基于_4相移平均的多光束干涉相位提取算法-阅(未尽)
halcon 四步相移法
halcon 四步相移法Halcon 四步相移法(Four-Step Phase-Shifting Method)是一种常用于光学相位测量和表面形貌分析的方法。
它基于干涉原理,通过改变输入光的相位来获得被测物体的相位信息,从而实现对物体形貌的测量和分析。
本文将以Halcon 四步相移法为主题,逐步解释该方法的原理和步骤,并探讨其在实际应用中的优势和应用领域。
第一步:原理介绍Halcon 四步相移法是一种使用干涉测量原理的相位测量方法。
干涉测量原理是通过将两束光线进行干涉,利用干涉光场的强度变化来获得被测物体的相位信息。
在Halcon 四步相移法中,通过改变输入光的相位,我们可以得到一系列互相差一个相位角的干涉图像。
通过对这些干涉图像进行综合分析和处理,可以得到被测物体的相位信息,从而实现对物体形貌的测量和分析。
第二步:步骤解析Halcon 四步相移法包含以下四个步骤:1. 步骤一:获取基准图像在这一步中,我们需要记录没有被测物体(或被测物体没有位移或变形)时的基准图像。
这个图像将被用作后续步骤中的参考图像,用于和其他相移图像进行比较和分析。
2. 步骤二:相位偏移在这一步中,我们需要调整输入光的相位,以获得一系列相移图像。
相位的调整可以通过改变光源的相位或使用相移元件(如全息片)来实现。
通常,我们需要获取至少三张相移图像,这样我们才能够计算出被测物体的相位信息。
3. 步骤三:相位计算在这一步中,我们使用相移图像序列来计算被测物体的相位信息。
根据相移量和相位偏移量的关系,我们可以通过简单的数学运算计算出物体的相位信息。
具体的计算公式根据实际应用的需求而有所变化,例如在表面形貌测量中,我们可以通过计算相移图像序列的频谱信息,来获得物体的相位信息。
4. 步骤四:相位重建在这一步中,我们使用得到的相位信息来重建被测物体的形貌。
具体的重建方法可以根据实际应用的需求而变化,例如在表面形貌测量中,我们可以使用相位解包算法来获得物体的三维形貌信息。
四步相移数字全息干涉术相移提取和物光重建
四步相移数字全息干涉术相移提取和物光重建张倩;徐先锋;袁红光;鲁广灿;焦志勇【摘要】提出广义相移干涉术中结合广义四步公式改进最小二乘法抽取任意相移进而重建复波的方法.利用广义相移数字全息算法的物波重建公式替代传统最小二乘法来提取参考光相位和重建物体波前,大幅减小迭代循环的计算量.使用该方法,每一次迭代计算参考相位只需要一个最小二乘法,同时利用物波前重建公式计算物光相位.这种方法的可行性和有效性已被计算机模拟证实.模拟结果表明,相移值抽取误差保持在0.004 rad左右,同比传统的四步最小二乘法算法节省大约10倍的计算时间,精度完全满足物波再现要求.光学实验也取得了令人满意的结果.%An approach of unknown phase shifts extraction and complex wave reconstruction in generalized phase-shifting interferometry is proposed by the combination of least square methods and generalized four-step formulae. A much-simplified algorithm is suggested to extract reference phase and then reconstruct object wave-front by replacing the conventional least-square method in above process with our specially derived wave reconstruction formulae for generalized phase-shifting interferometry. In this method, only one least-square equation is needed for one iteration to retrieve the reference phase, and the object phase can be calculated simultaneously. The feasibility and effectiveness of this algorithm have been verified by computer simulations. The results show that this innovation can keep the phase extraction errors mostly in 0.004 rad and save computing time by about 10 times compared with previous four-step LSM algorithm while itstill ensures its high precision. Optical experimental results are also satisfactory.【期刊名称】《光电工程》【年(卷),期】2011(038)008【总页数】6页(P139-144)【关键词】相移干涉术;相移抽取;物波重建;相位恢复【作者】张倩;徐先锋;袁红光;鲁广灿;焦志勇【作者单位】中国石油大学(华东)理学院,山东青岛266555;中国石油大学(华东)理学院,山东青岛266555;中国石油大学(华东)理学院,山东青岛266555;中国石油大学(华东)理学院,山东青岛266555;中国石油大学(华东)理学院,山东青岛266555【正文语种】中文【中图分类】O4380 引言随着信息记录器件和信息加工技术的发展,相移干涉术已经成为信息光学领域有发展前景的研究方向,已广泛应用于从光学测量到全息显微诸多领域[1-3]。
MEMS显微干涉测量系统中相位提取算法的选择与分析_待阅

第6卷 第2期2008年3月纳 米 技 术 与 精 密 工 程Nanotechnology and Precision Engineering Vol.6 No.2M ar.2008MEMS 显微干涉测量系统中相位提取算法的选择与分析郭 彤,陈津平,傅 星,胡小唐(天津大学精密测试技术及仪器国家重点实验室,天津300072)摘 要:描述了一种基于相移显微干涉术的MEMS 测试方法,达到了纳米级分辨力.从理论上分析了4种常用相移算法对测量过程主要噪声(相移器的移相误差和探测器的非线性响应误差)的抑制作用,并选定了适合本系统的Hariharan 算法.通过对经过美国国家标准研究院(NIST)认证的一个台阶高度的测量,验证了各种算法的测量精度,说明Hariharan 算法对噪声有更强的抑制作用,其测量重复性在亚纳米量级.关键词:微机电系统;相位提取算法;误差分析;Hariharan 算法中图分类号:TH741 4 文献标志码:A 文章编号:1672 6030(2008)02 0151 04Choice and Analysis of Phase Extracting Algorithm in theMEMS Microscopic Interferometric Testing SystemGUO Tong,C HEN Jin ping,FU Xing,HU Xiao tang(State Key Laboratory of Precisi on Measuring Technology and Instruments,Tianjin Universi ty,Tianjin 300072,China)Abstract :A micro elec tro mechanical syste m(ME MS)testing method was presented based on phase shifting microscopic interferometry with nanoscale resolution.Response of four common phase shifting algorithms to the main error sources(the phase shifting errors of the phase shifter and the non linear errors of the detector)were analyzed theoretically.Hariharan algorithm was chosen as the data processing method that is suitable for the system.Experiments on a step height calibrated by NIST give the accuracy of all algorithms,and the results show that Hariharan algorithm is more restrictive to the main error resources than the other algorithms and its measuring repeatability is around sub nanometer.Keywords :micro electro mechanical system(ME MS);phase extrac ting algorithm;error analysis;Hariharan algorithm收稿日期:2007 09 03.基金项目:教育部高校博士点基金资助项目(20060056003);国家高技术研究发展计划(863)资助项目(2006AA04Z302);教育部高校博士点基金新教师项目(20070056072).作者简介:郭 彤(1977 ),男,副教授.通讯作者:郭 彤,guotong@.微机电系统(ME MS)的设计和加工过程需要强大的测量工具来保证器件的性能和设计者的初衷相一致,并在工程开发中提供数据反馈.测量对象包括了器件的材料力学属性、三维形貌、动态特性以及可靠性估计等.随着ME MS 器件趋向商业化,对MEMS 设计中关键微结构测量的低公差要求越来越严格;特别是几何量测量(例如薄膜厚度和空气间隙高度),它在最终器件的执行特性(谐振频率、转换电压等)中扮演一个重要的角色[1 2].因此,研究用于ME MS 几何量测量的简单、准确和费用低廉的高精度测试方法和系统是十分必要的.由于微结构具有尺寸小的特点,非光学测试方法一般都要求测试装置与被测对象发生接触或在被测结构上附加相应的传感换能元件,这会影响微结构的完整性和机械特性.光学测试技术具有非接触、快速和高精度等优点,可实现全视场测量,能够满足微几何量测试的基本要求[3].本文系统采用了相移显微干涉方法,通过对4种常用相位提取算法的比较,选定了5帧Hariharan算法,并通过对台阶高度标准的测量实验进行了验证.1 相移显微干涉测量原理显微干涉测量的测量分辨力最高可达到亚纳米量级,适合进行ME MS上微结构几何量的测量.系统通过处理采集得到的干涉条纹图,得到被测器件的三维形貌信息.条纹图可以通过两种方式进行分析:一类是基于条纹的快速分析方法;另一类是基于相位的高精度分析方法.本文选用基于相位的条纹分析方法.1 1 基于相位的条纹自动分析方法它是一种时间域测量方法,是指对于被测物体的每一个状态,需一定时间间隔采集足够信息以获得相位,这对动态过程的相位测量有所限制.由于采用时间参数,相位的检测简化为在时间坐标上读取正弦变化相位;同时,探测点的空间坐标固定.其中外差法(H M)精度最高(约 1000, 为波长),但测量过程复杂;时间相移法(TPM)测量简便,也有很高的精度(约 100).基于相位的测量方法具有以下优点[4]:可精确确定光场上任何位置的相位,实现了全场测量;!测量精度高;∀许多相位测量方法处理过程简单,可实现测量自动化,有利于其在工业生产中应用;#当视场内条纹小于1条、无法使用条纹中心法提取信息时,仍可测量出相位值.MEMS测量系统中采用时间相移方法,利用压电陶瓷(PZT)作为相移元件,通过调整测量臂的长度(物镜和被测样品间的距离)实现高精度相移.利用基于相位的方法进行表面高度测量时,从图像信息中得到的数据是表面相位信息,它和表面高度信息具有一定的对应关系,需要经过相位 高度转换才能得到每个探测点的离面高度数据.其转换公式为 h(x,y)= (x,y)4(1)式中: 为测量光源的波长; (x,y)为图像中某探测点(x,y)处的实际相位;h(x,y)为该点转换后的离面高度.当然,得到的离面高度并不是绝对高度值,而是在假定了表面高度零点的情况下,各点相对于该点的相对高度.因此,每个点的高度值只是相对值,两点之间的差值才反映真实的高度差.1 2 常用的相位提取算法表1是几种常用相位提取算法的计算公式.通过采集不同相位间隔和不同帧数的条纹图像,然后利用表1中的公式进行计算,就可以快速得到被测物体的包裹相位信息.对包裹相位图进行相位解包裹操作,即可得到被测表面的实际相位信息[5].表1 常用的相位提取算法相位提取算法计算公式相移量3帧算法 =arctan I3-I2I1-I2!1=/4,!2=3/4,!3=5/44帧算法Wyant算法 =arctanI4-I2I1-I3!1=0,!2=/2,!3=,!4=3/2Carr∀算法 =arctan[(I2-I3)+(I1-I4)][3(I2-I3)-(I1-I4)](I2+I3)-(I1+I4)!1=-3a,!2=-a,!3=a,!4=3a(a可以是任意角度)5帧算法(Hariharan) =arctan2(I2-I4)2I3-I1-I5!1=-,!2=-/2,!3=0,!4=/2,!5=1 3 误差分析各种误差源的存在降低了利用相位提取方法进行测量的精度和重复性,因此确定和量化它们对测量结果的影响很重要,这样就可以使它们对提取相位 的影响最小.虽然各种误差源的本质被所有采用相位提取的方法所共享,但是它们对相位 的影响在每种情况下都不尽相同.没有一种相位提取算法对所有类型的误差源都免疫.通常,它们减小或是消除了某个特定误差,但同时也增大了对其他类型误差的敏感性.同样,一些相位提取算法比其他算法对某些类型误差源更为敏感,而其他误差源对它们的影响则相同.因此,每种情况下最为适合的相位提取算法依赖于具体应用的特殊性.虽然相位提取的过程中存在着多种误差,但只要系统设计合理,一般情况下,随机误差的影响就会较小.对于系统误差,在利用时间相移方法进行相位提取∃152∃纳 米 技 术 与 精 密 工 程第6卷 第2期时,影响相位提取精度的误差源主要有相移器的移相误差和探测器的非线性响应误差[6].各种相位提取算法对这两种误差的敏感程度基本上决定了相移干涉术的相位提取精度.图1为4种相位提取算法对几种主要噪声的灵敏程度,说明选择合适的相位提取算法可以抑制误差的影响.图1 4种算法对不同误差的灵敏程度图2 显微干涉模块组成示意2 实验分析显微干涉模块的组成如图2所示.系统采用了20倍的Mirau 型显微干涉物镜,装配在光学显微镜上.采用具有电容传感器反馈的纳米定位器作为相移器,最小分辨力为0 D 摄像机工作在连续采集模式,曝光时间为200ms.测量光源是中心波长为617nm 的高性能LED.实验测量了经过美国国家标准研究院(NIST)认证的标准台阶高度.测量结果如图3所示,表2给出了利用4种快速相位提取算法对44nm 标准台阶高度(标定值为(43 2%0 6)nm)进行测量的结果.图3 纳米台阶的三维形貌表2 4种算法测量结果比较2008年3月郭 彤等:ME MS 显微干涉测量系统中相位提取算法的选择与分析∃153 ∃从上面的误差分析和实验结果可以看出,Hariha ran算法与其他算法相比,对相移器的相移误差和探测器的非线性响应误差敏感程度较低,甚至具有免疫能力,使这些误差对测量的影响减小到最低,实验数据和理论分析相一致.由此可见,Hariharan算法是测试系统首选的相位提取算法.3 结 语针对相移干涉测量中的两个主要误差源 相移器的相移误差和探测器的非线性响应误差,对常用的几种算法进行了误差分析,并通过实验验证了分析结果.最后选择了5帧Hariharan算法作为测试系统的首选算法,满足了ME MS测量中的高精度要求.参考文献:[1] Bosseboeuf A,Petitgrand S.Characterization of the static anddynamic behaviour of M(O)EMS by op tical techniques[J].Journal o f Micromechanics an d Microengineerin g,2003,13:2333.[2] Bosseboeuf A,Petitgrand S.Application of microscopic interferometry techniq ues in the ME MS field[C]//Proceedings o fSPIE.Munich,Germany,2003,5145:1 16.[3] Rogala E W,Barrett H H.Assessing and optimizing the performance of a phase shi fting interferometer capable of measuring the complex index of refraction and the surface profile of a test sur face[J].J ournal o f the Optical Society o f Ame rica A,1998,15(6):1670 1685.[4] Phillion D W.General methods for generating phase shi fting interferometry algorith ms[J].Applie d O p tics,1997,36(31):8098 8115.[5] 郭 彤.基于显微干涉术的微机电系统动态测试方法与系统的研究[D].天津:天津大学精密仪器与光电子工程学院,2005.Guo Tong.Study on the Dynamic Tes ting Methods and System of ME MS Based on M icroscopic In terferometry[D].Tianjin:School of Precision Ins tru ment and Op to Electronics Engineering,Tian jin University,2005(in Chinese).[6] Hariharan P,Oreb B F,Eiju T.Digi tal phase shifting interferometry:A si mple error compensating phase calculation algo rithm[J].Applied Optics,1987,26(13):2504 2505.∃154∃纳 米 技 术 与 精 密 工 程第6卷 第2期。
多光束干涉原理

面光源 s 放在透镜L1的 焦平面上 。
接收屏s’放在透镜L2的 焦平面上。 透明板G1//G2,其相向的 平面上渡有高反射膜, 要求渡膜表面很平(与 标准样板的偏差不超过 1/20—1/50波长)。
G1G2 h
不变,法布里—珀罗标准具。
改变,法布里—珀罗标准干涉仪。
光源 s发出的光在GG’之间多次反射,透出的平行光在 L2的焦平面上形成等倾干涉条纹
2k (k 0,1,2) 时,
Amax A0 振幅极大
2k 1
Amin 1 Amax 1
1 (k 0,1,2) 时,Amin 1 A0 振幅极小
可见度愈显著
法布里—珀罗标准具的干涉花样
二、实验原理
A0
i1 G i2 G’
▲
设度银面的反射率为 A A
2
0 2 A1 则其折射率为 1 A 0
A’
I1’
I2’
I1
I1(折):
I2
I3
I11
A A0 1 A0 1
I1’(反):
2
A0 每束光振幅 N 光束总数 φ 相邻两束光之间的位相差
A A0
2
2
sin 2
sin 2
2 j
lim
1 N j ( j 1,2 ) 2 的整数倍 2 最小 A0
1 N 2 N2 1 sin 2 2
1 N 2 1 sin 2 2
????????????????2sin14122202???aa爱里函数?????????2sin141122???214????f精细度描述干涉条纹的细锐程度四极值条件2102???kk??时0maxaa?振幅极大由????????????????2sin14122202???aa???21012????kk?时0min11aa?????????????振幅极小?????????????11maxminaa??可见度愈显著讨论a与的关系?0??无论如何a几乎不变?1???420????时aamax????????????????2sin14122202???aa?稍有偏离a0
一种快速光纤干涉条纹图像相位信息提取方法

一种快速光纤干涉条纹图像相位信息提取方法段晓杰;赵鹤;汪剑鸣;王重祁【期刊名称】《计算机仿真》【年(卷),期】2018(035)010【摘要】精确提取相位信息是结构光三维形貌测量的关键,鉴于现有的光纤干涉条纹图像相位提取方法存在测量精度低,不适用于对动态物体测量的问题,提出了基于希尔伯特变换的相位恢复算法.利用两次希尔伯特变换法从单幅条纹图中获取正弦和余弦分量,由这两个分量构造解析信号,通过解析信号得到复杂图像的包裹相位信息,再通过相位解包裹实现对全场相位分布信息的获取.分别通过计算机仿真和M-Z 光纤干涉仪实际投射干涉条纹图像进行实验,结果表明,改进的方法不仅可以精确地恢复相位信息,而且大大提升了计算速度.【总页数】4页(P389-392)【作者】段晓杰;赵鹤;汪剑鸣;王重祁【作者单位】天津工业大学电子与信息工程学院,天津300387;天津市光电检测技术与系统重点实验室,天津300387;天津工业大学电子与信息工程学院,天津300387;天津市光电检测技术与系统重点实验室,天津300387;天津工业大学电子与信息工程学院,天津300387;天津市光电检测技术与系统重点实验室,天津300387;天津工业大学电子与信息工程学院,天津300387;天津市光电检测技术与系统重点实验室,天津300387【正文语种】中文【中图分类】TP301.6【相关文献】1.一种新的正弦相位调制干涉条纹相位稳定方法 [J], 伯恩;段发阶;冯帆;吕昌荣;傅骁2.一种正弦相位调制光纤干涉条纹相位稳定方法 [J], 伯恩;段发阶;冯帆;吕昌荣;傅骁3.光干涉条纹检测中的一种并行迭代相位解缠算法应用研究 [J], 王超燕;陈欣扬4.干涉条纹图像处理的相位解包新方法 [J], 万文博;苏俊宏;杨利红;徐均琪5.动态干涉条纹相位差提取方法的研究 [J], 李敏;王选择;翟中生;周浩因版权原因,仅展示原文概要,查看原文内容请购买。
正弦结构光 四步相移法

正弦结构光四步相移法
四步相移法是一种广泛应用于光学测量的高精度技术,通过采集四幅具有不同相位的正弦结构光条纹图像,结合相位差的计算,最终实现对相位信息的提取。
以下是该方法的详细步骤:
1. 准备正弦结构光条纹:首先,需要制备出正弦结构光条纹。
这可以通过使用特定的光学元件(如光栅、透镜等),或将激光束投射到具有周期性结构的物体表面来实现。
2. 采集四幅图像:将正弦结构光条纹移动特定的相位,每次相移增量为π/2,从而获得四幅不同相位的正弦结构光条纹图像。
具体而言,这四幅图像分别对应于0°、π/2、π、以及3π/2相位。
3. 计算条纹强度:对每幅图像中的条纹进行强度计算,通常采用灰度值或像素值来近似表示。
为了确保精度,可以在不同的曝光时间下拍摄多张照片,然后对结果进行平均,以减少噪声的影响。
4. 计算相位差:通过比较相邻两幅图像的条纹强度,可以计算出相应的相位差。
由于每次相移增量为π/2,所以相位差也应该是π/2的整数倍。
相位差的计算是四步相移法的核心步骤,需要采用精确的算法以确保结果的准确性。
5. 求解相位:通过将相位差累加或减小的方式,可以得到完整的相位分布。
需要注意的是,由于是通过反正切函数计算相
位信息,因此所得的相位值都是被截断在(-π,π]区间内的不连续相位。
为了得到连续的相位分布,需要进行相位展开。
四步相移法具有较高的精度和稳定性,因此在光学测量领域得到了广泛应用。
同时,该方法也可以用于其他需要提取相位信息的场合,如光学干涉、衍射等。
总之,四步相移法是一种实用、有效的相位测量方法,为光学领域提供了重要的技术支持。
4D动态激光干涉仪的原理和应用
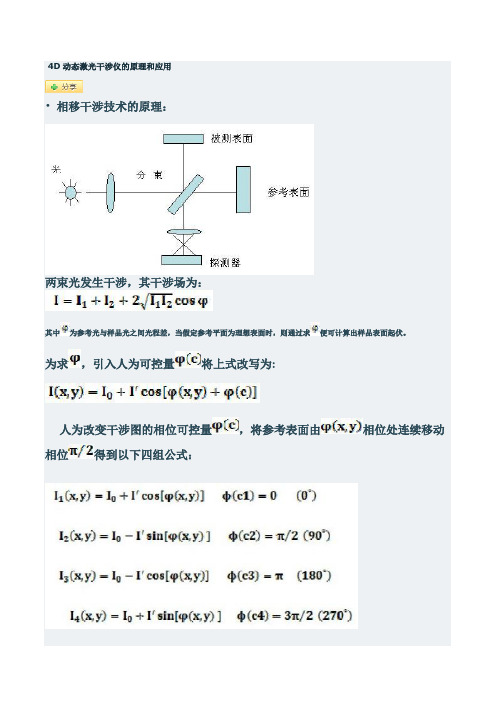
4D动态激光干涉仪的原理和应用•相移干涉技术的原理:两束光发生干涉,其干涉场为:其中为参考光与样品光之间光程差,当假定参考平面为理想表面时,则通过求便可计算出样品表面起伏。
为求,引入人为可控量将上式改写为:人为改变干涉图的相位可控量,将参考表面由相位处连续移动相位得到以下四组公式:由以上四式可得:则从而得出被测表面相对于参考表面的表面高度。
然而,传统相移干涉仪使用PZT(压电陶瓷)在时间顺序上改变,这种时间域的相移干涉仪存在一个不可忽视的问题:完成计算所需的每一幅光强图在不同时间获得。
通常CCD帧频为30帧/s,而为计算一般需要5到13帧干涉图,则总测量时间约为200至400ms。
这就引入了一系列的误差。
如在相移测量过程中由环境引起的光路中的任何变化(振动,空气扰动等)都会引起测量误差。
为解决这一问题需要在同一时间获得完成计算所需的所有相位图,这正是4D 动态干涉仪所采用的技术方案(4D通过CCD的单次曝光而获得计算所需的所有相位图)。
•4D动态干涉仪原理4D动态干涉仪采用偏振光干涉原理,将传统相移干涉仪的时间域相移转换为空间域相移,并采用其独创的相位相关的CCD技术,使得一个CCD帧频内就可实现全分辨的测量。
其原理图如下图所示:光源发出的激光经过PBS后分成偏振态不同的两束光, 其中S偏振光射向样品表面, P偏振光射向参考镜. 样品光和参考光被各自表面反射重新相会后, 由于偏振方向不同并不能发生干涉. 这样合在一起的光经过光学系统成像, 透过一块掩模板(见下图)进入CCD.掩模板(定向微偏振片阵列)的单元结构与CCD的像元一一对应相关. 上述合在一起的不同偏振态的光透过掩模板的每个单元后会发生干涉, 并且在不同像元位置发生干涉的相位是不同的. 这样, 任意一组相邻的4个像元都发生了具有固定相位差的干涉. 对每一组像元进行相移干涉计算, 就可以获得整个样品表面的形貌数据.由于像元的位相是周期变化的,则在计算时可以重复利用相邻像元,从而实现全分辨的测量。
基于干涉条纹方向的多基线高程干涉相位估计方法[发明专利]
![基于干涉条纹方向的多基线高程干涉相位估计方法[发明专利]](https://img.taocdn.com/s3/m/23128f48571252d380eb6294dd88d0d232d43c4c.png)
专利名称:基于干涉条纹方向的多基线高程干涉相位估计方法专利类型:发明专利
发明人:杨志伟,李相海,谭啸,李若楠
申请号:CN202010707604.5
申请日:20200721
公开号:CN112034457B
公开日:
20220222
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于干涉条纹方向的多基线高程干涉相位估计方法,包括:获取多基线雷达复干涉图像数据,以得到张量矩阵;根据张量矩阵计算梯度平方张量矩阵,并根据梯度平方张量矩阵估计干涉条纹方向;沿干涉条纹方向选取样本数据,并对样本数据进行处理,得到当前位置索引高程干涉相位的估计值;遍历数据张量中的全部位置索引,得到多基线高程干涉相位的估计结果。
本发明提供的基于干涉条纹方向的多基线高程干涉相位估计方法提高了估计干涉条纹方向时地稳健性,适用于噪声干扰背景下稳健估计高程干涉相位,且具有更高的估计精度。
申请人:西安电子科技大学
地址:710000 陕西省西安市雁塔区太白南路2号
国籍:CN
代理机构:西安嘉思特知识产权代理事务所(普通合伙)
代理人:李园园
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
光 学 学 报 A C T A O P T I C A S I N I C A
V o l . 3 1,N o . 1 1 , N o v e m b e r 2 0 1 1
/ 基于 π 4 相移平均的多光束干涉相位提取算法
袁 群 高志山s e E x t r a c t i o n A l o r i t h m s o f M u l t i e a m I n t e r f e r e n c e B a s e d o n -B g / h i f t i n A v e r a i n 4P h a s e-S π g g g
1 引 言
目前的干涉测量方法一般是采集多幅相移干涉
;收到修改稿日期 : 2 0 1 1 0 4 1 1 2 0 1 1 0 5 3 0 收稿日期 : - - - -
图, 根据双光束干涉光强的余弦分布特性 , 利用相移 算法计算 相 位 。 但 在 实 际 情 况 下 , 如法布里 珀罗
( ) 南京理工大学电子工程与光电技术学院 ,江苏 南京 2 1 0 0 9 4 摘要 菲佐干涉仪中如存在多光束干涉现象 , 干涉光强将不再是严格的余弦分 布 形 式 。 在 导 出 菲 佐 干 涉 仪 中 多 光 束干涉光强公式的基础上 , 给出了将其近似为理想多光束干涉光强公式的条件 。 推 导 了 对 多 光 束 相 移 干 涉 图 用 四 / / 幅算法求解的相位计算误差 , 并据此提出了基于 π 通过采集相移间隔 π 4 相移平均的多光束干涉相位提取算法 : 4 的两组干涉图序列 , 将两次计算得到的相位值平均来抑制由多光束干涉引入的 误 差 。 在 存 在 相 移 随 机 误 差 的 条 件 下, 模拟了参考面具有不同反射系数时的相位计算误差 。 用菲佐干涉仪检测 反 射 系 数 较 高 的 反 射 镜 , 采集2 2幅相 移干涉图计算波面数据 , 结果表明 : 常规相移算法计算得到的波面数据中存在明 显 的 4 倍 条 纹 周 期 的 波 纹 误 差 , 而 / 采用基于重叠四步平均法的 π 4 相移平均方法可以有效地抑制多光束干涉造成的波纹误差影响 。 关键词 测量 ; 菲佐干涉仪 ; 多光束干涉 ; 相移 ; 平均 : / 中图分类号 TN 2 1 文献标识码 A d o i 1 0. 3 7 8 8 A O S 2 0 1 1 3 1. 1 1 1 2 0 0 4
Y u a n Q u n a o Z h i s h a n i J i a n x i n h o u Y u x u a n h u G u a n G L Z C g
( I n s t i t u t e o E l e c t r i c a l E n i n e e r i n &P h o t o e l e c t r i c T e c h n o l o N a n i n U n i v e r s i t o S c i e n c e &T e c h n o l o f g g g y, j g y f g y, N a n i n J i a n s u2 1 0 0 9 4, C h i n a) j g, g A b s t r a c t h e i n t e r f e r e n c e i n t e n s i t i s n o t s t r i c t l c o s i n e d i s t r i b u t i o n i f m u l t i b e a m i n t e r f e r e n c e e x i s t s i n F i z e a u T - y y , o n t h e f o r m u l a o f i n t e r f e r e n c e i n t e n s i t i n F i z e a u i n t e r f e r o m e t e r t h e c o n d i t i o n s t o m a k e t h e i n t e r f e r o m e t e r . B a s e d y i n t e n s i t i n F i z e a u i n t e r f e r o m e t e r b e a r o x i m a t e d a s t h e i d e a l f o r m u l a o f m u l t i b e a m i n t e r f e r e n c e a r e i n t e r f e r e n c e - y p p b r o u h t . T h e c a l c u l a t e d h a s e e r r o r s o f 4 f r a m e h a s e s h i f t i n a l o r i t h m s w h e n u s i n m u l t i b e a m i n t e r f e r o r a m s a r e - - - g p p g g g g , / h a s e h a s e d e r i v e d a n d e x t r a c t i o n a l o r i t h m s o f m u l t i b e a m i n t e r f e r e n c e b a s e d o nπ 4 s h i f t i n a v e r a i n a r e - - p p g g g g : / , t w o s e u e n c e s o f h a s e s h i f t i n i n t e r f e r o r a m s w i t hπ 4 i n t e r v a l a r e c o l l e c t e d a n d t h e t w o c a l c u l a t e d r o o s e d - q p g g p p h a s e s o b t a i n e d f r o m t h e t w o s e u e n c e s a r e a v e r a e d t o s u r e s s t h e e r r o r i n d u c e d b m u l t i b e a m i n t e r f e r e n c e .T h e p q g p p y h a s e e r r o r s f o r t e s t s u r f a c e s w i t h d i f f e r e n t r e f l e c t i o n c o e f f i c i e n t s a r e n u m e r i c a l l s i m u l a t e d i n t h e c a l c u l a t e d p y o f a n d o m h a s e s h i f t i n r r o r s .A i r r o r i t h i h e f l e c t i o n o e f f i c i e n t s e s t e d i z e a u c o n d i t i o n r p - m w h r c i t b g g y e F , i n t e r f e r o m e t e r a n d 2 2 f r a m e s o f i n t e r f e r o r a m s a r e c a t u r e d t o c a l c u l a t e t h e w a v e f r o n t m a .T h e r e s u l t s i n d i c a t e g p p h a s e t h a t r i l e e r r o r s a t 4 t i m e s t h e m o d u l a t i o n f r e u e n c o f f r i n e s e x i s t i n t h e c a l c u l a t e d w h e n u s i n r o u t i n e p p p q y g g , / h a s e s h i f t i n a l o r i t h m s w h i l e t h e r o o s e d π4 h a s e s h i f t i n a v e r a i n m e t h o d b a s e d o n t h e o v e r l a i n - - p g g p p p g g g p p g a v e r a i n 4 f r a m e a l o r i t h m c a n e f f i c i e n t l s u r e s s t h e h a s e e r r o r c a u s e d b m u l t i b e a m i n t e r f e r e n c e . - - p g g g y p p y ; ;m ; ; h a s e K e w o r d s e a s u r e m e n t F i z e a u i n t e r f e r o m e t e r u l t i b e a m i n t e r f e r e n c e s h i f t i n a v e r a i n m - p g g g y c o d e s 2 0. 3 9 4 0; 1 2 0. 3 1 8 0; 1 2 0. 2 2 3 0; 1 2 0. 5 0 5 0 O C I S 1
) 、 基金项目 :教育部博士学科专项科研基金 ( 江苏省社会发展基金( 和中国科学院光学系统 2 0 1 0 3 2 1 9 1 1 0 0 1 4 B S 2 0 0 7 0 6 1) ) 先进制造技术重点实验室基金 ( 资助课题 。 K F 0 2 0 1 0 9 2 0 7 , : 作者简介 :袁 群 ( 男, 博士研究生 , 主要从事光干涉测量方面的研究 。E-m 1 9 8 6—) a i l k a r m e n 8 6 9 1 3@1 2 6. c o m , 导师简介 :高志山 ( 男, 教授 , 博士生导师 , 主要从事光学测试 、 光学设计 、 眼视光学等方面的研究 。 1 9 6 6—) : ( 通信联系人 ) E-m a i l z h i s h a o a i l . n u s t . e d u . c n @m g j 1 1 1 2 0 0 4 1 -