KUKA机器人零点校正
KUKA-C4系统安装及零点试校

设置为ቤተ መጻሕፍቲ ባይዱ项目
删除其他选项
10.设置时间
投入运行,售后服 务,HMI最小化
进入控制面板 选择时间设置
进入时间设置
将时间更改为 现实时间
11.重新冷启动
退回主菜单后,选择关机,进入菜单后选择休眠,把 强制冷启动与重新读入文件选项打钩,之后选择重新 地洞控制系统
12.零点试校
点击检测校正零 点,之后将原有 数据删除
7.机器人型号配置
选择D:\KRC\INTERNAT\MADA\KRC4\KR****\FLOOR
之后选择复制
8.安全设置
进入安全配置,随意选择一个 选项进入,之后点击现在激活
9.更改项目号
先点击相应图标,之后点击保存当前设置,进入更改菜单, 将内容改为项目号,图上所示为ERST-IBN
激活ERST-IBN
机器人系统安装及零点试校
所需工具
系统U盘
专家系统U盘
BIOS升级U盘
EMD
机器人控制柜连线
电源线
机器人电缆
编码器线
KCP线
机器人连线
电源线
编码器线
1.升级主板BIOS
插入BIOS U盘,开机,观察U 盘指示灯,先闪,后常亮,之后 快闪,最后灯不亮,把U盘拔出, 这时更新完成。关机。
2 .安装系统
插入有系统镜像 文件的U盘,开机, 观察控制柜上的6 个指示灯,6个灯 全亮时,说明镜像 完成,这时可以拔 出U盘,等待系统 进入操作界面。
镜像做好之后,系统会自动进入操作界面, 这时会有两个德语的选项,选择左边这个 (CLONNING),等待大概一分钟,关机。 (注意:操作界面一定要等到有S,O,R出现再 做CLONNING)
KUKA机器人6轴零位校准方法(EMT)

KUKA机器人6轴零位校准方法(EMT)Lyq 20150108 一.手动状态T1,在轴坐标系,将机器人1到6轴分别移动到其原始零点附近,目测每个轴上的两个零位观察缺口要对准。
二.将EMT安装在轴1的校零槽位内,将另一端连接到机器人底座上的X32插口三.操作KUKA控制手柄,依次选择如下菜单进入零位校准模式1. 配置,用户组2. 选专家,密码kuka3. 选择准备运行,零点校正,电子测量器4. 标准,检查零点校正5. 选择机器人轴1,将下方报警栏信息清空,左手按住手柄背面的驱动按键,等驱动图标“I”变成绿色,按”检查“按钮对应的软键,报警栏会出现准备就绪字样。
此时轴1已经开始微动,可以观察到EMT上的两个绿色指示灯会由两个全亮变为只有1个亮,伴随着咔嗒一声,校准结束。
这时如果校准后零位与现零位偏差很小,报警栏直接会显示”轴1零位校准结束“,如果校准后零位与现零位偏差超限,则会在右侧信息栏显示校准前后的数据差别,包括编码器码值差和角度差,需要选择”存储”后才能完成零位校准。
6. 将EMT移动到轴2的校零槽位内,另一端依然连接到机器人底座上的X32插口;在右侧信息栏选择机器人轴2,按照上述步骤对轴2进行零位校准7. 依次对余下的4个轴进行零位校准四.都较准完毕后,手动模式慢速运行“维修”程序,将机器人打到维修位,观察行程和位置是否正常,若正常,之后再运行主程序,手动慢速回HOME点,观察行程和位置是否正常,若正常,则进行过料测试。
五.因本次进行零位校准的是KR150割带机器人,那么在解包系统电控柜操作屏上选择“启用KR150机器人”,在机器人KCP上选择main程序,自动,启动,等待自动对烟包割带,看是否正常。
若一切正常,则本次零位校准结束。
小库卡A4轴零点校正

小库卡A4轴零点校正
零点标定时,会给每个机器人轴分派一个基准值。
就好比用一杆秤去称东西,我们需要先把秤调到零位值,才能称的更准确。
这样机器人控制系统可识别到轴位于何处。
机器人轴在哪一个角度(比如30°),那么它参考点是零点位置。
)仅在工业机器人得到充分和正确标定零点时,它的使用效果才会最好。
只有这样机器人才能达到它最高的点精度和轨迹精度。
可以执行程序。
只有进行零点标定后才能运行程序。
1.标准方法
2.零点标定,带负载校正
标准方法:通常在以下几种场合使用:
1.机器人初次出厂没有装任何工具
2.机器人只装一个工具且不会拆卸换成其他工具,机器人的定位精度相对较低
2)零点标定,带负载校正方法:通常在以下几种场合使用
1.机器人安装多个工具且会来回切换(比如机器人装有多个点焊钳)
2.机器人定位精度较高时。
KUKA机器人零点校正位置
标定被取消... ...操作员手动取消
使用EMT标定
Set-up
使用EMT标定
设定零点
初次标定
保存偏移量
检查零点
带负载的补 偿式标定
带负载的不 补偿式标定1>
1> 仅仅当初次标定的值仍然有效才可使用 < e.g. 更换马达或者部件, 或者碰撞之后, etc.>
Mastering loss / check
01/2006
8
mo2_mastering_en.ppt © Copyright by KUKA Roboter GmbH College
1 23
标定菜单
标定
千分表
EMT
标准
存储当前数据 带负载.
设定零点
检查零点
初次标定 保存偏移量 带负载标定
01/2006
9
mo2_mastering_en.ppt © Copyright by KUKA Roboter GmbH College
01/2006
1
mo2_mastering_en.ppt © Copyright by KUKA Roboter GmbH College
标定工具
• 为了让机器人能够精确到达机 械零点, 我们需要使用千分尺或
者 电子测量器 <EMT>.
电子测量器 <EMT>
用 EMT 零位校正, 机器人各轴 会自动移动至机械零位. 如用千 分表, 必须在轴坐标系运动模式 下手动移动各轴至机械零位
标定单元 参考槽口
标定示意图
运动方向
+
-
EMT 或者 千分尺
目视标记
预标定位
01/2006
库卡机器人的零点标定方法及步骤

库卡机器人的零点标定方法及步骤【知识专栏】库卡机器人的零点标定方法及步骤在工业自动化领域中,库卡机器人被广泛应用于各种生产线上,其高效、精准和灵活的特性受到了众多企业的青睐。
而在库卡机器人的使用过程中,零点标定是一个非常重要的环节,它直接影响着机器人的定位精度和工作效率。
本文将针对库卡机器人的零点标定方法及步骤进行深入探讨,并提供相应的个人观点和理解。
一、库卡机器人的零点标定概述零点标定是指确定机器人工作空间坐标系原点的过程,通过对机器人各关节进行坐标轴的校准,使得机器人能够准确地定位和执行任务。
对于库卡机器人来说,零点标定是其正常运行的基础,其准确性和可靠性对机器人的工作效率和精度至关重要。
二、库卡机器人的零点标定方法1. 机械标定:通过对机器人的机械结构进行校准,确定各关节的零点位置。
2. 软件标定:利用库卡机器人的控制软件进行坐标系的校准和调整。
3. 视觉标定:通过视觉系统对机器人进行实时监测和校准,实现精准的零点标定。
三、库卡机器人的零点标定步骤1. 准备工作:确认机器人处于停止状态,确保工作环境安全、整洁。
2. 机械标定:通过操纵机器人手动调整各关节,使其处于预设的零点位置,完成机械标定。
3. 软件标定:在控制软件中进入零点标定界面,按照提示进行坐标系校准和调整。
4. 视觉标定:如需使用视觉系统进行标定,则在此步骤进行相应操作,确保视觉系统的准确性和稳定性。
5. 检测验证:完成标定后,进行相关的检测验证工作,确保零点标定的准确性和可靠性。
四、个人观点和理解库卡机器人的零点标定是其正常运行的基础环节,对于保障机器人的定位精度和工作效率具有重要意义。
在实际操作中,应结合机器人的具体情况和工作需求,选择合适的零点标定方法及步骤,并严格按照操作规程进行操作,以确保标定的准确性和可靠性。
定期对机器人进行定位精度的检测和验证工作,及时发现并纠正问题,以保障机器人的正常运行。
总结回顾通过本文对库卡机器人的零点标定方法及步骤进行了全面的探讨,我们了解到零点标定是库卡机器人正常运行的基础,其准确性和可靠性对机器人的工作效率和精度至关重要。
库卡零点校正

轴的移动方向
轴的移动方向
划线标记或凹 口标记
预校正位置
机械零点位置
一个轴也许仅从“+”到“-”就可以移动到机械零点位置。如果一个轴必须从“-”到“+” 转动,它首先必须转过预校正位置的标记处,然后再返回这个标记。这是很重要的,可以 消除齿轮传动的反向间隙。
机器人在下列情况下必须校正: 校正机器人...
拿开检测头上的保护帽,装上千分表。
这个功能仅在测试[T1,T2]运行方式下有效。如果在选择这项功能时,选择另一种运行方 式,将产生相应的错误信息。
7
启动 按”开机运行”菜单键,一个菜单打开,选择“校正”选项。子菜单打开,确定选“千分 表”。
打开一个待校正的轴的状态窗口:
需要校正的轴按顺序显示,下一个需要校正的轴彩色背景显示。 已经校正好的轴不列出,如果想重新校正它,必须先取消校正。更多的详细解释参阅1.7章节。 如果轴1已经校正好,校正其它轴时它可以移动。其它手臂轴2轴到6轴也许不需要移动直到全 部轴校正完。 如果试图跨过第1轴校正第2-6轴,校正操作将失败。校正必须注意,从最小数的轴即第一轴开 始。 校正开始前,请还原手动倍率到百分之一。沿着轴的负方向将待校正的轴转过预校正位置的标 记,同时观察千分表的指针。在检测刻槽的最低位置,指针陡峭变化时,把千分表调到零。 在此之后,再次运行此轴到预校正位置,重新沿着轴的负方向转动待校正的轴。当千分表的指 针大约位于零点位置前5-10刻度时停止。为了提高校正的精度,现在最好以固定的单步更加 小心的移动机器人。为此,需要改变手动移动的进给量。
1.3.4.2 检查校正 这个功能用于旧机器人校正值的检查,机器人校正在同样的路径“设置校正”下。 这个功能仅仅在测试“T1”运行方式时有效。如果选择这个功能时,设置不同的运行方
kuka零点标定的三种方法
kuka零点标定的三种方法KUKA是一家工业机器人制造商,其机器人系统具有高精度和高可靠性。
对于KUKA机器人的零点标定,根据不同的需求和适用性,可以采用以下三种方法:1.传感器标定法:传感器是机器人系统中最常见的零点标定工具,例如激光测距仪、视觉传感器等。
传感器标定法是通过将传感器与机器人坐标系进行对齐,以实现测量精度的提升和机器人系统的定位准确性。
传感器标定法通常包括以下步骤:-标定基准:确定机器人基坐标系和传感器参考系之间的对应关系。
-数据采集:通过传感器测量机器人坐标系的位置和姿态,并记录测量数据。
-参数计算:利用采集到的数据,计算出传感器对应的误差参数,如偏移量、尺度偏差等。
-校正操作:根据计算出的误差参数,对后续的测量结果进行修正或校准,以达到高精度的测量结果。
2.基准板标定法:基准板标定法是一种常用的机器人零点标定方法,通过在工作区域中放置一个已知位置和姿态的标定板,测量机器人末端执行器与标定板之间的相对关系,从而实现机器人的零点标定。
基准板标定法通常包括以下步骤:-放置标定板:将标定板放置在工作区域中,确保标定板的位置和姿态已知。
-机器人运动:通过控制机器人进行一系列运动,使机器人末端执行器触碰到标定板上的关键点位置。
-数据采集:在机器人运动过程中,记录机器人末端执行器和标定板关键点之间的相对坐标信息。
-参数计算:利用采集到的数据,计算出机器人坐标系和标定板坐标系之间的转换矩阵。
-校正操作:应用转换矩阵对后续的机器人运动进行坐标转换,以实现定位和运动控制的高精度。
3.反向运动学标定法:反向运动学标定法是一种通过机器人的运动学模型来进行零点标定的方法。
反向运动学标定法通常包括以下步骤:-数据采集:通过对机器人执行一系列已知位姿的运动,记录机器人末端执行器的位置和姿态。
-反向运动学求解:根据机器人的运动学模型和采集到的数据,求解出机器人运动学模型中的未知参数,如关节角度、杆长等。
-参数计算:利用求解得到的运动学参数,计算出机器人坐标系和末端执行器之间的关系,如正向运动学转换矩阵。
KUKA零点校正工具“EMD”
工业机器人零点校正能有效保证机器人具有所要求的高精确度。KUKA 机器 人零点校对时有专用工具——EMD(Electronic Mastering Device) :电子控制仪。
1、EMD 的组成
KUKA 机器人的 EMD,包含“X32.1”线缆、“X32.2”线缆、零点标定盒以及 “SEMD”和“MEMD”。
②找到零点标定盒的“X32.2”标识的接口,再找对应的“X32,2”标识的线 缆,然后将线缆的插头对准零点标定盒的接口并连接好。
③查看 KUKA 机器人底座线缆接口,找到标识பைடு நூலகம்“X32”的接口,移走该接 口处的防尘盖。
④将“X32.1”的另一端插头对准工业机器人底座的“X32”接口,并连接好。 ⑤将机器人零点丢失的轴移动到预调零的位置。 ⑥在机器人本体上,找到“A1”的预零点标定位置,先借助“MEMD”或“SEMD” 移除预零点标定位置的防尘盖。
⑦将“MEMD”或“SEMD”拧到测量筒上。 ⑧最后,将测量线缆连接到“MEMD”或“SEMD”。 以上步骤就完成了对 EMD 的连接。
⑤ ①
④
②
③
① 零点标定盒 ②MEMD ③ SEMD ④“X32.2”细线缆 ⑤ “X32.1”粗线缆
细电缆是测量电缆。它将 SEMD 或 MEMD 与零点标定盒相连接。 粗电缆是 EtherCAT 电缆。它将零点标定盒与机器人上的 X32 连接起来。
2、EMD 的连接
①找到零点标定盒的“X32.1”标识的接口,再找对应的“X32,1”标识的线 缆,然后将线缆的插头对准零点标定盒的接口并连接好。
KUKA机器人零点校正
引言概述:KUKA是一种广泛应用于工业自动化领域的先进系统。
在操作过程中,确保的定位准确性是非常重要的。
零点校正技术是一项关键的技术,可以提高定位的精确性。
本文将详细介绍KUKA零点校正的相关知识。
正文内容:一、KUKA零点校正的背景和意义1.1零点校正的概念和作用1.2KUKA的工作原理和应用领域1.3零点校正对操作的影响和重要性1.4目前存在的零点校正技术的不足之处二、KUKA零点校正的原理和方法2.1零点校正的原理和基本概念2.2KUKA零点校正的方法和步骤2.3传感器在零点校正中的应用2.4零点校正中的数据处理和算法三、KUKA零点校正的具体实施3.1零点校正前的准备工作3.2零点校正程序的设置和调整3.3实施零点校正的注意事项和技巧3.4实际案例分析:KUKA零点校正的实施过程和结果四、KUKA零点校正的优化和改进4.1针对现有问题的改进方向和思路4.2采用更先进的传感器和算法4.3利用和机器学习提高零点校正的效果4.4结合其他定位技术实现更精确的零点校正五、KUKA零点校正的应用前景和挑战5.1零点校正的市场需求和前景5.2零点校正技术的发展趋势和挑战5.3KUKA在零点校正领域的竞争优势5.4建立完善的零点校正标准和规范化管理总结:KUKA零点校正是保证操作精确性的重要技术。
本文通过详细介绍了KUKA零点校正的背景和意义,原理和方法,具体实施,优化和改进以及应用前景和挑战。
正确的零点校正可以提高的定位准确性,减少误差,提高工作效率。
未来随着技术的不断发展,KUKA零点校正技术将会得到进一步优化和改进,为工业自动化领域带来更大的应用前景和发展机遇。
KUKA零点校正引言:KUKA是工业领域中的领军品牌之一,其主要用于自动化生产线或工厂中的各种任务。
在工作过程中,准确的运动控制是非常重要的,而的零点校正就是确保能够准确定位的关键步骤之一。
本文将详细介绍KUKA零点校正的概念、原理及相关实施步骤。
8.KUKA机器人零点校正
8.KUKA机器人零点校正1 为什么要标定零点完整的零点标定过程包括为每一个轴标定零点。
通过技术辅助工具EMD可为任何一根在机械零点位置的轴指定一个基准值。
因为这样就可以使轴的机械位置和电气位置保持一致,所以每一根轴都有一个唯一的角度值。
机器人位置在极短时间间隔内、机器人停止运行时或机器人控制系统关机时被持续保存。
在控制系统起动时,最新提供的分解器当前位置值将与已存的分解器位置值相比较:1.如果两个数值相等,则将绝对位置应用到增量里,机器人也就准备就绪可以运行。
2.如果两个数值存在偏差,则必须重新校准机器人2 何时需要标定零点原则上,机器人必须时刻处于已标定零点的状态。
在以下情况下必须进行零点标定:1.在投入运行时;2.在对参与定位值感测的部件(例如带分解器或RDC 的电机)采取了维护措施之后;3.当未用控制器移动了机器人轴(例如借助于自由旋转装置)时;4.进行了机械修理,必须先删除机器人的零点,然后才可标定零点:n 1) 更换齿轮箱后;n 2) 以高于 250 mm/s 的速度上行移至一个终端止挡之后;n 3) 在碰撞后。
关于零点标定的安全提示:如果机器人轴未经零点标定,则会严重限制机器人的功能:1.无法编程运行:不能沿编程设定的点运行。
2.不能在坐标系中移动。
3.软件限位开关关闭。
注意:1.对于删除零点的机器人,软件限位开关是关闭的。
机器人可能会驶向终端止挡上的缓冲器,由此可能使缓冲器受损,以至必须更换。
2.尽可能不运行删除零点的机器人,或尽量减小手动倍率3 机械零点位置的基准值4 EMD说明1.电子控制装置(EMD)用于机器人的校准。
2.EMD 与旧式库卡机器人不兼容,由于工作原理不同所以没有适配器。
3.EMD 通过接线端 X32 与 RDC (分解器数字转换器)相互连接。
5 EMD工作示意图1EMD (电子控制仪)2测量套筒3探针4测量槽5 预零点标定标记零点标定可通过确定轴的机械零点的方式进行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轴的移动方向 + 校正时,各轴必须从 “+”至“-”查找机 械零点,如果必须由 “-”至“+”转动某 一个轴,则必须先转 过预校正位置,然后 再重新回到标记处。 这样可以消除传动反 向间隙。
2005.11.20
!
OK
2005.11.20
• Three LEDs on the EMT: 1 2 3
Safety
2005.11.20
零点校正
1:为什么要做零点校正?
2005.11.20
2005.11.20
2005.11.20
2005.11.20
2005.11.20
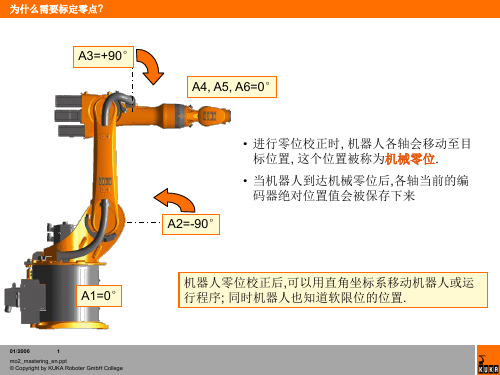
在进行机器人校正时,先将各轴置于一个定义好的机械 位置,即所谓的机械零点。这个机械零点位置表明了同 轴的驱动角度之间的对应关系,它用一个测量刻槽表示。
刻槽
2005.11.20
为了精确地确定机器人某根轴的机械零点位置,一般应先 找到其预校正位置,然后去掉测量头的保护盖,并装上 EMT(千分表) 千分表 EMT(
2005.11.20
机器人的校正必须始终在同样的温度条 件下进行,以避免由于热膨胀而引起的 误差。
EMT
刻槽 探针 机械零点 位置
2005.11.20
如果成功将显示一个偏差窗口,按数 据OK,数值被接受。(但该轴不会从 状态窗消失)。
2005.11.20
2005.11.20
检查运行(负荷校正-带偏置) 利用这个功能可以检查并且在必要时重建 机器人旧的首次校正参数,被学习过,那么首次校正的参数 将根据得到的偏差被重新计算,并且得到 操作者同意情况下被覆盖。 例如更换电机 机器人零点丢失,但技术参数还在的情况 下可以使用。
2005.11.20
2005.11.20
恢复(负荷校正-无偏置) 机器人可以带任意一个工具,该 工具可以没有做过学习,利用首 次校正时得出的数据以及当前的 数值,可以计算出差值并且对校 正参数进行相应的纠正。 与工具学习的区别:(仅测定同首次校正之 间的区别,仅仅根据在首次校正过程中得出 的绝对值折算成首次校正的参数,在恢复某 个校正之前,必须进行过首次校正。)
Basic Robot Programming, KR C2
Welcome to KUKA College!
2005.11.20
1* KUKA CRP
KUKA presentation KUKA products
Organization
GP - KR C2 - V4.1
Course aim and contents
2005.11.20
待校正的轴
2005.11.20
首次校正
机器人不带负荷(例如焊钳,抓持器等),校 正过程将存储用于每根轴的绝对检测。
工具学习(偏置学习)
机器人带负荷(例如焊钳,抓持器等),用于 首次校正的检测偏移量将针对这个负荷得出并 且存储。 检查运行(负荷校正)
检查安装在机器人上的工具的校正情况,该工 具已经被学习过,可以利用该存储的检测偏移 量折算成首次校正,并且计算和显示出同当前 校正之间的区别。
2005.11.20
2005.11.20
2005.11.20
检查运行(负荷校正-带偏置) 按软键学习,将选定待校正的轴, 该轴上有颜色标记。按住许可键 和程序向前键,选定的机器人轴 将在程序控制下由,“+”朝““运动。
如果成功将显示一个偏差窗口, 按数据OK,数值被接受。(但 该轴不会从状态窗消失)
2005.11.20
工具学习 机器人在首次校正后装上重工具或者携带 重工件(例如焊钳,抓持器等),为了使 机器人能够补偿该偏差,必须学习相应的 工具重量。 用于首次校正的检测偏移量将针对这个负 荷得出并且存储。
2005.11.20
2005.11.20
2005.11.20
工具学习
按软键学习,将选定待校正的轴,该 轴上有颜色标记。按住许可键和程序 向前键,选定的机器人轴将在程序控 制下由,“+”朝“-“运动。
2005.11.20
恢复校正 按照从小到大的秩序进行,已经校 正好的轴将不在列出。(同首次校 正一样)
2005.11.20
2005.11.20
2005.11.20
注意:
1.从一轴调到六轴。
2.调1.2.3轴时,每个轴都可以动。 3. 调5轴时不要动前4根轴,调六轴,不要 动前五根轴。
2005.11.20