汽车自适应巡航系统的多模式切换控制
元plus自适应巡航使用教程

元plus自适应巡航使用教程定速巡航系统(CRUISE CONTROL SYSTEM)缩写为CCS,又称为定速巡航行驶装置,速度控制系统,自动驾驶系统等。
定速巡航控制区域一般在方向盘后方或者集成在多功能方向盘上。
一、定速巡航系统的基本功能和优点一般设置了五种功能:SET(设置恒速)、COAST(减速或滑行)、RES(恢复)、ACC(加速)、CANCEL(解除或取消)。
当按下车速调置开关(SET)后,就能存储此时此刻的车速并能自动保持这个车速。
当不需要速度控制时,只要踩下制动踏板,速度设定功能就会立即停止,但是速度信息继续存在。
若想恢复速度控制,按恢复开关(Resume)就能恢复原来存储的车速,汽车又能按照这个速度行驶。
同时该系统有低速自动消除功能,当车速低于40公里每小时以下(有的车是低于30公里每小时),定速设置会自动消失并不能再恢复。
定速巡航系统是利用电控技术对汽车的行驶速度进行自动调节的一种电子控制装置,是一种减轻驾车者疲劳的装置。
具有保持汽车行驶速度稳定、提高汽车行驶的舒适性、可提高燃油经济性和环保性的优点。
二、定速巡航系统的使用条件:在下列的情况下是不适合使用定速巡航系统的。
1、原则上定速巡航要在高速公路或全封闭路上使用。
因为在非封闭路上,复杂的路况不利于交通安全。
例如在很多小路口又往往有车辆冲上路面,在定速巡航的情况下,容易措手不及,造成交通事故2、雨天禁用,雪冰天禁用。
3、盘山路或弯路过多,要禁用。
因为我们在正常出弯路的情况下,要适当加油提供更大的转向力。
定速巡航状态下车辆自动维持车速恒定,油门由行车电脑控制,往往给弯路行车带来危险。
如果在这种条件下,应当适当控制车速。
4、道路上车辆太多,也不适合定速巡航。
一种全速型自适应巡航系统状态的转换机制

一种全速型自适应巡航系统状态的转换机制张宏;冯兴龙【摘要】自适应巡航控制系统(ACC:Adaptive Cruise Control System)属主动安全技术,是在传统巡航控制基础上,根据本车与前车或障碍物之间的相对距离,自动施加驱动或制动控制来保持合适的安全间距;全速型ACC系统走停功能是在基础型自适应巡航控制的基础上,通过控制汽车的制动和驱动,实现汽车的起步和停车的自动控制.文章提出一种全速型ACC系统的控制逻辑方案,试验结果表明,所设计的方案可明显改善ACC系统的性能,同时提升驾驶安全性和舒适性.【期刊名称】《汽车实用技术》【年(卷),期】2016(000)005【总页数】4页(P130-133)【关键词】全速型ACC;控制逻辑;启停功能【作者】张宏;冯兴龙【作者单位】华晨汽车工程研究院,辽宁沈阳 110141;华晨汽车工程研究院,辽宁沈阳 110141【正文语种】中文【中图分类】U463.6110.16638/ki.1671-7988.2016.05.033CLC NO.: U463.61 Document Code: B Article ID: 1671-7988 (2016)05-130-04描述:ACC(自适应巡航)状态机是ACC系统的核心,与整车其它控制系统密切关联。
状态机检测其它系统的工作状态,并根据驾驶员的操作完成初始化、关闭、未激活、激活和故障模式的切换,最终将计算结果发送到各执行单元,实现对车辆加减速控制。
ACC主状态由初始化、关闭、激活、未激活、故障五个模式组成,之间的关系如图1所示:1.1 初始化模式(Initializaton Mode)初始化模式为ACC功能运行前期自身检测是否满足功能正常激活条件。
初始化时间不能超过一定时间(如200ms),初始化过程中系统信号发送默认值,初始化完成后系统信号发送默认值。
进入条件:点火开关调至ON档,ACC雷达上电。
退出条件:(1)初始化完成后,未检测到系统故障,进入关闭模式。
智慧巡航的操作方法有哪些

智慧巡航的操作方法有哪些智慧巡航(Adaptive Cruise Control,简称ACC)是一种先进的车辆驾驶辅助系统,可以帮助驾驶员在高速公路上保持一定的车距,并根据前车的速度自适应调整自己的车速。
智慧巡航的操作方法如下:1.启动智慧巡航系统:车辆上的控制面板或多媒体屏幕上通常有一个ACC按钮,按下该按钮就可以启动智慧巡航系统。
有些车辆还可以通过语音指令或方向盘上的控制按钮来启动系统。
2.设置巡航速度:启动智慧巡航系统后,车辆会自动继续前行,驾驶员需要通过控制面板或多媒体屏幕上的设置按钮来设置巡航速度。
通常可以通过旋钮或按键逐步增加或减少速度,设置需要的巡航速度。
3.设置跟车间距:智慧巡航系统可以根据前车的速度和距离自动调节车辆的速度。
驾驶员可以通过控制面板或多媒体屏幕上的设置按钮来调整车辆与前车之间的跟车间距。
通常有多个选项可供选择,例如小距离、中距离和大距离。
4.启动跟车功能:设置完巡航速度和跟车间距后,驾驶员需要按下控制面板或方向盘上的启动按钮来启动智慧巡航的跟车功能。
启动后,车辆会自动根据前车的行驶速度和车距来调节自己的车速,与前车保持安全的距离。
5.手动控制:驾驶员在智慧巡航期间可以随时通过踩踏刹车、加速或转向来重新获得车辆的手动控制权。
当驾驶员踩踏刹车或加速时,系统会自动取消智慧巡航功能,并将车速控制权交还给驾驶员。
6.超车模式:有些智慧巡航系统还配备了超车模式,可以帮助驾驶员更轻松地完成超车动作。
在超车时,驾驶员可以通过切换超车模式来暂时提高车速,完成超车后再切换回智慧巡航模式。
7.停车功能:部分智慧巡航系统还配备了停车功能,可以帮助驾驶员在低速行驶或停车时更安全地驾驶车辆。
驾驶员可以通过控制面板或方向盘上的停车按钮来启动停车功能,系统会根据车辆周围的障碍物自动调节车速,并辅助进行停车操作。
需要注意的是,智慧巡航虽然是一种高级驾驶辅助系统,但仍然需要驾驶员保持警觉并时刻准备接管车辆的控制权。
基于变车头时距的汽车自适应巡航系统设计
基于变车头时距的汽车自适应巡航系统设计
冯莉;杨薪敬;曾辉
【期刊名称】《电子设计工程》
【年(卷),期】2024(32)5
【摘要】距离模型和控制算法是汽车自适应巡航系统(Adaptive Cruise Control,ACC)设计的关键。
采用分层式控制方法设计ACC系统控制策略。
设计上层控制器,基于多行车因素影响设计变车头时距模型,利用状态机搭建模式切换策略,同时设计一种车距-速度串联式PID控制策略求取期望加速度;依靠下层控制器,计
算节气门开度/制动压力并输入到CarSim中控制执行器,从而使整个系统实现闭环控制。
通过CarSim/Simulink建立联合仿真模型,在多种工况下对模型进行验证。
仿真结果表明,改进的变车头时距模型与其他模型相比具有一定优势,所设计ACC
系统在多种工况下能够实现稳定的定速巡航和前车跟随功能,保证汽车行驶安全性。
【总页数】6页(P19-24)
【作者】冯莉;杨薪敬;曾辉
【作者单位】重庆交通大学交通运输学院
【正文语种】中文
【中图分类】TN98
【相关文献】
1.基于车联网V2V的汽车自适应巡航控制系统设计
2.汽车自适应巡航系统车距控制策略研究
3.基于模糊控制的汽车自适应巡航系统设计
4.基于毫米波雷达的纯电动汽车自适应巡航系统设计
5.基于预测恒定车头时距策略的自适应巡航控制研究
因版权原因,仅展示原文概要,查看原文内容请购买。
hrv全速自适应巡航使用方法

hrv全速自适应巡航使用方法
全速自适应巡航功能的开关按键一般会配备在方向盘的左侧,开关按键为“acc”按键。
按动全速自适应巡航的开关按键后,车辆将会进入全速自适
应巡航模式,此时可以解放驾驶员的双脚,免去踩踏车辆油门踏板的操作。
进入全速自适应巡航模式后,按动方向盘上的“res”按键,以及“set”按键,可以控制车辆全速自适应巡航模式下车辆的行驶速度。
再次按动“acc”按键,即可解除车辆全速自适应巡航模式。
1. 当车辆的行驶速度在30km/h-80km/h之间时,按动车速控制按键,车
辆的速度会提高或降低5km/h。
2. 当车辆的行驶速度在80km/h-150km/h之间时,按动车速控制按键,车辆的速度会提高或降低10km/h。
以上是关于HRV全速自适应巡航的使用方法,如需了解更多信息,建议咨
询专业技术人员。
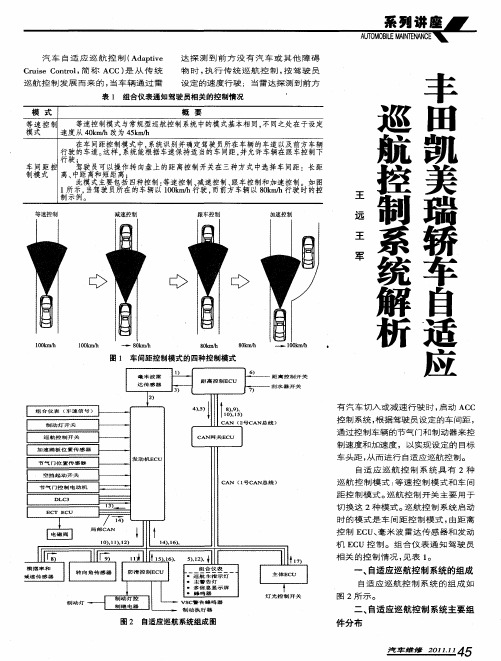
丰田凯美瑞轿车自适应巡航控制系统解析
3减 速 控 制 .
按 照 与 常 规 型 巡 航 控 制 系 统 中 相 同 的 方 法 实 施 等 速 控
距 离 控 制 EC 根 据 来 自毫 米 波 U 雷 达 传 感 器 的 信 号 计 算 目标 减 速 率 , 并 将 减 速 请 求 信 号 传 送 给 发 动 机
故障说明
节气门控制电动机
自己的车辆
图 5 车 间距控制模式 中的等速控制
总线 )
节气门控制电动机
如果 出现 以下任 一情况 。发 动机 E U 将 清 除 设定 车速 并 取 消巡 航 控 C 制: () 1 车速信号故障。 ()T S — i 2E C 中的故障。 ’ A和 B () 3 制动灯开关开路或短路。巡航 ) C E K C U S Y T M” 1 “ H C R IE S S E 控制被 禁止 , 直至故 障被 清除 . 或通 过 检 查巡航 系统) ( 。 巡航控 制开关上 的 O O F按钮 关闭 ) N— F 2 点亮 。 并再次起 动巡航控制 系统后。 3 鸣响 一次。 ) 车速 下 降到低于低 速极 限 ( 约 ) 大 4 闪烁。 4 kd )发动机 E U将取消巡航控制 , 0oa, C 同时将车辆设定速度保存在记忆 中。 如 果 车速 下 降 到 比设 定 车 速 低 A 1k / 6mh或更 多 . 动机 E U将取 消巡 发 C 航控制 。 如果 出 以 现 下任何一种情况, 发动机 、C E KC US Y T M’ 1“H C R I S SE ’ E E U将清除设定车速并取消巡航控制: ( C 检查巡航 系统) 。 () 1 毫米波雷达传感器 的故障。 2 点亮。 ) () 2 毫米波雷达传感器 的轴位移。 3鸣响一次。 ) () 3动态雷达巡航控制系统中的故障。 ) 4 闪烁。 如果 出现 以下任何一种情况, 发动 机 E U将 取消巡航控制 ,同时设定速 ) C E N R D E S R C 1 “ L A A AR S N O ” 度保存在记忆 中: ( 洁雷达传感器) 清 。 () 1 毫米波雷达传感器有脏污。 2 点亮。 ) () 2 巡航控制 被禁 止 , 直至 故障被 3 鸣响一次。 ) B 清 除 .或巡 航控 制开 关上 的 O — F 4 闪烁。 NOF ) 按钮被开启后。 如果 出现 以下任何 一种情况 . 发动 机 E U将 取消巡航控制 ,同时将设定 C 速度保存在记忆 中: () 1刮水器在 H 速度 下运 行( ) R I O A AL B E I 包括 1‘ US N T V IA L ” ' C E
新天籁自适应巡航操作方法

新天籁自适应巡航操作方法
新天籁的自适应巡航操作方法如下:
1. 开车进入高速公路或者宽敞的道路,确保车辆行驶环境安全。
2. 通过仪表盘上的开关将自适应巡航控制系统打开。
一般情况下,开关位于方向盘附近。
3. 调整车速,使其与前车保持适当的距离。
你可以通过仪表盘上的按钮或者方向盘上的控制按钮进行调整。
4. 选择期望的巡航速度。
在仪表盘上的按钮或者方向盘上的控制按钮可以设置巡航速度。
5. 一旦巡航功能开启,车辆将会在车道内保持稳定的速度和距离。
当车辆前方有其他车辆减速或者停车时,车辆将会自动减速并保持安全距离。
6. 如果需要超车或者跟随其他车辆变道,你需要通过转向灯来指示你的意图。
车辆将会根据你的指示来调整速度和车道。
7. 当你想要关闭自适应巡航时,可以通过仪表盘上的按钮或者方向盘上的控制按钮来关闭系统。
需要注意的是,自适应巡航控制系统可以辅助驾驶,但并不能完全替代驾驶员的操作。
在使用自适应巡航系统时,驾驶员仍然需要保持警惕并随时掌握车辆的控制权。
定速巡航的使用方法
定速巡航的使用方法定速巡航是现代汽车上的一项智能驾驶辅助功能,通过此功能驾驶者可以将车辆保持在一个指定的速度上行驶,而无需持续踩油门。
下面将详细介绍定速巡航的使用方法。
使用定速巡航前,首先要确保车辆在安全的道路上行驶,无障碍物和异常情况。
同时,也需要知道定速巡航只能在高速公路或其他限制速度的道路上使用,且在使用前需要联系当地交通法规,确保在法律允许的范围内使用。
一、打开定速巡航开关定速巡航开关通常位于驾驶座右侧的方向盘上,以"Cruise"或"Cruise Control"标识。
首先,我们可以将车辆加速至期望的巡航速度,然后在达到所需速度后,按下方向盘上的加速/减速按钮或拨动开关,激活定速巡航功能。
二、设定巡航速度激活定速巡航后,系统将会继续保持车辆当前的速度,并且该速度将成为巡航速度的初始设定值。
为了调整巡航速度,可以通过方向盘上的加速/减速按钮进行微调,以使速度逐渐升高或降低。
需要注意的是,在调整速度时,也应该遵循交通规则和道路的限速。
三、切换和暂停巡航在巡航的过程中,如果需要暂时解除巡航状态,可以通过踩下刹车踏板或方向盘上的"Cancel"或"Resume"按钮来暂停巡航。
稍后,只需松开刹车踏板或再次按下"Resume"按钮,巡航将恢复到之前设定的速度。
四、设置和使用巡航距离有些现代汽车上的定速巡航系统还配备了"巡航距离"功能,它可以根据前方车辆的距离来自动调整巡航车辆的速度。
该功能通常有几个选项可供选择,例如近距离、中等距离和远距离。
通过切换按钮或旋钮设置所需的距离,并根据实际情况做出选择。
五、注意事项1. 定速巡航只是一种驾驶辅助功能,驾驶人员仍然需要保持警惕,并随时准备接管车辆的控制权。
因此,长时间使用定速巡航时,不要转移对路况的注意力。
2. 避免在恶劣的天气条件下或交通繁忙的情况下使用定速巡航功能,以确保及时做出反应。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车自适应巡航系统的多模式切换控制
作者:裴晓飞, 刘昭度, 马国成, 齐志权, PEI Xiaofei, LIU Zhaodu, MA Guocheng, QI Zhiquan
作者单位:北京理工大学机械与车辆学院 北京 100081
刊名:
机械工程学报
英文刊名:JOURNAL OF MECHANICAL ENGINEERING
年,卷(期):2012,48(10)
被引用次数:1次
1.张磊基于驾驶员特性自学习方法的车辆纵向驾驶辅助系统 2009
2.LI Shengbo;LI Keqiang;WANG Jianqiang Model predictive multi-objective vehicular adaptive cruise control 2011(03)
3.FREYER J;DEML B;MAURER M ACC with enhanced situation awareness to reduce behavior adaption in lane change situations 2007
4.侯德藻汽车纵向主动避撞系统的研究[学位论文] 2004
5.CANALE M;MALAN S;MURDOCCO V Personalization of ACC stop and go task based on human driver behavior analysis 2002
6.FANCHER P;BAREKET Z;PENG HUEI Methodology for assessing adaptive cruise control behavior
2003(03)
7.张德兆;王建强;刘佳熙加速度连续型自适应巡航控制模式切换策略 2010(08)
8.装晓飞;刘昭度;马国成一种汽车巡航控制的分层控制方法 2012(03)
9.MOON S;YI K;KANG H Adaptive cruise control system with collision avoidance in multi-vehicle
traffic situations SAE 2009-01-0439 2009
10.YAMAMURA Y;TABE M;KANEHIRA M Development of an adaptive cruise control system with stop and go capability SAE,2001-01-0798 2001
11.FANCHER P;BAREKET Z;ERVIN R Human-centered design of an ACC-with-braking and forward-crashwarning system[外文期刊] 2001(2-3)
12.MOON S;YI K HUman driving data-based design of a vehicle adaptive cruise control algorithm[外文期刊] 2008(08)
13.YI K;CHUNG J Nonlinear brake control for vehicle CW/CA system 2001(01)
14.PERSSON M;BOLTING F;HESSLOW E Stop & go controller for adaptive cruise control 1999
1.WANG Pangwei.WANG Yunpeng.YU Guizhen.TANG Tieqiao An Improved Cooperative Adaptive Cruise Control (CACC) Algorithm Considering Invalid Communication[期刊论文]-中国机械工程学报 2014(3)
引用本文格式:裴晓飞.刘昭度.马国成.齐志权.PEI Xiaofei.LIU Zhaodu.MA Guocheng.QI Zhiquan汽车自适应巡航系统的多模式切换控制[期刊论文]-机械工程学报 2012(10)。