完整版交流电机坐标变换
交流电机数学模型与坐标变换
磁链方程
d1 Ls q1 0 d2 Lm q2 0
Lm
0 Ls 0 Lm
Lm 0 Lr 0
0 id1 i Lm q1 0 id2 Lr iq2
0 1 L 1 Te pn I T I pn I T 2 2 Lr S
LSr I 0
10
2017/9/24
交流电机数学模型与坐标变换
浙江大学电气工程学院 代入 I ,
—交流电机调速理论与方法—
I T ,可得
Te = pnLm1[(iAia+iBib+iCic)sinθ+ (iAib+iBic+iCia)sin(θ+120˚)
d c uc ic R2 dt
U RI p
5 2017/9/24 交流电机数学模型与坐标变换
浙江大学电气工程学院
—交流电机调速理论与方法—
(2)磁链方程
A LAA B LBA C LCA a LaA L b bA LcA c
—交流电机调速理论与方法—
折算后的定转子匝数相等,磁阻相等 Laa=Lbb=Lcc=Lm1+Ll2
两相间互感: (a) 定子三相彼此之间,转子三相之间彼此间的位置固定,故为常值
(b) 定子任一相与转子任一相间位置总是变化,为θ的函数
(a)类:LAB=Lm1cos120˚=-Lm1/2 LAC=Lm1cos(-120˚)=-Lm1/2 故: LAB=LBC=LCA=LBA=LCB=LAC=-Lm1/2 Lab=Lbc=Lca=Lba=Lcb=Lac=-Lm1/2 (b)类: LAa=LaA=LBb=LbB=LCc=LcC=Lm1cosθ LAb=LbA=LBc=LcB=LCa=LaC=Lm1cos(θ+120˚) LAc=LcA=LBa=LaB=LCb=LbC=Lm1cos(θ-120˚)
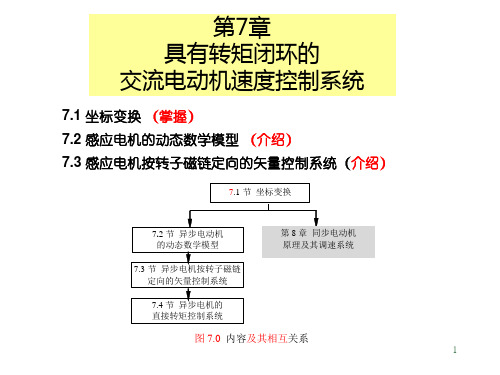
电力拖动与运动控制 第七章 7.1 坐标变换
i cos i sin
q
i Fm
sin iq iq C2 r / 2 s cos id id
1
i
iq
id
d
cos sin 式中,C2 r / 2 s sin cos 是两维旋转坐标系变换到两 维静止坐标系的变换阵。 可知 该矩阵为正交矩阵。 并且由于 其行列式的值为+1, 数学上被 称为的“第一类正交矩阵” 。
iB e
j120o
iC e
j120o
)
与上式的定义相差 2 / 3
4
B
三相总磁动势与二相总磁动势 相等时, 两套绕组瞬时磁动势在 a、 轴上的投影都应相等。
1 1 i N 3 2 i 3 N 2 0 2 1 i A 2 i 3 i B C 2
(7.1-21)
13
2、具体变换式的推导(基于直角坐标)
i Fm
1
i
1t
i
(a) {a, } 和 {d , q} 坐标 图 7.1.4 两相静止、旋转坐标系以及磁动势(电流)空间矢量
14
q i i Fm
1
iq
id
d
i
(a) {a, } 和 {d , q} 坐标 图 7.1.4 两相静止、旋转坐标系以及磁动势(电流)空间矢量
10 此时, i [id iq ]T 产生的 Fm 与图(a)中 i [i i ]T 产生的 Fm 相等。
N2
i N2
i
Fm
交流电机变频调速讲座第六讲异步电动机的动态数学模型和坐标变换
Lectures当异步电动机用于轧钢机、数控机床、机器人、载客电梯等高性能调速系统和伺服系统时,系统需要较高甚至很高的动态性能,仅用基于稳态模型的各种系统就不能解决问题了。
要实现高动态性能,必须首先研究异步电动机的动态数学模型。
由于此模型的结构比较复杂,本讲主要阐明其基本概念,介绍常用的表达形式,而略去繁琐的数学推导。
如果需要查阅更详细的数学分析,请参阅参考文献[1、2]。
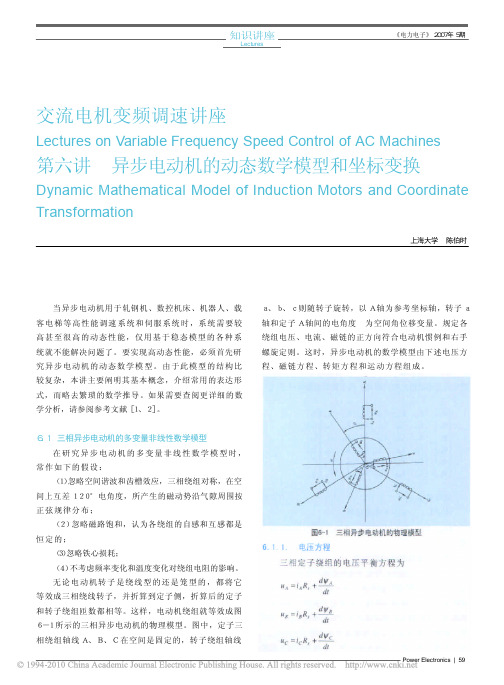
6.1 三相异步电动机的多变量非线性数学模型在研究异步电动机的多变量非线性数学模型时,常作如下的假设:(1)忽略空间谐波和齿槽效应,三相绕组对称,在空间上互差120°电角度,所产生的磁动势沿气隙周围按正弦规律分布;(2)忽略磁路饱和,认为各绕组的自感和互感都是恒定的;(3)忽略铁心损耗;(4)不考虑频率变化和温度变化对绕组电阻的影响。
无论电动机转子是绕线型的还是笼型的,都将它等效成三相绕线转子,并折算到定子侧,折算后的定子和转子绕组匝数都相等。
这样,电动机绕组就等效成图6-1所示的三相异步电动机的物理模型。
图中,定子三相绕组轴线A、B、C在空间是固定的,转子绕组轴线 上海大学 陈伯时a、b、c则随转子旋转,以A轴为参考坐标轴,转子a轴和定子A轴间的电角度 为空间角位移变量。
规定各绕组电压、电流、磁链的正方向符合电动机惯例和右手螺旋定则。
这时,异步电动机的数学模型由下述电压方程、磁链方程、转矩方程和运动方程组成。
6.1.1. 电压方程三相定子绕组的电压平衡方程为dt d R i u A s A A ψ+=dt d R i u B s B B ψ+=dtd R i u C s C C ψ+=交流电机变频调速讲座Lectures on Variable Frequency Speed Control of AC Machines第六讲 异步电动机的动态数学模型和坐标变换Dynamic Mathematical Model of Induction Motors and Coordinate Transformation图6-1 三相异步电动机的物理模型60 | Power Electronics与此相应,三相转子绕组折算到定子侧后的电压方程为dt d R i u a r a a ψ+=dtd R i u b r b b ψ+=dtd R i u cr c c ψ+=式中:c b a C B A u u u u u u ,,,,,——定子和转子相电压的瞬时值;c b a C B A i i i i i i ,,,,,——定子和转子相电流的瞬时值;c b a C B A ψψψψψψ,,,,,——各相绕组的全磁链;r s R R ,——定子和转子绕组电阻。
第一章绪论坐标变换ppt文档

考核方式
平时:课堂+作业50% 结课考试:50%
课程简介
器件:材料是基础,工艺是手段; 线路:新型拓扑结构,软开关、多电平; 控制:在了解被控对象的基础上,提出新
的方法。
课程简介
现代电力 电子技术
一个核心技术 三个基本特征 五个发展方向 多种应用领域
课程简介
一个核心技术
电源
变频电源 定频电源 开关电源 谐波电源 无功电源
课程简介
三个基本特征
电能处理与节能 弱电控制强电 高技术的支撑
课程简介
五个发展方向 A iA
B C
iB iC
i s 3/2 i s
i sd
VRVR
iimsq
1
等效直流 电机模型
异步电动机
高频高效 高功率密度 高压大功率 高功率因数 高性能
课程简介
多种应用领域
电气传动系统 电源系统 电力系统 储能系统 现代交通系统
课程简介
第一章绪论坐标变换
专业方向
❖ 全数字化交流电机控制系统 ❖ 电力电子技术和计算机技术在各种电机
控制系统中的应用 ❖ 新能源技术的开发与应用 ❖ DSP控制系统的开发和应用
目前在研
目前在研
目前在研
目前在研
如何做研究工作
敢
于
冒
险
好奇
大胆探索
挑 战 权 威
意 志 坚 强
自信
如何做研究工作
善
勇
课程主要内容
No Image
课程主要内容
1971年,美国P.C.Custman和A.A.Clark申请的专利“感应电机定子电压 的坐标变换控制”,同年德国西门子公司的F.Blasche等提出的“感应电机 磁场定向的控制原理”,奠定了矢量控制的基础。矢量控制又称磁场定向控 制(Field Orientation),即把磁场矢量的方向作为坐标轴的基准方向, 电机电流矢量的大小、方向均用瞬时值来表示。F. Blaschke 的想法是考虑 到异步电机是一个多变量、强耦合、非线性的时变参数系统,很难直接通过 外加信号准确控制电磁转矩,但若以转子磁通这一旋转的空间矢量为参考坐 标,利用从静止坐标轴系到旋转坐标轴系之间的变换,则可以把定子电流中 的励磁电流分量和转矩电流分量分解成两个垂直的直流变量,并分别进行控 制。这样,通过坐标变换重建的电动机模型就可以等效为一台直流电机,从 而可以模仿直流电机的控制策略进行快速的转矩和磁通控制。
第三讲 坐标变换

第一节 综合相量和坐标变换3-1-1三相电磁量的综合相量对于三相系统,一般多用单参考轴三相量法表示三相电磁量。
这里,介绍表示三相电磁量的三参考轴单相量法。
图3-1中的a 、b 、c 三相坐标是固定在发电机定子(电枢)空间的坐标系统,这是三参考轴。
排列顺序为,逆时针方向b 相超前a 相2/3π,c 相有超前b 相2/3π。
需要说明,与其对应,逆时针方向也作为发电子转子旋转的正方向。
图3-1 三相电磁量的综合相量如某瞬间,三相绕组的电流瞬时值为a i 、b i 、c i ,而其代数和为零(无零序电流),即a b c i i i ++=0如在三相轴线上用有向线段表示这三个电流(参阅图3-1),则在这一坐标平面上存在一电流相量j iie β=它的端点在三相绕组轴线上的投影为a i 、b i 、c i 。
相量i与三相电流a i 、b i 、c i 间的关系为:cos cos(2/3)cos(2/3)a b ci i i i i i ββπβπ=⎧⎪=-⎨⎪=+⎩)(32222c b a i i i i ++=众所周知,如三相电流是一组随时间正弦变化的正序电流,则其电流综合相量i的端点在上述空间随时间移动的轨迹为一个圆,其旋转方向为逆时针方向;如三相电流是一组负序电流,则其电流综合相量i的端点随时间移动的轨迹也是一个圆,但其旋转方向为顺时针方向。
一般讲,有一组随时间连续变化的三相电流,它满足a b c i i i ++=0,即无零序电流,其综合相量端点在图3-1所示a 、b 、c 三相坐标平面上移动的轨迹也是连续的。
这说明三相电流可以用一个相量表示。
零序量不能用综合相量表示,这是综合相量不足之处,零序量的存在只能在数学模型中反应。
综合相量与三相电流的关系,还可以用下式表示2a b c ii ai a i =++式中,算子2/3j a eπ=。
3-1-2三相电磁量综合相量的分解和合成总所周知,相量可以分解和合成,它反映了三相电磁量瞬时值的分解和合成。
交流电机坐标变换

三相静止坐标系中的交流电机性能分析
稳态性能分析
在稳态条件下,交流电机的性能可以通过在三相静止坐标 系中测量和计算得到。这包括电压、电流、功率因数、效 率和转矩等参数。
动态性能分析
在动态条件下,交流电机的性能可以通过在三相静止坐标 系中建立动态模型并进行仿真分析得到。这包括启动、调 速、制动等过程的性能表现。
效率分析
电机的效率分析涉及到电机内部损耗和输出功率的比值。在两相旋转坐标系中,可以通过 测量或计算电机的输入电压和电流来评估电机的效率。
调速控制
通过改变施加在电机上的电压或电流,可以在两相旋转坐标系中对交流电机进行调速控制 。调速控制策略通常涉及对d轴和q轴电压或电流的独立控制,以实现电机的平滑调速和 转矩控制。
性能参数
在两相静止坐标系中,可以通过计算 和分析电机的电压、电流、磁通等电 气量,得到电机的功率、效率、转矩 等性能参数。
性能分析
通过比较不同工作状态下的性能参数 ,可以分析电机的运行特性,如启动 特性、调速特性和制动特性等。同时 ,也可以通过性能分析对电机进行优 化设计。
05
CATALOGUE
交流电机坐标变换的控制策略
参数辨识
在三相静止坐标系中,可以通过测量得到的电压和电流数 据,利用算法进行电机参数的辨识,如电阻、电感等参数 。
03
CATALOGUE
交流电机在两相旋转坐标系中的分析
两相旋转坐标系的定义
两相旋转坐标系
在交流电机分析中,通常采用两相旋转坐标系(也称为dq坐 标系)来描述电机的电压、电流和磁通等物理量。该坐标系 与电机转子同步旋转,其d轴和q轴正交且随转子一起转动。
两相静止坐标系中的交流电机模型
模型建立
在两相静止坐标系中,根据电机的绕 组和磁通分布,可以建立交流电机的 数学模型,包括电压方程、电流方程 和磁链方程等。
永磁交流伺服电动机的数学模型
Tm pnf iq
(9-29)
Tr pn (Ld Lq )idiq
(9-30)
当交、直轴磁阻不同时,电感Ld和Lq不相等,因此存在 磁阻转矩。实际伺服系统中使用的多为表贴式永磁同步电机,
可以认为其转子结构是对称的,即Ld=Lq=Ls,因此有
T pnf iq
(9-31)
(4)机械运动方程:
d T TL B J dt
式中,Ld、Lq分别为三相定子绕组在d、q轴上的等效电感(单 位为H);ψf为转子永磁体产生的磁链(单位为Wb)。
(3)电磁转矩计算:
T
pn
[ f
iq
(Ld
Lq )idiq ]
(9-28)
由式(9-28)可以看出,永磁交流伺服电动机的电磁转
矩由两部分组成:一是转子永磁磁场与定子绕组q轴电流作用
产生的永磁转矩Tm;另一是由电感变化引起的磁阻转矩Tr。
转子dq坐标系下的数学模型
1.坐标变换
以功率不变为原则,dq、αβ、ABC坐标系之间的电流变
换关系如下(电压、磁链等的变换与此相同):
(1)定子静止三相ABC坐标系到静止两相αβ坐标系的
变换——Clarke变换。
ia
i
式中,
TABC-
iA iB iC
1
1 2
1
2
T ABC
2
3
0 1
dd
dt
rd
(9-26)
式中,ud、uq分别为定子电压在d、q轴分量(单位为V);id、iq 分别为定子电流在d、q轴分量(单位为A);ψd、ψq分别为定子 磁链在d、q轴分量(单位为Wb);ωr为转子的电角速度(单位为 rad/s)。
(2)磁链表达式:
坐标变换与电机统一理论
-5-
第5章 坐标变换与电机统一理论
在引入这些新的变量之后,新变量就成为待求的未知数,需要求解新的
方程。如有必要,可将新的变量求得之后,再变换成原变量。为了使新变量和
原来的变量之间有单值的联系,要求由线性变换系数所组成的行列式
不等于零,或者说矩阵C 是非奇异的。
c11, c12 ,, cnn
线性变换实质上是以适应某种需要而创建的 一种十分有效的数学方法,
xn cn1x '1 cn2 x '2
c1n x 'n c2n x 'n
cnn x 'n
(5-1)
-4-
第5章 坐标变换与电机统一理论
矩阵形式 向量形式
x1 c11 c12
x2
c21
c22
xn
cn1
cn 2
c1n x '1
c2
n
x
'2
cnn
x
'n
X CX '
和 i [i1,i2,,in,]T在新的坐标系统中电压和电流向量变为
u' [u'1,u'2 ,,u'和n ]T
i' [i'1,i'2 ,。,新i'向n ]量T 与原向量的坐标变换关
系为
电压变换阵
u
i
Cu u' Cii'
电流变换阵
(5-27)
功率不变
i T u i'T u'
i Tu (Ci i')T (Cu u') i'T CiTCuu'
分析中,所应用的坐标变换可有两种约束: 1) 功率不变约束,即变换前后功率保持不变。 2) 合成磁动势不变约束,即变换前后合成磁动势保持不变。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
按k=n-1,n-2,…,1,0的顺序,将各特征根代入上式就 得到n个特征向量。
n个特征向量构成了如下的变换矩阵:
?1
1?
F?
1
? a n?1 ? a 2( n?1)
a n?2
?
a 2(n?2) ?
n? ?
??
??a (n?1)( n?1) a (n?1)(n? 2) ?
1 1? a 1? a 2 1? ? ?? a n?1 1??
????????ii?n2
? ? ??
?
L cIc
2-2: 循环矩阵的对角化
1. 电感矩阵的特点 2. 循环矩阵的对角化 3. 电感矩阵的对角化 4. 变换矩阵的一般化 5. 三阶循环对称电感矩阵的变换
2-2.1 电感矩阵的特点
#由于互感的对等性,电感矩阵是对 称矩阵:
? LA M AB M AC ?
这样,矩阵π的n个特?征根由? 下1式给? 出:0 n
解这个方程得到 n个特征根:
若记 则
?k
?
ej
2?
n
k
,
k ? 0,1,2,?
,n ?1
a
?
ej
2? n
?k ? a k
为求与特征根 λk对应的特征向量,将之代入特
征方程,并令 x1 ? 1/ ,n得
? X k ?
11 n
?k
?
2 k
?
? ? n ? 1 T k
Li ? Lj , Mi, j ? Mi?1, j?1
这样的矩阵称为循环矩阵。n阶循环矩阵只有n个不同的元素:
? LA M AB M AC ?
L ? ?????MMM?AAAMNB
LA
M AN ?
M AC
M AB
LA ?
M AD
?
?
? ?
M AN ?
M AM
M AL ?
LA
? ? ? ? ?
若n阶循环矩阵又是对称的,则根据n是奇数或偶数,其中只 有(n+1)/2或(n+2)/2个不同的元素。
其中
L c ? T ?1 ?L ?T
如果变换T明显使得新的电感矩阵Lc较变换前的电感矩阵L 简单,这个变换才是有意义的。如果Lc变成一个对角矩阵, 那这个变换是最理想的:
??1 ? ?L1 0 ?
Φc
?
???????n2
? ? ??
?
?0
? ??
? 0
L2 ? ?? 0?
0 ??i1 ?
0 ? Ln
?? A ? ? LA M AB ?
Φ
?
???????NB
? ? ??
?
????MM?NBAA
LB ?
M NB
?
? ?
M AN ??iA ?
M BN ?
LN
????????ii?NB
? ? ??
?
L
?I
假定存在一个非奇异矩阵T,将Φ变换成Φ c,将I 变换成I c:
Φ ? T ?Φ c , I ? T ?Ic ,
由此得到更加一般化的变换矩阵
?
e j?n?1
e j?n? 2
?
Fg ?
n?1 j?n?1
1 ?? aa ee 2( n?1) j?n?1 n? ?
#最简单的循环矩阵
?0 1 0 0 ? 0? ?0 0 1 0 ? 0? π ? ?? ? ? ? ? ?? ?0 0 0 0 ? 1? ??1 0 0 0 ? 0??
不难证明,循环电感矩阵可以表示成
L ? LA1 ? M ABπ ? M ACπ 2 ? ? ? M ANπ n?1
根据矩阵理论,任何可以对角化矩阵π 的变换T,也可以对 角化循环矩阵L 。矩阵π 称为置换矩阵。
第二章 交流电机 的坐标变换
2-1: 变换概述 2-2: 循环矩阵的对角化 2-3:1、2、0及F、B、0坐标系统 2-4:α、β、0坐标系统 2-5: d、q、0坐标系统 2-6: dc、qc、0坐标系统 2-7: 任意速坐标系统 2-8: 结论
2-1: 变换概述
一个电机系统的磁链方程可以写成:
Φc Ic
? ?
???i11
?2 ?
i2 ?
in??n ?
新的磁链φ1、 φ2、…、 φn称为实际磁链φA、 φB、…、 φN的分 量;同样i1、i2、…、in称为实际电流的分量。
利用这个变换,磁链方程变成:
T Φ c ? L ?TI c
所以
Φ c ? T ?1 ?L ?TI c
或者
Φ c ? L c ?I c
2-2.2 循环矩阵的对角化
n阶置换矩阵π的n个特征根由下面特征方程给出:
或者 因此
πX ? ?X , X ? ?x1 x2 ? ? xn T
x2 ? ?x1 , x3 ? ?x2 ,
??
xn ? ?xn?1 , x1 ? ?xn
x1 ? ?xn ? ?2 xn?1 ? ?
? ?n?1x2 ? ?n x1
这个变换矩阵将使置换矩阵π变成如下的对角矩阵:
?a n?1 0 ? ? 0 an?2 ? D ? F?1πF ? ? ? ? ? ?0 0 ? ?? 0 0 ?
0 0? 0 0? ? ?? a 0? 0 1??
2-2.3 电感矩阵的对角化
? D ? F ?1πF ? π ? FDF ?1
由此可以推导得
L ? ?????MMM?AAANCB
LB
M BC ?
M BN
M BC
LC ?
M CN
?
?
? ?
M AN ?
M BN
M CN ?
LN
? ? ? ? ?
由于Mij=Mji, n阶对称矩阵中只有n(n+1)/2各不同 的元素。
#n相对称系统的电感矩阵是循环的
n相对称系统中各相自感相等,相同相对位置的两相 间的互感相等。即:
?
M
Dn?1
AN
由于D,D2,…,Dn-1是对角矩阵,因此L T 也是一个对角 矩阵:
LT
?
? ? diag?? ?
LA LA
? M ABa n?1 ? ? M ABa n? 2 ?
LA ? MABa
M a 2(n?1) AC
?
?
M a 2(n?2) AC
?
?
?
? M ACa 2 ? ?
? M a (n?1)(n?1) AN
π 2 ? {FDF ?1}?{FDF ?1} ? FD 2F ?1
同样地
π 3 ? FD 3F ?1 ,? ,π n?1 ? FD n?1F ?1
这样
L ? F( LA1 ? M ABD ? M ACD2 ? ? ? M ANDn?1)F ?1
变换后的电感矩阵
LT ? F?1LF ? LA1 ? MABD ? MACD2 ? ?
?
M a (n?1)(n?2 AN
? M ANa ( ? M AC ? ? ? M AN
?
2-2.4 变换矩阵的一般化
若在生成特征向量时,不是令x1=1,而是令其等于 一个模为1的复数,则
? ? Xk ? e j?k 1 ?k ?k2 ?
?n?1 T k