月球探测器软着陆
月球着陆器软着陆机构着陆稳定性仿真分析
第30卷第5期2009年9月宇 航 学 报Journal o fA stronauticsV o.l 30Septe mberN o .52009月球着陆器软着陆机构着陆稳定性仿真分析朱 汪,杨建中(中国空间技术研究院总体部,北京100094)摘 要:介绍了软着陆机构仿真模型,提出了着陆稳定性判据和稳定性边界的离散化搜寻策略,并以实际算例给出了由着陆器着陆瞬时的竖直速度、水平速度、偏航角和月面倾角等主要影响因素确定的着陆稳定性边界。
分析结果表明:对称着陆比非对称着陆更稳定;横向速度较大时支柱联接点容易发生强度破坏;当着陆面存在坡度时,横向速度沿下坡方向相对于沿上坡方向而言,着陆器更容易翻倒。
关键词:着陆稳定性;着陆冲击;软着陆机构;月球着陆器中图分类号:V 47;TB36 文献标识码:A 文章编号:1000-1328(2009)05-1792-05DO I :10.3873/.j issn .1000-1328.2009.05.008收稿日期:2008-11-27; 修回日期:2009-01-100 引言成功着陆是任何着陆探测任务的先决条件。
月球着陆器进入下降轨道后,先由反推发动机减速,同时通过姿态控制系统调整姿态,到达一定高度后关闭发动机自由下落。
月球探测器的着陆质量从数百千克到数千千克,着陆瞬时速度从几米每秒到几十米每秒。
对于采用软着陆机构进行缓冲的着陆器而言,主/辅缓冲器是吸收并耗散着陆冲击能量的核心组件。
月球着陆器的着陆稳定性是指在着陆过程中,通过软着陆机构的主/辅缓冲器吸收冲击能量,保证着陆器不翻倒的可靠性。
着陆稳定性分析不仅要明确各个影响因素,而且由于着陆器机动性能的局限性和月面地理环境的复杂性,分析过程中必须考虑各影响因素的具体参数在较宽范围内变化时着陆器的响应情况,保证着陆器的稳定着陆。
着陆稳定性的影响因素包括着陆器相关参数、月壤力学特性及月貌分布、发动机关机时延特性及尾喷管撞击月面和燃料储箱的晃液动力学效应等[1]。
月球探测器软着陆精确建模及最优轨道设计
Fig. 1 C oordinate systems
→
→
→
→
→
→
→
→
(4)
对式 ( 4) 进行求导 ,可以得到探测器相对于惯性空间 的加速度为 dVI dt
→
按右手坐标系确定 。oxL yL zL 为月固坐标系 , 参考平 面是月球赤道面 , oxL 沿月球赤道面与起始子午面 的交线方向 , oyL 沿月球自转轴方向 , 该坐标系是右 手坐标系。 Ax 1 y1 z1 为原点在探测器的轨道坐标系 ,
0 引言 月球是距离地球最近的天体 , 对月球资源和环 境进行科学研究和考察 ,是人类走出地球 , 探索未知 世界所必需 经历的 重要步骤 。从 1959 年 至今 , 美 国、 前苏联和日本三个国家已成功地实现了对月球 的探测 。随着航天科技的不断发展 , 我国的月球探 测计划 “嫦娥工程” 也已经顺利展开 。 由于月球没有大气 ,探测器着陆时无法利用大气 制动 ,只能利用制动发动机来减速 , 在很大程度上限 制了探测器所能携带有效载荷的质量 。探测器在月 面着陆可以分为硬着陆和软着陆 。硬着陆对月速度 不受限制 ,探测器撞上月球后设备将损坏 , 只能在接 近月球的过程中传回月面信息 ;软着陆对月速度比较 小 ,探测器着陆后可继续在月面进行考察 , 因此相比 于硬着陆 ,软着陆更具有实用意义。目前已发表的文 献中探测器的动力学模型大多都是采用二维模型 , 即 假设月球探测器在一个固定的铅锤面内运动 , 没有考 虑侧向运动 ,而且所采用的模型都是在忽略月球自转 的基础上得到的 。但由于发动机安装偏差、 姿控 系统误差和月球自转等因素的存在 ,探测器难以保证 始终在固定的铅锤面内运动。文献 [9] 虽然考虑了探 测器在三维空间的运动 ,但所用模型经过了较高程度 的简化 , 将月球引力场假设为平行定常引力场 , 并且 没有考虑月球自转对系统的影响。 对于两点边值问题 ,除了某些特殊系统外 ,通常 难以求得最优控制规律的解析表达式 。因此 , 必须
嫦娥四号创造历史人类探测器首次在月球背面软着陆(节选)
592019.02对外传播案例剖析INTERNA TIONAL COMMUNICA TIONS传回到北京郊区的指挥控制中心。
中国探月工程总设计师吴伟仁说:“这是中国航天的一个重要里程碑。
”航天科技集团五院嫦娥四号探测器系统副总设计师贾阳说:“这是人类智慧的一次优美挥洒。
”2013年,嫦娥三号实现首次月球软着陆后,中国国家航天局认为作为备份的嫦娥四号应开展更有挑战的任务。
德国基尔大学物理实验与应用研究所项目总师温牧说:“这次任务令人非常兴奋,在月球背面着陆探测是世界第一次,为未来人类登月做准备是非常棒的想法。
”“当宇航员返回地球后,月球上造成的辐射还留在他们身体里。
这是一直存留的危险,所以我们必须把这些辐射搞明白。
”温牧说。
瑞典航天局太阳系统科学部部长科勒说,首次月球背面软着陆是中国的巨大成就,“我们非常高兴能成为这次任务的一部分”。
他说:“有一种理论认为,月球上的水是由于太阳风与月球表面的风化层相互作用而产生的,这是瑞典和中国科学家想通过探测解答的问题。
”嫦娥四号任务包含了4台国际载荷,为全球更多科学家提供了太空探索的机会,集中人类智慧破解宇宙谜题。
“我认为空间科学的一个美妙之处就在于许许多多国家一起合作,这很重要,也向全世界传递了和平的信息。
”温牧说。
责编:谭震嫦娥四号创造历史人类探测器首次在月球背面软着陆(节选)新华社报道这里既无风也无雨,除了时不时坠落的大大小小的陨石打破寂静,月球永远背向地球那面的山地荒原等待了数十亿年,终于迎来第一个翩翩降临的地球访客。
2018年12月8日从西昌卫星发射中心升空的嫦娥四号探测器,经过20多天环月飞行,纵览了月球表面星罗棋布的环形山,领略了高山峡谷、层峦叠嶂,终于在月球南极-艾特肯盆地这个太阳系中最大、最深、最古老的陨石坑迎来曙光。
2019年1月3日,研制者们决定,是时候让嫦娥四号去拥抱月球背面那片伤痕累累、陨坑遍布的陌生土地了。
10时15分,在距离月球约6.5万公里、环绕地月第二拉格朗日点、能同时看见地球和月球背面的中继星“鹊桥”的通信协助下,嫦娥四号上的变推力发动机被点燃,探测器的速度从相对月球1.7公里每秒降到接近为零。
嫦娥四号创造历史人类探测器首次在月球背面软着陆(节选)
嫦娥四号创造历史人类探测器首次在月球背面软着陆(节选)作者:来源:《对外传播》2019年第02期这里既无风也无雨,除了时不时坠落的大大小小的陨石打破寂静,月球永远背向地球那面的山地荒原等待了数十亿年,终于迎来第一个翩翩降临的地球访客。
2018年12月8日从西昌卫星发射中心升空的嫦娥四号探测器,经过20多天环月飞行,纵览了月球表面星罗棋布的环形山,领略了高山峡谷、层峦叠嶂,终于在月球南极-艾特肯盆地这个太阳系中最大、最深、最古老的陨石坑迎来曙光。
2019年1月3日,研制者们决定,是时候让嫦娥四号去拥抱月球背面那片伤痕累累、陨坑遍布的陌生土地了。
10时15分,在距离月球约6.5万公里、环绕地月第二拉格朗日点、能同时看见地球和月球背面的中继星“鹊桥”的通信协助下,嫦娥四号上的变推力发动机被点燃,探测器的速度从相对月球1.7公里每秒降到接近为零。
探测器调整了姿态,朝着艾特肯盆地中冯·卡门撞击坑相对平坦的坑底垂直降落下去。
当它距离月面约两公里时,太阳从东方照射月面形成的投影被探测器上的相机捕捉到,经过计算机“大脑”处理,它识别出下方的大石块和陨石坑,进行了第一次避障。
当距离月面100米时,它在空中悬停,利用激光扫描识别出月面上更小的障碍物以及坡度,它的“大脑”再次计算,寻找到一个较为安全的地点作为着陆点。
当距离月面两米时,探测器上的发动机停止工作,懷抱着月球车的金光闪闪的着陆器依靠自身重力落下,四条腿稳稳站立在荒凉的灰色月面,扬起一片月尘。
整个降落过程持续了大约12分钟,全部由探测器自主完成,地球上没有进行任何干预,但“鹊桥”将着陆的画面传回到北京郊区的指挥控制中心。
中国探月工程总设计师吴伟仁说:“这是中国航天的一个重要里程碑。
”航天科技集团五院嫦娥四号探测器系统副总设计师贾阳说:“这是人类智慧的一次优美挥洒。
”2013年,嫦娥三号实现首次月球软着陆后,中国国家航天局认为作为备份的嫦娥四号应开展更有挑战的任务。
月球探测器软着陆的最优控制
长江学者创新团队发展计划资助项目光学精密工程第17卷1引言上世纪9o年代以来世界上很多国家都制订了相应的月球探测计划而我国的探月计划即著名的嫦娥工程也已经实施这些标志着月球探测的一个新时代已经开始
第 17 卷 第 9 期 2009 年 9 月
Op t ic s
光学 精密工程
ω
r
λθ = 0
,
(6)
λω =
-
2λv rω - λθ ư
sin ψ-
λω
F m2
此外 ,也有学者运用伪光谱 、蚁群算法等方法 对该问题进行了求解 。王明光等[7] 使用伪光谱方 法将软着陆轨道优化问题转换为一个约束参数优 化问题 ,然后采用乘子法处理约束条件 ,采用变尺 度法求解处理后的参数优化问题 ,此方法具有收 敛速度快 、对初始控制量不敏感 、鲁棒性强的优 点 。朱建丰等[829] 将自适应遗传算法与模拟退火 算法相结合 ,得到一种全局搜索能力和局部搜索 能力均较强的自适应模拟退火遗传算法 ,对月球 软着陆轨迹进行优化后 ,能够搜索到比较精确的 全局最优轨迹 。
月球软着陆轨道优化方法比较研究
35 6
工
程
数
学
学
报
第2 卷 9
整姿态后 ,探测器垂直 降落到 月面 .霍曼变轨的理论 已经很成 熟,现在主要研究从近月点到月 面的轨道制动方案 .
2 月球软着 陆 问题描 述
探测器从 环月轨道开始软着陆时 ,首先进行霍 曼变轨 ,由一个大约 10 m 高度 的近似 圆形 1k
环 月停 泊轨道进入一条远 月点高度 约为 1 0 m,近 月点高度约 为 1 m的椭 圆轨道 ;当到达近 1 k 5 k
月点时,制动发动机 点火,探测器 进入动力下降段 ;距月面大约 2 m 时,水平速度减为 0 k ,调
了 参考 .
关键词:月球探测 ;软着陆;轨道优化 ;最优控制 ;参数化方法
分类号: AM S20 ) 9 9 (00 4N 0
中图分类号: 4 2 1 V 1. 4
文献标识码 : A
1 引言
我国载人月球探测工程分为 “ 绕、落、回 ”三个发展阶段[2,其 中第一个阶段 即绕月探测 1] , 工程 ,于 2 0 年 2 04 月立项启动 ,2 0 年 1 月 2 0 7 0 4日成 功发射 ,2 0 年 3 1日嫦娥一 号卫星在 09 月 完成预期的任务 目标后成功受控落月 ,整个工程取得 圆满成功 .第二个阶段为 “ ”,即研制 落 和发射月球软着陆器 ,并携带月球巡视勘察器 f 称月球车) 俗 ,在着 陆器落区附近进行探测 .无 论是第 二个阶段还是第三个阶段,都需要探测 器在 月面着 陆. 由于月球没有大气 ,探测器着 陆时无法利用大气 制动 ,只能利用制 动发动机来减速 ,在很 大程度 上限制 了探测器所能携带有效载荷 的质量 .在 月面着 陆可分为硬着陆和软着陆[.硬着 3 ] 陆【6对 月速度不受 限制 ,探测器撞上 月球 后设备将损坏 ,只 能在接近 月球 的过程 中传回月面 4_ _ 信息 ;软着陆对月速 度 比较小 ,探测器着陆后可继续在月面进行考察 ,因此相 比于硬着陆 ,软 着陆更具有实用意义 .月球 软着 陆大致可 以分为两种方式 :一种是直接着陆方式 ,另一种是经 过环月轨道的着陆方式.直 接着 陆方式仅要求单冲量制动着陆所需的速度增量较小 ,可 以多运 送一些有效载荷;而经过环月轨道 的着陆方式需要双冲量制动着 陆 f 环月轨道射入和软着陆) . 同第 一种 直接 软着 陆相 比较 , 自环 月轨道 开始的软着陆方案具有较长的软着 陆准备时间、可选 择 更大的着陆区域 、可减 少着陆舱 部分的燃料消耗等优 点 ,因此成为二十一世纪各航天大国进 行月球探测普遍采用 的软着陆方式 .
嫦娥三号软着陆过程简介
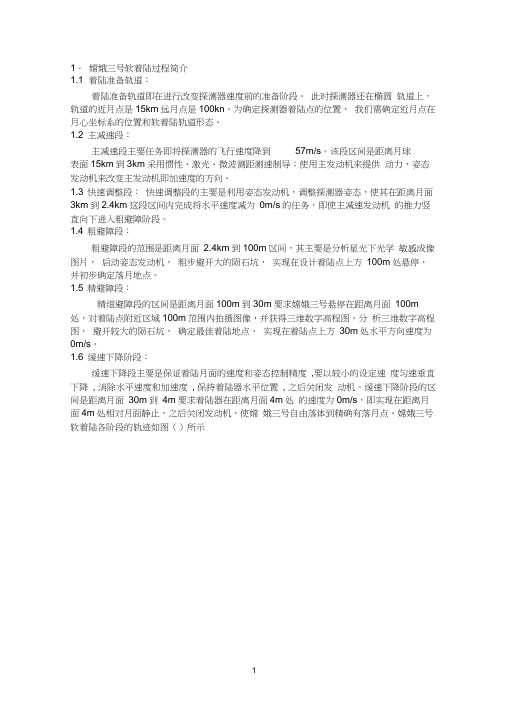
1.嫦娥三号软着陆过程简介1.1 着陆准备轨道:着陆准备轨道即在进行改变探测器速度前的准备阶段。
此时探测器还在椭圆轨道上,轨道的近月点是15km远月点是100kn。
为确定探测器着陆点的位置,我们需确定近月点在月心坐标系的位置和软着陆轨道形态。
1.2 主减速段:主减速段主要任务即将探测器的飞行速度降到57m/s。
该段区间是距离月球表面15km到3km采用惯性、激光、微波测距测速制导;使用主发动机来提供动力,姿态发动机来改变主发动机即加速度的方向。
1.3 快速调整段:快速调整段的主要是利用姿态发动机,调整探测器姿态,使其在距离月面3km到2.4km这段区间内完成将水平速度减为0m/s的任务,即使主减速发动机的推力竖直向下进入粗避障阶段。
1.4 粗避障段:粗避障段的范围是距离月面2.4km到100m区间,其主要是分析星光下光学敏感成像图片,启动姿态发动机,粗步避开大的陨石坑,实现在设计着陆点上方100m处悬停,并初步确定落月地点。
1.5 精避障段:精细避障段的区间是距离月面100m到30m要求嫦娥三号悬停在距离月面100m 处,对着陆点附近区域100m范围内拍摄图像,并获得三维数字高程图。
分析三维数字高程图,避开较大的陨石坑,确定最佳着陆地点,实现在着陆点上方30m处水平方向速度为0m/s。
1.6 缓速下降阶段:缓速下降段主要是保证着陆月面的速度和姿态控制精度,要以较小的设定速度匀速垂直下降, 消除水平速度和加速度, 保持着陆器水平位置, 之后关闭发动机。
缓速下降阶段的区间是距离月面30m到4m要求着陆器在距离月面4m处的速度为0m/s,即实现在距离月面4m处相对月面静止,之后关闭发动机,使嫦娥三号自由落体到精确有落月点。
嫦娥三号软着陆各阶段的轨迹如图()所示2.各阶段控制策略2.1主减速段设探测器在近月点处的速度为 V,垂直方向速度为V y ,速度方向与水平方向的夹 角为B 调整发动机方向,使发动机方向沿着垂直轴方向并保持加速度大小不变, 故探测器在此阶段只在垂直方向有加速度,探测器在垂直方向运动了 12000米, 速度减至为56m/s ,因此要满足方程,由此可以解出加速度a 和主减速阶段所需要的时间t2.2快速调整段利用姿态发动机,调整探测器姿态,使其在距离月面 3km 到2.4km 这段区间内完成将水平速度减为0m/s 的任务,即使主减速发动机的推力竖直向下进入粗 避障阶段。
月球探索的红色足迹:中国自主登月的巨大成就

2023年,中国航天事业取得了令世界瞩目的巨大成就——中国首次成功实现月球探测器软着陆并运行。
这标志着中国成为继美国和前苏联之后第三个拥有月球探测器软着陆技术的国家,也是世界上第一个在近十年内抵达月球表面的国家。
这一壮举为中国航天事业赢得了无数赞美和尊敬,同时也为人类探索太空的新篇章注入了无限期待。
中国自主登月的成功,不仅是科技实力的展示,更是国家创新能力和工程技术水平的集中体现。
在此次月球探测任务中,中国航天科技集团公司克服了重重困难,成功实现了嫦娥五号探测器的发射、轨道飞行、软着陆、取样返回等关键环节,展现了中国在空间探索领域的卓越实力和成熟技术。
中国航天人以顽强的意志和无比的智慧,书写出了自主创新的崭新篇章,为人类探索太空的梦想贡献了中国力量。
中国自主登月的巨大成就,为世界航天事业注入了新的活力和动力。
这一壮举将进一步推动人类探索太空的步伐,促进国际航天合作,共同开拓无垠宇宙的奥秘。
中国的成功启示我们,只要肩负着梦想和使命,勇攀高峰,勇往直前,就一定能创造奇迹,书写属于自己的辉煌篇章。
中国自主登月的红色足迹,不仅是一次技术上的成功,更是对世界传达的一种精神信念。
它让我们看到了中国在太空领域迈向世界先进行列的坚定决心,也为我们揭示了中国航天事业融入全球航天事业的责任担当。
中国的自主登月之旅,不仅令人激动,更给我们带来了无限的遐想。
对于中国而言,自主登月是一次站在世界科技前沿的强有力证明,更是激励我们不断探索太空的崇高使命。
这是中国自主创新的成功典范,也是中国航天精神的鲜活诠释。
中国自主登月的巨大成就,将激励和鼓舞无数年轻人投身航天事业,为人类探索太空的伟大事业贡献中国力量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
月球探测器软着陆动力学分析综述在月球探测器的研制过程中,软着陆动力学分析是其关键环节之一,它是通过探测器的着陆冲击过程进行模拟,来预测探测器的动力学特性。
月球探测器软着陆动力学分析的内容主要有以下两个方面:1)着陆稳定性分析。
确定不同着陆条件下探测器着陆稳定性的包络边界,保证探测器在一定姿态范围内不翻到、不陷落,并为探测器系统的工作提供牢固的支撑。
它是在系统层次上进行的动力学分析,主要关心整体结构的全局动力学响应。
2)动力学响应分析。
预测不同着陆条件下探测器上有效载荷处的加速度响应,进而确定其最大期望力学环境,为探测器结构设计和环境模拟试验提供依据,保证搭载人员和设备的安全。
它是对探测器局部响应进行的动力学分析,主要关心细节处的动力学响应。
第 1 章国外研究历史自20世纪60年代以来,由于“阿波罗”计划的需求推动,美国宇航局(National Aeronautics and Space Administration,NASA)针对月球探测器的软着陆动力学分析展开了一系列研究工作[1]。
在此期间,NASA的载人飞船中心(Manned Spacecraft Center,MSC。
1973年更名为约翰逊航天中心:Johnson Space Center,JSC)、兰利研究中心(Langley Research Center,LRC)、马歇尔太空飞行中心(George C. Marshall Space Flight Center,MSFC),及其合同商——班迪克斯公司(Bendix Corporation)与格鲁曼飞机工程公司(Grumman Aircraft Engineering Corporation,GAEC)分别建立了各自的探测器简化模型并针对各自的模型提出了相应的软着陆动力学分析方法。
1963年,MSFC的Lavender[2]将月球探测器简化为二维刚体模型,并提出了一种考虑了缓冲器的刚度、阻尼和压溃特性的软着陆动力学仿真算法。
同年,Cappelli[3]提出了一种用于分析三维月球探测器软着陆动力学的算法,并采用该算法得到了月球探测器的稳定性边界。
Lavender就该算法中对摩擦力和压溃力不恰当的假设与Cappelli进行了多次交流[4,5]。
1964年Lavender[6]在文献[2]的基础上考虑了足垫在月面上的滑移,研究了月面倾角、摩擦系数、初始着陆速度、探测器质量、着陆腿伸展半径、探测器质心高度、质心与探测器中轴线距离、主制动火箭推力、缓冲器压溃力以及着陆腿数量对探测器着陆稳定性的影响。
指出月面倾角、摩擦系数和初始着陆速度对着陆稳定性的影响最大。
同年,Bendix公司的Black[7]针对“勘测者”号月球探测器建立了软着陆动力学模型,并利用量纲分析原理建立了一系列试验模型。
研究了月面坡度、缓冲器压溃力和着陆腿数量对探测器着陆稳定性的影响,得出四腿探测器的稳定性最优等结论。
同年,兰利研究中心的Walton[8,9]针对“阿波罗”号飞船登月舱建立了软着陆动力学模型,基于非弹性碰撞理论,分析了探测器在四种不同着陆姿态情况下的着陆稳定性,得出非对称着陆相对于对称着陆更加危险的结论。
另外,兰利研究中心的Carden[10]和Blanchard[11]也对探测器的着陆稳定性进行了类似的研究。
1965年,MSFC的Admir[12]对以往的二维月球探测器软着陆动力学分析方法进行了重大改进,新的方法可以考虑足垫的三维运动和缓冲系统中包含任意数量着陆腿的情况。
同年,Lavender[13]将影响探测器运动的因素归为三类:月面环境、软着陆初始条件、探测器结构参数,并对以往的月球探测器软着陆动力学分析方法进行了总结,基于试验数据对比了六种典型分析方法的仿真精度。
对比结果指出探测器的着陆稳定性受动力学模型的细节影响较大,并不能简单的将分析方法的优劣归结于该方法所能考虑的影响探测器运动的因素的数量。
1966年,GAEC的Hilderman[14]描述了“阿波罗”号飞船登月舱缓冲系统的设计特点以及受初始着陆条件影响的着陆动力学,讨论了不同月面假设的影响,得到了稳定性和能量吸收边界,并将预测边界与1/6比例落振模型的试验进行对比。
同年,Bendix公司的Alderson[15]对“勘测者”号进行了软着陆稳定性理论研究,包括数学模型的建立和参数影响分析。
Irwin[16]对登月舱的同比模型试验机进行了着陆动力学分析,重点研究了不同参数组合下的软着陆动力学响应,这些参数包括水平和竖直着陆速度、着陆姿态角及角速度、主制动火箭推力、月面坡度和摩擦系数。
1967年,兰利研究中心的Herr和Leonard[17]通过试验确定了着陆舱1/6缩比模型的着陆稳定性边界,同时分析了完全刚性模型、着陆腿含缓冲器的刚性模型和着陆腿含缓冲器的柔性模型三种数值模型的稳定性边界。
指出2-2的着陆方式比1-2-1着陆方式更加稳定,水平速度会降低着陆稳定性,着陆腿辅着陆腿的柔性可以改善探测器的着陆稳定性等结论。
同年,Walton和Durling[18]总结了“勘测者”号和“阿波罗”号探测器软着陆动力学分析的一般流程,并在一般性假设下,针对四腿倒三角架式探测器提出了一种广义的着陆动力学分析方法。
该方法假设探测器和月面为任意刚体,着陆腿和探测器中心体的连接方式和位置也可任意选择。
1968年,休斯飞机公司(Hughes Aircraft Company)的Williamson[19]采用相平面方法分析了探测器在陡峭和崎岖地域着陆时的翻倒稳定性;同年,兰利研究中心的Howlett[20]建立了探测器的二维集中质量模型,将探测器简化为全桁架结构,采用有限元方法重点分析了着陆腿的屈曲和弹性对着陆动力学的影响。
并在动力学分析中,突破性地首次考虑了着陆腿的侧向振动。
指出,着陆腿的轴向特性比侧向特性对着陆动力学影响更大。
1971年,波音公司(The Boeing Company)的Merchant[21]等人将蒙特卡罗法引入着陆动力学分析中,对“阿波罗”飞船登月舱的冲击载荷及着陆腿内力进行了统计分析。
同年,NASA-MSC的Zupp和Doiron[22]讨论了NASA之前的探测器软着陆动力学模型的不足,建立了一个更加完善的动力学仿真模型。
该模型去掉了之前模型的许多假设和限制,考虑了着陆腿、姿态控制系统、主制动火箭、喷口接地和重力等载荷因素对机体的作用,比较了仿真结果与1/6缩比模型试验结果。
之后,麦道航太公司(Mcdonnell Douglas Astronautics Company)的Otto和Laurenson[23,24]等人基于有限元方法编写了一套功能强大的软着陆动力学分析程序,建立了包括中心体、有效载荷和辅助设备、缓冲系统三部分在内的月球探测器全柔性模型。
该程序使用龙格—库塔显示积分法求解系统运动方程,既可以分析中心体和着陆腿的柔性变形对探测器软着陆动力学响应的影响,又可以分析探测器的大位移和缓冲器的弹塑性大变形运动,用于确定着陆稳定性边界。
在与兰利研究中心提供的10个测试算例的试验数据对比过程中,验证了该程序的精度并得到了许多前所未有的重要结论:1)中心体的柔性对缓冲载荷和探测器的运动影响很大。
表现为,探测器为刚性时着陆腿内产生的缓冲载荷相对柔性时高,中心体质心的加速度响应时间曲线上升得更快。
2)刚性月壤极大增加了着陆腿的缓冲力。
3)增加中心体的刚度不会提高其质心加速度响应的峰值等。
1972至1973年,NASA-MSC的William[25]和Weiss[26]先后对“阿波罗”号登月舱着陆缓冲系统和登月舱结构的整个发展历程作了详细的总结报告,包括软着陆动力学的仿真数据、试验数据和“阿波罗”号飞船的实测数据,验证了仿真数学模型的准确性。
在“阿波罗”计划成功之后,从上世纪70年代末开始,月球探测活动进入低潮期,此阶段关于软着陆动力学的研究甚少。
进入90年代,全球探月活动迎来了第二次高潮。
美国在总结了60、70年代月球探测器研制工作的基础上,提出了“快、好、省”的空间探测战略,于1989年提出了重返月球计划,并于1994年和1998年分别发射了“克莱门汀”1号(Clementine-1)和“月球探测者”(Lunar Prospector)月球极轨卫星。
俄罗斯、欧空局、美国和日本也相继提出了新世纪的空间探测计划。
同时,由于计算力学的飞速发展,计算多体系统动力学和有限元分析技术开始被应用到航天器动力学分析中来。
机构分析的通用软件,如ADAMS的出现为探测器软着陆动力学的分析提供了方便。
有限元技术的成熟,也为软着陆结构动力学响应的分析提供了条件。
因此,进入本世纪以来,随着月球探测活动的复苏,探测器软着陆动力学的研究开始重新受到关注。
2000年,Doiron[27]介绍了利用ADAMS软件研究“阿波罗”号飞船登月舱的着陆动力学及其仿真分析技术的发展,并研究了着陆腿的翻倒稳定性面积、能量吸收和着陆载荷衰减,通过与“阿波罗”号的试验数据比较,证明了仿真结果有着非常高的保真度和精确性。
2005年,日本香川大学的Masahiro Nohmi[28]等利用ADAMS软件,建立了“月亮女神”号月球探测器模型,特别考虑了有岩石和凹坑的月面环境下,着陆器的姿态角、月面坡度和月壤的摩擦力对探测器软着陆的影响。
第 2 章国内研究历史国内对月球探测器软着陆动力学的研究起步较晚,自2000年发表《中国的航天》白皮书并确定开展以月球探测为主的深空探测的预先研究后,经过十多年的发展,国内学者在软着陆动力学研究领域已经取得了显著的成果。
开展这一领域研究的主要科研机构包括:中国空间技术研究院、哈尔滨工业大学、南京航空航天大学和北京理工大学等。
2003年,哈工大邓宗全等[29]基于能量原理和振动理论,通过理论推导得出三腿机械缓冲式月球探测器撞击月面时的上限振幅值计算公式。
在ADAMS软件基础上,用计算机建立了月球微重力环境并进行了数值仿真。
研究表明,理论值和仿真结果吻合较好。
2005年,中国空间技术研究院总体部的张志娟[30-32]等基于ADAMS软件建立了月球探测器软着陆过程的动力学模型,并对地面着陆稳定性试验进行仿真研究。
2007年,邓宗全等[33]采用MSC.Patran/Nastran软件,以四腿桁架式月球探测器为研究对象,对探测器的中心体进行了模态分析和受迫振动分析,指出阻尼比对结构的响应影响显著。
同年,哈工大王少纯等[34]采用ADAMS动力学仿真软件,对月球着陆器3种典型结构进行了动力学建模、优化及在月球重力场下着陆缓冲等仿真研究。
以冲击隔离系数的大小为具体评价指标,对月球着陆器3种典型结构缓冲性能进行了评价。
结果表明斜腿式两级缓冲月球着陆器新结构缓冲效果最好。