雷尼绍对刀仪参数设置
对刀仪使用方法精选文档

对刀仪使用方法精选文档TTMS system office room 【TTMS16H-TTMS2A-TTMS8Q8-对刀仪使用方法随着的广泛使用,许多用户也开始使用刀具装置。
它不仅可以检测刀具的磨损情况,而且可实现自动补偿(通过修改刀补值实现),极大的提高了加工效率和精度。
另外,同时使用其刀具破损检测功能与刀具寿命管理功能,还可以实现自动寻找同组刀具的功能,节约了刀具检查和更换的时间。
但由于用户对原理不是很了解,使用时容易产生误区,有时补偿后的精度反而不如补偿前,这就使用户产生了迷惑,限制了测量装置的广泛使用。
本文以英国" target="_ blank" class="keylink">雷尼绍()公司TS27 R测头的安装调试为例,就如何更好的使用刀具测量装置做一详细介绍,供读者参考借鉴。
刀具测量的基本原理是利用系统的跳步功能(G31):在程序中指令“G31 Zx x x Fx x x”(与GO1的动作相同)。
但此时如果SKIP信号由“0”变为“1”时,Z轴将停止运动,再用宏程序控制坐标轴后退,然后再次碰触量块,反复测量并运算后得出刀具的实际长度和直径,最后修改系统宏变量从而达到修改刀补值的目的。
刀具测量装置的使用主要包括三个步骤:安装和接线;标定;测量。
1 安装和接线刀具侧量装置通常包括测头和信号转换装置(硬件)及相关的测量程序(软件包)。
测头(TS27R)安装在工作台上,并尽量远离加工区域,外部应加防护装置,使用前先将防护装置打开并将刀具用风吹干净(用M代码控制气动元件可实现自动),确保刀具表面无杂物,测量完成后关闭防护。
测头安装完成后,首先要调整测头接触面的平行度和直线度。
将一只百分表(或千分表DTI)吸在头上,表头打在量块(圆形或方形)的上表面;用手轮控制X轴沿量块表面来回移动,观察表针变化,同时调整测头上的调节螺钉,使X向的直线度保证在0.010mm,调整好后紧固螺钉。
雷尼绍HPMA高精度自动对刀臂说明书

2
EC 符合性声明
Renishaw plc 公司声明以下产品: -
名称: 说明: 订货号:
HPMA 电动回转对刀臂 A-2181-XXXX 系列
按照以下标准进行制造: -
BS EN 61326-1:2006
测量、控制及实验室使用的电子设备 - EMC 要求 第一部分: 一般要求 抗扰: 表 2 - 工业场所 发射:A 类 - 工业场所
保修 属于保修范围的设备如需维修,必须返回供应商处进行处理。 如果错误使用设备、或经非公司授权人员维修调试后,Renishaw将不接受任何退换货要 求。
专利声明 以下专利涉及到本用户手册中提及的产品和其他类似产品(其他已申请的专利)的功能 特点:
CNw 03821790.2 EP 1092890 JPw 2002-531,839 JP 3847842 US 5,647,137 USw 7281336 B2
18
安装TSI3
安装TSI3
TSI3接口单元应该安装在CNC控制柜中。本单元放置的位置应尽可能远离变 压器和电机控制器等潜在干扰源。
4 mm
35 mm
R
130 mm
高度 98 mm
其他安装方式
M4
M4
TSI3 接口
19
TSI3接口
1 VIF 2 X-O
3 X+O
4 Z-O
5 Z+O
6 ARO
7 MRO
8 VIF 9 VIF 10 VM 10 0 VM 12 NC
13 0 VIF
接口24 V电源 18 V - 30 V X-输出 X+输出 Z-输出 Z+输出
5针M12面板安装电缆接头
33 30 67.5
自动对刀仪的设置与操作
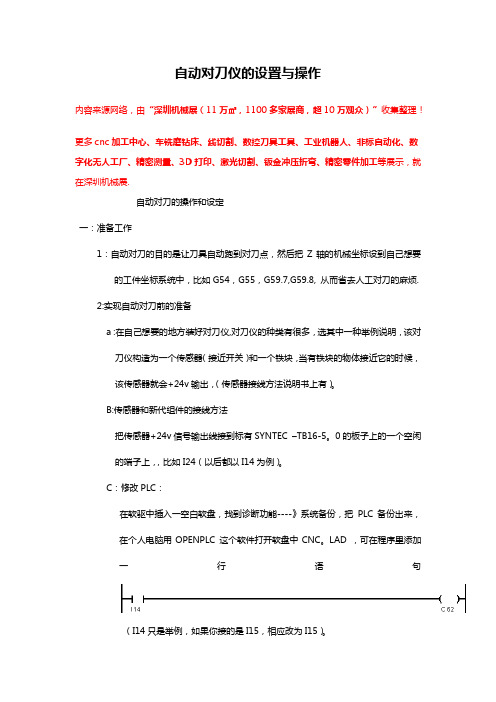
自动对刀仪的设置与操作内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.自动对刀的操作和设定一:准备工作1:自动对刀的目的是让刀具自动跑到对刀点,然后把Z轴的机械坐标设到自己想要的工件坐标系统中,比如G54,G55,G59.7,G59.8, 从而省去人工对刀的麻烦.2:实现自动对刀前的准备a :在自己想要的地方装好对刀仪,对刀仪的种类有很多,选其中一种举例说明,该对刀仪构造为一个传感器(接近开关)和一个铁块,当有铁块的物体接近它的时候,该传感器就会+24v输出,(传感器接线方法说明书上有)。
B:传感器和新代组件的接线方法把传感器+24v信号输出线接到标有SYNTEC –TB16-5。
0的板子上的一个空闲的端子上,,比如I24(以后都以I14为例)。
C:修改PLC:在软驱中插入一空白软盘,找到诊断功能----》系统备份,把PLC备份出来,在个人电脑用OPENPLC 这个软件打开软盘中CNC。
LAD ,可在程序里添加一行语句(I14只是举例,如果你接的是I15,相应改为I15)。
二,自动对刀的动作步骤:1,Z轴先向上跑到机械原点(目的是为了防止撞刀)。
2,Z轴在X,Y平面上移动到对刀仪的上方,(准备对刀)3,Z轴以第一段速率快进到对刀仪的铁块上方,改用慢速(第二段速率)慢慢接近铁块,把铁块往下压,一直到铁块靠近传感器,这时传感器红灯会亮,有+24v信号输入到I14,当控制器I14端子接受到信号后,Z轴此时会自动上升到机械原点,(这里采用两段速率的目的是第一段快进,节省时间,为了防止速度太快,把刀具撞坏,在快要接近对刀仪时慢速前进,这样就不会损坏刀具)。
4,当Z轴上升到机械原点后,这时,自动对刀的坐标就已经设到工件坐标系中了(这个程式是设到G59。
雷尼绍XL-80激光校准仪说明书

3
更轻巧的激光测量及校准
XL-80系统组件
XC-80补偿器和传感器
XC-80补偿器是XL系统测量精度的一个关键因素。
传感器电缆长5 m,可拧下,更换方便。在较长器上测量时,可用螺旋接头将多条电缆接在一起而加长。
可非常准确地测量空气温度、空气压力和相对湿度。
±6% 相对湿度
4
XL系统组件
三脚架和云台
除非您使用的是专用的测量台,否则您可能需要 一个三脚架和云台用于调节激光相对于待测轴的位置。 新型通用三脚架已经过广泛的测试,具有稳定的可调基 座,而且结构小巧、轻便。
XL三脚架云台在设计上考虑到了XL-80的精确角度 旋转及平移,可以一直固定在激光头上,易于存放和快 速架设。
雷尼绍的精度指标是根据公认的测量不确定度计算程 序 (EA - 4/02) 得出的激光稳频精度、传感器输出以及所 有影响最终测量结果的关键参数和计算值。可提供基于公 布指标的误差预算摘要。
目前,全球的安装使用数量已达数千套,我们的记录 显示雷尼绍的激光系统在不断满足各种条件下的使用要 求。这种性能水准已无数次得到第三方测试(包括国家 实验室)的验证。
由于设计周密,XL-80激光系统和光学镜组还可直 接放置在花岗岩工作台上(无需三脚架云台)进行坐标测 量机 (CMM) 的校准。
三脚架和三脚架便携箱合在一起仅重6.2 kg,与激 光系统其他组件的便携性很相配。
“快速安装/释放”机构可确保云台快速安全地固定 到三脚架上。对于那些不方便安装三脚架的应用,例如 直接固定在机床工作台上,则云台和激光系统也可用M8 螺纹的转接头固定在标准磁性座上。
其他同行厂家
雷尼绍XL-80
ºC 系统线性测量精度与环境温度
其他同行厂家
雷尼绍对刀仪宏程序
雷尼绍对刀仪宏程序
雷尼绍(Renesas)对刀仪宏程序是一种用于管理和控制数控
机床的编程语言。
它是由雷尼绍公司开发的专有语言,用于编写刀仪的控制程序。
刀仪宏程序的主要作用是实现刀具的换刀、测量、校准等功能,并将这些功能集成到刀仪系统中。
通过刀仪宏程序,操作员可以通过输入特定的指令来控制刀具的管理和操作,从而提高机床的效率和生产力。
雷尼绍对刀仪宏程序支持多种功能,包括自动刀具测量、刀位矫正、自动换刀等。
通过编写相应的控制程序,可以实现机床的自动化运行,减少人工干预,提高生产效率。
刀仪宏程序通常由专门的软件工程师编写,并根据具体的机床和生产工艺进行定制。
操作员通过机床的控制界面输入相应的指令,系统会根据刀仪宏程序执行相应的操作。
总而言之,雷尼绍对刀仪宏程序是一种用于管理和控制刀具的编程语言,通过它可以实现刀具的自动化管理和操作,提高机床的效率和生产力。
雷尼绍探头使用指南

安装指南OMP40-2光学机床测头© 2009-2015 Renishaw plc 版权所有本文档未经Renishaw plc事先书面许可,不得以任何形式,进行部分或全部复制或转换为任何其他媒体形式或语言。
出版本文档所含材料并不意味着Renishaw plc 放弃对其所拥有的专利权。
雷尼绍文档编号: H-4071-8518-04-A首次发布: 2009.02修订: 2015.05前言..........................................................................1.1前言 ......................................................................1.1免责声明 ................................................................1.1商标...................................................................1.1保修...................................................................1.1设备更改 ................................................................1.1数控机床 ................................................................1.1测头的保养 ..............................................................1.1专利...................................................................1.2 EC标准符合声明............................................................1.3废弃电子电气设备 (WEEE) 指令 ................................................1.3安全须知..................................................................1.4 OMP40-2基本介绍 .............................................................2.1简介 ......................................................................2.1入门...................................................................2.1系统接口 ................................................................2.1 Trigger Logic™(触发逻辑)................................................2.2测头模式..................................................................2.2可配置的设定 ...............................................................2.2开启/关闭方式 ............................................................2.2增强型触发滤波器 .........................................................2.4光学传输模式............................................................2.4光学功率 ................................................................2.4 OMP40-2尺寸..............................................................2.6 OMP40-2规格..............................................................2.6典型电池寿命 ............................................................2.7系统安装 ......................................................................3.1安装OMP40-2与OMM-2 / OMI-2T / OMI-2H / OMI-2 / OMI / OMM ......................3.1 OMM-2 / OMI-2T / OMI-2H / OMI-2 / OMI / OMM定位 .............................3.2OMP40-2安装指南ii目录与OMM-2 / OMI-2T / OMI-2H / OMI-2 配合使用的光学信号范围(调制传输)....................3.3 OMP40-2使用前的准备工作...................................................3.3安装测针 ................................................................3.3测针弱保护杆............................................................3.4安装电池 ................................................................3.5将测头安装到刀柄上 .......................................................3.6测针对中调整............................................................3.7标定OMP40-2 ..............................................................3.8为什么要标定测头? .......................................................3.8用镗孔或车削直径进行标定.................................................3.8用环规或标准球进行标定...................................................3.8标定测头长度............................................................3.8Trigger Logic™(触发逻辑) ..................................................4.1检查测头设定 ...............................................................4.1测头设定记录 ...............................................................4.2更改测头设定 ...............................................................4.4工作模式..................................................................4.6维护..........................................................................5.1维护 ......................................................................5.1清洁测头..................................................................5.1更换电池..................................................................5.2OMP40M 系统.................................................................6.1OMP40M 系统..............................................................6.1OMP40M 尺寸..............................................................6.1OMP40M 螺钉扭矩值 .........................................................6.2OMP40-2LS 系统..............................................................7.1简介 ......................................................................7.1与OMM-2 / OMI-2T / OMI-2H / OMI-2配合使用的光学信号范围(调制传输).............7.2查错..........................................................................8.1零件清单 ......................................................................9.1前言免责声明RENISHAW已尽力确保发布之日此文档的内容准确无误,但对其内容不做任何担保或陈述。
对刀仪使用方法
对刀仪使用方法随着加工中心的广泛使用,许多用户也开始使用刀具测量装置。
它不仅可以检测刀具的磨损情况,而且可实现自动补偿(通过修改刀补值实现),极大的提高了加工效率和精度。
另外,同时使用其刀具破损检测功能与刀具寿命管理功能,还可以实现自动寻找同组刀具的功能,节约了刀具检查和更换的时间。
但由于用户对测量原理不是很了解,使用时容易产生误区,有时补偿后的精度反而不如补偿前,这就使用户产生了迷惑,限制了测量装置的广泛使用。
本文以英国RENISHAWtml" target="_blank" class="keylink"> 雷尼绍(RENISHAW 公司TS27 R测头的安装调试为例,就如何更好的使用刀具测量装置做一详细介绍,供读者刀具测量的基本原理是利用系统的跳步功能(G31):在程序中指令“G31 Zx x x Fx xx” (与GO1的动作相同)。
但此时如果SKIP信号由“0”变为“ 1”时,Z轴将停止运动,再用宏程序控制坐标轴后退,然后再次碰触量块,反复测量并运算后得出刀具的实际长度和直径,最后修改系统宏变量从而达到修改刀补值的目的。
刀具测量装置的使用主要包括三个步骤:安装和接线;标定;测量。
1安装和接线刀具侧量装置通常包括测头和信号转换装置(硬件)及相关的测量程序(软件包)。
测头(TS27R)安装在工作台上,并尽量远离加工区域,外部应加防护装置,使用前先将防护装置打开并将刀具用风吹干净(用M代码控制气动元件可实现自动),确保刀具表面无杂物,测量完成后关闭防护。
测头安装完成后,首先要调整测头接触面的平行度和直线度。
将一只百分表(或千分表DTI)吸在主轴头上,表头打在量块(圆形或方形)的上表面;用手轮控制X轴沿量块表面来回移动,观察表针变化,同时调整测头上的调节螺钉,使X向的直线度保证在0.010mm调整好后紧固螺钉。
再控制Y轴沿量块表面来回移动,同时调整测头上的调节螺钉,使Y向的直线度也保证在0.010mm,调整好后紧固螺钉。
雷尼绍探头设定及使用
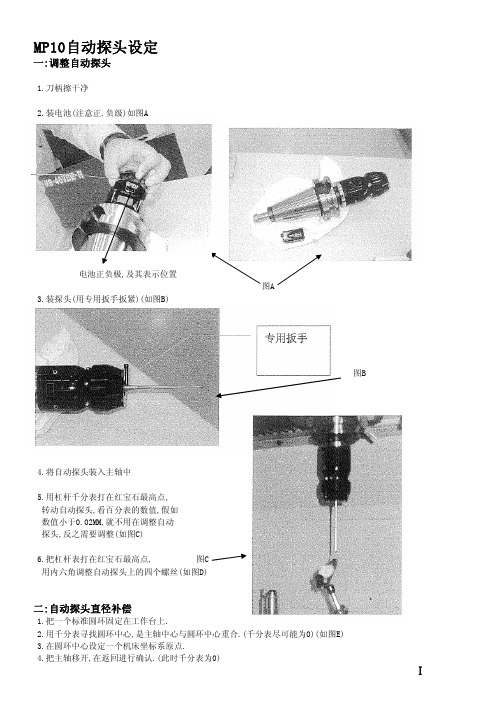
MP10自动探头设定一:调整自动探头1.刀柄擦干净2.装电池(注意正.负级)如图A电池正负极,及其表示位置图A3.装探头(用专用扳手扳紧)(如图B)图B4.将自动探头装入主轴中5.用杠杆千分表打在红宝石最高点,转动自动探头,看百分表的数值,假如数值小于0.02MM,就不用在调整自动探头,反之需要调整(如图C)6.把杠杆表打在红宝石最高点, 图C用内六角调整自动探头上的四个螺丝(如图D)二:自动探头直径补偿1.把一个标准圆环固定在工作台上.2.用千分表寻找圆环中心,是主轴中心与圆环中心重合.(千分表尽可能为0)(如图E)3.在圆环中心设定一个机床坐标系原点.4.把主轴移开,在返回进行确认.(此时千分表为0)Ⅰ调整螺丝位置图D 图E (FM MP3的调整螺丝在圆锥盖得里面)5.把自动探头放入主轴中,走到设定的原点(如图F)6.在MDI方式下,输入CALL OO18,启动.(自动探头加电,会有几秒的延时) (FMMP3输入 : CALL OO16)7.把自动探头下降到基准圆环平面以下10MM左右.8.在MDI方式下,输入CALL OO21,启动.(将设定的原点读入MSB原点)9.画面放在"测量结果显示",按"MSB原点"(MSB原点坐标,No.3号坐标系).10.输入VNCOM[1]=8,启动.11.将画面放在"测量结果显示"按"传感器",用手轻碰探头,看到传感器画面有黄色的指示灯会亮,进行信号确认,表示探头有信号.12.在MDI方式下,输入:CALL OO10 PMOD=9 PDI=50 POVT=3 启动.PMOD=9 表示自动探头半径补偿 PDI=50 表示基准环的准确直径 POVT=3表示超行程距离13.测量结果在"测量表示画面",按"MSB刀具ON/OFF"键.半径补偿的1-4号半径补偿值为探头4个方向的补偿值.14.在MDI方式下,输入:CALL OO19 启动(表示断电)(FMMP3输入:CALL OO17)三:自动探头长度方向补偿1.换基准棒.(记下标准棒的长度,假如为199.9MM)2.将基准棒的端面与量块轻微接触到(如图G).3.在此位置设定Z方向的原点.a.绝对长刀具补偿:运算199.9b.相对刀具补偿:运算04.抬起基准刀具,主轴换上自动探头.5.在MDI方式下输入:CALL OO18 启动 <VNCOM[1]=8检测信号>6.在手动方式下,将自动探头放在量块的上方,大约10MM左右(如图F).* 相对补偿,PLI=自动探头长度-基准棒长度(大概距离)9.CALL OO19 (自动探头断电)四:复制补偿数值图F1.将"MSB刀具ON/OFF"中的,半径补偿1-4号复制到5-20号,长度补偿的5号复制的1-4号.2.在MDI方式下,输入:CALL OO22 Ⅱ间距10MM左右 图G 图H使用自动探头一:内径测量1.探头放在孔的中心位置(大概),把探头的顶端移到孔内.2.MDI方式下:输入 CALL OO18 启动(FMMP3输入CALL OO16)3.测量: CALL OO10 PMOD=7 PDI=50 启动 .(PMOD=7表示测量孔德半径.PDI=50表示孔直径的预想值) 4:测量结果在"测量结果显示"中.5.设定孔中心为原点: CALL OO20 PHN=3 PX=0 PY=0 启动.(PHN=3表示为3号坐标系,PX,PY表示X与Y偏移量) 6:在MDI方式下,输入: CALL OO19 启动(FMMP3输入:CALL OO17)二:外径测量1.探头放在孔的中卫,并且在零件的上方.2.CALL OO18启动.3.测量: CALL OO10 PMOD=6 PDI=100 PIN=25 启动 (PMOD=6表示测量外径 PDI=100表示外径的预想值 PIN=25表示从探头顶端下降25mm.)4.以下操作同测内径操作.三:X向的端面测量 1.探头放在离被测平面不远的地方.2.在MDI方式下,输入: CALL OO10 PMOD=1 PEI=-255 启动 .(PEI=-255表示X向的预想值,预想值=当前位置+到被测面得距离) 3.设原点同上,设好原点后,再次确认,输入:CALL OO10 PMOD=1 PEI=0启动 PEI=0表示确认面与测量面差值为0.四:Y向端面测量1.测量:CALL OO10 PMOD=2 PEI=800 启动2.设原点和再次确认操作步骤同上.五:Z向测量.1.探头方在被测零件平面的上方.2.在MDI方式下,输入: G56H5 启动,HS=5表示MSB刀具长度补偿为五号.3.测量:CALL OO10 PMOD=3 PEI=-111 启动4.设原点和再次确认同上.六:测量两点间的距离探头放在被测量两点的大约中间位置.*X向测量:CALL OO10 PMOD=11 PELI=60 启动 *Y向测量:CALL OO10 PMOD=12 PELI=85 启动七:测量两端面的距离探头放还在被测两端面的中间,并放在零件的上面.* X向测量:CALL OO10 PMOD=11 PELI=130 PIN=30 启动* Y向测量:CALL OO10 PMOD=12 PELI=130 PIN=30 启动END Ⅲ。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第53行
第54行
第55行
第56行
第57行
第58行
第59行
半径大于50单边测刀径
50
含义 激光X方向位置 激光Z方向位置 激光Y方向位置
singel 最大刀长 最小刀长 最大刀径 安全距离(Y方向机械坐标) 接近距离 偏差值超过最大设定值报警 回退系数
1表示允许标定0不允许
值
0 100
1 2 0.05 0.05 1
1
1
25 1000
第47行
第48行
第49行
第50行
第51行
第52行
参数行数 第1行 第2行 第3行 第4行 第5行 第6行 第7行 第8行 第9行 第10行 第11行 第12行 第13行 第14行 第15行 第16行 第17行 第18行 第19行 第20行 第21行 第22行 第23行 第24行 第25行 第26行 第27行 第28行 第29行 第30行 第31行 第32行 第33行 第34行 第35行 第36行 第37行 第38行 第39行 第40行 第41行 第42行 第43行 第44行 第45行 第46行