具有时延和数据包丢失的网络控制系统稳定性
网络控制系统丢包稳定性研究

网络控制系统丢包稳定性研究王耀庆; 孙建平【期刊名称】《《仪器仪表用户》》【年(卷),期】2019(026)011【总页数】3页(P91-93)【关键词】网络控制系统; 数据包丢失; 模型建立; 稳定性分析【作者】王耀庆; 孙建平【作者单位】华北电力大学河北保定 071003【正文语种】中文【中图分类】TP273.50 引言网络控制系统(NCS)指的是由网络组成的一个闭环的反馈控制系统[1]。
它是一种全分布式、网络化的实时反馈控制系统,是某个区域现场传感器、控制器以及执行器和通信网络的集合,提供设备之间的数据传输,使该区域内不同地点的用户实现资源共享和协调工作[2]。
网络控制系统在众多应用领域给人们带来了十分巨大的便利,但它也有一些不足的地方,而正是这些问题阻碍了它的进一步发展,所以为了解决这些问题使网络控制系统更好地服务于人类,关于其相关内容的研究是很有意义的。
本文将在忽略网络诱导时延的影响下,对网络控制系统中的数据包丢失情况进行模型建立,并对其稳定性问题进行分析研究。
1 网络控制系统的数据包丢失1.1 数据包丢失的原因网络拥塞、时序错乱和宽带限制是网络控制系统中数据包发生丢失的主要原因[3]。
其中,宽带限制指的是在因特网发生拥塞期间,TCP 信源和响应数据流按照网络中要求的数据包丢失率调整自己的发送速率,而无响应的数据流不能降低其发送的数据速率。
这种极度不平衡情况可能导致带宽的严重短缺,甚至导致拥塞的雪崩式发生。
1.2 数据包丢失的解决策略与方法图1 单个数据包丢失的网络控制系统图Fig.1 Network control system diagram for single packet loss当前对于网络控制系统中的数据包丢失的解决策略与方法主要应用的是抑制丢包的产生和修复丢失的数据包。
其中,抑制丢包的产生的这种方法应用较多,本文的研究也是基于这种情况的。
可以这样理解,对于数据包丢失的发生是大家不想看到的,但是它的发生在现有的技术水平下是无法避免的,但是可以尽量做到使这种丢包现象较少地发生,而不是想在之后怎么弥补其发生带来的影响。
多包传输动态输出反馈网络控制系统指数稳定性

D N in.o g , hn ig1 g A GX agd n Z agQn.n2 i
( . h n a gLg n nv r t , h n a g1 0 6 C ia 2 I s tt o S s m S in e ,N r ese nv r t , h n 1 S e y n io gU i s y S e y n 0 1 8, hn ; . nt ue f yt c c s ot atr U i s y S e — ei i e e h n ei
多包传 输 动 态 输 出反 馈 网络 控 制 系统 指 数 稳定 性
党向东 , 张庆 灵
(. 1 沈阳理工大学 信息科学与工程学院 , 辽宁 沈 阳 10 6 ;. 1 18 2 东北大学 系统科 学研究 所, 辽宁 沈阳 100 ) 1 4 0
摘
要 : 究在 传感 器与 控 制器 间的 多 包传 输 网络 控 制 系统 的指 数 稳 定性 和控 制 器设 研 计问题. 将有时延和有数据包丢失、 无时延和有数据包丢失两情形的多包传输动态输 出
文献 标识 码 : A
中图分类 号 :P 3 T 1
Ex o e t lS a i t fDy a i t u e d a k p n n i t bl y o n m c Ou p tF e b c a i
NCS wih M u tp e Pa k t Tr ns s i n t li l - c e a miso
2 0 0 8 年 8 月
沈 阳 理 工 大 学 学 报
TRANS ACTI ONS OF S HENYANG H GONG UNI VERS nY
Vo 1. 2 7 No . 4 Au . 2 0 0 8 g
网络控制系统的稳定性

11()x t A x =z(t)=Az(t)1 20 0x x ⎤⎡=⎥⎢⎣⎦()(()(x t Ax t y t Cx t ==tx的系统中只有在khτ+Φz kh()Φ=⎢-⎣静态网络调度协议可以像令牌环或令牌总线一样提供恒定的时延。
000 K ⎥⎢⎥Φ=⎢⎥-⎥⎥⎦Φ是时变的,而繁琐的记录也必须要执行,繁琐的记录tx()=u(t),tKΦ=⎢-⎣ t x ()=ax(t)+u(t),t⎢Φ=⎢利用混合系统分析技术分析稳定性()(x t Ax t+=为在t间B CB D ⎤⎥+⎦B e=⎰tx()=Ax(t)-BKx(t),t(sc x kh τΦ+()(k δΦ=Φτ),x(kh+)kx (kh+)k τ()k x kh τ+=()(k z kh δΦ()k δΦ=⎢⎣在控制系统的建立中,两台计算机分别控制被控对象和控制器,并通过起来。
每一台计算机各自运行着一VisualC++程序,使接口在他们之间建立协议连接,且接受各种数据参数,例如,采样周期、控制评估和同步时钟信号。
我们用MATLAB1 205 00x x ⎤⎡=⎥⎢⎣⎦125sin(x x x u==对应的离散状态集合,他们是事件发则这个异步动态系统是指数稳定的,此时的衰减率强于α。
它不要求每一个差分方程都是异步稳定的,通过求解一组线性矩阵不等式得到s z(kh)Φ1Φ=⎢Φ⎣20Φ=⎢⎣111222P p P p ααΦΦ≤ΦΦ≤()s z kh Φ1⎢Φ=⎢Φ20⎢Φ=⎢12Φ⋅Φ具有舒尔性质,则如果被控对象的状态是静态调度规划的,则此网1Φ和2Φ都具有舒尔性质。
12 1.00⎢Φ=⎢⎢Φ=⎢1Φ和2Φ都不具有舒尔性质,但是12Φ⋅Φ具有舒尔性质。
如果此调度网被应用,那么此系统()V X X =-ˆˆ(x(t))x(t)V ≤z 11()x t A x =,1c ,1((1))(()())()sc k k k sc k x k h L H x kh τδδτ++++=Φ-Φ+ ,(sc k Kx kh τ+111222,P P P PββΦΦ≤ΦΦ≤12max 2),()βλΦ≥Φ。
网络控制系统稳定性分析及控制器设计的开题报告
网络控制系统稳定性分析及控制器设计的开题报告1.选题背景网络控制系统是现代控制系统中的重要一环,其优越性和潜力被广泛认可和挖掘。
网络控制系统由传感器、执行器、通信网络和控制器等部分组成,其具有可靠性高、实时性强、可远程控制等特点,在许多领域有广泛应用,如航空、交通、制造等。
然而,网络控制系统也存在着一些问题,其中最重要的问题是通信时延和数据包丢失导致的系统性能下降,乃至失控。
所以,在网络控制系统中,必须考虑时延和数据包丢失对系统稳定性的影响,以及如何通过控制器设计来提升系统的稳定性和性能。
2.选题意义当前,网络控制系统已广泛应用于许多领域。
然而,由于网络环境的不确定性和不稳定性,网络控制系统的稳定性和控制性能存在较大风险。
因此,如何提升网络控制系统的稳定性和控制性能一直是该领域的研究热点和难点。
本课题以网络控制系统稳定性分析及控制器设计为研究对象,旨在探索如何通过数据传输质量控制、控制器设计等手段,提高网络控制系统的稳定性和控制性能,为实际应用提供辅助决策依据和技术支持。
3.研究内容本课题将围绕如下内容展开研究:(1) 网络控制系统的稳定性分析。
研究网络控制系统在时延和数据包丢失条件下的稳定性和响应特性,分析网络控制系统的性能指标和影响因素。
(2) 控制器设计。
设计基于模型预测控制(MPC)算法的控制器,考虑网络时延和数据包丢失对控制效果的影响,探索如何提高控制器的鲁棒性和鲁棒性。
(3) 仿真实验。
基于Matlab或Simulink等软件平台,进行网络控制系统的仿真实验,验证理论分析和控制器设计的有效性和可行性。
(4) 论文撰写。
根据研究内容和实验结果,撰写毕业论文,对研究进行综合总结和归纳。
4.研究方法本课题将采用数学模型、控制理论、仿真实验和实际案例等方法进行研究。
首先,建立网络控制系统的数学模型,分析网络时延和数据包丢失对系统稳定性的影响,并基于控制理论设计控制器,以提高网络控制系统的稳定性和性能。
针对数据包丢失的网络控制系统的建模及稳定性分析
21 第 0 0 2年 9期
C m u e DS f w r n p l c t o s o p t rC o t a ea dA p i a i n 工 程 技 术
针对数据包丢失的网络控制系统的建模及稳定性分析
刘眷 玲 ( 河南省郑州市高新 区科学 大道解放 军信息工程大学理学院 ,郑 州 40 0 ) 5 0 1
丢 失 的 网络 控 制 系统 的建模 及 其稳 定性进 行 了分析 。 关建词 :网络 控制 系统 ;数 据 包丢 失 ; 系统 建模 ;稳 定性
:A 文章 缟 号 :10- 59( 1) 9 09 - 2 07 99 2 2 0 - 0 4 0 0
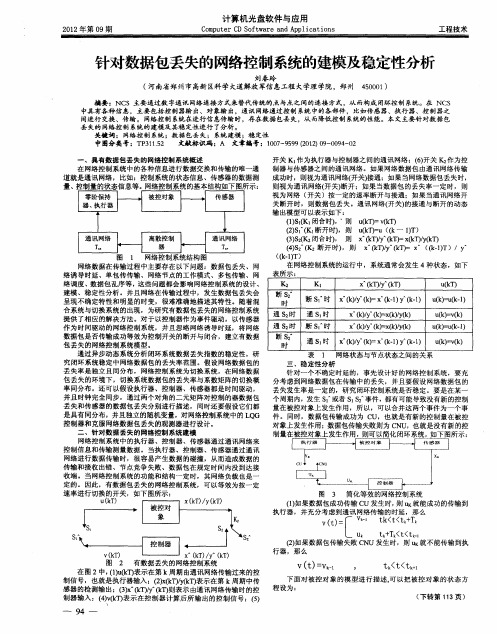
具有 数据 包丢 失 的网络 控 制系统 概 述 在 网络 控 制系 统 中的 各种 信息进 行 数据 交 换和传 输 的唯 一通 道 就 是通 讯 网络 , 比如 :控 制 系统 的状 态信 息 、传 感器 的数 据测 量、 控制 量 的状态 信 息等 。网络控 制 系统 的基 本结 构如 下 图所示 :
、
开关 Kt 作为执行器与控制器之间的通讯网络;() 6开关 K 作为控 2 制器 与传 感器 之间 的通 讯 网络 。如果 网络 数据 包 由通讯 网络 传 输 成功 时 ,则 视 为通讯 网络 ( 开关) 通 ;如 果 当网络 数据 包丢 失 时 , 接 则视 为 通讯 网络 ( 关) 开 ;如 果 当数据 包 的 丢失 率一 定 时 ,则 开 断 视 为网络 ( 关 )按一 定 的速 率 断 开与接 通 ;如果 当通 讯 网络 开 开
摘要 :NC 主要 通过 数 字通讯 网络 连接 方 式来 替代 传统 的 点与点之 间的连接 方 式 ,从 而构成 闭环控 制 系统 。在 Nc S s 中具有 各种 信 息 ,主要 包括 控 制器输 出、对 象输 出,通讯 网络 通过 控制 系统 中的各部 件 ,比如 传感 器 、执行 器 、控 制器之 间进行 交换 、 传输 。 网络控 制 系统在 进行 信 息传 输 时 ,存 在数 据 包丢 失 ,从 而 降低 控 制 系统 的性能 。本 文主要 针 对数 据 包
具有长时延和丢包的网络控制系统稳定性分析

( .东北 大 学 信 息科 学与 工 程 学 院 ,沈 阳 10 0 ;2 1 10 4 .重 庆 大 学 计 算机 学 院 ,重 庆 4 0 4 0 0 4;3 .湖 南 大 学 电气与信 息工程 学院 ,长 沙 4 0 8 ) 1 0 2
摘 要 :针 对 同时 出现 长 网络诱 导 时延和 丢 包的 网络 控制 系统 , 究 了带不确 定性 的 网络控 制 系统 的稳 定性 问 研
Absr c t a t: Fo e wo k c nr ls se t o g newo k—n c d tme d l y nd pa ke o s s ti a ri v siae tb — rn t r o to y t mswih ln t r idu e i e a s a c tls e ,h sp pe n e tg td sa i lt fu c ra n n t r d c nto y t ms iy o n e ti ewo ke o r ls se .M o ee y tm sa s n h o o y t c n tane yc n iurto v n ae d ld s se a n a y c r n uss sem o sr i d b o fg ain e e tr ts b s d o et i p c e o s r t . By usng y pu o t o a e n a c ran a k tl s a e i L a n v me h d, ln a t x n qu lt e c p in nd c mbii g a y i e r mar ie aiy d s r to a o i i n n s n— c r n usd na ia tb lt h o y,de ie u c e tc nd t nsf x n n ilsa lt fun e a n n t r o r ls se h o o y m c lsa iiy t e r rv d s f i n o ii ore po e ta tbii o c r i e wo k c nto y tm i o y t a d pr s n e he s o e o t r ns si n s c e s rt n u n y t m x on ni l t be. Fi ly,v rfe me c l n e e td t c p fdaa ta miso u c s ae e s r g s se e p e tal sa l i y nal e i d a nu r a i i e a l t ATLAB smu ai n ef cie s n e sblt ft i t d x mp ewih M i l to fe tv ne sa d fa i iiy o hs meho .
具有长时延和丢包的网络控制系统的故障检测
( .T e 8 R sa hIstt o C iaEet nc eh o g r pC roao , aj gJ n s 10 7 C i ; 1 h eer ntue f hn l r i T cn l yG o o rtn N ni i gu2 00 , hn 2 c i co s o u p i n a a
o v n s h n te e p n n ils b l y c n i o f h b ev rs se sg v n n e e t.T e h x o e t t i t o d t n o e o s r e y t m i ie .W h n a f uto c r ,t e o s r e a a i i t e a l c u s h b e v r r sd e c n c a g a i l o d tc h a l e i u a h n e r p dy t e e tt e fu t u r a x mp e s o h f cie e so e p o o e t o . .A n me i l a l h wst e ef t n s ft rp s d meh d c e e v h
ABS A CT: h a l d tci n p o l m f n t r e o to s se t o g t TR T e f ut ee t r b e o ewo k d c nr l d t r p u s d ly n aa d o o ti su id t d e .B s d o h x d r t ft e d t a k td o o t h t t o s r es o y tm r e in d a c r ig t a e n t e f e a e o h aa p c e r p u ,t e sae h e v r fs se a e d sg e c o d n o i
一类具有时延和数据包丢失的网络非线性控制系统
关于研究 同时具有网络时延和数据包丢失的文献较 少. 本文在张勇等 刮的研究基础上 , 讨论一类 同时 具有时延和数据包丢失 的网络非线性控制系统的建 模及其稳定性 的分析问题. 将数据包丢失看成一种
图 1 网络控 制系统 离散延时模型
设 图 1所示 的被控对 象 的状态 方程 描述 为
网络 控制 系统 是 将 控 制 系 统 的传感 器 、 行器 执
比 7 和 r 小很多 , - 。 而且可 以通过适 当的软硬件
设计 来进 一 步减 小 . 因此 , 常将 归于 或 者忽 通
和控制器等单元通过网络连接起来 的分布式控制系 统. 网络 控 制 系统 的主 要优 点 是 : 本 低 、 装 维 护 成 安 简单 、 系统可靠性高 、 灵活性高、 便于进行故障诊断 、 远程操作与控制 、 资源共享等. 但是 , 由于网络的引 入, 随之而来的网络诱导时延 、 数据包丢失和时序错 乱等问题也出现在控制系统中. 这无疑给系统的设 计和实施增加了复杂性 , 系统 的性能产生负面影 对 响, 甚至影响系统的稳定性. 因此 , 网络控制系统 对 中存在网络诱导时延和数据包丢失的稳定性分析及 其控制问题的研究具有重要的理论和实际意义【 J J. 到 目前为止 , 许多文献 主要研究具有不确定时
』 =x ) 曰(一), ,t 1 )A ( +l 7+( u ) ) ( l . x ,,(
1 系统 描 述 及 引 理
网络控制系统的结构如图 1 所示. 其中, 下 表示 传感器到控制器 的传输延迟 , 丁 表示控制器到执行
l 1t 一 ( , I L , ) ,W t I f , ( )2 ≤ 口 l 一‘ , v J ’I V , /cR , ∈[ + o , ’ , , I 2 ∈2 Vt , o]
具有时延和丢包网络控制系统的稳定性分析
极 易 出现数 据碰 撞 导 致 节 点竞 争 失 败 、数 据 传 输
与接 收 出 错 以 及 数 据 包 在 一 定 时 间 未 到 达 接 收端 ¨。
收 稿 日期 :2 1 0 2 。 0 0— 8— 7
k ) ( T 表示 经 由 网 包 丢失 、时钟 同步 和 数 据 安 全 等 ,如 果 不 能合 理 周 期传 感器 检测 输 出 ; ( T / k )
地解 决 这 些 问 题 ,将 会 使 系 统 性 能 受 到 严 重 络传 输 的控 制器 输入 ; ( T 表 示控 制器 计算 后 输 k)
的。在此 情 况 下 ,一 个 存 在 数 据包 丢 失 网络 ,可
以视 为按 一定 速率 切换 的开关 ,如 图 1 示 。 所
图 1 具 有 时 延 和 丢 包 的 网 络 控 制 系统
Fi 1 Ne wor c t ols se t g. t k on r y tm wih dea nd t o ut ly a da a dr po
5 0
电
力
科
学
与
工
程
2 1 年 01
5( 断开) (T/ (T : k ) ̄ k)=宝 ( 1 ) ( 一 ) / NS C 运行中,系统会发生的4种状态如表 1 爹( 1 的 关 系 C
网络控 制系 统 中所 传输 的 消 息具 有数 据 少 、传 输
周 期小 和实 时 性 要 求 高 等 特 点 。控 制 系统 引 入 网 络 后 ,网络 自身 特 点 就 将 不 可 避 免 地 造 成 网络 控
图 中 ,“ k ) 示第 k周期 经 由网络 传输来 的 (T表
网络化控制系统通信时延与丢包的分析和补偿
网络化控制系统通信时延与丢包的分析和补偿随着信息技术的进步,网络化控制系统正在广泛应用于各个领域,如工业自动化、智能交通、智能家居等。
然而,网络化控制系统面临着通信时延和丢包等问题,这对系统的实时性和可靠性提出了挑战。
因此,对网络化控制系统中通信时延与丢包进行深入分析并进行相应的补偿是非常必要的。
首先,我们来分析网络化控制系统中通信时延的影响。
通信时延指的是从发送控制信号到接收控制信号所需要的时间。
在网络化控制系统中,控制信号需要通过网络传输,而网络的带宽、传输速度以及网络拥塞等因素都会导致通信时延的增加。
通信时延的增加会导致控制信号无法及时到达执行器,从而影响系统的实时性和稳定性。
其次,我们来分析网络化控制系统中丢包问题的影响。
丢包是指在网络传输过程中,控制信号的某些数据包丢失。
丢包问题主要由于网络拥塞、信号干扰、传输错误等原因引起。
当控制信号的数据包丢失时,执行器无法正确接收到控制指令,从而导致系统无法正常工作。
丢包问题会严重影响系统的可靠性和精确性。
针对通信时延和丢包问题,我们可以采取一些补偿措施来提高网络化控制系统的实时性和可靠性。
首先,可以使用预测控制算法来预测通信时延,并在控制信号中加入补偿项,从而实现对通信时延的补偿。
其次,可以采用冗余传输和前向纠错等技术来解决丢包问题。
冗余传输即发送多份相同的控制信号,当某个数据包丢失时,执行器可以根据其他数据包进行恢复。
前向纠错则是在发送的数据包中添加冗余信息,接收器可以根据这些冗余信息进行错误纠正。
综上所述,网络化控制系统中的通信时延和丢包问题对系统的实时性和可靠性产生了影响。
针对这些问题,我们可以通过预测控制算法、冗余传输和前向纠错等技术进行补偿,从而提高网络化控制系统的性能。
未来,我们还可以进一步研究和改进这些补偿方法,以满足不同应用场景对网络化控制系统的要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 3 具有时延和数据包丢失的NCS简化模型 Fig. 3 Laconic Model of NCS with time-delay and data packet dropout
图3所示模型在事件S1 发生时, 有
x ˆk =
x((k − 1)h), kh < t < kh + τk , x(kh), kh + τk < t < (k + 1)h.
第 24 卷
假设离散控制器的控制律为
u(kh) = −K x ˆ(kh), k = 0, 1, 2, · · · .
(4)
则图3所示的闭环控制系统可用方程(5)(6)表示, 为了表示方便, 省略了采样周期h: ˜1 z (k ), S1 : z (k + 1) = Φ (5)
0, λmax (P ) > 0 [11] , 所以, 系统满足引理2的条件(8). 由定理1的条件(11), 可知系统满足引理2的条 件(9). 图3所示的系统, 当事件S1 发生时, 由式(5), 对 于Lyapunov函数V (z (k ))有 V (z (k + 1)) − V (z (k )) = z T (k + 1)P z (k + 1) − z T (k )P z (k ) = ˜T P Φ ˜1 − P )z (k ). −z T (k )(Φ
1
˜2 z (k ), S2 : z (k + 1) = Φ
其中:
T
(6)
z (k ) = [x(k ) x ˆ(k − 1)] , ˜1 = Φ − Γ0 (τk )K −Γ1 (τk )K , Φ I 0 ˜2 = Φ −Γ K . Φ 0 I
由定理1的条件(12), 有
−2 V (z (k +1)) − V (z (k )) z T (k )(α1 − 1)P z (k ) = −2 −2 (α1 − 1)z T (k )P z (k ) = (α1 − 1)V (z (k )).
1 引 言 (Introduction)
通过网络形成的闭环反馈控制系统称为网络控 制系统(networked control systems, NCS)[1∼6] . NCS与 传统的点对点结构的控制系统相比, 具有可远程操 作与控制、 可自行故障诊断、 系统配置灵活、 安装 与维护简便、 可靠性高等诸多优点[5∼7] , NCS在工 业控制领域中有着越来越广泛的应用, NCS将成为 工业自动控制系统的主流和重要发展方向. 但是, NCS各组件之间通过网络传输信息必然存在通讯 诱导时延, 通讯诱导时延的引入会降低NCS的性能 甚至引起系统不稳定, 也增加了NCS分析和设计的 难度, 基于多种理想假设的传统控制理论已不适用 于NCS[4,7] , 人们从多个角度研究NCS, 提出了以满 足系统稳定和动态性能为目标的新控制策略, 其中, 稳定性问题是NCS的一个最基本的问题. Branicky等[6] 用混合控制系统的分析方法研究
收稿日期: 2005−06−16; 收修改稿日期: 2006−04−18. 基金项目: 西安市科研基金资助项目(2002攻关第42号).
了网络诱导时延小于一个采样周期NCS的稳定性; Nillson等[2,3] 探讨了网络随机时延具有马尔可夫特 性的NCS, 将随机网络通讯时延的NCS归于线性二 次型Gauss最优控制问题(LQG), 给出了闭环NCS均 方稳定条件; 文献[6∼9]对NCS的稳定性问题也进行 了相关的研究; 以上研究只考虑存在网络诱导时延 的情况.樊卫华等[10] 研究了具有时延和数据包丢失 的状态反馈的NCS, 给出了一个NCS的稳定性判定 条件, 但没有分析数据包丢失率对NCS稳定性的影 响; Wei ZHANG等[5∼7] 分别讨论了仅有网络诱导时 延和仅有数据包丢失无网络诱导时延的NCS稳定 条件, 但没有讨论同时存在网络诱导时延和数据包 丢失的情况. 本文将单包传输的NCS建模为具有事 件约束的异步动态系统, 应用Lyapunov稳定性原理, 探讨了具有网络诱导时延和数据包丢失的NCS稳 定性, 给出了同时存在网络诱导时延和数据包丢失
其中: x(t) ∈ Rn 为系统的状态, u(t) ∈ Rm 为系统控 制输入, y (t) ∈ Rp 为系统输出, A, B, C 为适维常系 数矩阵. 对于图1所示的NCS作如下假设: 1) 传感器节点 由时间驱动, 以固定的周期h(h > 0) 对被控对象采 样, 并将采样数据(被控对象的状态量)封装在单个 数据包中发送到网络; 2) 离散控制器节点为事件驱 动, 离散控制器一旦成功接收到采样数据, 立刻计算 控制量并输出; 3) 零阶保持、 执行器节点也为事件 驱动, 零阶保持、 执行器一旦成功接收到控制量数 据, 立刻执行相应的动作; 4) 网络中数据的通讯存 在不确定时延, NCS中的总时延τk 主要包括3个部分: τk = τsck + τcak + τck , 其中: k 表示时延产生于第k 个 采样周期, τk 指传感器发送数据到零阶保持、 执行 器接收到数据间的时延, τsck 指传感器发送数据到 离散控制器接收到数据间的时延, τcak 指离散控制 器发送数据到零阶保持、 执行器接收到数据间的时 延, τck 是离散控制器的数据计算、 处理时延, τck 随所 执行操作的计算量不同而变化, 但实际上τck 比τsck , τcak 小很多, 而且可以通过适当的软、 硬件设计来进 一步减小, 因此可将τck 归于τcak 或者忽略[2,3] ; 5) 假 设0 τk h. 基于以上假设, 具有网络诱导时延和数据包丢失 的NCS可用图2所示模型表示. 图2所示模型中, 数据x(kh) 在通讯过程中, 不 仅 存 在 时 延, 而 且 还 会 出 现3种 情 况[10] : 1) 数 据 包成功传输; 2) 数据包尝试传输时, 网络被占用, 本次发送放弃; 3) 数据包已发送, 但在通讯过程 中丢失或时延过大.情况1)为成功传输, 标记为事 件S1 ; 情况2)和3)均为数据包丢失, 标记为事件S2 .
同理, 当事件S2 发生时, 由定理1的条件(13), 有
V (z (k + 1)) − V (z (k ))
3 稳 定 性 条 件(Stability criteria)
定义 1 若存在常数α > 1 , 对于动态系统的状 态变量xk , xk ∈ Rn , 若: lim αk xk | = 0 , 则称动
第3期
张喜民等: 具有时延和数据包丢失的网络控制系统稳定性
495
的NCS稳定的网络诱导时延条件和数据包丢失率条 件.
2
NCS建 模 (NCS modeling)
NCS的原型如图1所示[6] : 系统主要包括现场设 备(被控对象) 和离散控制器.
图2所示模型中, 数据uk 在通讯过程中, 也同样不 仅存在时延, 而且也会出现上述3种情况, 数据uk 在 通讯过程中事件S2 发生等同于数据x(kh)在通讯 过程中事件S2 发生. 根据以上分析, 可对图2所示 模型进行如下简化: 1) 将数据uk 的网络通讯时 延与数据x(kh)的网络通讯时延合并用总时延τk 表 示; 2) 将数据uk 在通讯过程中事件S2 发生归于数 据x(kh)在通讯过程中事件S2 发生; 3) 将数据uk 的 网络传输丢失率与数据x(kh)的网络传输丢失率合 并. 具有网络诱导时延和数据包丢失的NCS简化模 型如图3所示.
Stability of the networked control systems with time-delay and data packet dropout
ZHANG Xi-min1,2 , LI Jian-dong1 , CHEN Shi3
(1. State Key Lab.of Integrated Service Networks, XIDIAN University, Xi’an Shaanxi 710071, China; 2. The 631 Research Institute of China Aviation, Xi’an Shaanxi 710068, China; 3. Zhejiang Wanli University, Ningbo Zhejiang 315100, China)
第 24 卷第 3 期 2007 年 6 月
文章编号: 1000−8152(2007)03−0494−04
控 制 理 论 与 应 用
Control Theory & Applications
Vol. 24 No. 3 Jun. 2007
具有时延和数据包丢失的网络控制系统稳定性
张喜民1,2 , 李建东1 , 陈 实3
Abstract: This paper is concerned with the stability criteria for the single-packet transmission networked control systems with time-delay and data packet dropout. By modeling the networked control systems as an asynchronous dynamical system with rate constraints on events, the sufficient time-delay criterion and data packet dropout criterion for the exponential stability of the networked control systems are presented and proved by using the Lyapunov stability theory. The simulation with a practice example is given to show the effectiveness of our methods. Key words: networked control systems; time-delay; data packet dropout; stability