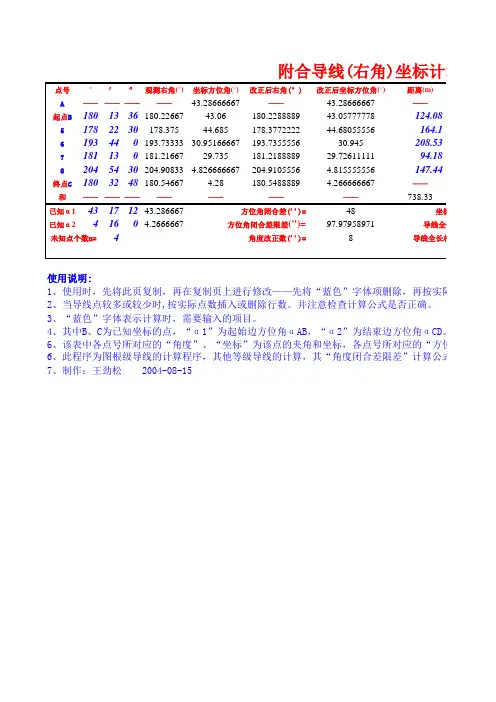
方位角及坐标夹角计算表格
导线附合右角闭合差计算表
除,再按实际数据进行填写。 否正确。
方位角αCD。n为待定的导线点的点数。 对应的“方位角”、“距离”为该点至下一点的方位角及平距 差”计算公式及“导线全长相对闭合差”数值要修改。
4.28
180.5488889
和 —— —— —— ——
——
——
已知α1 43 17 12 43.286667 已知α2 4 16 0 4.2666667 未知点个数n= 4
方位角闭合差('')=
方位角闭合差限差('')=
角度改正数('')=
改正后坐标方位角(°)
43.28666667 43.05777778 44.68055556
30.945 29.72611111 4.815555556 4.266666667
——
48 97.97958971
8
距离(m) ——
124.08 164.1 208.53 94.18 147.44
——
738.33
坐标闭合差fx(m)=
导线全长闭合差(m)=
导线全长相对闭合差K=1/
使用说明: 1、使用时,先将此页复制,再在复制页上进行修改——先将“蓝色”字体项删除,再按实际数据进行填 2、当导线点较多或较少时,按实际点数插入或删除行数。并注意检查计算公式是否正确。 3、“蓝色”字体表示计算时,需要输入的项目。 4、其中B、C为已知坐标的点,“α1”为起始边方位角αAB,“α2”为结束边方位角αCD。n为待定的 6、该表中各点号所对应的“角度”、“坐标”为该点的夹角和坐标,各点号所对应的“方位角”、“距 6、此程序为图根级导线的计算程序,其他等级导线的计算,其“角度闭合差限差”计算公式及“导线全 7、制作:王劲松 2004-08-15
实地测绘中的方位角与坐标计算
实地测绘中的方位角与坐标计算引言:实地测绘作为一门应用广泛的工程学科,在现代技术的支持下正变得越来越精准和高效。
其中,方位角与坐标计算是实地测绘的重要组成部分,它们决定了测绘结果的准确性和可靠性。
本文将从理论到实践,深入探讨实地测绘中方位角与坐标计算的方法和应用。
一、方位角的概念和计算方法方位角是指测量线与正北方向之间的夹角,通常用度数表示。
在实地测绘中,我们常常使用全站仪、经纬仪等仪器来测量方位角。
具体计算方法是通过观测望远镜上的方位圈上的读数,再结合磁偏角、磁倾角等参数进行修正。
通过多次观测和计算,可以得到相对准确的方位角数据。
二、坐标计算的基本原理坐标计算是指根据已知的测量数据,通过特定的计算方法得出目标点的坐标值。
在实地测绘中,常用的坐标计算方法有三角测量法、导线测量法等。
在三角测量法中,通过测量目标点与已知基准点之间的距离和方位角,利用三角形的几何关系计算目标点的坐标值。
在导线测量法中,通过测量每一个线段的长度和方位角,再根据已知起点的坐标,通过累加和计算得出目标点的坐标值。
三、实地测绘中的方位角与坐标计算的应用方位角与坐标计算作为实地测绘的基本工具,广泛应用于土地测量、建筑工程、道路设计等领域。
例如,在土地测量中,方位角与坐标计算可以用于绘制土地界址线图、确定土地纠纷的范围等。
在建筑工程中,方位角与坐标计算可以用于测量建筑物的位置和大小,保证建筑物的合理布局。
在道路设计中,方位角与坐标计算可以用于确定道路的走向和布局,保证道路的安全性和通行性。
四、实地测绘中方位角与坐标计算的挑战与进展实地测绘中的方位角与坐标计算面临着一些挑战,如地形复杂、测量误差、环境干扰等。
为应对这些挑战,近年来,越来越多的新技术被引入到实地测绘中。
比如,全球卫星导航系统(GNSS)可以提供高精度的全球定位信息,激光扫描技术可以获取更准确的地形数据。
这些新技术的应用,不仅提高了方位角与坐标计算的准确性,还提高了测绘工作的效率和可靠性。
道路缓和曲线任意点坐标及方位角的计算方法
求点与 ZH 点的距离, ΑZH - P 表示直线 ZH - P 的坐
标方位角 1
要求得 P 点的坐标, 关键是要正确求得 D ZH - P 和 ΑZH - P 1 依据 (7) 可以求得 D ZH - P 1
对于 ΑZH - P 有 ΑZH - P = ΑZH - r + 360°成立, 其中 ΑZH 为路线走向方向或 ZH 点切线方向的坐标方位
参考文献:
[ 1 ] 何景华 1 公路勘测[M ]1 北京: 人民交通出版社, 19981 [ 2 ] 刘延伯 1 工程测量[M ]1 北京: 冶金工业出版社, 19841
T 2= 20. 13 m
466 824. 034 Η= 11°29′37″
简要计算如下:
中点的里程为 K0+ 313. 755 m , 终点的里程为
K0 + 343. 84 m , 起 点 切 线 的 走 向 方 位 角 ΑZH =
54°14′51″, 对于点 K0+ 313. 755 处, l= 30. 085 m
点 号 起点 (直缓点) 切交点 (JD )
表 1 部分设计数据
Ta b le 1 P a rt de s ign da te
里程桩号 K0+ 283. 67 K0+ 323. 87
xm 3 081 965. 940 3 081 989. 428
ym
切线长和夹角
T 1= 40. 20 m 466 791. 410
A bs tra c t: O n the d ifficu lties in com pu tation and setting of coo rd ination in dem u lcen t cu rre, a new com putation m ethod of the coo rdination of any po in t in dem ulcen t curve of viatical figuration is p ropo sed. B ased on the theo ry of coo rdination com putation, the calculating fo rm ulas is derived. It is useful in the setting of dem ulcen t curve in h igh class h ighw ay’ s adert.
方位角计算公式.
一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13)上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。
象限角和坐标方位角之间的换算公式列于表1-4。
表1-4 象限角与方位角关系表象限象限角与方位角换算公式第一象限(NE)=第二象限(SE)=-第三象限(SW)=+第四象限(NW)=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有=++ (1-14)设三点相关位置如图1-17()所示,应有=++-=+- (1-15)若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16)显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17)上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
通过方位角、距离和一点坐标,求另一点坐标的计算步骤
通过方位角、距离和一点坐标,求另一点坐标的计算步骤通过方位角、距离和一点坐标求另一点坐标的计算步骤是一种常见的地理测量方法,被广泛运用于航海、测量和导航等领域。
这种方法基于三角学原理,使用三角函数和向量计算来确定目标点的坐标位置。
下面将详细介绍这种计算步骤。
首先,我们需要明确一些基本概念。
方位角是指从一个点到另一个点之间的连线与正北方向之间的夹角。
方位角通常以度数表示,正北方向为0度,顺时针方向逐渐增大。
距离是指两个点之间的直线距离。
每个点可以用平面坐标系中的(x, y)表示。
在开始计算之前,需要确定一个参考点和一个参考方向。
参考点通常是已知坐标的点,可以是地图上的标志物或测量仪器的定位点。
参考方向通常是地图或测量仪器上的标尺指向的方向。
为了方便计算,参考点的x坐标和y 坐标可以设置为0,这样计算结果将得到目标点相对于参考点的偏移量。
计算步骤如下:1. 确定参考点和参考方向,并将其坐标设置为(0,0)。
假设参考方向为正北。
2. 确定目标点与参考点之间的方位角和距离。
方位角可以用角度度量,距离可以用任意单位表示。
3. 将方位角转换为弧度。
弧度是角度的一种计量方式,用于三角函数计算。
弧度 = 角度 x π / 180 式中,π是一个常数,约等于3.14159。
4. 使用三角函数计算目标点相对于参考点的偏移量。
目标点的偏移量x = 距离 x sin(弧度) 目标点的偏移量y = 距离 x cos(弧度) 这里使用sin和cos函数分别计算y轴和x轴上的偏移量。
5. 目标点的坐标 = 参考点的坐标 + 偏移量目标点的x坐标 = 参考点的x坐标+ 目标点的偏移量x 目标点的y坐标 = 参考点的y坐标 + 目标点的偏移量y 6. 计算得到的坐标即为目标点的坐标。
需要注意的是,方位角一般是以正北为基准,但在实际应用中也可以选择其他基准方向,如正东、正南或正西。
根据实际需要,可以通过旋转坐标系或调整计算方式来适应不同的方位角基准。
三种方位角之间的关系
【方位角(azimuthangle)】从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,叫方位角。
(一)方位角的种类由于每点都有真北、磁北和坐标纵线北三种不同的指北方向线,因此,从某点到某一目标,就有三种不同方位角。
(1)真方位角。
某点指向北极的方向线叫真北方向线,而经线,也叫真子午线。
由真子午线方向的北端起,顺时针量到直线间的夹角,称为该直线的真方位角,一般用A表示。
通常在精密测量中使用。
(2)磁方位角。
地球是一个大磁体,地球的磁极位置是不断变化的,某点指向磁北极的方向线叫磁北方向线,也叫磁子午线。
在地形图南、北图廓上的磁南、磁北两点间的直线,为该图的磁子午线。
由磁子午线方向的北端起,顺时针量至直线间的夹角,称为该直线的磁方位角,用A m表示。
(3)坐标方位角。
由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用α表示。
方位角在测绘、地质与地球物理勘探、航空、航海、炮兵射击及部队行进时等,都广泛使用。
不同的方位角可以相互换算。
军事应用:为了计算方便精确,方位角的单位不用度,用密位作单位。
换算作:360度=6000密位。
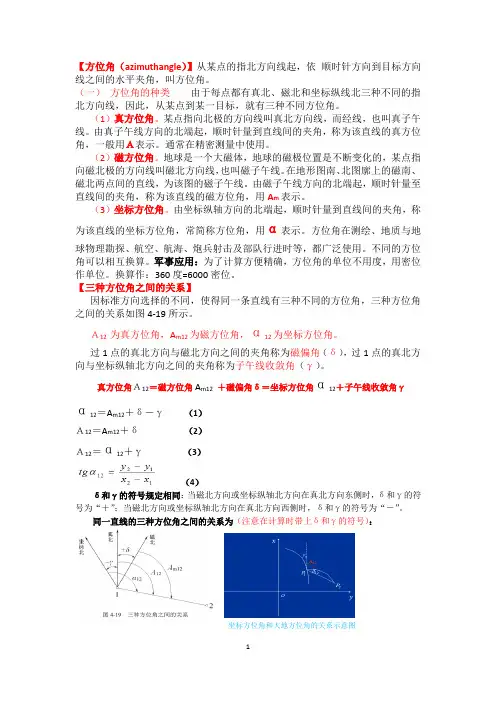
【三种方位角之间的关系】因标准方向选择的不同,使得同一条直线有三种不同的方位角,三种方位角之间的关系如图4-19所示。
A12 为真方位角,A m12为磁方位角,α12为坐标方位角。
过1点的真北方向与磁北方向之间的夹角称为磁偏角(δ),过1点的真北方向与坐标纵轴北方向之间的夹角称为子午线收敛角(γ)。
真方位角A12=磁方位角A m12+磁偏角δ=坐标方位角α12+子午线收敛角γα12=A m12+δ-γ(1)A12=A m12+δ(2)A12=α12+γ(3)(4)δ和γ的符号规定相同:当磁北方向或坐标纵轴北方向在真北方向东侧时,δ和γ的符号为“+”;当磁北方向或坐标纵轴北方向在真北方向西侧时,δ和γ的符号为“-”。
同一直线的三种方位角之间的关系为(注意在计算时带上δ和γ的符号):坐标方位角和大地方位角的关系示意图上式中:γ为平面子午线收敛角,当站点在中央子午线西侧时γ为负,在东侧时为正;δ为Gauss投影的方向改化[1]。
方位角计算公式
辅助 计算
点名 2 BM1 1
2
3
BM2
测站数 3 8 3 4 5
20
表 2-2 附合水准路线计算
观测高差 /m
改正数 /m
改正后高差 /m
4
5
6
+8.364
- 0.014
+8.350
- 1.433
- 0.005
- 1.438
- 2.745
- 0.007
- 2.752
+4.661
- 0.008
+4.653
+ 8.847
- 0.034
一、直线定向
1、正、反方位角换算
对直线
而言,过始点
的坐标纵轴平行线指北端顺时针至直线的夹角
是
的正方位角,而过端点
的坐标纵轴平行线指北端顺时针至直线的夹角
则是
的反方位角,同
一条直线的正、反方位角相差
,即同一直线的正反方位角
=
(1-13>
上式右
端,若
<
,用“+”号,若
,用“-”号。
2、象限角与方位角的换算
算
各
待
定
点
的
高
程
。
如上 所述,闭 合水准 路线的 计算方法除高差 闭合差 的计算有 所区别 而外,其余与附 合路线 的计算 完全相 同。
二
、
举
例
1.
附
合
水
准
路
线
算
例
5 / 26
下图 2-18 所示附合水准路线为例,已知水准点 A 、 B 和待定点 1、2、3 将整个路线分为四个测段。
测段号 1 1 2 3
坐标正算反算公式讲解
一 方位角:在高斯直角坐标系中,由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用a 表示。
1、第一象限的方位角YX第一象限第二象限第三象限第四象限oAa图12、第二象限的方位角Y X第一象限第二象限第三象限第四象限oAa图23、第三象限的方位角YX第一象限第二象限第三象限第四象限o Aa图34、第四象限的方位角YX第一象限第二象限第三象限第四象限oAa图4方位角计算公式:x=a -1tanA Y O Y -AX OX-方位角的计算器计算程序:Pol(X A -X O ,Y A -Y O )直线OA 方位角度值赋予给计算器的字母J ,0≤J <360。
直线段OA 的距离值赋予给计算器的字母I,I >0 直线OA 与直线AO 的方位角关系: 1、当直线OA 的方位角≤180°时,其反方位角等于a+180°。
2、 当直线OA 的方位角>180°时,其反方位角等于a-180°。
二 方位角的推算 (一)几个基本公式 1、坐标方位角的推算或:注意:若计算出的方位角>360°,则减去360°;若为负值,则加上360°。
例题:方位角的推算已知:α12=30°,各观测角β如图,求各边坐标方位角α23、α34、α45、α51。
13图5解: α23= α12-β2+180°=30°-130°+180°=80°α34= α23-β3+180°=80°-65°+180°=195°α45=α34-β4+180°=195°-128°+180°=247°α51=α45-β5+180°=247°-122°+180°=305°α12=α51-β1+180°=305°-95°+180°=30°(检查)三坐标正算一、直线段的坐标计算oB DACEaap图6设起点O的坐标(X O,Y O),直线OP的方位角为F op,求A、C、E点的坐标1、设直线段OA长度为L,则A点坐标为X A=X O+L×Cos(F op)Y A=Y O+L×Sin(F op)2、设直线段OB长度为L OB,直线段BC长度为L BC,则C点坐标为X B=X O+L OB×Cos(F op)Y B=Y O+L OB×Sin(F op)直线BC的方位角F BC=F op+aIF F B C>360°:Then F BC-360°→F BC:IfEndX C=X B+L BC×Cos(F BC)Y C=Y B+L BC×Sin(F BC)3、设直线段OD长度为L,直线段DE长度为L DE,则E点坐标为ODX D=X O+L OD×Cos(F op)Y D=Y O+L OD×Sin(F op)直线DE的方位角F DE=F op-aIF F DE<0°:Then F DE+360°→F DE:IfEndX E=X D+L DE×Cos(F DE)Y E=Y D+L DE×Sin(F DE)二、缓和曲线段的坐标计算x Y 00=L- +=L 40R L 52s 2L3456R L 94s 4L 6R L 3s L 336R L 7s 33-90 L πRL sO2切线角=设完整缓和曲线起点O 的坐标为O (XO,YO ),方位角为F ,曲线长度为L S ,曲线上任一点的曲线长度为L,当线路右转时直线CP 的方位角Fcp=F+90°IF F cp >360°:Then F cp-360°→F cp :IfEnd当线路左转时直线CP 的方位角Fcp=F-90°IF F cp<0°:Then F cp+360°→F cp:IfEndX P=X O+Abs(x O)×Cos(F)+Abs(y O)×COS(F CP)Y P=Y O+Abs(x O)×Sin(F)+Abs(y O)×Sin(F CP)三、圆曲线段的坐标计算圆曲线的已知点数据为起点S的桩号K s、走向方位角αs、起点S 坐标为(X o,Y o)、圆曲线半径为R与曲线长为L。
方位角计算公式
一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13> 上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东<NE)、南东<SE)、南西(SW>、北西(NW>。
象限角和坐标方位角之间的换算公式列于表1-4。
象限角与方位角换算公式==-=+=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线<图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17(>所示,应有=++ (1-14>设三点相关位置如图1-17(>所示,应有=++-=+- (1-15>若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16>显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17>上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
方位角的计算方法
方位角的计算方法方位角是指在平面直角坐标系中,特定点与正方向x轴之间逆时针方向的夹角。
它在数学、地理、航空航天等领域中都有广泛的应用。
计算方位角的方法主要有以下几种:1.基于直角坐标系的计算:假设有两个点A(x1, y1)和B(x2, y2),首先需要计算出两点之间的直线斜率k = (y2 - y1) / (x2 - x1)。
然后利用反正切函数,通过求解arctan(k)得到弧度值θ。
最后利用单位换算,将弧度值θ转化为角度值α=θ * 180 / π,即为所求的方位角。
2.基于极坐标系的计算:在极坐标系中,一个点可以通过距离r和极角θ来表示。
假设有两个点A(r1,θ1)和B(r2,θ2),要计算两点之间的方位角,首先需要将两点的极角θ转化为弧度制,然后通过计算Δθ=θ2-θ1得到两点之间的相对角度。
最后利用单位换算,将相对角度Δθ转化为角度值α=Δθ*180/π,即得到方位角。
3.基于方向向量的计算:假设有两个点A(x1, y1)和B(x2, y2),可以将两点之间的连线看作一个方向向量。
首先需要计算出两点之间的方向向量V(x2 - x1, y2 - y1)。
然后利用反正切函数,通过求解arctan(Vy / Vx)得到弧度值θ。
最后利用单位换算,将弧度值θ转化为角度值α=θ * 180 / π,即为所求的方位角。
需要注意的是,在计算方位角时,可能会遇到特殊情况,例如:-当两点在同一直线上时,方位角为0或180度;-当两点重合时,方位角没有定义。
总结起来,方位角的计算方法有基于直角坐标系、极坐标系和方向向量三种方法,根据具体情况选择适合的方法进行计算。