磁场中运动时,它就可以进行位移测量了。
四、实验步骤
(1)开启主副电源,将差动放大器调零,增益最小。
关闭电源,并连接电路图
(2)调节测微头与振动台吸合并使霍尔片至于半圆磁钢上下正中位置
(3)开启主副电源,调整W1使电压表指示为零
(4)上下旋动测微头,记录电压表读数,并填入表中
(5)关闭电源,整理器材
五、实验结果与分析
V—X曲线见下图
从曲线我们可以看出线性度是比较好的,其灵敏度为K=0.02v/0.100mm=0.2v/mm,关系式为V=KX-1.6022(V)
六、实验心得与建议
该实验通过测梯度磁场的情况,从而得到间接得到位移量。
这给我们自己设计传感器提供了一个很好的思路,我们可以通过设置一个容易控制和测量的物理量,使其按一定规律在所测的物理量上分布,从而我们可以通过测量容易测得的物理量来间接得到我们需要测的量,不仅测量方便而且比较准确。
霍尔传感器电容传感器4实验数据+图形
《机械工程测试技术》实验指导书实验一、霍尔传感器的直流激励特性一、实验目的加深对霍尔传感器静态特性的理解。
掌握灵敏度、非线性度的测试方法,绘制霍尔传感器静态特性特性曲线,掌握数据处理方法。
二、实验原理当保持元件的控制电流恒定时,元件的输出正比于磁感应强度。
本实验仪为霍尔位移传感器。
在极性相反、磁场强度相同的两个钢的气隙中放置一块霍尔片,当霍尔元件控制电流I不变时,Vh与B成正比。
若磁场在一定范围内沿X方向的变化梯度dB/dX为一常数,则当霍尔元件沿X方向移动时dV/dX=RhXIXdB/dX=K,K为位移传感器输出灵敏度。
霍尔电动势与位移量X成线性关系,霍尔电动势的极性,反映了霍尔元件位移的方向。
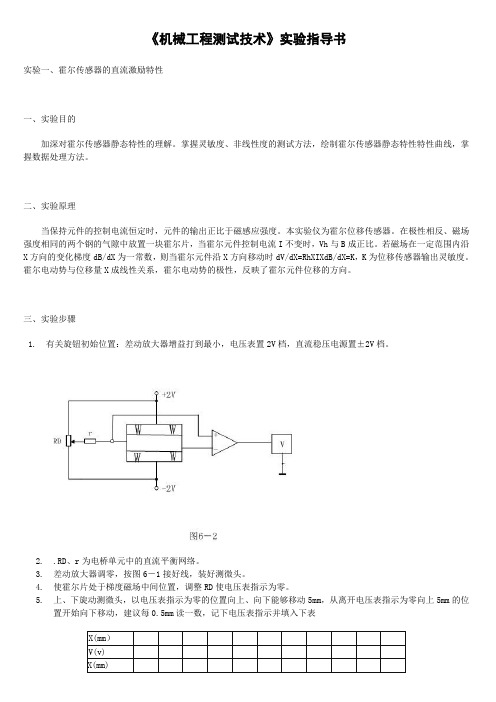
三、实验步骤1.有关旋钮初始位置:差动放大器增益打到最小,电压表置2V档,直流稳压电源置±2V档。
2..RD、r为电桥单元中的直流平衡网络。
3.差动放大器调零,按图6-1接好线,装好测微头。
4.使霍尔片处于梯度磁场中间位置,调整RD使电压表指示为零。
5.上、下旋动测微头,以电压表指示为零的位置向上、向下能够移动5mm,从离开电压表指示为零向上5mm的位置开始向下移动,建议每0.5mm读一数,记下电压表指示并填入下表X(mm)V(v)X(mm)V(v)6.用以上的位移和输出电压数据,绘出霍尔传感器静态特性的位移和输出电压特性V-X曲线, 指出线性范围。
7.将位移和输出电压数据分成两组,用“点系中心法”对数据进行处理,并计算两点联线的斜率,即得到灵敏度值。
实验可见:本实验测出的实际是磁场的分布情况,它的线性越好,位移测量的线性度也越好,它们的变化越陡,位移测量的灵敏度也就越大。
四、思考题1.为什么霍尔元件位于磁钢中间位置时,霍尔电动势为0。
2.在直流激励中当位移量较大时,差动放大器的输出波形如何?实验二、电容传感器的直流特性实验内容:加深对电容传感器静态特性的理解。
掌握灵敏度、非线性度的测试方法,绘制电容传感器静态特性曲线,掌握数据处理方法。
实验四霍耳式传感器静态位移测量
实验四 霍耳式传感器静态位移测量一、实验目的了解霍耳式传感器的工作原理和工作情况。
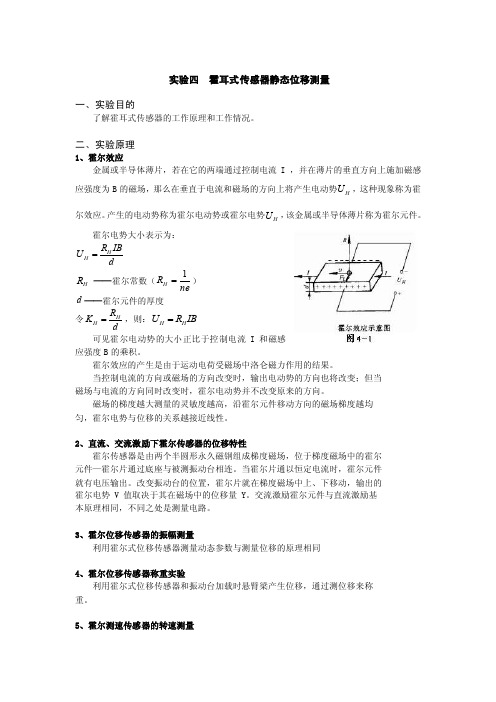
二、实验原理1、霍尔效应金属或半导体薄片,若在它的两端通过控制电流I ,并在薄片的垂直方向上施加磁感应强度为B 的磁场,那么在垂直于电流和磁场的方向上将产生电动势H U ,这种现象称为霍尔效应。
产生的电动势称为霍尔电动势或霍尔电势H U ,该金属或半导体薄片称为霍尔元件。
霍尔电势大小表示为:H H R IBU d=H R ——霍尔常数(1H R ne=) d ——霍尔元件的厚度令H H RK d=,则:H H U R IB =可见霍尔电动势的大小正比于控制电流I 和磁感应强度B 的乘积。
霍尔效应的产生是由于运动电荷受磁场中洛仑磁力作用的结果。
当控制电流的方向或磁场的方向改变时,输出电动势的方向也将改变;但当 磁场与电流的方向同时改变时,霍尔电动势并不改变原来的方向。
磁场的梯度越大测量的灵敏度越高,沿霍尔元件移动方向的磁场梯度越均 匀,霍尔电势与位移的关系越接近线性。
2、直流、交流激励下霍尔传感器的位移特性霍尔传感器是由两个半圆形永久磁钢组成梯度磁场,位于梯度磁场中的霍尔 元件—霍尔片通过底座与被测振动台相连。
当霍尔片通以恒定电流时,霍尔元件 就有电压输出。
改变振动台的位置,霍尔片就在梯度磁场中上、下移动,输出的 霍尔电势 V 值取决于其在磁场中的位移量 Y 。
交流激励霍尔元件与直流激励基 本原理相同,不同之处是测量电路。
3、霍尔位移传感器的振幅测量利用霍尔式位移传感器测量动态参数与测量位移的原理相同4、霍尔位移传感器称重实验利用霍尔式位移传感器和振动台加载时悬臂梁产生位移,通过测位移来称 重。
5、霍尔测速传感器的转速测量利用霍尔效应表达式:UH=KHIB,当被测圆盘上装上N只磁性体时,圆盘每转一周磁场就变化 N 次。
每转一周霍尔电势就同频率相应变化,输出电势通过放大、整形和计数电路就可以测量被测旋转物的转速。
三、所需单元和部件霍耳式传感器、直流稳压电源、差动放大器、电桥、测微器、V/F 表有关旋钮的初始位置:直流稳压电源输出置于 0V 档,V/F 表置于V表20V档, 差动放大器增益旋钮置于中间。
实验四 霍尔式传感器位移特性实验
实验四 霍尔式传感器位移特性实验一、实验目的:了解霍尔式传感器原理与应用。
二、基本原理:根据霍尔效应,霍尔电势U H =K H IB ,当霍尔元件处在梯度磁场中运动时,它就可以进行位移测量。
三、需用器件与单元:霍尔传感器实验模板、霍尔传感器、直流源±4V 、±15V、测微头、数显单元、相敏检波、移相、滤波模板、双线示波器。
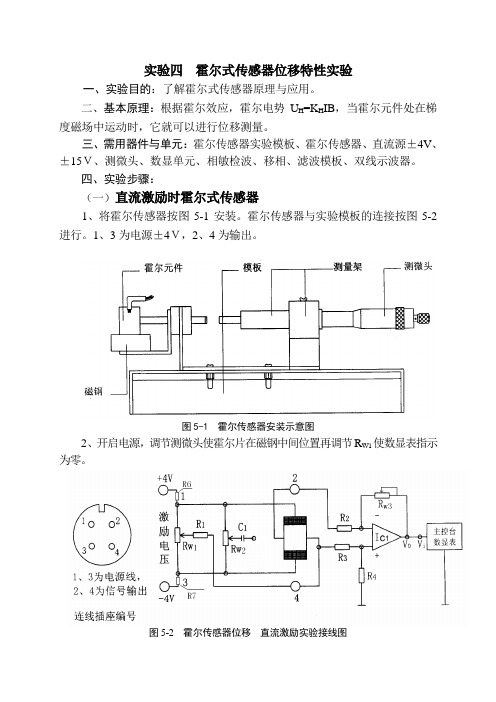
四、实验步骤:(一)直流激励时霍尔式传感器1、将霍尔传感器按图5-1安装。
霍尔传感器与实验模板的连接按图5-2进行。
1、3为电源±4V,2、4为输出。
图5-1 霍尔传感器安装示意图 2、开启电源,调节测微头使霍尔片在磁钢中间位置再调节R W1使数显表指示为零。
图5-2 霍尔传感器位移 直流激励实验接线图3、旋转测微头向轴向方向推进,每转动0.2mm记下一个读数,直到读数近似不变,将读数填入表5-1。
作出V-X曲线,计算不同线性范围时的灵敏度和非线性误差。
(二)交流激励时霍尔式传感器1、传感器安装如下图,实验模板上连线见图5-3。
霍尔实验模板移相、相敏、低通模板霍尔传感器安装示意图5-3 交流激励时霍尔传感器位移实验接线图2、调节音频振荡器频率和幅度旋扭,从L V输出用示波器测量,使输出为1KH Z、峰-峰值为4V,引入电路中(激励电压从音频输出端L V输出频率1KH Z,幅值为4V峰-峰值,注意电压过大会烧坏霍尔元件)。
3、调节测微头使霍尔传感器处于磁钢中点,先用示波器观察使霍尔元件不等位电势为最小,然后从数显表上观察,调节电位器R W1、R W2使显示为零。
4、调节测微头使霍尔传感器产生一个较大位移,利用示波器观察相敏检波器输出,旋转移相单元电位器RW和相敏检波电位器RW,使示波器显示全波整流波形,且数显表显示相对值。
5、使数显表显示为零,然后旋动测微头记下每转动0.2mm时表头读数,填入表5-2。
6、根据表5-2作出V-X曲线,计算不同量程时的非线性误差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
南昌大学实验报告
学生姓名: 学 号: 专业班级: 实验类型:□ 验证 □ 综合 □ 设计 □ 创新 实验日期: 实验成绩:
实验四 霍尔式传感器的静态位移特性—直流激励
实验目的:了解霍尔式传感器的原理与特性。
所需单元及部件:霍尔片、磁路系统、电桥、差动放大器、V /F 表、直流稳压电源,测微头、振动平台。
有关旋钮的初始位置:差动放大器增益旋钮打到最小,电压表置2V 档,直流稳压电源置2V 档,主、副电源关闭。
实验步骤:
(1)了解霍尔式传感器的结构及实验仪上的安装位置,熟悉实验面板上霍尔片的符号,霍尔片安装在实验仪的振动圃盘上,两个半圆永久磁钢固定在实验仪的顶板上,二者组合成霍尔式传感器。
(2)开启主、副电源将差动放大器调零后,增益置接近最小,使得霍尔片在磁场中位移时V /F 表读数明显变化,关闭主,副电源,根据图1接线,W 1、r 为电桥单元的直流电桥平衡网络。
(3)装好测微头,调节测微头与振动台吸合并使霍尔片置于半圆磁钢上下正中位置。
(4)开启主、副电源,调整W1使电压表指示为零。
(5)上下旋动测微头,记下电压表读数,建议每隔0.2mm 读一个数,将读数填入下
表:
图1 接线图
做出V—X曲线,指出线性范围,求出灵敏度,关闭主、副电源。
可见,本实验测出的实际上是磁场情况,它的线性越好,位移测量的线性度也越好,它的变化越陡,位移测量的灵敏度也越大。
(6)实验完毕,关闭主、副电源,各旋钮置初始位置。
注意事项:
(1)由于磁路系统的气隙较大,应使霍尔片尽量靠近极靴,以提高灵敏度。
(2)一旦调整好后,测量过程中不能移动磁路系统。
(3)激励电压不能过大,以免损坏霍尔片。
(±4V就有可能损坏霍尔片)。