基于ARM处理器的PC/104处理器模块的开发(论文)
《基于ARM处理器的通用数控系统的研究与设计》

《基于ARM处理器的通用数控系统的研究与设计》一、引言随着现代工业的快速发展,数控系统作为现代制造技术的重要组成部分,其性能和效率的优化已成为工业生产的关键。
而ARM处理器以其低功耗、高性能的特点,在嵌入式系统中得到了广泛应用。
因此,基于ARM处理器的通用数控系统的研究与设计具有重要的现实意义。
本文旨在探讨基于ARM处理器的通用数控系统的设计原理、实现方法及其在工业生产中的应用。
二、ARM处理器与数控系统概述ARM处理器是一种基于精简指令集(RISC)架构的低功耗、高性能的嵌入式处理器。
由于其高度的可扩展性和定制性,被广泛应用于工业控制、智能设备等领域。
数控系统则是通过数字信息实现对机械设备加工过程的全自动化控制,其性能直接影响着设备的加工精度和效率。
将ARM处理器应用于数控系统中,可以实现设备的智能化控制,提高设备的加工效率和精度。
三、系统设计1. 硬件设计基于ARM处理器的通用数控系统的硬件设计主要包括ARM 处理器核心板、电源模块、存储模块、通信模块等。
其中,ARM 处理器核心板负责处理数控系统的各种任务,电源模块为系统提供稳定的电源供应,存储模块用于存储程序和数据,通信模块则负责与其他设备进行数据交换。
2. 软件设计软件设计是数控系统的核心部分,主要包括操作系统、控制算法、人机交互界面等。
在操作系统方面,选择适用于ARM处理器的嵌入式操作系统,如Linux或Windows CE等。
控制算法则是根据具体的加工需求和设备特性进行设计和优化,以实现高精度的加工控制。
人机交互界面则负责将操作人员的指令转化为计算机可识别的语言,并实时显示设备的运行状态和加工结果。
四、关键技术及实现方法1. 运动控制技术运动控制技术是数控系统的核心技术之一,主要包括插补算法和伺服控制算法。
插补算法用于计算加工路径的中间点,以实现高精度的加工;伺服控制算法则用于控制设备的运动轨迹和速度,以保证加工的稳定性和精度。
2. 通信技术通信技术是实现数控系统与其他设备进行数据交换的关键技术。
基于arm9s3c2410实验开发板的硬件设计【毕业论文,绝对

毕业设计(论文)题目:基于ARM9-S3C2410实验开发板的硬件设计Title:Hardware Design of ARM9-S3C2410 Experiment Board学生姓名:袁斌学号:07022110指导教师:徐哈宁专业:测控技术与仪器二零一一年六月摘要三星S3C2410微处理器是一个采用ARM920T内核,高性能、低功耗、低成本的16/32位RISC处理器。
基于S3C2410的最小系统核心板是一个独立模块,根据需求它可以直接与用户板模块结合进行速度、快捷、费用合理的开发利用。
本论文设计并实现了一种基于S3C2410处理器的实验开发板,通过这个平台可以进行中断服务、时钟控制、通信接口、AD采样、IO口等无操作系统的基础实验并可进行Linux等嵌入式系统的移植实验。
同时通过该平台也进行相关的功能扩展,以及进行所需的产品设计。
硬件部分的设计是应用Protel 99 SE软件完成的,综合了许多原理图设计思想,进行取优弃弊,结合实际应用的考虑,以功能模块思想作引导,认真核对每一个引脚及其网络连接,采用两层板,通过原理图的绘制,原理图的修改,PCB的布局布线再经过印刷、安装器件形成开发板。
该开发板在保证学生完成ARM技术学习开发的同时,考虑了系统的扩展、电路板的面积、散热、电磁兼容性,以及安装等问题。
因此,该板也可以作为嵌入式系统主板,直接应用在实际系统中。
关键词:ARM9;最小系统;开发板;S3C2410ABSTRACTS3C2410 of SAMSUNG’s 16/32-bit RISC microprocessor is a product designed with cost-effective, low-power, and high-performance. The S3C2410 was developed using an ARM920T core. The core board with minimum based on the S3C2410 is a independent modules. combined directly with user board it could be given a utilization as client’s need speed, fast and reasonable-cost.This paper designs and completes an experiments development board based on S3C2410 processor. Through this platform we can make the basis experiments without the operating system as interrupt-service, clock control, communication interface, AD sampling, IO interface experiment and so on, and we can also carry out the Linux Embedded System transplantation experiments . At the same time, it also make the expansion of related functions and carries out the necessary product design through the platform. Integrating many ideas, considering the practical application, and bringing essence together finally the development board was completed after the schematic is drew and modified, the PCB board is arranged and routed, then components fixed on the two-lamellar board. with the software Protel99 SE.On the one side this development boards ensures students to complete the study of the ARM technology exploitation, on the other side it considers the expansion of the system、the size of circuit boards、dispelling thermal、electromagnetic compatibility and installation issues etc. Therefore, this board can be used as embedded system mainboard in application of the actual system directly.Key words:ARM9; minimum system; development board; S3C2410目录绪论 (1)1.1 课题的背景、意义 (1)1.2 国内外相关领域研究进展 (2)1.3 课题内容 (2)2ARM微处理器的概述 (4)2.1 嵌入式系统简介 (4)2.1.1 嵌入式系统的定义 (4)2.1.2 嵌入式系统的组成 (4)2.1.3 嵌入式系统的特点 (5)2.1.4 嵌入式系统的发展 (6)2.2 嵌入式操作系统 (6)2.3 ARM处理器 (7)2.3.1 ARM的体系结构 (7)2.3.2 ARM微处理器的应用领域 (8)2.4 ARM92OT体系结构 (8)2.4.1 ARM92OT系统结构分析 (8)2.4.2 ARM920T的工作状态 (9)2.4.3 ARM920T体系结构的存储器格式 (9)2.4.4 ARM920T处理器模式 (10)3基于ARM9-S3C2410开发板的硬件设计 (12)3.1 PROTEL 99 SE简介 (12)3.2 系统设计概述 (12)3.3 S3C2410处理器及片外围简介 (13)3.4 单元电路设计 (15)3.4.1 电源电路 (15)3.4.2 串行接口电路设计 (15)3.4.3 IIC总线接口电路设计 (16)3.4.4 复位按键电路 (17)3.4.5 调试接口电路的设计 (18)3.5 开发板硬件原理图 (19)4. 开发板硬件的PCB板设计 (21)4.1 PCB的基本概念 (21)4.1.1 高速电路定义及高速信号确定 (21)4.1.2 传输线 (22)4.2 高速PCB信号线的布线 (23)4.2.1 高速PCB信号线的布线基本原则 (23)4.3.2 地线设计 (24)4.3 布线后信号完整性的PCB板 (24)4.4 提高该板抗电磁干扰能力的措施 (28)结论与展望 (29)致谢 (30)参考文献 (31)附录1 (32)附录2 (38)附录3 (43)绪论1.1课题的背景、意义嵌入式系统是指以应用为核心,以计算机技术为基础,软硬件可裁剪,适应应用系统对功能、可靠性、成本、体积和功耗等方面的严格要求的专用计算机系统。
探讨PC104的无人直升机飞行控制系统设计
探讨PC104的无人直升机飞行控制系统设计1. 引言现今无人机(UAV)的研究和发展越来越受到世界各国的重视。
其中飞行控制系统是无人直升机飞行控制的核心部分。
飞行控制系统的复杂性和实时性对所使用的嵌入式控制系统软件有很高的要求,而Linux 系统基本可以满足要求,同时由于其开源特性,正越来越多的被应用于飞控系统设计开发中,目前较为成熟的嵌入式Linux 系统多建立于ARM 系列芯片上,其具有开发时间短、可参考资料多、开发成熟度高、能耗低、体积小的优点,因此在民用嵌入式解决方案中被广泛采用。
但基于ARM 的系统由于其自身结构的限制,并不适用于高计算强度、高可靠性的应用。
所以本文提出了一种基于AMD Geode 系列处理器的PC/104模块加定制Linux 系统的控制系统方案提高该系统的可靠性。
2. 系统总体设计说明本文所研究的直升机飞行控制系统,其硬件由双工数传电台、飞控计算机、下级控制器、捷联惯导系统、发动机控制单元ECU、任务设备管理器、R/C 接收机、地面测控系统等组成。
PC/104的外部接口包括一个I/O模块和四个串口。
其中任务设备管理器通过I/O模块和机载的任务设备进行通讯,传输的信号为模拟信号和数字信号;串口分别和数传电台、捷联惯导系统、下位机控制器和发动机控制器进行通讯。
捷联惯导系统通过串口为飞控计算机提供无人直升机飞行过程中所有的飞行状态和导航信息,包括姿态角、航向角、三轴角速率、三轴线速度、线加速度、飞行位置等等。
捷联惯导系统还通过串口和下位机控制器相连接。
数传电台用于和地面测控系统进行无线链路通讯。
它接收地面测控系统的控制指令进行自主及各种模态的自动飞行以及机载工作设备的管理和控制等。
而地面测控系统通过数传电台接收机上的各种遥测信息、系统状态数据、任务工作设备的状态数据等。
下位机控制器通过串口和飞控计算机相连,接收其控制器输出信号,驱动总矩、俯仰、横滚和方向舵机的运动;在系统调试阶段利用RC遥控器共同完成无人直升机的手动模式飞行。
SPARC V8处理器基于PC 104嵌入式计算机模块设计说明书
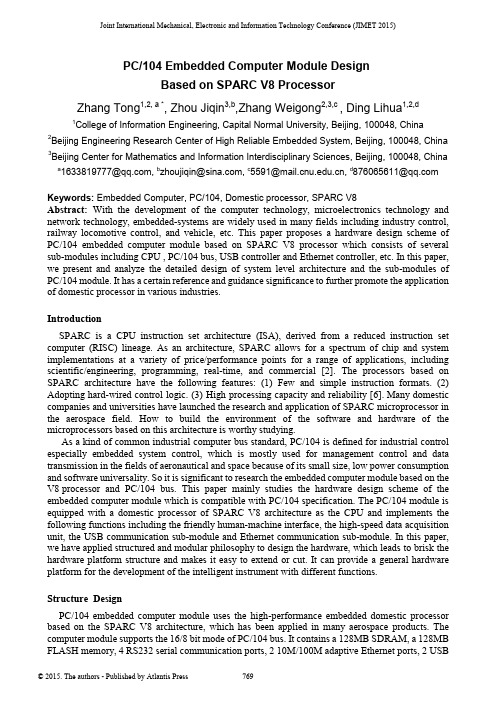
Joint International Mechanical, Electronic and Information Technology Conference (JIMET 2015)PC/104 Embedded Computer Module DesignBased on SPARC V8 ProcessorZhang Tong1,2, a *, Zhou Jiqin3,b,Zhang Weigong2,3,c , Ding Lihua1,2,d1College of Information Engineering, Capital Normal University, Beijing, 100048, China2Beijing Engineering Research Center of High Reliable Embedded System, Beijing, 100048, China 3Beijing Center for Mathematics and Information Interdisciplinary Sciences, Beijing, 100048, China a*****************,b******************,c*************,d****************Keywords: Embedded Computer, PC/104, Domestic processor, SPARC V8Abstract: With the development of the computer technology, microelectronics technology and network technology, embedded-systems are widely used in many fields including industry control, railway locomotive control, and vehicle, etc. This paper proposes a hardware design scheme of PC/104 embedded computer module based on SPARC V8 processor which consists of several sub-modules including CPU , PC/104 bus, USB controller and Ethernet controller, etc. In this paper, we present and analyze the detailed design of system level architecture and the sub-modules of PC/104 module. It has a certain reference and guidance significance to further promote the application of domestic processor in various industries.IntroductionSPARC is a CPU instruction set architecture (ISA), derived from a reduced instruction set computer (RISC) lineage. As an architecture, SPARC allows for a spectrum of chip and system implementations at a variety of price/performance points for a range of applications, including scientific/engineering, programming, real-time, and commercial [2]. The processors based on SPARC architecture have the following features: (1) Few and simple instruction formats. (2) Adopting hard-wired control logic. (3) High processing capacity and reliability [6]. Many domestic companies and universities have launched the research and application of SPARC microprocessor in the aerospace field. How to build the environment of the software and hardware of the microprocessors based on this architecture is worthy studying.As a kind of common industrial computer bus standard, PC/104 is defined for industrial control especially embedded system control, which is mostly used for management control and data transmission in the fields of aeronautical and space because of its small size, low power consumption and software universality. So it is significant to research the embedded computer module based on the V8 processor and PC/104 bus. This paper mainly studies the hardware design scheme of the embedded computer module which is compatible with PC/104 specification. The PC/104 module is equipped with a domestic processor of SPARC V8 architecture as the CPU and implements the following functions including the friendly human-machine interface, the high-speed data acquisition unit, the USB communication sub-module and Ethernet communication sub-module. In this paper, we have applied structured and modular philosophy to design the hardware, which leads to brisk the hardware platform structure and makes it easy to extend or cut. It can provide a general hardware platform for the development of the intelligent instrument with different functions.Structure DesignPC/104 embedded computer module uses the high-performance embedded domestic processor based on the SPARC V8 architecture, which has been applied in many aerospace products. The computer module supports the 16/8 bit mode of PC/104 bus. It contains a 128MB SDRAM, a 128MB FLASH memory, 4 RS232 serial communication ports, 2 10M/100M adaptive Ethernet ports, 2 USBports and a VGA display port with 1600*1200 display resolution. In this PC/104 module, we have configured VxWorks operating system including BSP, USB keyboard mouse driver, Ethernet driver, UART driver, TFFS file system and other software driver [1]. Drivers are designed for the corresponding hardware devices, such as USB, Ethernet, UART and display control circuit to manage the underlying hardware, which can provide a standardized and hardware-independent interface to the high-level application software. Fig. 1 shows the main block diagram of PC/104 embedded computer module.Fig. 1 The main block diagram of PC/104 embedded computer moduleHardware Module Design Based on Domestic ProcessorCPU Sub-module A 32-bit microprocessor based on SPARC V8 architecture with the high degree of integration and high performance is adopted in this design. Fig. 2 shows the internal structure of the processor. From Fig. 2, we can see the processor chip contains an on-chip integer processing unit IU, a floating-point unit (FPU), independent data caches and instruction caches, 5 stage pipeline, hardware multiplier and divider and so on. Moreover, interrupt controller, hardware debug unit with tracking buffer storage (DSU), two common timer (timer0, timer1), serial interface, PCI interface, watchdog timer and memory controller supporting PROM, SRAM, SDRAM and I/O space accessing and so on are integrated in this processor chip[4].Fig. 2 The structure diagram of SPARC V8 CPUPC/104 Bus Sub-module The electrical logic of PC/104 specification uses ISA bus specification. It defines two types ofaddress space including I/O space and memory space, supporting 8-bit and 16-bit data accessing. The hardware of PC/104 can configure 11 interrupt sources and provide 7 DMA Channels. Due to the characteristics of V8 processor chip, in the designing of PC/104 module, we use dual space mapping mode to support the 8/16 read-write functions of PC/104 bus. The I/O space of V8 processor has the following two regions:(1) One region is used to deal with the 16-bit read-write functions of PC/104 bus, which can be divided into two subspaces, namely I/O space and memory space. The PC/104 bus accessing operations to this space are all considered to be 16-bit read-write mode. In this region, the MEMCS16# and IOCS16# signals are all ignored (assuming the device accessed is 16 bits).(2) Another region is specifically designed for 8-bit read-write functions of PC/104 bus, which can also be divided into two subspaces, namely IO space and storage space. The PC/104 bus accessing operations to this space are considered to be 8-bit read-write mode. The accessed device is served as an 8-bit device or a 16-bit device by the MEMCS16# and IOCS16# signal and the PC/104 data bus is mapped into the corresponding space of the processor.In order to improve the efficiency of bus accessing and the controlling flexibility, we implement the bus sequential control logic circuits on a FPGA chip. Through this designing method, the PC/104 bus sequence can be set flexibly by configuring the software, for example, the length (T1) of the address latch signal (BALE) or the default length (T2) of the bus access cycle can be changed by modifying the control register. The PC/104 bus sequence waveforms are shown in Fig. 3. In this figure, the term T4 is the time gap between the BALE falling edge and read-write signal falling edge, which has a minimum value of zero.As shown in Fig. 3, the length of T1 can be set by the BALEW domain of PC/104 bus sequence control register (ISATIMING). The length of T4 is 0~10ns. The length of T3 is T2-T1-T3. The default value of T2 is set by the ISAW domain of ISATIMING register.Fig. 3 PC/104 bus waveform DiagramUSB Sub-module In this paper, we use CH374U (produced by Nanjing QinHeng Electronics Co.,Ltd.) as the USB controller of PC/104 embedded computer module and implement two USB1.0 ports (usb0, usb1), which can connect keyboard, mouse, or the other USB external devices. The interface of USB adopts PulseGuard ESD protection circuit to implement the over-voltage protection. CH374U supports both USB-HOST and USB-DEVICE mode with root hub of 3 ports. It has multiple transmission method, including low speed and full speed control transmission, bulk transmission, interrupt transmission, and synchronous transmission. CH374U uses four I/O registers to interact with the CPU and can generate an interrupt request to CPU. The four registers are all adopted 16-bit accessing mode, but only low 8 bits are effective. High 8 bits are read with constant zero and writing in is arbitrary. The hardware block diagram of USB is shown in Fig. 4.Fig. 4 USB signal connection diagramEthernet Sub-module The two-way 10M/100M adaptive Ethernet interface (LAN1, LAN2) is implemented with the module using DM9000CIEP owned by Davicom Semiconductor, Inc. In order to improve the reliability of the internal work of the PC/104 embedded computer module, the double isolation interface scheme is adopted in the Ethernet interface, namely the input and output signals separated by the transformer. Two way Ethernet interfaces can work independently and also can be redundant backup for each other used under the driver management [5]. The hardware block diagram is shown in Fig. 5.ADRESSBALER/WIOCHRDYRead DataWrite DataFig. 5 Ethernet signal connection DiagramTest resultsThe cast plate is made according to the above design and the module real figure is shown in Fig. 6. The PCB boards are put to the test and the tests are mainly about the validity of the various functions modules of the PC/104 embedded computer module. The tests are mainly as follows:Fig. 6 Module physical Diagram(1) CPU functional testing, the main function is to test the cache, perform the same cycle, it is 19us to open the cache code, 195us to close the cache code time.(2) In order to test the PC/104 module more fully, we design a motherboard with a CPLD chip which implements several registers including ISA bus interrupt request control register, accessing latency control register, clock-timing registers.The V8 PC/104 computer module can access these functional registers by internal ISA bus in order to control the CPLD to generate the bus interrupts or modify the bus latency. Using these control method, we can implement the test of PC/104 module.The generation and clear of the PC/104 bus interrupt signal is controlled by the interrupt request register and the interrupt enable register, which is how the bus interrupt signal is tested.The bus access cycle controller is mainly to test the validity of the bus access after inserting the different length of wait states the maximum of which is 256us. These waiting for the cycle controllers is only effective for testing the functional registers (IO address 0000 ~ 00FFH). The signal IOCHRDY is in the state of high resistance and the default cycle is adopted while the registers are accessed by other ISA address.The timer is set with a kind of bus clock when the clock timing is tested. And firstly the 33MHz (CPLD operating clock), 14.318MHz (bus BCLK clock), 14.318MHz (bus OSC clock) are respectively divided into 1MHz by an internal frequency divider, and then the signal is stipulated-timing-controlled by a set of registers. When it comes to overflowing in the timer, the interrupt request is applied to the ISA bus by the interrupt request signal (IRQ12, 14 or 15). And the timer can be tested by software reading the timer count.(3) Ethernet communication test: Two way Ethernet are connected to the test monitoring computer with the router. Ethernet transferring the data is normal and the average transfer rate is about 1Mbps, and the error rate is zero, and the packet loss rate is zero.(4) In the operating system, SDRAM memory which is not occupied by the operating system is accessing tested. In order to accurately test the validity of the data bus, writing-in data must have wide adaptability, including 0x55555555、0xaaaaaaaa、0x1、0x2、0x4、0x8、0x10、……、0x80000000. The data in two formats is mainly tested for reading the preliminarily stored data in the FLASH memory. One is the binary data stored in the space that is not changed into the file system, the other is a file stored in the file system, and the test results are correct. Display images and memory access test: After receiving the test command, the specific graphics display functions are called so that the specific graphics can be displayed on the display and the read and write accessing to the display buffer memory is normal. In the RS232 communication test, four RS232 interfaces of the V8 PC/104 computer module are two-two interconnected to send and receive data, and serial data transmission is normal, and the average Baud rate is about 90kbps, and the error rate is zero.ConclusionsThe embedded system has been widely used in the field of industrial control, such as industrial process control, intelligent instrument, and numerical control system. Especially with the network technology and communication technology rapidly booming, the networked site of the industrial control has become a trend. In this paper, after studying the development situation of the embedded system at home and abroad, the relatively complete solution to the embedded application system is designed with a high-performance domestic embedded processor based on SPARC V8 architecture. And the 128MB bytes of FLASH that is used to store all the program codes and parameters is extended in this system and the 128MB bytes of SDRAM that is used to store running programs and data is extended in this system and PC/104 bus is extended in this system to improve the efficiency of bus access and control flexibility. Moreover, USB, Ethernet communication interface and etc. are designed in this system. The testing results indicate that the function indexes and performance indexes meet the requirements. This module is featured in a small size, powerful functions, low power consumption, high reliability, good compatibility and low cost [3], which means it can be applied in different fields of the industrial occasions.AcknowledgmentsThis work was supported in part by the National Natural Science Foundation of China (No.61170009, No.61472260, No.61402302); Beijing Natural Science Foundation of China (No.4132016, No.4143060); the Project of Construction of Innovative Teams and Teacher Career Development for Universities and Colleges Under Beijing Municipality(No.IDHT20150507); the Scientific Research Base Development Program of the Beijing Municipal Commission of Education. References[1] Zhang Lihong, Ren Yu, Chen Jianzheng, Data Acquisition System Based On PC/104, Engineering and Test,2009,3[2] The SPARV Architecture Manual, Version 8[3] Cao Zhijin, Hou Xia, Wu Qiuping, Master-slave data acquisition systems and applications based on PC/104,Electrical Measurement and Instrumentation, 2003,4[4] Yu Dan, Zhang Zhuancheng, Feng Lijie, Lai Yuqiang, LEON2 processor-based SoC designs based on LEON2 processor, Modern electronic technology, 2005[5] Chen Yi, Wang Lei, Zhou guojia, Li Zhe, Radiation Monitoring Network and Ethernet Interface Based On CAN bus, Nuclear Electronics and Detection Technology,2011[6] Zhu Xiaoyan, Zhang Weigong, Wang Jianfeng, Duan Qingya, and Liu Shurong, “The design of high reliable serial system BUS”. Proceedings of Computer Design and Applications, Qinhuangdao,Hebei, China, 25-27 June 2010; pp.V4-14-V4-17.。
基于ARM体系的PC/104总线设计

O 前
言
A M 在设计 上基 于 S C思 想 , 每一 个 具 体 应 用 , R o 对 优 先 考虑 使用 集成周 边 设 备 可能 性 最 大 的单 一 芯 片 , 但
在 板极 扩 展 方 面 仍 然 缺 乏 能 被 广 泛 接 受 的 新 工 业
基于PARADIGM IDE开发PC104嵌入式系统的RAM配置方法
基于Paradigm IDE开发PC104嵌入式系统的RAM配置方法摘要:描述了Paradigm C++IDE嵌入式系统开发工具的功能和应用范围,并介绍了PC104嵌入式计算机系统的性能和特点,重点说明了在Paradigm环境下开发基于PC104的应用系统的存储空间的设置和实现方法。
关键词:Paradigm、PC104、嵌入式系统、RAM地址设置一、Paradigm IDE–16位和32位x86嵌入式开发工具1、Paradigm C++Professional IDEParadigm C++Professional是美国Devtools公司用于开发嵌入式系统应用的集成开发环境,它支持嵌入式x86系统,包括一个x86的集成开发环境(IDE)。
包含了编译、汇编、链接、定位和调试功能,支持20-bit地址空间(1MB)的实模式目标系统,支持由Emutec公司提供的PROMJet ROM仿真器调试接口。
通过Paradigm C++Professional集成开发环境,可以编辑嵌入式C/C++代码,支持实模式,扩展模式和保护模式的嵌入式x86开发系统。
通过使用ParadigmC++Professional package,可以迅速生成一个项目,通过可视化的应用界面,Windows2000的操作风格,进行编译、汇编、链接以及代码的定位,最后生成嵌入式应用程序。
可以快速、方便的完成嵌入式系统的代码开发。
集成开发环境的主要工具有:编辑器(Editor)、C/C++编译器(Compiler)、汇编器(Assembler)、链接器(Linker)、定位器(Locator)、集成调试器(Integrated debugger)。
2、Paradigm IDE系列支持的处理器(CPU)2.1实模式:所有x86实模式处理器和内核包括:①AMD Am186EM,λAm186ES,Am186ER,Am186ED,Am186CC, Am186CH,AM186CU②AMD ElanλSC300/310,SC400/410,SC520③INTEL80C186EA/XL,80C186EB,80C186EC,λ80386EX④NEC V-Series Processorsλ⑤VAutomation x86coresλ2.2保护模式:所有x86保护模式处理器包括:①AMD ELAN SC300/310,λSC400/410,SC520②AMD Am386,Am486,AMD-K6,Athlon③Intel386EX,486,Celeron,Pentium,Pentium II,III,IV二、PC104简介PC104是一种带有PC的PC兼容模块(电路板),它是一种标准。
《基于ARM处理器的通用数控系统的研究与设计》
《基于ARM处理器的通用数控系统的研究与设计》一、引言随着工业自动化和智能制造的快速发展,数控系统作为现代制造业的核心技术,其性能和效率的提升对于提高生产质量和降低成本具有重要意义。
本文将针对基于ARM处理器的通用数控系统展开研究与设计,探讨其技术特点、系统架构、设计方法及实际应用。
二、ARM处理器技术特点ARM处理器作为一种低功耗、高性能的嵌入式处理器,具有以下技术特点:1. 低功耗:ARM处理器采用先进的制程技术和低电压设计,具有较低的功耗,适用于长时间运行的数控系统。
2. 高性能:ARM处理器具有强大的计算能力和高速的数据处理能力,能够满足数控系统对实时性和准确性的要求。
3. 灵活性:ARM处理器支持多种操作系统和开发环境,可根据实际需求进行定制化开发。
三、系统架构设计基于ARM处理器的通用数控系统架构主要包括硬件和软件两部分。
1. 硬件架构:(1)ARM核心处理器:作为整个系统的控制中心,负责数据处理和指令执行。
(2)存储模块:包括内存、存储器等,用于存储程序代码、数据和结果。
(3)输入输出模块:包括人机交互界面、传感器、执行器等,实现与外部设备的通信和控制。
(4)电源模块:为整个系统提供稳定的电源供应。
2. 软件架构:(1)操作系统:采用嵌入式操作系统,如Linux或RTOS,实现多任务管理和资源调度。
(2)数控系统软件:包括数控编程软件、运动控制软件、数据管理软件等,实现数控系统的各项功能。
四、设计方法与实现基于ARM处理器的通用数控系统的设计方法与实现主要包括以下几个方面:1. 硬件设计:根据实际需求选择合适的ARM处理器型号和外围电路元件,设计合理的电路板布局和电路连接方式,确保系统的稳定性和可靠性。
2. 软件设计:采用模块化设计思想,将数控系统软件划分为多个功能模块,分别进行开发和调试。
同时,采用优化算法和数据处理技术,提高系统的运算速度和精度。
3. 运动控制算法设计:根据实际加工需求,设计合适的运动控制算法,如插补算法、速度控制算法等,确保加工过程的稳定性和精度。
基于PC104结构的龙芯1A嵌入式控制模块设计
基于PC104与MCX314运动控制芯片的数控系统的研究
PC104
PC104总线
运动控制器MCX314
伺 伺 伺伺
服 服 服服
驱 驱 驱驱
动 动 动动
器 器 器器
X
Y
ZU
I/O辅助控制
12. PC104与运动控制芯片MCX314 之间的通讯及接口
数控系统硬件采用了主从式双CPU结构模式。 PC机与运动控制器之间通过PC/104总线传递信息。 主要有:
缩短开发周期。软件开发简单、快速,使用运动控制芯片使 我们不再需要研发运动控制部分,可以由更少的软件研发人 员花更少的时间完成复杂的运动控制编程,能够大大缩短项 目的研发时间和工作量。
提高控制性能。用专业高性能运动控制芯片控制,可使电机 运动更快、更平稳、更安静、更精确。
提高系统可靠性。成熟的运动控制芯片中各项软硬件功能均 己相当成熟,比用户自己开发的更为可靠。同时采用此芯片 后,控制器的硬件器件大为减少,软件程序大为缩短,均有 助提高可靠性。
nP+P nP+N nP-P nP-N nEAP nECAN nECBP nINBN nINOP nINON
PULS+ PULSSIGN+ SIGN-
A+ AB+ BC+ C-
伺服驱动器
定位完成
nINPOS
COIN
报警信号
nALARM
ALM
MCX314与伺服驱动器的输入与输出信号
超程限位 开关输入
nLMT+ nLMT-
减速停止 开关输入
nIN1 nIN2 nIN3
回零信号
ZERO
I/O辅助控制信号
急停输入
EMG
光栅尺
G+
信号输入 G-
基于ARM处理器的PC/104模块设计
N0 2 .
微
处
理
机
第 2期
20 0 8年 4月
Ap ., 0 r 2 08
MI CROP ROCES SOR S
基 于 A M 处 理 器 的 P /0 R C 14模 块 设 计
张 建, 李付坤 , 孙广富
( 防科技 大学 电子科 学与工 程学 院卫 星导航定 位研发 中心 , 沙 4 07 ) 国 长 103
St o pt ) P e C m ue C U开 发领 域 不 断 取 得 突 破 , 结 构 r 其 已经从 V 3发 展 到 V 。A M 首 创 了 C IL S 6 R H P E S的
3 基 于 X 6的 P / 0 8 C 14模 块 的 缺 点
首先 , 于 X 6的 P / 0 基 8 C 1 4处理 器 模 块 的成本 比较高 , 市场上 常 见 的模 块 价 格在 千 元 以上 ; 二 , 第
K yw r s o d : R r s ; C 14m d l; m e d dss m c o e
1 引 言
P /0 一种 专 门为 嵌 人 式 应 用 而 定 义 的 总 C 14是 线,E I E协会 将 它定 义 为 IE E E E—P9. , 号 定义 96 1信 和 P / T基本一致 , 电气 和机 械规 范却完 全不 同 , CA 但
N i a n .o e neTcnl y C a gh 10 3 C i ) t n Uv ao l i fDf s e o g ,h nsa40 7 ,hn e h o a
Ab tac : sr t PC/1 4 s u s e il p le n mb d e y t m.I t e r c s o e in i g 0 i a b s p ca l a pi d i e e d d s se y n h p o e s f d sg sn PC 0 mb d e c mp tr a e o ¥ C2 0 /1 4 e e d d o u e b s d n 3 41 ARM p o e s r,t i p p r rc so h s a e manl i to u e t e i y nrd c s h a c ie t r r h t cu e,bu n e a e a d p rp e a n e a e, u tn o wa d t e s l in frt e a p ia in o h s itr c n e i h r li tr c p ti g fr r out o p lc t ft e f f h o h o ARM r c s o n PC/ 0 o i p o e s ri 1 4 d ma n.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5 系统 结 构 基于 A RM 的 P C/ 1 0 4系 统 主 要 由 处 理 器 、总 线 接 口 、
F l a s h、 实 时 时钟 、 复位 电路 、 通 讯接 口 、 调试 接 口 、 电源 几 个部 分
组成 , 如 图 1所 示 。
维普资讯
场 合 , 一 块 AR M 芯 片 可 以 满 足 所 有 的 需 要 ; 第 四 ,价 格 低 廉 ,
在工 业 控制 和 数 据采 集 中 , P C/ 1 0 4模 块 的 总线 、 串 口功 能 是 必 不 可少 的 , 而硬盘接 口、 并行 口、 键 盘 口等 l O 口却 很 少 应 用, 因此 在选 用另 外 的 CP U代替 x 8 6作 为 P C / 1 0 4模块 的 处理 器首 先要 求 能 够兼 容 原有 的 P C / 1 0 4总线 ,使 得 符 合 P C/ 1 0 4 规范 的数字 量输 入/ 输 出模 块 、模 拟量 输 入/ 输 出模 块 以及针 对 P C / 1 0 4系统 开 发 的各 个 系统 能 够正 常 使用 ;其 次该 处理 器 必 须 具 有 2个 串行 接 口,以适 应 大 部分 场 合 的 串行 通讯 需 要 ; 第
断 电时保 持 系统 时 间 不 变 ; 第五 , 友好 的 开发 环 境 , 以适 应 现 代
系统 开发 的需要 。
1 6 / 3 2位 A RM7 T D Ml — S CP U, 并 内置 2 5 6 K字节( K B ) 的高 速 F l a s h存 储 器 。1 2 8位 宽 度 的存 储 器接 口和 独 特 的加 速 结构 使
K e y wo r d s : P C/ 1 0 4, A RM, E mb e dd e d S y s t e ms
摘 要 P C / 1 0 4是 一 种 专 门 为 嵌 入 式 应 用 而 定 义 的 总 线 。 本 文介 绍的是 一 种基 于 L P C 21 2 9 AR M 处理 器的 P C/ 1 0 4模块, 介
6 0 MH z ) , 功耗为 5 4 mW , 不到 3 8 6 S X的 十分 之一 ; 第三, 集 成 度 高、 功能 强 大 , 很 多世 界 著名 的半 导 体 厂家 都 购买 了 A RM 的 内 核 ,并根 据 市 场 的需 要 推 出 了集 成 丰 富外 围 功 能包 括 S R A M、 R T C, CA N接 口、 串行 口 、 以 太 网 接 口等 等 的芯 片 , 在 很 多 应用
基 于 AR M 处理 器 的 P C/ 1 0 4处 理 器模块 的开 发
6 . 3 驱 动 程 序
, 2 3 4 5 6 7 8 9 ” 佗 统 , 为 了兼 容已有 的系 减 少软 件 移植 的工 作量
3 3、 , c。 。
, 因此 在编 写
底 层驱 动 程 序时 已 充分 考 虑和 DOS开 发环境 的底 层驱 动 程 序
嵌 入式 系统 。基于 P C / 1 0 4 结 构 的 模 块 由 于 开 发 方 便 、品 种 丰
开始执 行用 户程 序一般 需要 2 — 5秒 时 间 , WD T溢 出时恢 复 时 间 较长, 容 易遗漏 一些 重要 的事 件 。 第五 , 开 发环 境不 够 友好 , 基 于 3 8 6 S X 的 P C/ 1 0 4处 理 器 模 块 的程 序 一 般 在 D OS环 境 下 开 发, 开发 工 具 一 般 为 T UR B O C或者 B OR L AND C, 开 发环 境 比较落 后 , 编程 、 调试 非常 的不 方便 。 3 A RM 处 理 器的特 点
维普资讯
《 工业控 制计 算 机} 2 0 0 4年 1 7卷 第 1 2期 1 9
基于 A R M处理器的 P C / 1 0 4处理器模块的开
梁军 兵 、 赵 鸿呜 金 建祥 、
1 浙江 大学先进控 制研 究所 ( 3 1 0 0 2 7 ) 2 浙江浙 大中控信 息技 术有 限公 司( 3 1 1 1 5 3 )
绍 了利 用 A RM 处 理 器 开 发 P C / 1 0 4处 理 模 块 的 基 本 结 构 、 总 线技 术 、 串行 通 信 接 口 以 及 驱 动 程 序 , 为 AR M 处 理 器在 P C/
1 0 4领 域 的 应 用提 供 了 一 种 新 的 思路 。
关 键词 : P C / 1 0 4, A RM , 嵌 入 式 系 统
P C/ 1 0 4是 一 种专 门为 嵌 入式 应 用 而 定 义 的总 线 , l E E E协 会 将 它定 义 I E E E — P 9 9 6 1 , 信 号 定 义和 P C / AT基 本一 致 , 但 电 气 和机 械规 范却 完 全 不 同 , 是 一 种优 化 的 、 小型 、 堆 栈式 结 构 的
2 基于 I n t e 1 3 8 6 SX的 P C/ 1 0 4模 块的 缺点 首先 ,基 于 3 8 6 S X 的P C/ 1 0 4处 理 器模 块 的成本 比较 高 , 3 8 6 S X / 4 0的控 制 模 块 的 价 格 在 千元 以上 ; 第二 , 功耗较大 , 数 瓦 的功耗 给 电源供 应 、 散热 的设 计带 来 一 系列 的 问题 , 并 且 不适 合某 些低功 耗要 求 的环境 中应用 ;第三 :程 序烧 写 繁琐 ,基 于 x 8 6的 P C/ 1 0 4的 处理 器模块 一般 采 用 D OC ( Di s k On Ch i p )
AR M 内核 , 通 过将 A RM 内核 授 权 给 半 导 体 公 司 , 由半导 体 公 司
基于 CI S C架 构 3 8 6 S X / 4 0的 1 3 MI P S;其 次 ,功 耗 非 常低 , 例
L P C2 1 2 9的 内 核 耗 电 仅 为 3 0 mA ( 供 电 电压 为 1 . 8 V, 时 钟 为
根据 实际 的应 用 情 况 加上 各种 外 围 的功 能 比如 F l a s h 、串 口 、 R T C等 构成 一块 完整 的芯 片 。 本文 主要介 绍 基于 AR M的 P C/ 1 0 4模块 的结 构 , 并给出了
总线 模拟 、 串 行 通 讯 接 口 以 及 驱 动 程 序 的 相 关 内容 。 1 P C/ 1 0 4处 理 器 模 块 的 要 求
经过 8 0 1 8 6、 X 51 、 AR M、 DS P等 多种 CP U 比较 后最 终确 定 采 用 AR M作为 P C1 0 4处理 器模 块 的替 代处理 器 ,为 了兼 容原 有 的基 于 P C / 1 0 4设 计 的板 卡 。经 过 多家 AR M 产 品 的 比较 , 最 终 确 定采 用 P HI L I P S L P C2 1 2 9作 为本 次 开 发 的 P C / 1 0 4处 理
Abs t r ac t
P C/ 1 0 4 i s a b u s o f e mb e d d e d s y s t e m a n d a b r o a d a p pl i e d i n i n d u s t r i a l T h i s p a p e r ma i n l y i n t r o d u c e s a P C/ 1 0 4 mo d u l e d e v e l o p e d wi t h L P C2 1 2 9 AR M p r o c e s s o r , i n c l u d i n g s t r u c t u r e , b u s i n t e r f a c e , s e r i a l i n t e r f a c e a n d d r i v e r I t S a n e w a p p l i c a t i o n f o r AR M p r o c e s s o r i n P C/ 1 0 4 a r e a
首先 , 速 度快 , AR M 是一 种 基 于 R I S C 架构 的处理 器 , 运 行 在4 4 MH z的 AR M 的处 理器 的 处理 能力 可 大 4 0 Ml P S,远 大 于
富、 结 构 简单 等优 势在 工业控 制 领域有 着 广泛 的应 用 。 A R M( Ad v a n c e d RI S C Ma c h i n e) 公 司 成立 于 1 9 9 0年 1 1 月, 是苹 果 电脑 , A c o r n电脑 集 团和 V L S I T e c h n o l o g y的合 资企 业 。A RM 首 创 了 CHl P L E S S的模 式 ,该 公 司 只设 计 出 高效 的
M 挖 伯侣 仃 垤写 ¨总线 ” 驱 动 程 序 时 编写 了 u 兼 容 ,比如 在编 n s i g n e d c h a r i n
复位
ARM
B B
磋刚 盯叫 酷盯朗
{
p o r t b ( u n s i g n e d i n t p o r t A d d r e s s ) 和 v o i d o u t p o r t b ( u n s i g n e d i n t p o r t A d d r e s s . u n s i g n e d c h a r v a l u e ) i  ̄- ' b 函数 :
v o i d o u t p o r t b ( u n s i g n e d i n t p o r t A d d r e s s , u n s i g n e d c h a r v a l u e )
块 的开 发 。
或者 D OM( D i s k On M o d u l e ) 作 为程 序存 储 器 , 由于 D O C 的专
用 烧写 工具 比较 昂贵 , 所 以实际 生产 时 多采 用 人工烧 录方法 , 包 括格式化、 复 制 多个 步骤 , 每 烧 一块 芯 片需 要 断 电 、 重新 启 动 机 器数 次 , 效率 低 下 、 操 作 繁琐 ; 第 四, 系统 启 动速 度慢 , 从 上 电到