最新4WD差速器运动特性
玩转四驱(1) 四驱基础知识讲解篇
玩转四驱(1)四驱基础知识讲解篇四驱,是一个很值得讨论的话题,我们在大街上经常能看到贴着4×4或AWD商标的汽车。
相信“四驱”这个概念在每个网友心里都有不同的解释,其实很简单,就是四个车轮都有动力的车就是四驱汽车。
但是要是再往进一步说,四驱车的结构都是一样的嘛?为什么有些恶劣地形有的四驱车能过去有的四驱车过不去?发烧级的四驱车仅仅是外观比较威猛?如果您对这些问题还有疑问,不用着急,在这里可以让您对四驱的一切变得明晰。
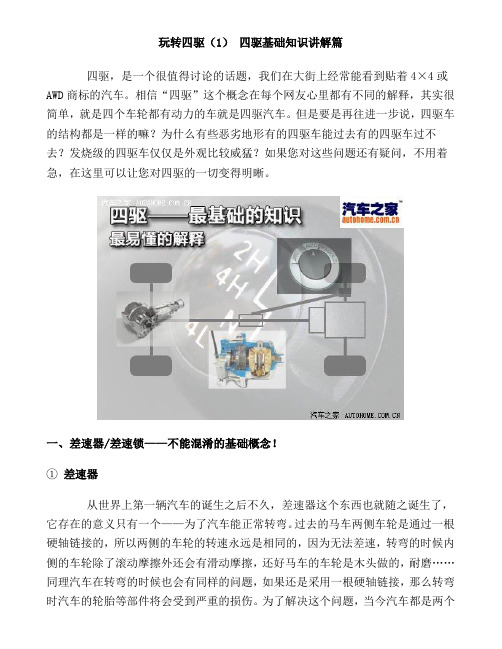
一、差速器/差速锁——不能混淆的基础概念!①差速器从世界上第一辆汽车的诞生之后不久,差速器这个东西也就随之诞生了,它存在的意义只有一个——为了汽车能正常转弯。
过去的马车两侧车轮是通过一根硬轴链接的,所以两侧的车轮的转速永远是相同的,因为无法差速,转弯的时候内侧的车轮除了滚动摩擦外还会有滑动摩擦,还好马车的车轮是木头做的,耐磨……同理汽车在转弯的时候也会有同样的问题,如果还是采用一根硬轴链接,那么转弯时汽车的轮胎等部件将会受到严重的损伤。
为了解决这个问题,当今汽车都是两个半轴的设计,将两个半轴链接起来的就是差速器,有了差速器也就允许两侧车轮有转速差。
『直行状态下差速器不工作』『转弯状态下差速器工作』能达到实现两侧车轮转速不一样,最重要的是差速器里面的一组行星齿轮。
为了通俗易懂,我们做一个比喻:差速器壳体里面的一组行星齿轮就可以抽象地看作为只有一个齿的“齿轮”,也就是一根棍子,这个棍子可以链接两侧的半轴,并带动两个半轴旋转。
注意,这个棍子除了随着传动轴公转,同时还可以自转。
如果两侧的车辆受到的摩擦力是相同的,那么这根棍子就不会有自转,即两侧车轮转速也相同;如果有一侧车轮受到的摩擦力大于另一侧,那么这根棍子本身就会发生自转,这样在不改变公转转速的情况加上自转,就可以达到两侧转速不一样的目的。
也就是说,如果一侧的轮子被卡死不能转动了,那也无妨,虽然动力依然存在,但这个会自转的棍子就会带动那个没有被卡死的轮子转动。
quattro和4motion有什么区别
文章要点:Quattro、4Motion分别是奥迪与大众四驱品牌商标,不代表核心技术两品牌的四驱核心差速系统与发动机布置形式有关中央差速器:Torsen(托森)为纯机械式,Haldex(瀚德)为机电一体式提到四驱,我想大家并不陌生。
从上世纪70年代北京212吉普车上的“4*4”,到现在花样繁多贴在汽车尾部的Quattro、4 Motion、4 MATIC、Xdrive等等标识,似乎四驱已经成了“好车”的代名词之一。
同时四轮驱动轿车也越来越常见,可以说四驱汽车凭借其良好的操控性和通过性能成为汽车发展的一种趋势。
那么形形色色的四驱技术究竟差别在哪儿?在实际使用中各自的表现又如何?从本期开始,小编就跟您聊聊咱们身边的四驱。
第一篇:Quattro Vs 4MotionQuattro、4Motion是奥迪和大众公司四驱技术的注册商标,值得注意的是仅凭Quattro或4Motion并不能完全绝对地表示四驱系统的核心技术。
因为同为大众旗下的奥迪与大众品牌技术共享,因而两种不同品牌的四驱系统在某些车型上的核心技术可能是一样的:如大众辉腾和奥迪A8这两款纵置发动机轿车,其四驱系统均以Torsen(托森)中央差速器为核心。
了解这些之后,我们再来看看Quattro和4Motion 究竟有何异同。
四驱车型尾部标识及奥迪A8与大众辉腾Quattro1980年,第一辆奥迪Quattro在日内瓦车展的亮相标志着Quattro全时四轮驱动技术的诞生。
在30年的历史中,奥迪Quattro全时四驱系统经历了6次革新,成为反应迅速、稳定可靠的四驱技术代表。
其核心为纯机械结构的Torsen(托森)中央差速器。
4Motion1986年大众公司率先在GOLF车型上配备的“syncro”四驱系统就是今天4Motion 的前身,当时以硅油粘性耦合器作为限滑传动装置。
1998年公司引进瑞典Haldex 耦合器,从此采用Haldex限滑技术的四驱系统被命名为4Motion。
几种常见四轮驱动的区别
几种常见四轮驱动的区别Quattro/4WD/AWD/xDrive类型一:QuattroQuattro全时四轮驱动的核心是Torsen中央差速器,他比任何电子控制技术更快的调节前后轴力量的分配。
EDL(电子差速锁)在必要时将多余的动力传送到车轮上,增强抓地性。
当车轮空转或者没有与地面接触时,这些浪费的驱动力就被输送到可以受力的车轮上。
一旦出现外部条件引起的前后轴的速度差异,Torsen就会自动地,毫无损失的将大部分的能量传输到有能力工作的驱动轴上,自动优化和分配四个车轮的动力。
由于轴荷的平衡分布,驾驶者能够更好的掌握转向的精确性和灵活性,而不需要扭矩转向辅助。
25年前,奥迪的工程师以quattro全时四轮驱动,在驱动技术领域树立了里程碑。
类型二:4WD(4X4)/AWD/ xDrive/sDrive四轮驱动系统(4wd系统,车身上标识4X4与4WD意思一样)是将发动机的驱动力从2wd系统的两轮传动变为四轮传动。
4wd系统之所以列入主动安全系统, 主要是4wd系统有比2wd 更优异的发动机驱动力应用效率, 达到更好的轮胎牵引力与转向力的有效发挥。
就安全性来说,4wd系统对轮胎牵引力与转向力的更佳应用, 造成好的行车稳定性以及循迹性。
除此之外4wd系统更有2wd所没有的越野性。
AWD (全时四驱系统)已经变得和4WD 几乎一样了,唯一的区别就在于AWD 比4WD 少了低比率的传动装置,不过AWD 仍然提供在湿滑路面、恶劣天气以及轻微越野路面的牵引能力。
但实际情况是,对一辆车的越野能力起决定性作用的是车辆的离地高度而非AWD 能力。
所有的AWD 系统是全时四轮驱动的,这也就意味着你不用进行2 轮驱动或者全轮驱动模式的转换。
而宝马的xDrive、奔驰的4MATIC与AWD一样是全时四驱系统,仅仅是称呼不一样,而sDrive则为后驱系统。
不管是4WD还是AWD,最最本质的东西就是功率分配是如何达成的。
目前市场上最优秀、最聪明的扭矩分配装置非托森(Torsen)莫属。
丰田普拉多四轮驱动系统原理

丰田普拉多四轮驱动系统原理丰田普拉多(PRADO)是丰田陆地巡洋舰系列中的最新款SUV。
这款全新开发的新一代SUV,配备了丰田全新4.0L V6发动机,排放达到欧Ⅲ标准。
普拉多(PRADO)先进的发动机提供强劲的动力输出,配以坚固的车架以及强化的悬架系统,使崎岖的路途变得舒适顺畅。
作为一款越野车,四轮驱动系统可谓是重中之重。
本文将着重为您介绍普拉多(PRADO)装备的全时四驱系统。
对于普通的锥形齿轮式差速器,不论是轮间差速器还是中间差速器,由于行星齿轮在吸收转速差时因自转而产生的内摩擦力很小,如果不对其进行限制或锁止,只要有一侧(或一轴)车轮滑转,则另一车轮(或车轴)的驱动力也会被限制到与滑转一侧车轮(或一轴)的驱动力相等,不能充分发挥轮胎的抓地力,影响汽车的越野性。
普拉多(PRADO)的底盘系统采用了全时驱动方式,布置了3个差速器:前、后差速器采用普通锥形齿轮式差速器,无差速限制和锁止装置,左、右两侧车轮的滑转通过TRC/VSC系统以制动方式来限制;中间差速器采用托儿森(TORSEN)T-3型限滑差速器。
国产的一汽丰田普拉多(PRADO)采用4BM分动器,可以实现对差速器的电控锁止。
全时四驱系统的基本构成丰田普拉多(PRADO)四驱传动系统的机械部分主要由变速器、分动器(可电控锁止差速器)、前后传动轴及前后差速器等组成(图1)。
四驱的电控部分由制动控制ECU、发动机ECU、中间差速器锁止按钮、驻车及空挡位置开关、4WD 控制ECU和分动器电控执行器等组成。
分动器电控执行器根据驾驶员的操作意愿(中间差速器锁止按钮)、汽车制动状态、发动机运行转速状态、变速器挡位状态等信号对分动器内的差速器进行锁止控制。
这样做的目的是为了便于驾驶员操作,确保分动器内的传动切换准确有效,避免由于误操作而造成的机件损坏.丰田普拉多(PRADO)是丰田陆地巡洋舰系列中的最新款SUV。
这款全新开发的新一代SUV,配备了丰田全新4.0L V6发动机,排放达到欧Ⅲ标准。
四驱车的工作原理
四驱车的工作原理四驱车,顾名思义就是指具有四个驱动轮的汽车。
相比于普通的两驱车辆,四驱车在越野、恶劣路况下具有更好的通过性和牵引力。
那么,四驱车是如何实现四个驱动轮的协同工作的呢?下面我们就来详细介绍一下四驱车的工作原理。
四驱车的工作原理主要分为机械式四驱和电子式四驱两种类型。
在机械式四驱系统中,通过一系列的机械传动装置将动力传递到四个车轮上,而在电子式四驱系统中,则是通过电子控制单元对发动机输出的动力进行智能分配,以实现四个驱动轮的协同工作。
首先我们来介绍机械式四驱系统的工作原理。
在机械式四驱系统中,通常会采用传统的传动轴和差速器来实现四个驱动轮的联动。
当车辆行驶时,发动机输出的动力首先通过变速器传递到传动轴上,然后再通过传动轴传递到前后桥上。
在前后桥上,通过差速器将动力分配到左右两侧的车轮上,从而实现四个驱动轮的协同工作。
在恶劣路况下,当其中一个车轮出现打滑时,差速器会自动将更多的动力传递到另外一个车轮上,以确保车辆能够顺利通过障碍。
而在电子式四驱系统中,一般会采用多重传感器和电子控制单元来实现对动力的智能分配。
当车辆行驶时,传感器会实时监测车辆的速度、转向角度、车轮转速等参数,并将这些数据传输给电子控制单元。
电子控制单元根据这些数据进行智能分析,并通过控制多个电动执行器来实现对车辆四个驱动轮的动力分配。
这种智能分配的方式可以更加精准地控制每个车轮的牵引力,从而使车辆在复杂路况下能够更好地通过障碍。
无论是机械式四驱系统还是电子式四驱系统,它们都能够有效地提高车辆在恶劣路况下的通过性和牵引力。
然而,四驱系统也并非万无一失,它同样存在一些缺点。
首先,四驱系统会增加车辆的整体重量,从而导致燃油经济性下降。
其次,四驱系统的维护成本较高,因为它涉及到更多的传动装置和传感器。
另外,四驱系统在普通路况下并不会发挥出它的优势,反而会增加车辆的制动距离和转向半径。
总的来说,四驱车的工作原理主要分为机械式四驱和电子式四驱两种类型。
分时适时全时 四种特殊四驱系统详解
分时?适时?全时? 四种特殊四驱系统详解其实判断四驱类型,从前后桥动力分配的结构上就能一目了然:1、典型的分时四驱,比如说吉普牧马人,动力从变速箱出来后,硬连接后桥,平常就是个后驱,需要四驱的时候,前桥靠齿轮或链条直接和后桥挂成一个整体,前后桥转速相同。
它的分动箱,就像个开关,前桥只有硬连上和分开两种状态,操作的时候必须停车。
分时四驱的名称就是这么来的:要么分开,要么连上。
这种四驱,平常公路行驶时可以后驱行驶节省燃油,越野时挂上前桥,前后桥转速相同越野能力强大无比,而且这种结构连接强度大,越野时长时间高强度使用也没问题。
缺点呢,就是没中央差速器,四驱时前后桥硬邦邦连在一起,拐不过弯,公路上四驱根本没法用。
2、适时四驱,比如说奇骏、途观、RAV-4、CR V,动力从变速箱出来后,硬连接前桥,后桥的动力是从前桥上取的。
不过和分时四驱有个区别,后桥从前桥取动力的时候,要通过一个装置,这个装置种类比较多,有的是电控多片离合器,有的是粘性联轴节等等。
奇骏的这个电控多片离合器可人工和自动控制,彻底分开就是前驱、彻底结合就是LOC K模式。
这两种模式和分时四驱的2驱和4驱模式相同,但是通过多片离合器的半结合状态,可以给后桥适当分配一些动力,而且是可以动态调整的。
适时四驱的名称也是这么来的:车辆行驶的时候可以根据情况动态调整四驱。
可这种四驱,结构非常简单,能实现的四驱功能全面。
而且后桥就是个单独的附加装置,所以这种车型简单地去掉后桥驱动装置就变成两驱型号,适应更多的客户需求。
缺点就是能实现的四驱功能虽然全面,但样样都不精,锁定的时候没有分时四驱强度大,越野时根本不抵用。
公路时电控多片离合器和粘性联轴节调节后桥转速反应太慢。
只适合偶尔的低强度使用,用在城市SUV上倒是比较合适。
上面说的这两种四驱,有5个重要注意点:1、前后桥在动力分配上不是平等的,某个桥(分时四驱大部分是前桥,适时四驱大部分是前桥)是从变速箱直接取来动力,我们称之为驱动桥。
四驱车多片离合差速传动与控制[宝典]
![四驱车多片离合差速传动与控制[宝典]](https://img.taocdn.com/s3/m/e1ccf21bc8d376eeafaa31da.png)
四驱车多片离合差速传动与控制[宝典] 四驱车多片离合差速传动与控制一(四驱系统四驱系统一般分为:全时四驱、分时四驱和适时四驱。
全时四驱指的是车辆在整个行驶过程中一直保持四轮驱动的模式。
这种驱动模式拥有较好的越野和操控性能,但它不能根据路面情况做出扭矩分配的调整,油耗偏大,经济性差。
分时四驱是由驾驶者手动切换的驱动模式,驾驶者可通过接通或断开分动器来选择两轮驱动或四轮驱动模式。
这是SUV车型中最常见的驱动模式,其优点是既能保证车辆的动力性和通过性,又能兼顾燃油经济性,略显不足的是驾驶者需要自行判断路况,手动操作驱动模式。
适时四驱又称为实时四驱,是最近几年发展起来的技术,它由电脑芯片控制两驱与四驱的切换。
该系统的显著特点就是它在继承全时四驱和分时四驱的优点的同时弥补了它们的不足。
它能自行识别驾驶环境,根据驾驶环境的变化控制两驱与四驱两种模式的切换。
在颠簸、多坡多弯等附着力低的路面,车辆自动设定为四轮驱动模式,而在城市路面等较平坦的路况上,车辆会自行切换为两轮驱动。
二.多片离合器式差速器多片离合器式差速器依靠湿式多片离合器产生差动转矩。
这种系统多用作适时四驱系统的中央差速器使用。
其内部有两组摩擦盘,一组为主动盘,一组为从动盘。
主动盘与前轴连接,从动盘与后轴连接。
两组盘片被浸泡在专用油中,二者的结合和分离依靠电子系统控制。
在直线行驶时,前后轴的转速相同,主动盘与从动盘之间没有转速差,此时盘片分离,车辆基本处于前驱或后驱状态,可达到节省燃油的目的。
在转弯过程中,前后轴出现转速差,主、从动盘片之间也产生转速差。
但由于转速差没有达到电子系统预设的要求,因而两组盘片依然处于分离状态,此时车辆转向不受影响。
图1 前、后轴之间的多片离合器式差速器-模型图当前后轴的转速差超过一定限度,例如前轮开始打滑,电控系统会控制液压机构将多片离合器压紧,此时主动盘与从动盘开始发生接触,类似离合器的结合,扭矩从主动盘传递到从动盘上从而实现四驱。
现代汽车驱动控制系统的新技术盘点

现代汽车驱动控制系统的新技术盘点肖九梅【期刊名称】《办公自动化(办公设备与耗材)》【年(卷),期】2016(000)010【总页数】6页(P14-19)【作者】肖九梅【作者单位】【正文语种】中文如今汽车底盘控制技术正向电子化、信息化、网络化、集成化方向发展,现代汽车越来越多的新技术被应用于驱动控制系统中。
这些新的底盘驱动控制技术在汽车的安全性、动力性、操作稳定性等方面起着重要的作用。
它包括四轮驱动系统(4WD)、加速防滑控制系统、限滑差速器及锁定系统、动态稳定辅助控制系统和动态稳定牵引控制等等。
现代汽车驱动控制系统新技术的研发,都会带动汽车底盘控制技术向更高层次的发展。
所谓4轮驱动系统,又称全轮驱动系统,是指汽车前后轮都有动力。
可按行驶路面状态不同而将发动机输出扭矩按不同比例分布在前后所有的轮子上,以提高汽车的行驶能力。
一般用4×4或4WD来表示,如果一辆车上标有上述字样,那就表示该车辆拥有4轮驱动的功能。
一般的越野车,变速器后面装有手动分力器,前后车轴各装一个称为驱动桥的部件。
变速器输出的扭矩通过分力器和传动轴,分别传递到前后车轴上的驱动桥,再通过驱动桥将扭矩传递到轮子上。
而在轿车上,由于轿车的车架结构与越野车的车架结构有所不同,作用目的也有差异,所以轿车上的四轮驱动装置是常啮合式,增加了粘性偶合器,省去了手动分力器,自动将扭矩按需分配给前后轮子。
现代轿车的马力都比较大,加速时重心后移,造成前轴轻飘。
这对于前轮驱动的轿车来讲,即使在良好的路面上车也会打滑,四轮驱动可以防止这种现象发生。
所以,轿车应用四轮驱动,主要作用是提高车辆的加速性能。
目前四轮驱动的车辆,发动机以前置或者中置为主。
前置发动机的车辆重量分配到前后轴上大致相同,两轴的驱动力矩大约是45∶55到40∶60,中置发动机的车辆,全车重量在前后轴上的分布大约是40∶60,两轴的驱动力矩大约是35∶65到30∶70。
这两类车辆前后轴之间有差速器和粘性耦合器,哪一个轴的轮子打滑,可以通过耦合器的粘性液体把它的部分驱动扭矩传送到不打滑的车轮上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4W D差速器运动特性
●差速器的运动特性、转矩分配特性和锁紧系数的概念
对于对称锥齿轮差速器而言,在左右半轴相同转速的情况下,行星齿轮仅公转不自转,左右半轴得到的转矩是平均分配的。
而当左右半轴有一侧转速较慢时,行星齿轮在公转的同时开始沿着转速慢的一侧半轴齿轮滚动,绕行星齿轮轴开始自转,另一侧半轴则加速旋转(两半轴转速之和恒定等于两倍差速器壳体转速),由于行星齿轮的自转,其受到一个反向的摩擦力矩MT,这个摩擦力矩使行星齿轮分别对左右半轴附加作用了大小相等方向相反的两个圆周力F1和
F2,在左右半轴齿轮上产生的圆周力使得左右半轴转矩分配发生变化,转动慢的一侧转矩增加。
●差速锁、防(限)滑差速器...
关键点在于上一页式子里的MT,对称锥齿轮差速器的内摩擦力矩MT通常很小,因此左右半轴转速不同时,转矩分配的程度有限,锁紧系数K值通常在0.05~0.15之间,左右半轴转矩比(M2/M1)通常在1.1~1.4之间,所以这种差速器基本上可以认为转矩在任何情况下都是平均分配的。
而这种转矩平均分配的特点,决定了这类差速器在左右车轮附着系数有明显差别时的情况。
『正是因为对称式锥齿轮差速器平均分配的特性,所以会出现一侧车轮空转而另一侧附着力良好车轮却无法前进的情况』
因为平均分配的特性,当左右车轮处在不同附着系数的路面上时(如一侧冰雪、一侧铺装路面),低附着力路面上的车轮能够产生的驱动力矩非常小(轮端摩擦力过小,所以没有办法获得需要的反作用力),而此时对侧附着力良好的车轮也只能得到几乎同样的驱动力矩,而这样的驱动力矩没有办法使良好附着力路面上的车轮滚动前进(这和发动机动力无关,只和此时两侧车轮附着系数的落差有关),因此,即便你猛踩油门,也只能使低附着力的一侧车轮失去附着力空转,而对侧的车轮则因为驱动力矩不足而无法前进。
基于差速器这样的特性,我们便有了“差速锁”,差速锁顾名思义,是差速器的锁止机构,用来锁止轮间差速器(左右半轴间)或者轴间差速器(前后驱动桥间),来应对单个或多个车轮失去附着力无法脱困的情况。
有了差速锁,我们就能在任何一个你冒出“要是没有差速器就好了”的时刻果断的将差速器锁止,“关闭”它的差动功能。
随着技术的发展,从机械控制到现在的电控差速锁(例如气动、电磁等控制方式),使用越来越便利。
这类带有锁止机构的差速器被称之为“强制锁止差速器”。
但是强制锁止差速器只是“防滑差速器”家族当中的一个门派,它并不完美,因为不论它的控制机构怎么进化,终归还是需要人为的锁止和打开。
相比较而言,隶属于“自锁式”差速器阵营中的各类机械和电子式的限(防)滑差速器在灵活性上较“差速
锁”更加优异,它们依靠摩擦片结构、凸轮滑块结构或蜗轮蜗杆结构来达到较高的锁紧系数,甚至还有自锁的功能,可以不需要人为控制,利用自身结构合理分配转矩。
这类差速器通常拥有超过0.5的锁紧系数,一方面能够在正常行驶和转向时起到差速作用,另一方面高锁紧系数意味着,当转向、一侧车轮打滑、或者四驱车上一边驱动桥打滑时,较高的锁紧系数会使得转速低的一侧驱动转矩增大。
比如在全时四驱车上,装备自锁式中央差速器的车型,在转向时后驱动桥就能够得到更多的转矩(因为后桥转向半径小于前桥),呈现倾向于后驱车的驾驶特性。
而我们常常说到的托森差速器(商标权属于日本JTEKT--丰田旗下企业,目前奥迪、丰田等品牌都在使用托森差速器,同时托森不仅作为中央差速器,也有用来做轮间差速器的),依靠蜗轮蜗杆传动的不可逆原理,能够在内部差动转矩较小时起差速作用,而在内部差动转矩较大时,实现自锁,使动力直接传递,不再起差速作用,更好的提升通过性,这正是所谓的“扭力感应式限滑差速器”叫法的由来。
另外,现在越来越主流的电控多片离合器结构的中央差速器通过电-液或电磁控制摩擦片的接合程度,配合传感器判断车辆行驶状态,能够实现主动分配转矩,提升可控性和通过性能,较传统的摩擦片式自锁差速器或粘性耦合器结构更加先进,市面上大多数前横置发动机布局的SUV使用的都是这类四驱系统(供应商主要有GKN、博格华纳、瀚德等)。
电控差速锁通常只出现在全时四驱车(用来锁止中央差速器或驱动桥轮间差速器)或者分时四驱车上(用来锁止轮间差速器),而毫无理由出现在一辆前横置发动机的前驱轿车或前驱城市SUV上,
所谓的“电子差速锁”,不论它有多少种英文缩写(EDL、EDS、XDS等等),它的实质都不会变,它和之前我们提到的各种差速器、差速锁最大的差别就是,“电子差速锁”并没有一个客观存在的实体,用通俗的话说,“电子差速锁真不是东西!”它只是一项
ABS/ESP系统的扩展功能而已。
换言之,即使你把汽车完全拆散,也绝对找不到一套叫做“电子差速锁(EDL、EDS或XDS)”的装置。
那么,这个东西到底有什么用呢?
我们以前驱车转弯时的情况为例:在转弯时,由于惯性作用,车辆重心外移,地面与内侧前轮的摩擦力小于外侧,所以内侧车轮更容易打滑,一旦车轮发生打滑,此时由于差速器的平均分配转矩特性,能够施加的有效转矩便只能达到打滑车轮滑动摩擦力的力矩水平,因此有附着力的外前轮得不到足够的驱动力矩,所以车辆将会出现严重的转向不足(俗称推头),车头外甩无法转向,失去方向控制。
而电子差速锁,会利用轮速传感器的信息及车辆其他传感器信息对车轮的工作状态和车辆行驶状态作出判断,当监测到内侧车轮将发生打滑或已经打滑时,制动系统能
够对内侧前轮的车轮实施制动,这相当于提高了打滑车轮这一侧的附着系数,使传递到轮端的有效扭矩提升,只要这个通过制动带来的“附着系数”比外侧有附着力车轮的附着系数高,差速器就能够传递足够的驱动转矩驱动外侧车轮转动,使车辆保持方向的可控性。
好了,这就是“电子差速锁”,和前面我们提到的各种“锁”以及“限滑”差速器都没有任何关系。
『同样的原理被很多城市SUV用来控制轮间的扭矩分配』
虽然相比真正的限滑差速器和差速锁在性能上仍有差距,但是这仅属于ESP的附加功能,无论在成本上还是结构上都更加简单(完全没有结构嘛...),因此,“电子差速锁”的原理得到了更加广泛的应用----很多城市SUV开始利用“制动”来进行轮间的扭矩分配,帮助车辆提高公路行驶性能和通过能力。