智能循迹小车电路原理图
循迹小车原理知识讲解

寻迹小车在历届全国大学生电子设计竞赛中多次出现了集光、机、电于一体的简易智能小车题目。
笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电路系统。
整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。
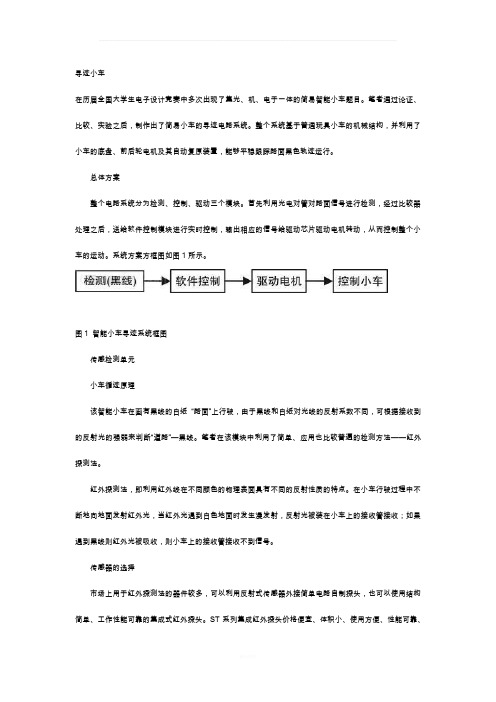
总体方案整个电路系统分为检测、控制、驱动三个模块。
首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。
系统方案方框图如图1所示。
图1 智能小车寻迹系统框图传感检测单元小车循迹原理该智能小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。
笔者在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。
在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。
传感器的选择市场上用于红外探测法的器件较多,可以利用反射式传感器外接简单电路自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。
ST系列集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部结构和外接电路均较为简单,如图2所示:图2 ST168检测电路ST168采用高发射功率红外光、电二极管和高灵敏光电晶体管组成,采用非接触式检测方式。
ST168的检测距离很小,一般为8~15毫米,因为8毫米以下是它的检测盲区,而大于15毫米则很容易受干扰。
笔者经过多次测试、比较,发现把传感器安装在距离检测物表面10毫米时,检测效果最好。
R1限制发射二极管的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为限流电阻,Vcc=5V作为电源电压,测试发现发射功率完全能满足检测需要;可变电阻R2可限制接收电路的电流,一方面保护接收红外管;另一方面可调节检测电路的灵敏度。
寻迹避障小车原理
循迹避障小车原理一)小车功能实现利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现小车能跟着白线(或黑线)行走,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开,绕开后继续寻迹。
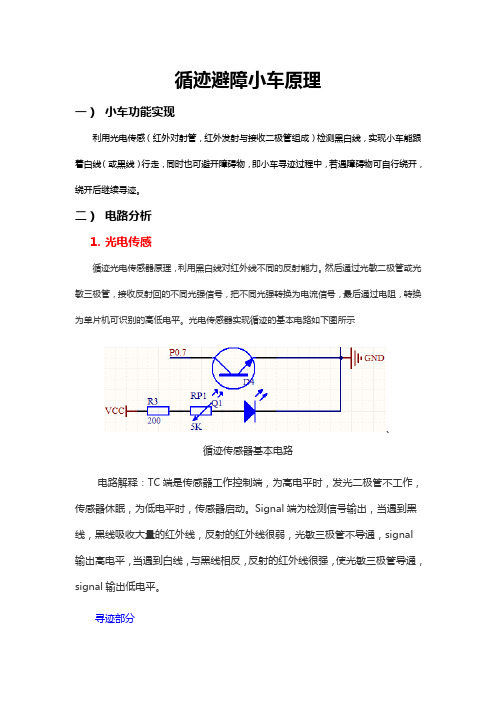
二)电路分析1.光电传感循迹光电传感器原理,利用黑白线对红外线不同的反射能力。
然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。
光电传感器实现循迹的基本电路如下图所示、循迹传感器基本电路电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动。
Signal端为检测信号输出,当遇到黑线,黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,signal 输出高电平,当遇到白线,与黑线相反,反射的红外线很强,使光敏三极管导通,signal输出低电平。
寻迹部分调整左右传感器之间的距离,两探头距离约等于白线宽度最合适,一般白线宽度选择围为3 –5 厘米比较合适。
注意:该传感器的灵敏度是可调的,偶尔传感器遇到白线却不能送出相应的信号,通过调节传感器上的可调电阻,适当的增大或减小灵敏度。
另外,循迹传感器的安放也算是比较有讲究的,有两种方法,一种是两个都是放置在白线侧但紧贴白线边缘,第二种是都放置在白线的外侧,同样紧贴白线边缘。
我们通常采用第二种方法。
编写程序使小车遇白线时,小车跟着白线走。
当小车先前前进时,如果向左偏离了白线。
那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐。
回到白线后。
两传感器输出信号为高电平。
小车前进。
如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐。
如此如此,小车必不偏离白线。
若小车的两对光电传感器同时输出的信号为高电平(黑底)或低电平(白底),即单片机判断的都为高电平或低电平,小车向前直走,在此过程中(直走)小车若遇白线,小车又重复上面动作跟着白线走。
循迹小车原理
寻迹小车在历届全国大学生电子设计竞赛中多次出现了集光、机、电于一体的简易智能小车题目。
笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电路系统。
整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。
总体方案整个电路系统分为检测、控制、驱动三个模块。
首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。
系统方案方框图如图1所示。
图1 智能小车寻迹系统框图传感检测单元小车循迹原理该智能小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。
笔者在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。
在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。
传感器的选择市场上用于红外探测法的器件较多,可以利用反射式传感器外接简单电路自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。
ST系列集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部结构和外接电路均较为简单,如图2所示:图2 ST168检测电路ST168采用高发射功率红外光、电二极管和高灵敏光电晶体管组成,采用非接触式检测方式。
ST168的检测距离很小,一般为8~15毫米,因为8毫米以下是它的检测盲区,而大于15毫米则很容易受干扰。
笔者经过多次测试、比较,发现把传感器安装在距离检测物表面10毫米时,检测效果最好。
R1限制发射二极管的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为限流电阻,Vcc=5V作为电源电压,测试发现发射功率完全能满足检测需要;可变电阻R2可限制接收电路的电流,一方面保护接收红外管;另一方面可调节检测电路的灵敏度。
智能小车之红外循迹以及红外避障模块电路设计

智能小车之红外循迹以及红外避障模块电路设计红外寻迹模块
红外避障模块
一。
原理图
红外寻迹模块
红外避障模块
红外发射管,红外接收管
比较器LM393输出低电平时,绿色指示灯亮,输出高电平时绿色指示灯灭。
当3脚的电压大于2脚电压时输出高电平。
3脚的电压小于2脚电压输出低电平。
电位器用来调整反向输入端的电压。
原理图基本相同。
二。
红外避障模块
发射管一直在发射红外光,当前面的障碍物越近,反射回来的红外光越强,红外接收管的EC电压越接近0V,那么就会小于LM393的2脚的电压,LM393输出低电平,绿色指示灯亮。
在实际使用中红外接收管工作在放大区,也就是说C点的电压在不断的变化。
所以我们调节LM393的2脚的电压来改变灵敏度。
三。
寻迹模块
利用对不同颜色的障碍物对红外光的反射能力不同。
白颜色对红
外光的反射能力最强,黑色对红外光的反射能力最弱。
当寻迹模块在黒线上的时候蓝色指示灯灭,当寻迹模块不在黒线上的时候蓝色指示灯亮。
如何判断寻迹模块是偏左还是偏右呢?
就需要3个这样的模块,当偏离到黒线的左边时,左边的模块和中间的模块蓝色指示灯亮,右边的指示灯灭。
同理,当偏离到黑线右边时,右边和中间的模块蓝色指示灯亮,左边的指示灯灭。
调节电位器可以调节灵敏度。
越靠近桌面,3脚的电压越低,越远离桌面,3脚的电压越高。
智能循迹小车精讲PPT课件

2024/1/27
22
地图构建技术探讨
增量式地图构建
随着机器人的移动不断更新地图信息。
多机器人协同建图
利用多个机器人的感知信息共同构建环境地 图。
2024/1/27
23
导航策略优化方向
动态避障
实时感知环境中的动态障碍物,并调整路径规划以避免碰撞。
2024/1/27
24
导航策略优化方向
多目标点导航
代码实现
在循迹算法的基础上,增加避障逻辑。当检测到障碍物时,根据避障策略调整小车的运动状态,同时更新路径信 息,确保小车能够安全地绕过障碍物并继续沿着预定路径行驶。
2024/1/27
15
调试技巧与经验分享
调试技巧
使用仿真工具进行前期验证,可以大大缩短开发周期;在实际调试过程中,可以采用分模块调试的方 法,逐一验证各个模块的功能和性能。
智能循迹小车精讲 PPT课件
2024/1/27
1
目 录
2024/1/27
• 智能循迹小车概述 • 智能循迹小车硬件组成 • 软件编程与算法实现 • 路径规划与导航策略 • 无线通信与远程控制 • 性能测试与评估指标 • 总结与展望
2
01
智能循迹小车概述
2024/1/27
3
定义与发展历程
2024/1/27
适用于无权图,能找到最短路径。
A*算法
引入启发式函数,提高搜索效率。
18
路径规划方法比较
RRT(快速扩展随机树)
通过随机采样构建路径,适用于高维空间和 复杂环境。
2024/1/27
PRM(概率路线图法)
构建连通图后进行路径搜索,适用于静态环 境。
19
循迹小车电路图
COR16 R16 1K COU5 U5
2
PIR1602
VCC_1
Header 6
1K
LED0
PISTC1029 30 PISTC1030
COR15 R15
PIR1502 PIR1501
29 31
PISTC1018 PISTC1019
18 19
1K
PIU204 PIU201
PIC1202 PIC1201
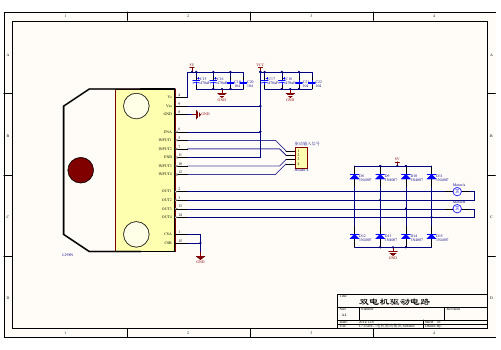
双电机驱动电路
Number 2014/12/6 C:\Users\..\电机驱动模块.SchDoc Sheet of Drawn By: 4 Revision
D
1
2
3
4 8V
COD1 D1
VCC_1
PID101 COµçÔ´½Ó¿Ú1 电源接口 1 PID102
COLM7805 LM7805
1 PILM780501
PISTC1021 PISTC1022
11 PIU3011 12 PIU3012 13 PIU3013 14 PIU3014 15 PIR1101 PIR1102 PIU3015 NLGNDPIU3016 16 GND COR11 10 R11
10 PIU3010
E DB0 DB1 DB2 DB3 DB4 DB5 DB6 DB7 BLA BLK
Header 4
PIL298N012
PID802
PID801
COD8 D8 1N4007
PID902
PID901
COD9 D9 1N4007
PID10 2
PID10 1
COD10 D10 1N4007
PID1 02
PID1 01
COD11 D11 1N4007 COMotorA MotorA
循迹小车原理

寻迹小车在历届全国大学生电子设计竞赛中多次出现了集光、机、电于一体的简易智能小车题目。
笔者通过论证、比较、实验之后,制作出了简易小车的寻迹电路系统。
整个系统基于普通玩具小车的机械结构,并利用了小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。
总体方案整个电路系统分为检测、控制、驱动三个模块。
首先利用光电对管对路面信号进行检测,经过比较器处理之后,送给软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。
系统方案方框图如图1所示。
图1 智能小车寻迹系统框图传感检测单元小车循迹原理该智能小车在画有黑线的白纸“路面”上行驶,由于黑线和白纸对光线的反射系数不同,可根据接收到的反射光的强弱来判断“道路”—黑线。
笔者在该模块中利用了简单、应用也比较普遍的检测方法——红外探测法。
红外探测法,即利用红外线在不同颜色的物理表面具有不同的反射性质的特点。
在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色地面时发生漫发射,反射光被装在小车上的接收管接收;如果遇到黑线则红外光被吸收,则小车上的接收管接收不到信号。
传感器的选择市场上用于红外探测法的器件较多,可以利用反射式传感器外接简单电路自制探头,也可以使用结构简单、工作性能可靠的集成式红外探头。
ST系列集成红外探头价格便宜、体积小、使用方便、性能可靠、用途广泛,所以该系统中最终选择了ST168反射传感器作为红外光的发射和接收器件,其内部结构和外接电路均较为简单,如图2所示:图2 ST168检测电路ST168采用高发射功率红外光、电二极管和高灵敏光电晶体管组成,采用非接触式检测方式。
ST168的检测距离很小,一般为8~15毫米,因为8毫米以下是它的检测盲区,而大于15毫米则很容易受干扰。
笔者经过多次测试、比较,发现把传感器安装在距离检测物表面10毫米时,检测效果最好。
R1限制发射二极管的电流,发射管的电流和发射功率成正比,但受其极限输入正向电流50mA的影响,用R1=150的电阻作为限流电阻,Vcc=5V作为电源电压,测试发现发射功率完全能满足检测需要;可变电阻R2可限制接收电路的电流,一方面保护接收红外管;另一方面可调节检测电路的灵敏度。
智能小车电路原理 ppt课件

(六)单片机最小系统
1.复位电路与时钟电路
2.数码管显示
数码管显示 P2
静态显示,写出显示段码?
(六)蜂鸣器与按键
蜂鸣器
按键
P0.6
P3.2
P3.4
有障碍物 INA = 0 无障碍物 INA = 1
P3.7=0 P3.7=1
(三)循迹电路
P3.5
P3.6
循迹模块
小车头 底部视图
白线 黑线
V2通 V2断
P3.5=0 P3.5=1
(四)蓝牙遥控
蓝牙接收模块硬件
HC-06 无线蓝牙串口透传模块 无线串口通讯 HC-06从机模块
(五)寻光模块
光敏电阻采集光信号,转换为电阻的变化,经与电路中的电阻串联,又转 化为电压的变化,与参考电压比较,得到一开关量。
智能小车
智能小车培训项目日程安排
时间 7.11上午
7.12 7.13~14 7.15~16 7.17上午 7.17下午
培训内容 方案与原理介绍 电路安装、小车装配、电路调试 原理图与PCB图绘制
软件设计 产品功能测试 设计报告撰写
组建学习团队:
一、设计任务
设计、制作、安装、调试一款智能小车,实现循迹、( 红外)避障、遥控、寻光等功能。
二、方案选择
1、循迹方案 方案一:用光敏电阻构成光敏探测器; 方案二:用红外发射管和接收管自己制作光电对管寻迹传感器; 方案三:用RPR220型光电对管。
2、避障: 红外传感器、超声传感器
3、遥控: 红外遥控、蓝牙遥控
4、寻光: 光敏电阻、红外对管
5、处理器:
电路框图
避障 模块
循迹 模块
处
遥控
模块