基于DSP的传感器技术综述
基于DSP的无位置传感器BLDCM电流换相控制研究及系统实现
l 『
{ 日
压
是 6 角度 对 应 的时 间 . 0电 这样 就 建 立 了电 角 度 与 时 间
西 厦 电 被
电
之 间 的联系 :可 得 t =P 2 t =P 4; ’ / ,】 / b=2 ( P 这里 “ :” 表示 对 应关 系 ) :程 序 流程 图见 图 4 。
i i l
一
I
! 一 一 一 一 k一 一 l
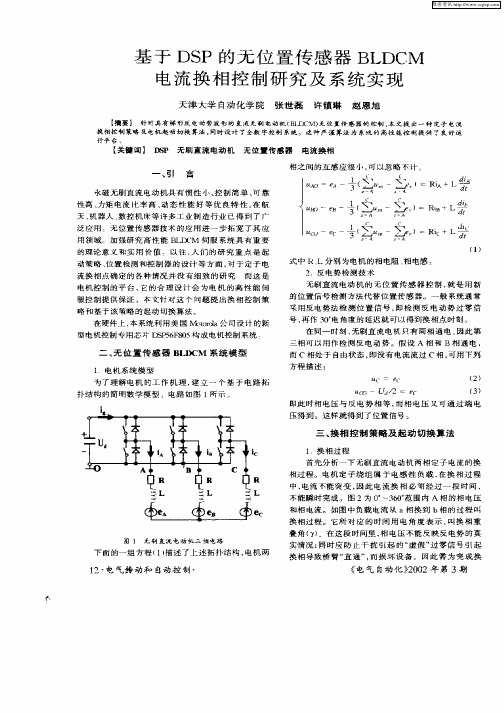
图 2 A 帽 相 电 压 和 相 电 流
一
2 换 相控 制 策 略
无位 置 传感 器 控 制 获得 的位 置 信 号 易受 到外 部 干
扰而 不准 确 。需 要 对 信号 进 行 处 理 来 矫 正 出 现 的不 正
囊 。 I N — 一
换 相 导致 桥 臂 “ 通 ” 而 损 坏 设 备 。 因此 需 为 完 成 换 直 .
下 面 的一 组 方 程 ( ) 述 了 上述 拓 扑 结 构 , 机 两 1描 电
1 电 气 抟 动 和 自动 控 制 ・ 7・
《 气 自动 化 》 f 2年 第 3期 电 2) 0
维普资讯
目g∞ 日
牦
在 区间 Ⅲ , 电势 过 零 信 号 延 迟 过 长 或 丢 失 。 这 反
电
压
.
i
L . . . .
『 I此 时 刻也 作 为 过零 时刻 t 。 =t
1
时将 对 应 的 时 间 t 为 换 相 点 时 刻 T’ = , 时 3作 ’ 同 对于 本 系 统 , =0; 1 。 满 足 整 个 调 速 范 围 日= 5可 内换 相 过程 的 要 求 ; =1 0 即两 次过 零 周 期 对应 的 电 2。 角度 取 相 邻 过 零 点 之 间 的 时 间 作 为 过 零 周 期 P 它 ,
基于DSP的无速度传感器控制系统研究
由电机数 学模 型 可知 , 电 机 转 速 与 转 子 磁 链 的 电 压 模型无关, 而 与 转子 磁链 的 电流模 型 有关 , 所 以参 考 模 型选择 转子 磁链 电压 模型 , 而 可 调 模 型 选 择 转 子 磁 链 电
流 模 型[ 3 1 。 辨识 对象 :
一
无 速 度 传 感 器 技 术 的 发 展 始 于 传 统 带 速 度 传 感 器
T a n Xi a o k u n, Z h a o J i n x i a n
( C o l l e g e o f E l e c t r i c a n d I n f o r ma t i o n E n g i n e e r i n g , He i l o n g j i a n g I n s t i t u t e o f S c i e n c e a n d T e c h n o l o g y, Ha r b i n 1 5 0 0 2 7, C h i n a )
1 9 8 5年 首 次 提 出 以 其 新 颖 的 控 制 思 想 ,简 洁 的 系 统 结 构 和 优 良 的 动 静 态 性 能 已 广 泛 应 用 于 交 流 传 动 系 统 …。 通过 转矩 误差 和磁链 误差 选取 电压空 间矢 量 , 优 化 控 制
电压 型逆 变器 的开关 状态 , 方 法简 单并 易 于实现 。
Ab s t r a c t : I n o r d e r t o a c c u r a t e l y o b s e r v e t h e mo t o r s p e e d, t h i s a r t i c l e b a s e d o n t h e mo t o r r o t o r f l u x o f MRAS s p e e d
基于DSP的无刷直流电机无位置传感器控制的实现
敏 感区 , 导致系统可靠性变 差。 因此 , 无位置传
感 器是 无刷 直流电动机 的理想选 择 , 具有 广 并 泛 的发展前景。 本文介绍的控制系统 中采用的是
.
相信号, 每相的感应电动势都有2 个过零点, 这样 三相共有6 个过 零点。 如果能够通过一种 方法测
量和计算出g6 _个过零点, 再将其延迟3 。 0就可以
电相 的反 电动势可以被 测 出, 间接 得到转 子位 自2 世纪 5 年 代 出现 以来 , 刷直流 电动 0 0 无 机不仅保持了传统 直流电动机 良好的动、 静态特 性, 而且结 构简单 、 无换 相火花 、 行可靠 , 运 调 速性能好、 易于控制。 传统的无刷直流电动机大
多以霍尔元件或其他元件作位 置检测传感器, 但
传感器 的直流无刷 电机在 内的多种 电机 进行控
制。 该芯片内部集成了前端采样A D / 转换器和后 端P WM输出硬件, 满足系统实时性要求 的同 在 时可以简化硬件 电路设计, 将DS 的高运算速度 P
无位
与面向电机 的高效控制能力集于一体。 具有低成
本低功耗的特点。
1 控制原理
摘
要: 介绍 了一种基于T 3 0 F 4 7 Ms 2 L 2 0 ADs 的无 P
T 30 F4 7 D P MS2 L 2 0A S 芯片作为控制器 , 它是美国
T 公 司专 门为 电机 控制 设 计 的 , 用于对 无 位 置 I 可
位置传 感器 的无 刷直 流电动机 的控制 系统 , 论述 了电动
11 无 位 置传感 器无刷 直 流 电动机 的工作原 理 .
r d c d Ho t u f l h o o o i o i g c re t to u e w o f l l t e r t rp st n n , u r n a i i me - s r me t n W M i n l u p twa r s n e swela u e n dP a sg a t u sp e e t d a l s o h a d r ic i a d s fwa e c n r l o k Th , t m t eh r wa ec r u t n o t r o to l c . es r e b y s p s e s d t d a t g s o mp e c n t c i n h g e i o sse he a v a e fs n i l o sr to , ih r l u - a ii n e t r ta y& d n mi e f r n e b l y a d b te e d t s y a cp r o ma c . Ke wo d : M S 2 L 2 0 A Br s l s y rsT 30 F 4 7 u h e sDC t r mo o Un o i o e e s r p s in dsn o t
基于DSP的无位置传感器永磁同步电机磁场定向控制系统
基于DSP的无位置传感器永磁同步电机磁场定向控制系统本文着重介绍了一种改进算法,即取消相电流传感器且采用滑模观测器实现无位置传感器速度控制。
永磁同步电机(PMSM)是近年来发展较快的一种电机,由于其转子采用永磁钢,属于无刷电机的一种,具有一般无刷电机结构简单,体积小,寿命长等优点[1]。
本文讨论空间矢量控制的永磁同步电机,采用磁场定向算法借助DSP 高速度实现对转速的实时控制。
由于控制算法必须获取转子位置信息,所以传统的控制系统都需要以光电编码器等作为转子位置传感器。
为了最大限度减少传感器,本文从改变相电流检测方法,建立采用砰-砰控制的滑模观测器,介绍一个可以实现的模型。
2磁场定向原理磁场定向控制,简称FOC。
如图1 所示,两直角坐标系:αβ坐标系为定子静止坐标系,α轴与定子绕组a 相轴重合;dq 为转子旋转坐标系,d 轴与转子磁链方向重合,并以同步速ωr 逆时针旋转。
两坐标系之间的夹角为θe。
可以把定子电流综合矢量is,在旋转坐标系dq 轴上如下式分解is=isd+isq (1)在交流永磁同步电机中,转子为永磁钢,可认为转子电流综合矢量的模大小不变,常用常数值IF 代表。
根据交流电机电磁转矩T 与定、转子电流综合矢量的普遍关系式[2]式中p 极对数L12 定、转子互感i1 定子电流综合矢量i2 转子电流综合矢量δ定、转子综合矢量间夹角这样电磁转矩只随|i1|和角δ变化。
为了获得简单可控的转矩特性,可以给定定子电流综合矢量指令使其始终在q 轴上,即δ=90°,从而得式中Is 定子电流综合矢量的模按上式可以实现用定子电流综合矢量的模来直接控制电动机电磁转矩,从而使永磁同步电动。
基于DSP的无位置传感器BLDC速度控制

流 电机速度 控制 系统 。
由上 面可知 , 如果 不 考 虑 因 电枢反 应 引 起 的磁 通 变化 , 刷直 流 电动 机 的电磁 转矩 表达 式 和普 无 通直 流 电动 机相 同 , 电磁 转矩 与 磁通 和 电流 幅值 其 成正 比 , 以控 制 逆变 器输 出方 波 电流 的幅值 即可 所 控制无 刷直 流 电动机 的转 矩 。
关 键词 :D P;无 位置传 感器 ;无刷 直 流 电机 S
Re e r h o e s re s BLDC eo iy c n r ls se s a c n s n o ls v l ct o t o y t m b s d o P a e n DS
W EIZ ic e g.MA u—in h —h n Yo l g a
换 器上 , 通过控 制功 率 晶体 管 的关 断顺 序 和 时 间来
改 变 电动机定 子绕 组 中 的电 流 大小 和 导通 顺 序 , 从 而 实现对 无 刷 直 流 电动 机 转 速 和输 出 转 矩 的 有 效
基于DSP技术及互相关算法的光纤液滴传感器
基 于 D P技 术 及 互 相 关 算 法 的光 纤 液 滴 传 感 器 S
孙伟民 万 众 郭 明磊 , , ,张志林 ,张建 中。
( . 尔滨 工程 大 学 理 学 院 , 龙 江 哈 尔滨 10 0 ; . 1哈 黑 50 1 2 中兴 通 讯 股份 有 限公 司 , 海 2 10 ) 上 0 2 3 摘 要: 光纤 液 滴 分 析 技 术是 通 过 反 映 被 测 液体 的液 滴 生 长 过 程 的光 纤 液 滴 指 纹 图 , 量 被 测 液 体 的 物 理 、 测 化
cudb sdt jd eitol udsm ls r sme T eapi t no S c nq ese d pt prt no o l eue g q i a pe e a , h p l ai f Pt h iu e s eo e i f ou fw i a c o D e p u h ao
Ab tac :Th b rlq i r p s n o a e u e o mo t rt e d ip n r c s fa lq i r p a d o ti h sr t e f e i ud d o e s r c n b s d t ni h rp i g p o e so i u d d o n b an t e i o
学特性. 互相关原理被用来对不 同液体 的光纤 液滴指纹 图进行 对 比分析 , 分析 液体性质 或判决 2种 液体的异 同 ,S D P技术的使用提高 了互相关运算 的速度. 基于 D P技术和互相关原 理制作了实验室样机 , S 并进行 了样 品 测试. 分别利用互相关函数和互相关系数测试 了不同浓度的酒精溶液 , 测试 结果显示 , 互相关 函数 峰值可以作
第3 7卷第 5期 21 00年 5月
基于DSP的相关法超声传感器系统设计
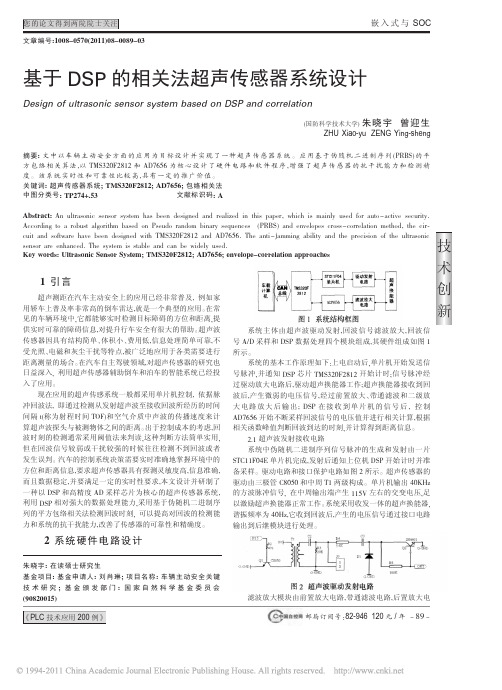
邮局订阅号:82-946120元/年技术创新嵌入式与SOC《PLC 技术应用200例》您的论文得到两院院士关注朱晓宇:在读硕士研究生基金项目:基金申请人:刘肖琳;项目名称:车辆主动安全关键技术研究;基金颁发部门:国家自然科学基金委员会(90820015)基于DSP 的相关法超声传感器系统设计Design of ultrasonic sensor system based on DSP and correlation(国防科学技术大学)朱晓宇曾迎生ZHU Xiao-yu ZENG Ying-sheng摘要:文中以车辆主动安全方面的应用为目标设计并实现了一种超声传感器系统。
应用基于伪随机二进制序列(PRBS)的平方包络相关算法,以TMS320F2812和AD7656为核心设计了硬件电路和软件程序,增强了超声传感器的抗干扰能力和检测精度。
该系统实时性和可靠性比较高,具有一定的推广价值。
关键词:超声传感器系统;TMS320F2812;AD7656;包络相关法中图分类号:TP274+.53文献标识码:AAbstract:An ultrasonic sensor system has been designed and realized in this paper,which is mainly used for auto-active security.According to a robust algorithm based on Pseudo random binary sequences (PRBS)and envelopes cross-correlation method,the cir -cuit and software have been designed with TMS320F2812and AD7656.The anti-jamming ability and the precision of the ultrasonic sensor are enhanced.The system is stable and can be widely used.Key words:Ultrasonic Sensor System;TMS320F2812;AD7656;envelope-correlation approaches文章编号:1008-0570(2011)08-0089-031引言超声测距在汽车主动安全上的应用已经非常普及,例如家用轿车上普及率非常高的倒车雷达,就是一个典型的应用。
基于DSP的容栅传感器输出信号处理
收稿日期:2009年5月基于DSP的容栅传感器输出信号处理傅宗纯,周文祥西南交通大学摘要:容栅传感器具有性价比高、体积小、环境适应能力强等优点,在与位移有关的各类测试中已获得广泛的应用。
为实现远距离现场测试监控,介绍一种对容栅传感器输出信号进行接收处理的方案。
该方案基于TMS320LF2407中的capture单元和SPI模块,在软件上采用两个中断的方法来实现,经实验证明数据接收稳定可靠。
相对单片机处理电路而言,该方案电路外围元器件少,处理速度快,可靠性高且编程方便,在车间现场环境恶劣的位移测试中具有一定实用价值。
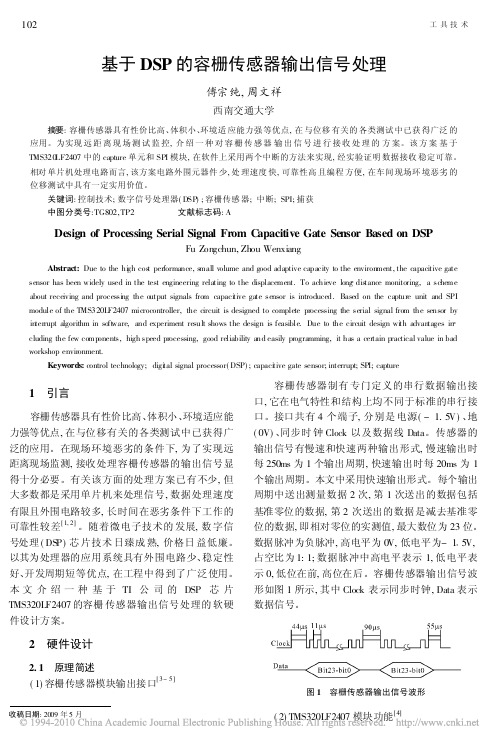
关键词:控制技术;数字信号处理器(DSP);容栅传感器;中断;SPI;捕获中图分类号:TG802,TP2 文献标志码:ADesign of Processing Serial Signal From C apacitive Gate Sensor Based on DSPFu Zongchun,Zhou WenxiangAbstract:Due to the hi gh cos t performance,s mall volume and good adaptive capacity to the environ ment,the capacitive gate sensor has been widely used in the test engineering relating to the displacement.To achieve long dis tance monitoring,a scheme about receiving and processi ng the output signals from capaci tive gate sensor is introduced.Based on the capture unit and SPI module of the TMS320LF2407microcontroller,the circuit is designed to complete processing the serial signal from the sensor by in terrupt algorithm in soft ware,and experiment result shows the design is feasible.Due to the circuit design wi th advan tages in cluding the few comp onents,high speed processing,good reliability and easily programming,it has a certain p ractical value in bad workshop environment.Keywords:control technology;digi tal signal processor(DSP);capaci tive gate sensor;interrupt;SPI;capture1 引言容栅传感器具有性价比高、体积小、环境适应能力强等优点,在与位移有关的各类测试中已获得广泛的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于DSP的传感器技术综述姓名:唐红星学号:200816022123专业:电子信息科学与技术教师:张果时间:2011-06-14一.前言: 01.数字信号处理(Digital Signal (1)2.DSP的起源(The Roots of DSP) (1)二.DSP技术在光纤电压传感器中的应用 (2)1引言 (3)2 TMS320C31特点 (3)2. 1 TMS320C3X是TI的第3代产品,也是第1代浮点DSP芯片。
(3)2.2流水线 (4)2.3专用的硬件乘法器 (4)2.4特殊的DSP指令 (4)2.5快速的指令周期 (4)3 光纤电压传感器的实现原理与系统构成 (4)4.DSP技术的具体实现方案 (5)4.1硬件结构 (5)4.2软件结构 (5)5 性能改进及结论 (6)三.心得体会: (6)四.参考资料: (7)一.前言:数字信号处理(Digital Signal Processing,简称DSP)是一门涉及许多学科而又广泛应用于许多领域的新兴学科。
20世纪60年代以来,随着计算机和信息技术的飞速发展,数字信号处理技术应运而生并得到迅速的发展。
数字信号处理是一种通过使用数学技巧执行转换或提取信息,来处理现实信号的方法,这些信号由数字序列表示。
在过去的二十多年时间里,数字信号处理已经在通信等领域得到极为广泛的应用。
德州仪器、Freescale等半导体厂商在这一领域拥有很强的实力。
术语“DSP”是数字信号处理的英文缩写。
数字信号处理是电子设计领域的术语,在这样的领域中,用离散(在时间和幅值两个方面)的采样数据集来表示和处理信号和系统,在出版的书和杂志中有大量的这方面的研究和数学算法。
最初,大多数数字信号处理是在主机和其它通用数字计算机上离线完成的。
这就是所谓的数字数据的“后处理”。
随着在最近的二十多来年集成电路的复杂性和集成度的飞速增加,开发出专用处理芯片器,它能实时或“在线”进行数字信号处理。
这些芯片被称为数字信号处理器(DSPs),并在半导体工业中成为最大的增长市场。
从1988年至今,DSP的市场每年增长40%。
这就意味着将引入更高性能的DSPs(及与DSP有关的产品),并以较低的价格销售。
结果有双重意义:第1,随着时间的推移,更多的信号处理可在更快和更复杂的处理器内完成。
第2,便宜的DSPs进入更多产品,这些产品如,手持电话、无磁带电话录答机、寻呼机(pager)、高保真度立体声设备和汽车中的主动悬挂系统(active suspension systems in cars)。
1.数字信号处理(Digital SignalProcessing——DSP)强调的是通过专用集成电路芯片,利用数字信号处理理论,在芯片上运行目标程序,实现对信号的某种处理.数位讯号处理(Digital Signal Processing)是二十一世纪形成科学和工程最具威力的技术之一。
在各领域内广泛的范围中已经发生革命性的改变:通讯、医疗影像、雷达和声纳、高保真度(fidelity)音乐重制,和原油探勘,只有这些有被命名。
每一个领域的DSP技术都已发展到一定的深度,有它们自个儿的演算法、数学和特定的技巧。
结合广度与深度使得任何人都不能精通所有已被发展的DSP技术。
DSP教育包含二项工作:学习一般可套用於整体的概念,以及对你感兴趣的特定领域学习专业的技巧。
本章藉由描述DSP已在数个不同领域中造成的戏剧般效应来开启我们进入数位讯号处理(Digital Signal Processing)世界的旅程。
革命已经开始了。
2.DSP的起源(The Roots of DSP)数位讯号处理不同於其它电脑科学中的领域是由於它使用的资料型别的唯一性:讯号(signals)。
在大多情况下,这些讯号起源於现实世界中知觉的(sensory)资料:地震的摆动(seismic vibrations)、视觉影像、声波等……。
在讯号已经被转换为数位型式后,DSP是数学、演算法和用来处理这些讯号的技术。
这包含广泛、多变化的目标,例如:强化视觉影像,辨识和产生对话(语音),为了储存和传送的资料压缩,等……。
假设我们加一个「对比到数位的转换器」给电脑,并用它来撷取一部份真实世界的资料。
DSP回答了问题:下一步是什麼?DSP的起源是在1960和1970年代,当数位电脑首度变成可用时。
电脑在这个时代是很昂贵的,而DSP受限於只有一些关键性的应用。
先锋们主要努力於四个关键领域:冒著国际的安全性危险的雷达和声纳,可以赚大把钞票的原油探勘,资料有不可取代性的太空探索和可以救命的医学影像。
1980和1990时个人电脑的革命使得DSP新的应用突然遽增。
动机并非是由於军事和政府的需求,DSP突然被商业市场驱动了。
任何认为他们可以在快速扩大的领域中赚钱的人全都突然变成是DSP的厂商。
DSP在这样的产品中变成众所皆知的了:行动电话,CD (compact disc players),和电子语音邮件。
此技术革命由上而下发生。
在1980早期,DSP在电子电机领域中是在研究所课程中教授的课程。
十年后,DSP已经变成大学标准课程的一部份。
今日,DSP变成在许多领域中被科学家和工程师需要的基本技巧。
以此类推,DSP可以被和之前技术革命中的「电子学(electronics)」相比。
虽然仍是电子电机领域,几乎每个科学家和工程师都有些基础电路设计的背景。
没有的话,他们可能会迷失在技术的世界中。
DSP也有相同的未来。
二.DSP技术在光纤电压传感器中的应用[关键词]DSP技术电压传感器[摘要]光纤电压传感可以用于电网电压的监测和保护。
本文对体调制型电压传感器的原理进行了分析,并提出信息处理单元采用DSP技术新方法,讨论了整个系统的构成以及信息处理单元的硬件和软件结构,对系统的性能进行了分析并与信息处理单元采用80C196的传感器进行了比较,确定了本光纤电压传感器可以达到各项性能指标。
1引言现代化高速电气铁路的供电安全是高速列车行车的重要保证,如何有效可靠地监测供电网的运行状态,是一个重要的课题。
近年出现的光纤电压传感器,具有抗电磁干扰、测量精度高、耐过压、安全、可靠等优点,因而很适合对高压进行监测。
但在高压监测时,对实时性和精度的要求很高,其波形输入、输出的相移应小于1。
,精度应控制在±1%。
以前数据处理单元芯片选用的是80C196,但是由于该芯片在精度和速度上的一些限制,使得传感器系统勉强能满足部分指标,离实用化还有不小的差距,为了大幅度提高系统的技术指标,我们选用TI 公司专用数字信号处理芯片TMS320C31作为数据处理单元的核心芯片。
由于TblS320C31具备适合数字信号处理的独特硬件结构、软件指令,所以改进后的光纤传感器系统性能必有大幅度的提高,能够向真正实用化大幅度迈进一步。
2 TMS320C31特点2. 1 TMS320C3X是TI的第3代产品,也是第1代浮点DSP 芯片。
TMS320C3X中目前具有TMS320C30、TMS320C31和TMS320C32这3种。
TMS320C31是TMS320C30的简化和改进型,它在TMS320C30的基础上去掉了一般用户不常用的一些资源,降低了成本,是一个性能价格比较高的浮点处理器,在国内已得到了较广泛的应用。
C31具有不同于一般处理器的硬件结构,分别简介如下: 2.1哈佛结构哈佛结构是不同于传统的冯·诺曼结构的并行体系结构,其主要特点是将程序和数据存储在不同的存储空间中,即程序存储器和数据存储其实是两个相互独立的存储器,每个存储器独立编址,独立访问。
与两个存储器相对应的是系统中设置了程序总线和数据总线,从而使数据的吞吐率提高了1倍。
2.2流水线与哈佛结构相关,DSP芯片广泛采用流水线以减少指令执行时间,从而增加处理器的处理能力。
TMS320C3X采用四级流水线,也就是说处理器可以处理4条指令。
这样就使得取指、译码、执行等操作可以同时进行,每个指处于不同的阶段。
2.3专用的硬件乘法器在通用的微处理器中,乘法指令是由一系列加法来实现的,故需多个指令周期来完成。
相比而言,DSP芯片的特征就是有一个专用的硬件乘法器。
这样在完成DSP的重要组成部分即乘法时,速度就要快得多。
2.4特殊的DSP指令结合DSP芯片的特殊硬件结构,DSP芯片采用了特殊的指令,这样在实现一些特殊的DSP算法时就特别方便。
2.5快速的指令周期哈佛结构、流水线操作、专用的硬件乘法器、特殊的DSP指令再加上集成电路的优化设计,可使DSP芯片的指令周期在200ns以下。
具体地说,我们所采用的TMS320C31的指令周期为33/40/50/60/74ns。
3 光纤电压传感器的实现原理与系统构成在不加电时,BGO晶体是属于立方晶体,是各向同性介质,当在BGO晶体的(110)镜面加电压时,由于Pockels效应,晶体将变成双轴晶体,两主轴方向的折射率差与加在晶体上的电压成正比,当以(110)方向沿两折射率主轴各通过一线偏振光时,它们之间的最大相位差可表示为φ=2πn03r41UI/dr=πU/Uπ (1)式中:φ表示由电光效应产生的相位差; r真空波长; n0为晶体的真空折射率; r41为电光系数; 1为传光方向晶体长度; U为外加电压;d为电场方向晶体长的长度。
U=rd/2n03r41l为半波电压,它仅与晶体和入射光波长有关。
代入n0=2.07、r41=1.03×10-10cm/V、r=0.82μm、d=8mm、1=10mm可以得到半波电压U=37kV0由(1)式可见,π正比于被测电压。
我们可以通过检测φ求得被测电压。
系统构成如图1所示,光发射的驱动电路产生等幅占空比为50%的连续方波,经LED变成光脉冲序列,被测电压在传感头上对光脉冲序列进行调制,成为调幅脉冲序列,该信号经光纤到达探测器。
探测器将它变成电信号,信号处理电路将探测器提供的电信号进行放大滤波,再由TMS320C31处理后得到即时波形、有效值和频谱图。
4.DSP技术的具体实现方案信息处理单元 DSP信息处理单元主要完成信号的滤波、计算、FFT变换以及输出的任务,现在就其硬件和软件的结构、工作过程分别进行介绍。
4.1硬件结构光电转换后的模拟信号,经过直流放大等预处理后,进入AIC芯片TLC32044.来完成直流和交流成分的模数转换。
数据流通过串行口进入C31芯片,在C31中,信号主要完成噪声滤除、FFT变换、有效值计算等变换,并将计算结果输出到相应的输出设备上。
其中EPROM 27512主要完成初始化的数据和固化好的程序;快速RAM 7C199可以满足大型程序的无等待运行;双口RAM7C133,暂存C31的输出数据,负责DSP和电脑的通信工作;TLC32044是高精度A/D、D /A转换芯片,负责系统的输入A/D以及输出n/A的转换工作。