飞思卡尔16位单片机的资源配置
飞思卡尔16位单片机寄存器总结

一、输入输出端口寄存器I/O接口包括PORTA、B、E、K、T、S、M、P、H、J、AD。
其中PORTA、B、E、K属于复用扩展总线接口,单片机在扩展方式下工作时,作为总线信号。
1、PORTT、S、M、P、H、JI/O寄存器PTx如果对应位数据方向寄存器DDRx为“0”,输入,读取该寄存器返回引脚值;“1”,输出,读取该寄存器返回I/O寄存器的内容。
数据方向寄存器DDRx决定对应引脚为输出还是输入,“0”为输入,“1”为输出,复位后,默认为输入。
上拉/下拉使能寄存器PERx选择使用内置上拉/下拉器件,“1”允许,“0”禁用。
中断使能寄存器PIExPORTP、H、J三个端口具有中断功能。
“1”对应引脚允许中断,“0”禁止,复位后,所有端口中断关闭。
中断标志寄存器PIFxPORTP、H、J三个端口具有中断功能。
“1”对应引脚允许中断,“0”禁止,复位后,所有端口中断关闭。
2、PORTA、B、E、KI/O寄存器Px若某端口的引脚被定义为输出,写入I/O寄存器中的数值会从对应引脚输出;输入,通过I/O寄存器读取对应引脚电平。
数据方向寄存器DDRx决定对应引脚为输出还是输入,“0”为输入,“1”为输出,复位后,默认为输入。
PORTE最低两位只能为输入。
上拉电阻控制寄存器PERx第7、4、1、0位分别控制K、E、B、A端口,“1”允许使用对应端口的上拉电阻,“0”禁止,复位后,PK、PE端口使能,PB、PA禁止。
二、中断系统中断控制寄存器INTCR第7位IRQE,中断电平/边沿有效选择,0为低电平有效,1为下降沿有效;第6位IRQEN,外部中断IRQ中断请求使能,0关闭,1允许。
三、PWM模块PWM允许寄存器PWME对应每一位PWMEx,1启动输出,0停止输出,读写任意时刻。
PWM预分频时钟选择寄存器PWMPRCLK为Clock A和B选择独立的预分频因子,读写任意时刻。
Clock B对应6、5、4三位,Clock A对应2、1、0三位,分别可以实现2、4、8、16、32、64、128分频。
飞思卡尔单片机S12使用方法及程序
飞思卡尔单片机S12使用方法及程序单片机简介:9S12XS128MAA单片机是16位的单片机80个引脚,CPU是CPU12X,内部RAM 8KB,EEPROM:2KB,FLASH:128KB,外部晶振16M,通过内部PLL可得40M总线时钟。
9S12XS128MAA单片机拥有:CAN:1个,SCI:2个,SPI:1个,TIM:8个,PIT:4个,A/D:8个,PWM:8个下面介绍下我们项目用到的几个模块给出初始化代码1、时钟模块初始化单片机利用外部16M晶振,通过锁相环电路产生40M的总线时钟(9S12XS128系列标准为40M),初始化代码如下:view plaincopy to clipboardprint?/******************系统时钟初始化****************/void Init_System_Clock(){asm { // 这里采用汇编代码来产生40M的总线LDAB #3STAB REFDVLDAB #4STAB SYNRBRCLR CRGFLG,#$08,*//本句话含义为等待频率稳定然后执行下一条汇编语句,选择此频率作为总线频率BSET CLKSEL,#$80}}/******************系统时钟初始化****************/void Init_System_Clock(){asm { // 这里采用汇编代码来产生40M的总线LDAB #3STAB REFDVLDAB #4STAB SYNRBRCLR CRGFLG,#$08,*//本句话含义为等待频率稳定然后执行下一条汇编语句,选择此频率作为总线频率BSET CLKSEL,#$80}上面的代码是汇编写的,这个因为汇编代码量比较少,所以用它写了,具体含义注释已经给出,主函数中调用此函数即可完成时钟初始化,总线时钟为40M.2、SCI模块初始化单片机电路做好了当然少不了和PC之间的通信,通信通过单片机串口SCI链接到PC 端的COM口上去。
飞思卡尔单片机教学

沿锁存。LSTRB:在外部使用2片8位宽度存储器时和ADDR0,R/W配合使用。可可转转到到9页页图图。。
模式选择和PORTE复用 TEST:保留脚,接地 XIRQ:非屏蔽中断 IRQ:可屏蔽中断
RAM
EEPROM
Flash/ROM
外部扩展存储器
低
§3-5 复位及时钟—复位
上电复位
单片机自动检测VDD端的正跳变,启动自动工作。
外部复位
通过RESET引脚加一低电压,拉低超过一定时间 后可实现复位。
看门狗复位
帮助系统在软件跑飞后自动复位。
时钟监视器复位
利用内部的RC电路来保证时钟频率满足要求。
MC9S12DG128拥有128K的FLASH,8K的RAM,2K的EEPROM。
用于给单片机内部提供合适的电源电压,9S12单片机内核使用2.5V供电.VDD1\2,VSS1\3,VDDPLL若使用电压调整模块,这些引脚
电压调整模块及相关引脚 只用接去耦电容.注意VDD1.2的箭头是向外出的.
电压调整模块
存储器容量寄存器
RAM_SW2-RAM_SW0:分配系统RAM存储空间
寄存器区映射寄存器-INITRG
指定内部寄存器区基址的高5位。 则最小基址是$0000,最大基址为$7FFF(D7=0决定)。
使用时,一般定位在$0000开始的1K中。 因为前256个字节可以用直接地址(8 bit地址)访问,如果
Z: 0标志,当运算结果为0时,该位置1。
V: 2补码运算溢出标志,当运算结果出现2补码溢出时,该位置1。
飞思卡尔16位MCUMC9S12P-系列参考手册

飞思卡尔16位MCUMC9S12P-系列参考手册飞思卡尔16位MCU MC9S12P-系列参考手册详情请下载: 16位MC9S12P-Family.pdfThe MC9S12P family is an optimized, automotive, 16-bit microcontroller product line focused on lowcost,high-performance, and low pin-count. This family is intended to bridge between high-end 8-bit microcontrollers and high-performance 16-bit microcontrollers, such as the MC9S12XS family. The MC9S12P family is targeted at generic automotive applications requiring CAN or LIN/J2602 communication. Typical examples of these applications include body controllers, occupant detection, door modules, seat controllers, RKE receivers, smart actuators, lighting modules, and smart junction boxes.The MC9S12P family uses many of the same features found on the MC9S12XS family, including errorcorrection code (ECC) on flash memory, a separate data-flash module for diagnostic or data storage, a fastanalog-to-digital converter (ATD) and a frequency modulated phase locked loop (IPLL) that improves theEMC performance.The MC9S12P family deliver all the advantages and efficiencies of a 16-bit MCU while retaining the lowcost, power consumption, EMC, and code-size efficiency advantages currently enjoyed by users of Freescale’s existing 8-bit and 16-bit MCU families. Like the MC9S12XS family, the MC9S12P family run 16-bit wide accesses without wait states for all peripherals and memories. The MC9S12P family is available in 80-pin QFP, 64-pin LQFP, and 48-pin QFN package options and aims to maximize pin compatibility with the MC9S12XS family. Inaddition to the I/O ports available in each module, further I/O ports are available with interrupt capability allowing wake-up from stop or wait modes.。
freescale_16位单片机使用new

MCU简介 微处理器(Microcontroller Unit, MCU ) 数字信号处理(Digital Signal Processing,DSP)
• 1996年,HC12系列MCU
• 2002年,HCS12系列MCU,系统总线频率最大25MHz • 2005年,HCS12X系列MCU,系统总线频率最大40MHz • HCS12 D系列——用于自动化和工业系统,特别适合用于汽车
芯片原理图
80引脚QFP封装 112引脚LQFP封装 5V输入和驱动能力
TM
Freescale Semiconductor Confidential and Proprietary Information. Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc. All other product or service names are the property of their respective owners. © Freescale Semiconductor, Inc. 2005.
模式选择
BKGD PR6 PE5 MODC MODB MODA 0 0 0 0 1 1 1 1 0 0 1 1 0 0 1 1 0 1 0 1 0 1 0 1 地址 线宽 0 16 16 16 0 16 --16 数据 线宽 0 8 16 16 0 8 --16
模式选择 特殊单片模式(BDM) 仿真扩展窄模式 测试模式 仿真扩展宽模式 普通单片模式 普通扩展窄模式 外设模式 普通扩展宽模式
TM
简介
TM
Freescale Semiconductor Confidential and Proprietary Information. Freescale™ Freescale Semiconductor Confidential and Proprietary Information. Freescale™ and the and the Freescale logo are trademarks of Freescale Semiconductor, Inc. product product Freescale logo are trademarks of Freescale Semiconductor, Inc. All otherAll otheror service or service names are the property of their respective owners. © Freescale Semiconductor, names are the property of their respective owners. © Freescale Semiconductor, Inc. 2005.Inc. 2005.
基于飞思卡尔16位单片机电磁型智能小车的设计
基于飞思卡尔16位单片机电磁型智能小车的设计BASED ON FREESCALE 16-BITMICROCONTROLLERSMART CAR DESIGN基于飞思卡尔16位单片机电磁型智能小车的设计摘要本文是以飞思卡尔智能车竞赛为背景设计的一个智能小车运行系统。
本系统是以飞思卡尔MC9S12XS128单片机为核心通过传感器识别道路的智能车控制系统。
本文着重阐述了道路信息的获取,处理和识别过程,并设计出PID控制器,运用有效的控制算法对智能小车进行控制,使智能小车能准确快速地对道路进行跟踪。
该系统通过光电传感器获取当前道路信息,通过有效的数字图像处理算法对原始图像进行处理,对主要的有用信息进行分析和提取。
在智能小车运动的控制中,对小车的转向和速度采用PID控制算法,控制表来对智能小车进行转向和速度控制。
单片机,智能小车,PID控制算法Based on Freescale 16-bit microcontroller smart car designAbstractIt is based on freescale intelligence car competition as the background design of a smart car running system in this article. This system is based on freescale MC9S12XS128 single-chip microcomputer as the core through the sensors to identify road intelligent car control system.The article focuses on the acquisition,processing and recognition of the target path information.The Fuzzy controller using an effective controlling algorithm for intelligent vehicle control makes the smart car track the road fast and accurate.With the CCD camera the system obtains the current road information and deal with the original image,the main useful analysis and information extraction through effective digital image processing algorithms.According to the motion rules of the intelligent vehicle,fuzzy control algorithm and fuzzy PID algorithm can be applied to control the steering and speed of the intelligent vehicle separately.Fuzzy control rules can be generated according to the requirement of the path tracking,which is followed by the generation of the fuzzy control table,then the steering and motion speed of the intelligent vehicle can be regulated after querying the fuzzy control table according to the path information which is already inquired.KEYWORDS:mcu, smart car , PID,目录摘要(中文)------------------------------------------------------------------------------- 2摘要(外文)------------------------------------------------------------------------------- 3 1、绪论 -------------------------------------------------------------------------------------- 11.1 智能汽车赛事概况 ------------------------------------------------------------- 11.2 课题研究现状 ------------------------------------------------------------------- 11.3 本课题的研究内容 ------------------------------------------------------------- 22、智能车原理 ----------------------------------------------------------------------------- 32.1 直立行走任务分解 ------------------------------------------------------------- 32.2 车模直立控制 ------------------------------------------------------------------- 42.3 车模速度控制 ------------------------------------------------------------------- 82.4 车模方向控制 ----------------------------------------------------------------- 102.4.1 道路电磁中心线的偏差检测--------------------------------------- 102.4.2 电机差动控制--------------------------------------------------------- 102.5 车模倾角测量 ----------------------------------------------------------------- 112.5.1 加速度传感器--------------------------------------------------------- 112.5.2 角速度传感器-陀螺仪----------------------------------------------- 123、智能车硬件设计与软件设计------------------------------------------------------ 163.1智能车硬件设计--------------------------------------------------------------- 163.1.1 整体电路框图--------------------------------------------------------- 163.1.2 单片机最小系统------------------------------------------------------ 173.1.3 倾角传感器电路------------------------------------------------------ 193.1.4 电机驱动电路--------------------------------------------------------- 203.1.5 速度传感器------------------------------------------------------------ 213.1.6 电磁线检测电路------------------------------------------------------ 223.2智能车软件设计--------------------------------------------------------------- 243.2.1 软件功能与框架------------------------------------------------------ 243.2.2 单片机资源配置------------------------------------------------------ 273.2.3 主要算法及其实现--------------------------------------------------- 283.2.4 程序调试与参数整定------------------------------------------------ 354、智能车机械设计 --------------------------------------------------------------------- 364.1 车模简化改装 ----------------------------------------------------------------- 364.2 传感器安装 -------------------------------------------------------------------- 374.2.1速度传感器安装------------------------------------------------------- 374.2.2电磁传感器安装------------------------------------------------------- 384.2.3车模倾角传感器------------------------------------------------------- 394.3 注意事项 ----------------------------------------------------------------------- 39 结论----------------------------------------------------------------------------------------- 40 附录程序代码 --------------------------------------------------------------------------- 41 参考文献----------------------------------------------------------------------------------- 46 致谢----------------------------------------------------------------------------------------- 471、绪论1.1 智能汽车赛事概况“飞思卡尔杯”全国大学生智能汽车竞赛是由教育部高等学校自动化专业教学指导分委员会主办,飞思卡尔半导体公司协办的全国性的比赛;全国大学生智能汽车竞赛是在统一汽车模型平台上,使用飞思卡尔半导体公司的8位、16位微控制器作为核心控制模块,通过增加道路传感器、设计电机驱动电路、编写相应软件以及装配模型车,制作一个能够自主识别道路的模型汽车,按照规定路线行进,以完成时间最短者为优胜。
飞思卡尔16位单片机MC9S12XS128加密(程序下载不进去,正负极未短路,通电芯片不发烫)后解锁的方法及步骤w
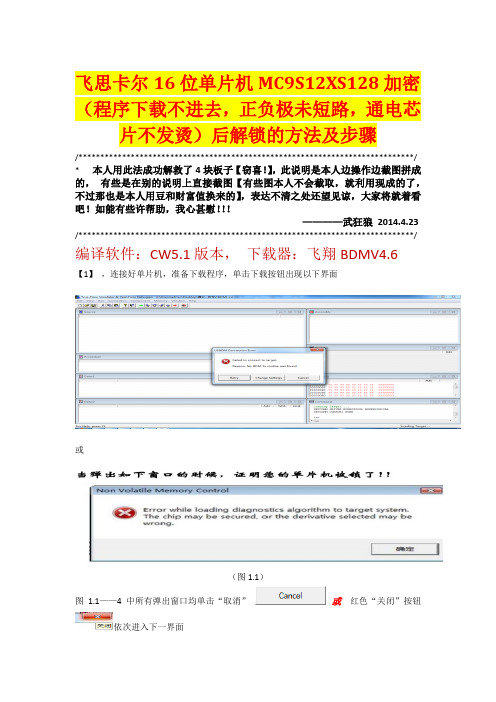
飞思卡尔16位单片机MC9S12XS128加密(程序下载不进去,正负极未短路,通电芯片不发烫)后解锁的方法及步骤/*****************************************************************************/ *本人用此法成功解救了4块板子【窃喜!】,此说明是本人边操作边截图拼成的,有些是在别的说明上直接截图【有些图本人不会截取,就利用现成的了,不过那也是本人用豆和财富值换来的】,表达不清之处还望见谅,大家将就着看吧!如能有些许帮助,我心甚慰!!!————武狂狼2014.4.23 /*****************************************************************************/编译软件:CW5.1版本,下载器:飞翔BDMV4.6 【1】,连接好单片机,准备下载程序,单击下载按钮出现以下界面或(图1.1)图 1.1——4中所有弹出窗口均单击“取消”或红色“关闭”按钮依次进入下一界面(图1.2)(图1.3)(图1.4)******************************************************************************* *******************************************************************************【2】单击出现如下图所示下拉列表,然后单击(图2.1)出现下图(图2.2)对话框,按下面说明操作(图2.2)弹出图2.3,单击按钮,依次出现如图2.4--5窗口,均单击(图2.3)(图2.4)******************************************************************************* *******************************************************************************【3】单击出现下拉列表,然后单击下拉列表中单击按钮出现如下界面,单击选择相对应的单片机型号(我选的红色方框里的HCS12X….),单击OK. PS:【此步骤是本人自己试出来的,若不进行此操作,图3.3中下拉列表中无要找选项】(图3.1)(图3.3)(图3.4)(图3.5)红色方框2中默认即为所要选的文件,此步只需单击确认按钮即可,如有不同读者酌情处置。
飞思卡尔单片机增强型定时器计数器ECT
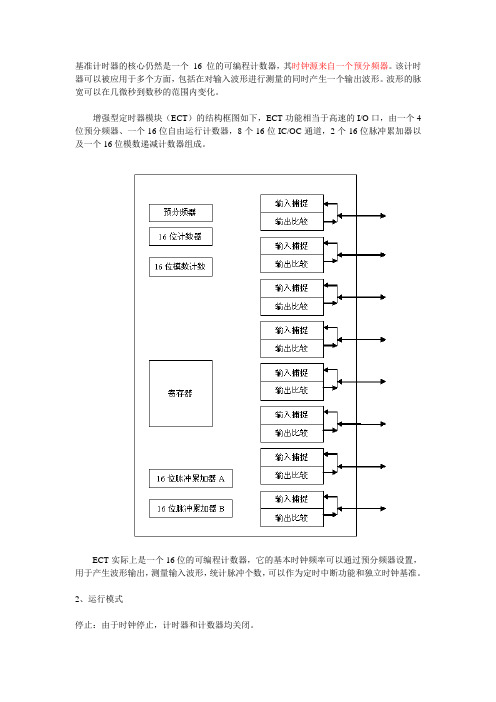
基准计时器的核心仍然是一个16 位的可编程计数器,其时钟源来自一个预分频器。
该计时器可以被应用于多个方面,包括在对输入波形进行测量的同时产生一个输出波形。
波形的脉宽可以在几微秒到数秒的范围内变化。
增强型定时器模块(ECT)的结构框图如下,ECT功能相当于高速的I/O口,由一个4位预分频器、一个16位自由运行计数器,8个16位IC/OC通道,2个16位脉冲累加器以及一个16位模数递减计数器组成。
ECT实际上是一个16位的可编程计数器,它的基本时钟频率可以通过预分频器设置,用于产生波形输出,测量输入波形,统计脉冲个数,可以作为定时中断功能和独立时钟基准。
2、运行模式停止:由于时钟停止,计时器和计数器均关闭。
冻结:计时器和计数器均保持运行,直到TSCR($06)的TSFRZ 位被置1。
等待:计数器保持运行,直到TSCR($06)的TSWAI 位被置1。
正常:计时器和计数器均保持运行,直到TSCR($06)的TEN 位和MCCTL($26)的MCEN 位被分别清0。
IC 通道组由四个标准的缓冲通道IC0-IC3 和四个非缓冲通道IC4-IC7 组成,两部分的基本功能都是捕捉外部事件发生的时刻,但是缓冲通道除了IC/OC 寄存器TCn 外,还设有保持寄存器TCnH,此外还在入口设置了延迟计数器,用来提高抗干扰能力。
非缓冲通道没有保持寄存器,入口也没有延迟计数器,但每个通道入口设置了一个 2 输入端的多路器,事件触发信号可以是来自本通道的输入引脚PORTn,也可以是来自其关联通道PORT(n-4)的延迟计数器输出,使用更加灵活。
当延迟功能有效时,输入引脚检测到一个有效的边沿后,延迟计数器开始对P 时钟(模块时钟)进行计数,当到达设定的计数值后,延迟计数器在其输出端有条件地产生一个脉冲,这个条件就是延迟前后的引脚电平相反。
这样可以避免对窄输入脉冲做出反应。
延迟计数结束后,计数器自动清除。
输入信号两个有效边沿之间的持续时间必须大于设定的延迟时间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
以MC9S12XS128MAL为例,其实DG128之类的类似。
如图一,128代表的是单片机中的FLASH大小为128K Byte,同理64代表的是单片机中的FLASH大小为64 K Byte,256代表的是单片机中的FLASH大小为256 K Byte。
但是S12(X)所使用的内核CPU12(X)的地址总线为16位,寻址范围最大为2^16 =64K Byte,而这64K Byte的寻址空间还包括寄存器、EEPROM (利用Data Flash模拟)、RAM等,因此不是所有的64K Byte都是用来寻址FLASH。
所以在S12(X)系列单片机中,很多资源是以分页的形式出现的,其中包括EEPROM、RAM、FLASH。
EEPROM的每页大小为1K Byte,RAM的每页大小为4K Byte,FLASH的每页大小为16K Byte。
因此XS128中EEPROM的页数为8K/1K = 8页,RAM的页数为8K/4K = 2页,Flash的页数为128K/16K = 8页。
图一
图二
在单片普通模式中,复位后,所有内存资源的映射如图二所示,其中从0x0000-0x07FF 的2K范围内映射为寄存器区,如I/O端口寄存器等,当然寄存器没有那么多,后面的一部分其实没有使用;
从0x0800-0x0BFF,共1K的空间,映射为EEPROM区,由上面的分析,XS128中共有8页的共8K的EEPROM,所以这8页的EEPROM都是以分页的形式出现的,可以通过设置寄存器EPAGE选择不同的页并进行访问;
从0x0C00到0x0FFF的1K空间为保留区(其实这里面也有学问,以后探讨);
从0x1000到0x3FFF的12K空间为RAM区,分为三页,但是和前面所说的EEPROM不同,这三页中有2页(对于XS128和XS256)或一页(对于XS64)为固定页,位于12K空间的后一部分,以XS128为例,其内部的RAM资源为8K,所以其三页中的最后两页(0x2000-0x3FFF)为固定页,第一页(0x1000-0x1FFF)为窗口区,通过设置寄存器RPAGE来映射其他分页的RAM,当然在单片普通模式下,XS128内部已经没有其他的RAM了,所以这一页其实也没有用。
但是对于XS256,这一页是有用的,因为它总共有12K的RAM。
但是,在单片普通模式下,即没有外扩RAM的情况下,用户是不用刻意的去配置RPAGE的,因为复位的时候,已经默认指向那一页的RAM。
从0x4000-0xFFFF的总共48K的空间为Flash区,分为三页。
其中第一页和第三页为固定的Flash页,中间的一页(0x8000-0xBFFF)为窗口区,通过设置PPAGE寄存器,可以映射到其他的分页Flash。
在最后的一页固定的Flash区域中的最后256字节中,保存的是中断向量。
对于RAM和Flash来说,其实固定页和其他的分页资源是统一编址的,不同的是固定
页不可以通过寄存器(RPAGE、PPAGE)改变映射,而其他的页必须通过寄存器的设置来选择映射不同的页。
----深山老林。